Выбор порога чувствительности для систем диагностики

Автор: Соловьев Денис Алексеевич, Семенов Андрей Артемьевич, Щукин Николай Васильевич, Гриненко Владимир Антонович, Груздов Федор Владимирович, Милюков Федор Владимирович
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 1, 2012 года.
Бесплатный доступ
При работе любой системы диагностики возникают ошибки первого и второго рода. Ошибки первого рода и ошибки второго рода в математической статистике - это ключевые понятия задач проверки статистических гипотез. Тем не менее данные понятия часто используются и в других областях, когда речь идет о принятии «бинарного» решения (да/нет) на основе некоего критерия (теста, проверки, измерения), который с некоторой вероятностью может давать ложный результат. В статистических тестах обычно приходится идти на компромисс между приемлемым уровнем ошибок первого и второго рода. Зачастую для принятия решения используется пороговое значение, которое может варьироваться с целью сделать тест более строгим или, наоборот, более мягким. Возможны разные подходы к выбору порога чувствительности. В этой статье будет описан экономический подход, основанный на выборе порогового значения таким образом, чтобы минимизировать средний ущерб при эксплуатации системы.
Система диагностики, порог чувствительности, уровень значимости
Короткий адрес: https://sciup.org/14967081
IDR: 14967081
Текст научной статьи Выбор порога чувствительности для систем диагностики
По мере накопления и расширения знаний об окружающем мире все актуальней становятся задачи диагностики в различных областях человеческой деятельности: техника, медицина, экономика и д.р. По своей сути диагностика – это процесс установления диагноза или распознавания проблемы. В процессе диагностики проводится сравнение текущего состояния объекта исследования с его моделью. Если совпадение оказывается неудовлетворительным, выдается предупре- ждающее сообщение, инициирующее предусмотренные действия. Своевременная диагностика нежелательных событий позволяет минимизировать затраты, связанные с лавинообразным накоплением нарушений в сложных системах. Безусловно, к сложным системам относятся и атомные станции, для которых эффективным признается использование диагностических средств, позволяющих быстро обнаруживать симптомы отказов и ухудшение рабочих характеристик, что непосредственным образом связано с повышением безопасности, надежности и экономической эффективности эксплуатации АЭС и ядерной энергетики в целом.
1 – Национальный исследовательский ядерный университет «МИФИ».
внутриреакторного контроля и своевременного выявление отказов оборудования и ошибок в исходных данных программ сопровождения эксплуатации ЯЭУ [1, 2, 3].
Однако, как это часто бывает, если программа не является достоянием сообщества людей, которое непрерывно бы поддерживало и совершенствовало ее работоспособность, то программа устаревает и через какое-то время становится неработоспособной. К сожалению, такая судьба постигла и ПС непрерывной диагностики ECRAN.
Тем не менее реализованные в программе алгоритмы не были утеряны, а возможность живого контакта с авторами и разработчиками позволила восстановить заложенный в программу научный потенциал. Использование современных кодов, методов и подходов к разработке программного обеспечения позволило вдохнуть в программу новую жизнь, сделало ее код работоспособным под современными операционными системами на современной компьютерной технике. Проведенные усовершенствования диагностических алгоритмов позволили повысить их точность и скорость работы.
Таким образом, была создана расчетно-измерительная диагностическая система ECRAN 3D [4 – 8], основу которой составляют аттестованные программные средства сопровождения эксплуатации (POLARIS [9], КОНТУР-М [10]), а также апробированные методы обработки экспериментально-расчетной информации о состоянии активной зоны и базы данных РБМК.
Однако при работе любой системы диагностики могут возникать ошибки первого и второго рода. Ошибки первого рода и ошибки второго рода в математической статистике – это ключевые понятия задач проверки статистических гипотез. Тем не менее данные понятия часто используются и в других областях, когда речь идет о принятии «бинарного» решения (да/нет) на основе некоего критерия (теста, проверки, измерения), который с некоторой вероятностью может давать ложный результат.
