Выбор оптимальных вариантов маршрутов съемок для космической системы дистанционного зондирования Земли

Автор: Ковтун Владимир Семенович, Строченкин Алексей Владимирович, Фролов Владимир Николаевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Бортовые и наземные комплексы управления и системы
Статья в выпуске: 3 (6), 2014 года.
Бесплатный доступ
В данной статье рассматривается система управления космической системой дистанционного зондирования Земли. Рассмотрена основная задача рабочего процесса управления системой с помощью метода анализа иерархий и декомпозиции сложного процесса моделирования начальных условий съемки поверхности Земли. Этот метод позволяет минимизировать временные затраты на подготовку и планирование съемок, а также оценить реализуемость программы наблюдения и ее эффективность с точки зрения использования ресурсов космической системы дистанционного зондирования Земли.
Космическая система, дистанционное зондирование земли, система управления, иерархическая структура, декомпозиция структуры, матричный метод анализа иерархий
Короткий адрес: https://sciup.org/14343452
IDR: 14343452 | УДК: 629.783:528.7/.8
Choosing optimal survey routes for Earth remote sensing space system
Earth Remote Sensing Space Systems (ERS SS) are the systems with the fastest development dynamics and the program of work on them is considerably expanding. Therefore, much attention is always focused on such subjects as selection of ERS SS configuration and parameters, efficient control of their operation under engineering and technological constraints, expanding their capabilities under the said constraints. There exists a broad spectrum of various ERS system types, each to address a specific application and social or economic objective, and each having a different set of features. Developing methods for systems analysis of specific system modifications is an important scientific and engineering problem. This paper discusses the management system of the E-Star ERS SS. It addresses the key task of the system operational management using the hierarchy analysis and decomposition of the complex process of simulating initial conditions of the Earth surface imaging. This method allows minimizing the time spent on preparations for and planning of imaging from space, as well as to evaluate the feasibility of an observational program and its efficiency from the standpoint of the use of ERS SS resources.
Текст научной статьи Выбор оптимальных вариантов маршрутов съемок для космической системы дистанционного зондирования Земли
КОВТУН В.С.

СТРОЧЕНКИН А.В.

ФРОЛОВ В.Н.
Космические снимки широко используются в самых разных областях человеческой деятельности — исследование природных ресурсов, мониторинг стихийных бедствий, строительные и проектно-изыскательские работы, городской и земельный кадастр, градостроительство, освоение недр, туризм и т. д. Современные гео-информационные технологии и создание карт различных масштабов также немыслимы без использования космических снимков [1].
РКК «Энергия» участвует в ОКР по созданию космической системы дистанционного зондирования Земли (КС ДЗЗ) E-Star для Арабской Республики Египет. Назначение космической системы E-Star — получение изображений заданных районов земной поверхности в оптическом диапазоне спектра с высоким разрешением в требуемых заказчиком форматах. На данном этапе в состав разрабатываемой КС ДЗЗ входит только один космический аппарат, что накладывает определенные ограничения на возможности съемки и выполнение заявок.
Постановка задачи и исходные данные. Для эффективного использования КС ДЗЗ необходимо повышение качества организации управления процессом.
Исходя из поставленных технических требований по созданию КС ДЗЗ, основными задачами системы управления являются:
-
1. Управление системой (в целом):
-
• сбор и обработка данных по состоянию и готовности к совместной работе наземных составных частей космической системы;
-
• разработка, доведение и контроль за выполнением планов совместной работы наземных составных частей космической системы;
-
• организация скоординированной работы наземных составных частей космической системы по целенаправленному выполнению поступающих от внешних пользователей заказов на получение цифровых изображений поверхности Земли;
-
• формирование и доведение докладов по результатам использования космической системы в вышестоящие инстанции заказчика по принятой форме.
-
2. Обеспечение эффективного взаимо-дейcтвия с внешними пользователями:
-
• получение и обработка заказов от внешних пользователей на предоставление цифровых изображений поверхности Земли;
-
• анализ реализуемости заказов по предъявленным внешними пользователями требованиям;
-
• формирование заказов на получение цифровых изображений требуемых районов поверхности Земли и на проведение обработки цифровых изображений;
-
• получение из наземного комплекса приема и обработки изображений (НКПОИ) предварительно обработанных изображений и формирование на их основе документов выходной информации;
-
• распределение и доведение выходной информации внешним пользователям.
