Выбор режима работы шагового двигателя в станках числового программного управления

Автор: Е. А. Лыкова
Журнал: Современные инновации, системы и технологии.
Рубрика: Машиностроение, металлургия и материаловедение
Статья в выпуске: 4 (3), 2024 года.
Бесплатный доступ
В статье описан принцип работы шагового двигателя, определены основные элементы. Применение шагового двигателя в станках числового программного управления позволяет добиться большей точности. Альтернативным вариантом является использование сервомотора, однако его установка требует более сложной схемы управления. Более того, стоимость сервомоторов значительно превышает стоимость шаговых двигателей, что является еще одним преимуществом шаговых двигателей. Теоретически изучен вопрос о выборе вида подключения обмоток двигателя. Обоснован выбор биполярного шагового двигателя для решения поставленной задачи. На практическом применении был выбран режим работы для управления рабочего органа, двигающегося вверх и вниз. Было проведено исследование, включающее в себя сбор данных, по результатам которого выяснен наиболее оптимальный режимом работы - полушаговый. При нем были достигнуты удовлетворяющие результаты плавности передвижения рабочего органа, использовано минимальное количество элементов. Также соблюден необходимый критерий точности, который позволяет использовать шаговый двигатель, работающий в полушаговом режиме, в станках числового программного управления. По сравнению с микрошаговым режимом полушаговый режим оказался оптимальным по критерию точности и сложности реализации.
Шаговые двигатели, станки числового программного управления, полушаговый режим работы, полношаговый режим работы, микрошаговый режим работы, биполярное подключение обмоток двигателя, униполярное подключение обмоток двигателя
Короткий адрес: https://sciup.org/14131301
IDR: 14131301 | DOI: 10.47813/2782-2818-2024-4-3-0401-0407
Текст статьи Выбор режима работы шагового двигателя в станках числового программного управления
DOI:
В данной статье рассматривается внедрение шагового двигателя, устройства, состоящего из статора и ротора, который преобразует электрическую энергию в механическую. Шаговый двигатель широко применяется в машиностроении за счет своей достигаемой точности, обусловленной его дискретным угловым вращением. В настоящее время шаговые двигатели получили свое признание за высокую надежность и продолжительный срок использования [1-3]. Более того, погрешность перемещения шагового двигателя не накапливается от шага к шагу, что дает преимущества в его использовании по сравнению с сервоприводами, которые являются альтернативным решением при построении станков числового программного управления. Основной целью является внедрение шагового двигателя для управления рабочего органа, двигающегося вверх и вниз, что может быть применено в станках числового программного управления.
МАТЕРИАЛЫ И МЕТОДЫ
Шаговый двигатель – это электродвигатель, который вращается пошагово на определенный угол. Чем меньше угол, тем больше скорость можно получить. Основными компонентами шагового двигателя являются статор и ротор [4]. Статор представляет собой кольцо с несколькими парами отдельных катушек, расположенных на противоположных полюсах. Ротор, в свою очередь, является двухполосным магнитом, который располагается на валу двигателя. Вращающейся частью шагового двигателя является ротор, в то время как статор – неподвижной. При подаче питания на пару катушек статора возникает электромагнитное поле, которое притягивает ближайший полюс ротора. Тем самым, возникает пошаговое вращение. Пример количества положений шагового двигателя при двух парах катушек, расположенных на статоре, приведен на рисунке 1.
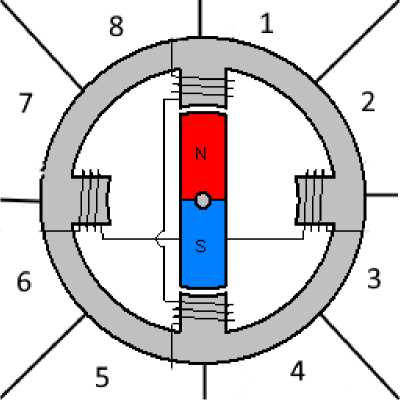
Рисунок 1. Положения шагового двигателя.
Figure 1. Stepper motor positions.