Пусть дана выборка X = (X1,...,Xn)T из неизвестного совместного распределения PX , и поставлена бинарная задача проверки статистических гипотез: H0 ,
H1 , где H0 – нулевая гипотеза, а H1 – альтернативная гипотеза. Предположим, что задан статистический критерий:
f : R n → {H 0 , H 1 } , сопоставляющий каждой реализации выборки X = x одну из имеющихся гипотез. Тогда возможны следующие четыре ситуации.
-
1 Распределение PX выборки X соответствует гипотезе H0 , и она точно определена статистическим критерием, то есть f(x) = H0 .
-
2 Распределение PX выборки X соответствует гипотезе H0 , но она неверно отвергнута статистическим критерием, то есть f(x) = H1 .
-
3 Распределение PX выборки X соответствует гипотезе H1 , и она точно определена статистическим критерием, то есть f(x) = H1 .
-
4 Распределение PX выборки X соответствует гипотезе H1 , но она неверно отвергнута статистическим критерием, то есть f(x) = H0 .
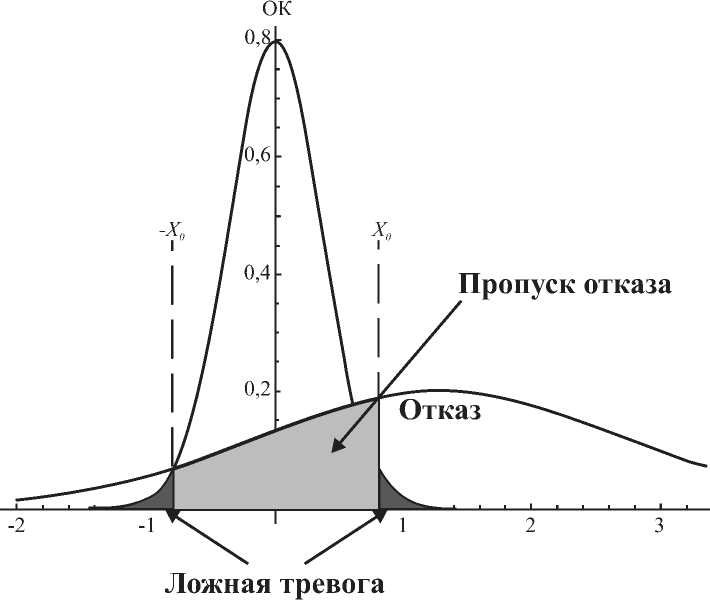
Во втором и четвертом случае говорят, что произошла статистическая ошибка, и ее называют ошибкой первого и второго рода соответственно. Пропуск отказа при его фактическом наличии назовем ошибкой первого рода. Регистрацию отказа при его отсутствии назовем ошибкой второго рода.
Как видно из вышеприведенного определения, ошибки первого и второго рода являются взаимно симметричными, то есть, если поменять местами гипотезы H0 и H1, то ошибки первого рода превратятся в ошибки второго рода и наоборот. Тем не менее в большинстве практических ситуаций путаницы не происходит, поскольку принято считать, что нулевая гипотеза H0 соответствует состоянию «по умолчанию» (естественному, наиболее ожидаемому положению вещей) – например, что исследуемый объект находится в работоспособном состоянии. Соответственно альтернативная гипотеза H1 обозначает противоположную ситуацию, которая обычно трактуется как менее вероятная, неординарная, требующая какой-либо реакции. С учетом этого ошибку первого рода часто называют ложной тревогой, ложным срабатыванием или ложноположительным срабатыванием – например, анализ положения регулирующего органа показал его обрыв, хотя на самом деле обрыва не произошло. Из-за возможности ложных срабатываний не удается полностью автоматизировать борьбу со многими видами ошибок. Как правило, вероятность ложного срабатывания взаимосвязана с вероятностью пропуска события (ошибки второго рода). То есть, чем более чувствительна система, тем больше опасных событий она детектирует и, следовательно, предотвращает. Но при повышении чувствительности неизбежно вырастает и вероятность ложных срабатываний. Поэтому чересчур чувствительно (параноидально) настроенная система диагностики может выродиться в свою противоположность и привести к тому, что побочный вред от нее будет превышать пользу. Соответственно ошибку второго рода иногда называют пропуском события или ложноотрицательным срабатыванием – объект не работоспособен, но анализ состояния этого не показал. Степень чувствительности системы защиты должна представлять собой компромисс между вероятностью ошибок первого и второго рода. Где именно находится точка баланса, зависит от оценки рисков обоих видов ошибок [11].