-
3. Планирование программы наблюдений:
-
• комплексное автоматизированное планирование выполнения заказов с учетом метеоинформации о районах наблюдений и прогнозируемого разрешения;
-
• формирование программы наблюдений на основе принятых заказов.
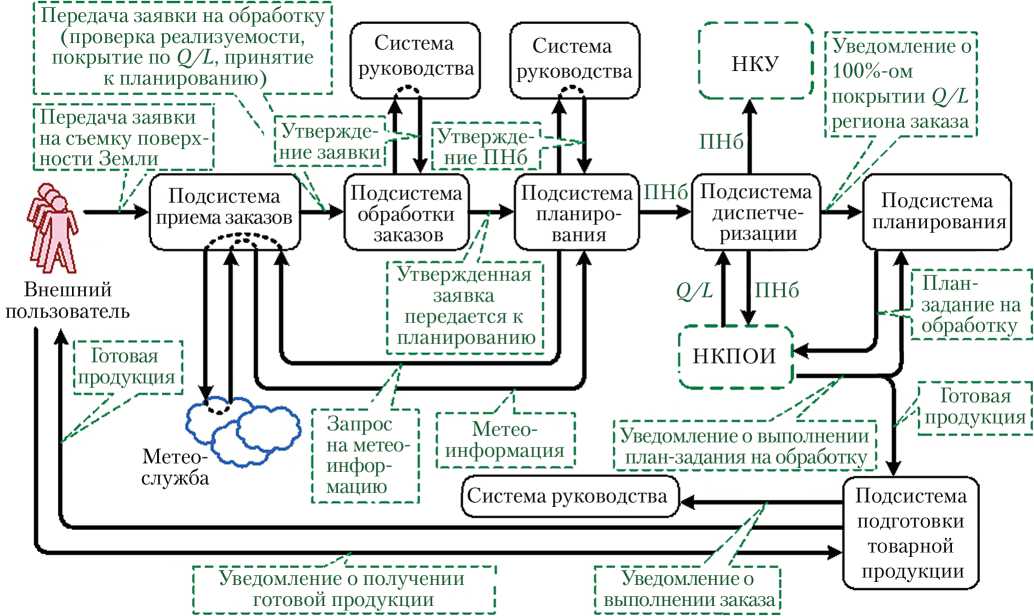
Рассматриваемая система управления относится к классу сложных технических систем [2] (рис. 1). Она характеризуется относительно устойчивой схемой (фиксацией) связей между элементами.
Подсистема обработки заказов служит главным инструментом в процессе моделирования начальных условий съемки поверхности Земли и предоставления оператору данных о сроках выполнения заказов на основе информации о:
-
• состоянии бортовых средств КА;
-
• баллистике КА;
-
• зонах видимости КА;
-
• погодных условиях в зонах съемки.
Процесс обработки заказа можно представить в виде схемы (рис. 2).
Процесс определения приоритета Pi для обработки заказа осуществляется с помощью шаблона приоритетов. Пример выбора приоритетов показан на рис. 3.
пнб
Подсистема ПНб Подсистема
ПНб
[НКПОИ *
63 \
Система руководства у
Метеослужба диспетчеризации
Подсистема планирования
Внешний пользователь
Подсистема приема заказов
[Утвержде-1 [ ние ПНб [ планирования
Система руководства
Подсистема подготовки товарной продукции
[ Метео-
[ информация ।
[ Уведомление о получении । готовой продукции
। Уведомление о
। выполнении заказа)
! Готовая [продукция I
[ Запрос
। наметео-
[ инфор-
। мацию
--^ । покрытии Q/L [региона заказа
[ Передача заявки । на съемку поверх-I ности Земли
। Утвержде-1 [ние заявки]
I Передача заявки на обработку [ (проверка реализуемости, । покрытие по Q/L, принятие к планированию)
) Готовая [ /3 продукция [ f„----? <-----
। Утвержденная заявка
। передается к । планированию
^ Подсистема “► обработки
. заказов
I Уведомление о выполнении [ [ план-задания на обработку [
I । Уведомление о нку I 1100%-ом
[ План-Jj задание на [ ~3 обработку [
Система руководства
Рис. 1. Функционирование системы управления космической системой дистанционного зондирования Земли Примечание. ПНб — программа наблюдений; Q/L — предварительно обработанные изображения; НКПОИ — наземный комплекс приема и обработки изображений; НКУ — наземный комплекс управления.