Существует несколько видов подключения обмоток двигателя [5]:
-
• биполярное – используются две обмотки при вращении ротора,
-
• униполярное – имеется отвод от половины каждой обмотки, что делает
возможным подключить половины обмоток в прямой и обратной полярности, тем самым упрощая коммутацию [6].
В практических целях был изначально выбран биполярный вид. При таком подключении достигается наибольшая эффективность (задействована сразу вся обмотка), обеспечивается большая производительность на средних скоростях, улучшаются показатели выходного крутящегося момента. В дополнение к этому, необходимо учесть, что на рынке большее количество драйверов, созданных для биполярного вида подключения обмоток, что упрощает выбор замены при выходе из строя оборудования.
В ходе практического внедрения шагового двигателя был произведен сбор данных, при котором изучалось поведение рабочего органа. В качестве практической задачи было выбрано достижение 24 положений шаговым двигателем за один полный оборот. Количество фаз шагового двигателя определяется по числу пар отдельных катушек (обмоток), расположенных на статоре [7].
Шаговый двигатель может работать в режимах [8]:
-
• полношаговом – осуществляется поворот за 1 такт на 1 шаг,
-
• полушаговом – осуществляется поворот за 1 такт на 0,5 шага,
-
• микрошаговом – осуществляется поворот за 1 такт на 0,25 и меньше шагов.
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
При полношаговом режиме работы потребовалось 24 пары отдельных катушек (обмоток). Заметим, что такой режим прост в управлении и позволяет достигнуть высокого крутящего момента при низких скоростях, однако проигрывает в точности и плавности перемещения.
При полушаговом режиме потребовалось 6 пар отдельных катушек (обмоток). Были достигнуты средние результаты по измерению крутящего момента при низких скоростях, требует более сложных методов управления, тем не менее, плавность и точность перемещения заметно возросла.
При микрошаговом (с шагом 0,25) – 4 пары отдельных катушек (обмоток). Был достигнут самый низкий крутящий момент при низких скоростях относительно рассмотренных режимов. Требует еще более совершенных методов управления, тем не менее, является наиболее точным и плавным по перемещению.
Таким образом, оптимальным оказался полушаговый режим работы, так как при нем было задействовано минимальное количество отдельных катушек (обмоток), на которые попеременно подавалось напряжение (в четыре раза меньше, чем при полношаговом режиме). Вместе с тем достигается удовлетворяющая точность и плавность перемещения. В довершение всего, полученные результаты подтвердились с данными о наиболее распространёнными режимами работы шаговых двигателей, применяемых в станках числового программного управления.
Полношаговый режим работы не удовлетворяет критерию точности. К преимуществам полношагового режима работы можно отнести простоту реализации. Тем не менее, при данном режиме работы рабочий орган двигался неравномерно, что делает невозможным для использования в станках числового программного управления.
Микрошаговый режим работы не удовлетворяет по сложности реализации. При данном режиме работы было достигнуто наименьшее количество используемых пар катушек (обмоток). Более того, точность значительно возросла. Следовательно, рабочий орган перемещается еще более плавно по сравнению с другими рассмотренными режимами работы. Такой режим работы может быть применен в станках числового программного управления, где требуется очень высокая точности и нет необходимости ограничиваться в количестве используемых обмоток.
ЗАКЛЮЧЕНИЕ
Таким образом, возможно использование шагового двигателя для управления рабочего органа вверх и вниз. Был выбран полушаговый режим работы, при котором используется 6 пар отдельных катушек (обмоток). При данном режиме работы критерий плавности и точности перемещения является удовлетворительным. Более того, было выбрано оптимальное число отдельных катушек (обмоток). Сравнивая шаговый двигатель с сервоприводом, можно прийти к следующим преимуществам использования шагового двигателя:
-
• точность перемещения рабочего органа;
-
• переносимость механических перегрузок;
-
• нет необходимости в регулярном техническом обслуживании;
-
• невысокая стоимость.
Таким образом, биполярный вид шагового двигателя с полушаговым режимом работы может применяться в станках числового программного управления. Применение шаговых двигателей дает еще один вариант для построения станков числового программного управления.