Экономический подход к принятию решения
Во время работы системы диагностики обычно приходится идти на компромисс между приемлемым уровнем ошибок первого и второго рода. Зачастую для принятия решения используется пороговое значение, которое может варьироваться с целью сделать тест более строгим или, наоборот, более мягким. Этим пороговым значением является уровень наличия отказа, которым задаются при проверке статистических гипотез.
Возможны разные подходы к оценке рисков обоих видов, а соответственно и к выбору уровня наличия отказа. Опишем один из них – экономический. Для этого выберем порог принятия решения так, чтобы минимизировать средний ущерб при эксплуатации системы.
Теперь рассмотрим модель работы диагностической системы. Диагностическая система работает, производя
периодические проверки с заданным шагом по времени dt . Если выходной сигнал для данного типа отказа превышает заданный порог, происходит принятие решения о наличии отказа. Также возможна альтернатива – принятие решения после N превышений порога подряд. После этого происходит проверка наличия отказа дополнительными средствами. При наличии отказа он устраняется мгновенно, с точки зрения системы диагностики.
Примем следующую модель шумов при нормальной эксплуатации системы:
- xL
Pok (x) = 777т e 2,
UN 2 Л причем отсутствуют корреляции по времени.
Модель отказов такова – отказы случаются с заданной равномерной плотностью по времени Pf . Плотность распределения в условиях наличия отказа тоже нормальна, но с другим законом:
P,(x)=
Of al V2 ^
(x-x 0 )2
–
e 2 ^
т.е. при появлении отказа возникает смещение и изменяется дисперсия сигнала оценки ошибки. В этих данных также отсутствуют корреляции.
Модель ущерба
Таблица 1. Ущерб в различных ситуациях
|
Величина |
Отказ есть |
Отказ зарегистрирован |
|
0 |
0 |
0 |
|
check |
0 |
1 |
|
C fail + C check + Crepare |
1 |
0 |
|
f(t) ·Cfail + Ccheck + Crepare |
1 |
1 |
В таблице 1:
-
♦ C check — стоимость проведения проверки на наличие отказа;
-
♦ C repare — стоимость ремонта;
-
♦ C fail — асимптотическая стоимость ремонта, вызванная несвоевременным обнаружением отказа;
-
♦ f(t) характеризует нарастание последствий при работе без принятия мер по ремонту, она равна нулю при t = 0 и равна 1 при t → ∞ .
В дальнейшем будем пренебрегать Ccheck + Crepare по сравнению с членом C fail .
Работа диагностической системы имеет смысл, если она позволяет обнаружить отказ на начальных этапах нарастания стоимости последствий. Чтобы упростить рассмотрение примем, что темп нарастания последствий невелик по сравнению с временным окном усреднения по времени в алгоритме поиска отказа. Тогда можно заменить: f(t) × Cfail → Cfail.
Рис. 1. Оценка вероятностей ошибок первого и второго рода
Посчитаем ущерб как функцию порога принятия решения о наличии отказа в предположении, что отказы – редкое явление.
Для дальнейших выкладок нам потребуется соотношение:
| 12
erfc ⎜ σ⎟ ∞
V V 1 I и, ----т=— = e V V dx .
2 V 2
Для упрощения примем экспоненциальную модель нарастания стоимости последствий отказа:
f(t) = 1 – e –λt.