Рис. 2. Процесс обработки заказа
Примечание. ЦИ — целевая информация; БД — база данных; * — можно не выполнять, если в заказе оговорена актуальность (новизна) снимков.
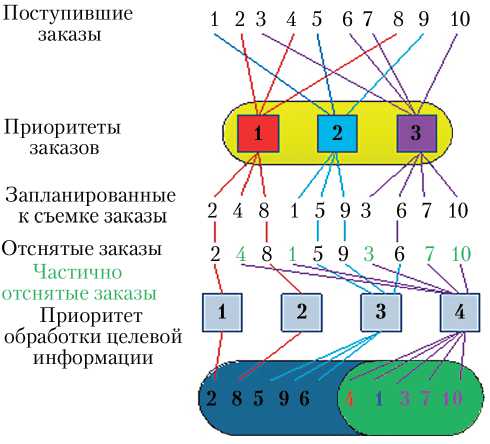
Рис. 3. Пример выбора приоритетов
Примечание. ■ — Очередь на обработку с учетом приоритета заказа; ■ — очередь на предварительную обработку
Существует три вида заказов. Заказ, имеющий приоритет Pz = 1, получает более высокий статус, чем заказ с приоритетом Pz = 3.
В то же время существует приоритет на обработку целевой информации Po = 1…4, что позволяет наиболее результативно выстраивать очередность подготовки товарной продукции и определять приоритеты частично отснятых заказов для последующего их включения в программу наблюдения (ПНб) на следующие сутки.
Процесс моделирования начальных условий съемки можно представить в виде схемы (рис. 4).
Процесс формирования ПНб отчасти схож с процессом моделирования начальных условий съемки поверхности Земли, и его конечным результатом является сформированная ПНб с результатом оценки ее эффективности. Оценку эффективности ПНб целесообразно рассчитывать по формуле
Е й
. ,5г.
' ' юо%,
где Sr — общая площадь отснятых полос заказов, вошедших в ПНб; Sz — общая площадь заказов, вошедших в ПНб.
Рассмотрим подробно процесс формирования ПНб, удовлетворяющий заданным начальным условиям моделирования.
Для формирования маршрутов съемки (входят в состав ПНб) заданного района поверхности Земли необходимо проанализировать следующие параметры:
-
• состояние системы оптико-электронного наблюдения (СОЭН);
-
• состояние бортового запоминающего устройства (БЗУ);
-
• состояние аккумуляторной батареи (АКБ);
-
• угол склонения Солнца (УС);
-
• баллистическую информацию (БИ) — выражается через коэффициент (чем ближе к центру маршрута съемки, тем выше коэффициент);
-
• метеоинформацию (МЕТЕО) — коэффициент облачности (прогноз облачно-сти/100).

Рис. 4. Моделирование начальных условий съемки
На рис. 5 представлена иерархия выбора оптимального варианта маршрута съемки заданного района поверхности Земли.
Оптимальный вариант
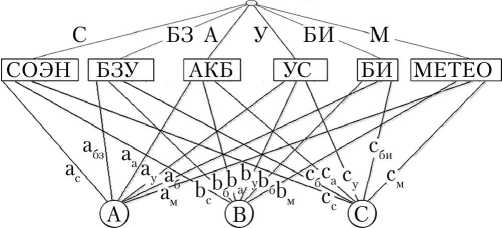
Рис. 5. Иерархия выбора оптимального варианта маршрута съемки: ac……aм; bc…..bм; сс……см — веса оценки параметров маршрутов съемки (A, B, C) по некоторому критерию; С, БЗ, А, У, БИ, М — вес критерия (важность) в общей оценке оптимальности маршрута съемки
Решение задачи. Для решения данной задачи применим метод анализа иерархий (МАИ) [3, 4].
Для этого, во-первых, необходимо нечетко сформулированной задаче придать строгую математическую форму. Этот существенный шаг является наиболее важным в любой задаче, в которой требуется представить жизненную ситуацию в терминах абстрактной математической структуры. Особенно важен он в рассматриваемой задаче, поскольку в ней процесс математической формулировки включает в себя ряд неявно видимых переходов.
Поэтому в данной задаче желательно четко определить основные этапы процесса ее формулирования и как можно подробней описать каждый этап.
На первом этапе решения данной задачи необходимо:
-
• оценить важность шести параметров (рис. 5);
-
• гарантировать количественную интерпретацию оценки важности по всем параметрам.
Пусть С 1, С 2,…, Сn — совокупность объектов (параметров). Количественные оценки важности пар объектов ( Сi , Сj ) представляются матрицей размера n × n :
A = ( aij ), ( i, j = 1, 2, …, n ).
Элементы aij определены по следующим правилам:
Правило 1. Если aij = α , то aji = 1/ α , α ≠ 0.
Правило 2. Если оценки важности таковы, что Сi имеет одинаковое с Cj значение, то aij = 1, aji = 1; в частности, aii = 1 для всех i .
Итак, матрица А имеет вид:
A
1 ... a
1/ a 1 n ... 1
После представления количественных оценок важности о паре параметров (Сi, Сj) в чис- ловом выражении через aij задача сводится к тому, чтобы n возможными действиями С1, С2, …, Сn поставить в соответствие зафиксированным оценкам важности множество числовых весов w1, w2, …, wn. Таким образом, отношения между числовыми весами wi и оценками aij выражаются в виде wi i = aij (для i, j = 1, 2, …, n). wj
В случае, когда значения aij основаны не на точных, а на приближенных суждениях, они будут отклоняться от «идеальных отношений» wi /wj.
Индекс согласованности суждений
I s = ( λ max – n )/( n – 1), (3) где λ max — наибольшее собственное число матрицы порядка n , рассматривается при анализе иерархий как показатель согласованности суждений. В идеальном случае λ max → n .
Оценки важности параметров базируются на результатах отработки программного обеспечения с использованием модели КА ДЗЗ, а их проверка осуществлялась на основе результатов моделирования начальных условий съемки, а также на результатах испытаний системы в целом.
Степень важности параметров, исходя из которых будем производить попарные сравнения, представлена в табл. 1.
Таблица 1
Степень важности параметров
|
Степень важности |
Определение |
Объяснение |
|
1 |
Одинаковая значимость |
Два фактора вносят одинаковый вклад в достижение цели |
|
3 |
Некоторое преобладание значимости одного фактора перед другим (слабая значимость, умеренное превосходство) |
Опыт и суждение дают легкое предпочтение одному фактору перед другим |
|
5 |
Существенная или сильная значимость (сильное превосходство) |
Опыт и суждение дают сильное предпочтение одному факту перед другим |
|
7 |
Очевидная или очень сильная значимость (очень сильное превосходство) |
Убедительное свидетельство в пользу одного действия (альтернативы) перед другим |
|
9 |
Абсолютная значимость |
Свидетельство в пользу предпочтения одного фактора другому в высшей степени убедительно |
|
2, 4, 6, 8 |
Промежуточные значения между соседними значениями шкалы |
Ситуация, когда необходимо компромиссное решение |
Использовав правила 1 и 2, получим матрицу попарных сравнений, представленную в табл. 2.