Пусть вероятность нахождения в состоянии отказа равна Pf, а уровень тре- вог ξ. Тогда компонента стоимости С2, связанная с ложными тревогами, с учетом двухсторонних ограничений будет иметь вид:
.
Обозначим вероятности ошибки первого рода P1 , а вероятность ошибки второго рода P2 :

x о + ^ fail ⎠
+ erfc
$ - x 0
fail
P i =
2V2
P 2 = 1 – P 1 .


Тогда средняя стоимость последствий отказа С1 будет иметь вид:
( - 1 + e dt ) P
,
C1 Cffed* -P1 )(1 - P1)
а средняя стоимость С2 , связанная с ложными тревогами:
TO
C2 = Cfaii • PflS (1 - e-lidt )• P1i I • i=1
Таким образом, изменяя ξ необходимо минимизировать функционал C1 + C2 , что легко осуществляется численными алгоритмами минимизации.
Заключение
В статье был изложен экономический подход, позволяющий выбирать порог чувствительности диагностических систем таким образом, чтобы минимизировать средний экономический ущерб при эксплуатации системы. Предложенный подход был применен для выбора порога чувствительности в системе ECRAN 3D, предназначенной для диагностики и мониторинга состояния активных зон и баз данных реакторов РБМК-1000. Проведенная расчетно-экспериментальная верификация созданного программного средства показала, что обеспечен требуемый уровень функционально-технических показателей системы диагностики
Список литературы Выбор порога чувствительности для систем диагностики
- Schukin N.V., Filatov A.V., Chernov E.V., Romanin S.D., Semenov A.A. Development of mathematical models for NPP core analysis during operation./International conference on the physics of reactors PHYSOR 96. -Vol. 4. -k-78-k-86. -September 16 -20, 1996
- Филатов А.В., Щукин Н.В., Семенов А.А., Романин С.Д. Система контроля загрузки активной зоны методами расчетно-экспериментальной диагностики./Сборник трудов научной сессии МИФИ-1998. -Том. 4. -С. 19 -21.
- Щукин Н.В., Филатов А.В., Семенов А.А., Романин С.Д. Ecran -система контроля загрузки активной зоны ядерного реактора./Сборник трудов «Научные исследования в области ядерной энергетики в технических вузах России». -МЭИ, 4:36-38, 1999.
- Милюков Ф.В., Щукин Н.В., Семенов А.А., Соловьев Д.А., Черезов А.Л. Программа взаимокорреляционного анализа параметров ядерной безопасности./Аннотации докладов. -Научная сессия НИЯУ МИФИ-2011. -С. 62.
- Соловьев Д.А, Семенов А.А., Щукин Н.В. Система пространственно-временной диагностики ECRAN 3D./Аннотации докладов. -Научная сессия НИЯУ МИФИ-2012. -С. 60
- Груздов Ф.В., Соловьев Д.А. Построение эмпирической модели определения расхода теплоносителя через канал РБМК./Аннотации докладов. -Научная сессия НИЯУ МИФИ-2012. -С. 65.
- Глазков О.В., Соловьев Д.А. Выявление отказов в положении ОР СУЗ в РБМК./Аннотации докладов. -Научная сессия НИЯУ МИФИ-2012. -С. 70.
- Милюков Ф.В., Соловьев Д.А. Выявление неверных перегрузок в реакторе РБМК./Аннотации докладов. -Научная сессия НИЯУ МИФИ-2012. -С. 72.
- Лысов Д.А., Погосбекян Л.Р. Программа Polaris, версия 4.2.1: Аттестационный паспорт программного средства. Регистрационный номер ПС в ЦОЭП при РНЦ КИ №632 от 14.09.2007. Регистрационный номер паспорта аттестации №231 от 18.09.2007, ВНИИАЭС, Москва.
- Апресов А.А. Модернизированная версия программы «КОНТУР-М» для совместного нейтронно-физического и теплогидравлического расчета реакторов типа РБМК. Отчет ИАЭ, инв. № 33/494484, 1984.
- http://ru.wikipedia.org/wiki/Ошибка_первого_рода>