Таблица 2
Матрица попарных сравнений параметров
|
СОЭН |
БЗУ |
АКБ |
УС |
БИ |
МЕТЕО |
|
|
СОЭН |
1 |
5 |
3 |
1 |
3 |
5 |
|
БЗУ |
1/5 |
1 |
5 |
4 |
1/5 |
1 |
|
АКБ |
1/3 |
1/5 |
1 |
1/7 |
1/4 |
1/3 |
|
УС |
1 |
1/4 |
7 |
1 |
1 |
1/4 |
|
БИ |
1/3 |
5 |
4 |
1 |
1 |
2 |
|
МЕТЕО |
1/5 |
1 |
3 |
4 |
1/2 |
1 |
Следует иметь в виду, что данный метод относится к методам экспертных оценок, и веса, приведенные в табл. 2, являются средними значениями количественных суждений группы экспертов, которые они выразили, основываясь на определениях и объяснениях табл. 1. Основной целью группы экспертов на данном этапе было вынесение суждения об относительной важности этих объектов и гарантирование такого процесса получения суждений, который позволит количественно интерпретировать суждения по всем объектам. Необходимо нечетко сформулированной задаче придать строгую математическую форму. «Этот существенный (хотя и безобидный с виду) шаг является наиболее важным в любой задаче, в которой требуется представить жизненную ситуацию в терминах абстрактной математической структуры» [4].
Далее необходимо найти вектор приоритетов, X max , I s и отношение согласованности O s .
Для начала необходимо вычислить вектор приоритетов. Разделим элементы каждого столбца на сумму элементов этого столбца (т. е. нормализуем столбец). Затем сложим элементы каждой полученной строки и разделим на число элементов строки (процесс усреднения по нормализованному столбцу).
Вектор-столбец — (1,978; 0,857; 0,257; 0,935; 1,152; 0,819).
Вектор-столбец после деления на размерность столбцов позволяет получить вектор-столбец приоритетов (0,33; 0,143; 0,043; 0,156; 0,192; 0,136).
Вычислим X max, для чего матрицу A умножим на вектор приоритетов (0,33; 0,143; 0,043; 0,156; 0,192; 0,136). Компоненты получившегося вектора делим на вектор приоритетов и получаем (7,836 + 8,545 + 6,907 + 6,724 + 8,422 + 8,779)/6 = X max = 7,8.
Отсюда Is = ( X m a x - n )/( n - 1) = 0,3.
Отношение согласованности Оs = Is / SI = = 0,242, где SI — случайный индекс, т. е. индекс согласованности, сгенерированной случайным образом по шкале от 1 до 9 обратно-симметричной матрицы с соответствующими обратными величинами элементов.
Для матрицы 6 x 6 случайный индекс S I , сгенерированный в Национальной лаборатории Оук-Ридж, равен 1,24 [5].
Сравнение параметров ПНб относительно шести характеристик представлено в табл. 3.
Нормализовав матрицу (табл. 3), получим матрицу, приведенную в табл. 4.
Таблица 3
Сравнение параметров ПНб относительно шести характеристик
|
СОЭН |
БЗУ |
АКБ |
УС |
БИ |
МЕТЕО |
|||||||||||||
|
A |
B |
C |
A |
B |
C |
A |
B |
C |
A |
B |
C |
A |
B |
C |
A |
B |
C |
|
|
A |
1 |
80/70 |
80/60 |
1 |
40/58 |
40/75 |
1 |
90/50 |
90/35 |
1 |
10/90 |
10/145 |
1 |
1/10 |
1/3 |
1 |
7/6 |
7/7 |
|
B |
70/80 |
1 |
70/60 |
58/40 |
1 |
58/75 |
50/90 |
1 |
50/35 |
90/10 |
1 |
90/145 |
10/1 |
1 |
10/3 |
6/7 |
1 |
6/7 |
|
C |
60/80 |
60/70 |
1 |
75/40 |
75/58 |
1 |
35/90 |
35/50 |
1 |
145/10 |
145/90 |
1 |
3/1 |
3/10 |
1 |
7/7 |
7/6 |
1 |
|
X max = 3, I s = 0, Оs = 0 |
X max= 3,168, Is = 0,084, Оs = 0,145 |
X max= 3,001, Is = 0,0005, Оs = 0,0009 |
X = 3,021, Is = 0,01, Оs = 0,017 |
X max= 3,001, Is = 0,0005, Оs = 0,0009 |
X max= 3,003, Is = 0,0015, Оs = 0,0025 |
|||||||||||||
Нормализованная матрица
Таблица 4
|
СОЭН |
БЗУ |
АКБ |
УС |
БИ |
МЕТЕО |
|
|
A |
0,380 |
0,231 |
0,514 |
0,041 |
0,071 |
0,350 |
|
B |
0,333 |
0,335 |
0,286 |
0,367 |
0,714 |
0,300 |
|
C |
0,287 |
0,434 |
0,200 |
0,592 |
0,215 |
0,350 |
Общую оценку маршрутов съемки можно представить в виде матричного произведения:
0,380( а с)
0,333( b c)
0,287( c с)
0,231( а бз)
0,335( b бз)
0,434( c бз )
0,514( а а)
0,286( b а)
0,200( c а)
0,041( а у) 0,367( b у)
0,592( c у)
0,071( а б)
0,714( b б)
0,215( c б)
0,350( а м)
0,300( b м)
0,350( c м)
0,33(С) 0,143(БЗ) 0,043(А) 0,156(У) 0,192(БИ) 0,136(М)
Общая оценка маршрутов съемки:
-
• маршрут съемки А = acC + a бзБЗ + а аА + + а уУ + а бБИ + а мМ = 0,24;
-
• маршрут съемки B = b cC + b бзБЗ + b аА + + b уУ + b бБИ + b мМ = 0,41;
-
• маршрут съемки С = сcC + сбзБЗ + саА + + суУ + сбБИ + с мМ = 0,35.
На основе приведенных расчетов программа выберет маршрут съемки B , посчитав его наиболее оптимальным для включения его в ПНб.
Подготовленная таким образом ПНб передается в ЦУП, где обрабатывается, уточняется и подвергается детальной проверке на возможность ее реализации с помощью бортовых систем КА ДЗЗ. Также ПНб передается в НКПОИ для формирования сеансов приема целевой информации с КА.
На основе подготовленной программы наблюдений ЦУП формирует соответствующие массивы полетного задания (МПЗ) для передачи в ближайшем сеансе связи после утверждения программы наблюдения.
После успешного выполнения МПЗ подсистемы приема и обработки изображений в ходе сеанса связи с КА принимают и обрабатывают целевую информацию от КА ДЗЗ и на ее основе формируют предварительные цифровые изображения поверхности Земли. Далее их передают в подсистему диспетчеризации для определения уровня покрытия заказа полученными снимками.
После получения уведомления о полном покрытии заказа на предоставление цифровых изображений поверхности Земли подсистема планирования формирует план-задание на обработку и пересылает его в НКПОИ.
НКПОИ на основе план-задания проводит окончательную обработку результатов съемок, полученных в ходе выполнения программы наблюдений, и передает получившееся изображение в подсистему подготовки товарной продукции.
Выводы
Учитывая большое разнообразие использования КС ДЗЗ, полный состав задач ДЗЗ велик по номенклатуре и содержит весьма разнородные требования к видам и характеристикам космических данных. Это требует четкой организации процесса управления.
Рассмотренный подход к решению проблем управления наиболее универсален, гибок, эффективен и экономически целесообразен, так как уже на этапе предварительной обработки заказов на предоставление цифровых снимков поверхности Земли дает возможность оценить сроки выполнения заказов, эффективность использования КС ДЗЗ и достичь максимальной производительности КС ДЗЗ, что немаловажно для коммерческого (и не только) подхода к использованию ресурсов КС. Подход использован при создании КС ДЗЗ E-Star .
Список литературы Выбор оптимальных вариантов маршрутов съемок для космической системы дистанционного зондирования Земли
- Бакланов А.И. Системы наблюдения и мониторинга. М.: БИНОМ, 2009. 234 с.
- Космические информационные системы и приборы оптического диапазона для дистанционного зондирования Земли//Под ред. Урличича Ю.М. М.: ИД «Медиа Паблишер», 2012. 124 с.
- Ковтун В.С. Методология вариабельного управления расходом топлива реактивных двигателей космических аппаратов//Известия РАН. Энергетика. 2012. № 2. С. 31-42.
- Саати Т.Л. Принятие решений при зависимостях и обратных связях. Аналитические сети. М.: Издательство ЛКИ, 2008. 360 с.
- Охтилев М.Ю. Соколов Б.В., Юсупов Р.М. Интеллектуальные технологии мониторинга состояния и управления структурной динамикой сложных технических объектов. М.: Наука, 2006. 410 с.
