Выделение гироскопических инерционных сил из центробежных и кориолисовых инерционных сил

Автор: Телегин Александр Иванович
Рубрика: Управление в технических системах
Статья в выпуске: 1 т.24, 2024 года.
Бесплатный доступ
Целью исследования является выделение в уравнениях динамики механических систем обобщенных гироскопических инерционных сил, состоящих из части центробежных и кориолисовых инерционных сил, с указанием тел, движения которых формируют эти силы. Методы исследования относятся к механике систем тел, системному анализу и робототехнике. Результаты исследования позволяют выписывать общие формулы вычисления обобщенных центробежных, кориолисовых и гироскопических инерционных сил через частные производные по обобщенным координатам от элементов матрицы инерционных коэффициентов в выражении кинетической энергии произвольной механической системы. В процессе анализа этих формул для систем тел со структурой открытого дерева, например, орбитальных станций с манипуляторами на борту или шагающих аппаратов в одноопорной фазе ходьбы, выделены тела, движения которых влияют на возникновение перечисленных инерционных сил. Для манипуляционных систем роботов приведены примеры уравнений динамики, в которых выделены все возможные инерционные силы и указаны тела, их формирующие.
Системы тел, уравнения динамики, инерционные силы (центробежные, кориолисовы, гироскопические), манипуляторы
Короткий адрес: https://sciup.org/147242624
IDR: 147242624 | УДК: 681.5 | DOI: 10.14529/ctcr240106
Separation of gyroscopic inertial forces from centrifugal and coriolis inertial forces
The purpose of the study is to identify in the equations of dynamics of mechanical systems generalized gyroscopic inertial forces, consisting of a part of centrifugal and Coriolis inertial forces, indicating the bodies whose movements form these forces. The methods of research refer to mechanics of body systems, systems analysis and robotics. The results of the study allow us to write out general formulas for calculating generalized centrifugal, Coriolis and gyroscopic inertial forces through partial derivatives on generalized coordinates from elements of the matrix of inertial coefficients in the expression of kinetic energy of arbitrary mechanical system. In the process of analyzing these formulas for systems of bodies with an open tree structure, such as orbital stations with manipulators on board or walking vehicles in the single-supported walking phase, the bodies whose movements affect the occurrence of the listed inertial forces are highlighted. For robot manipulation systems we present examples of the equations of dynamics, in which all possible inertial forces are highlighted and the bodies that form them are indicated.
Текст научной статьи Выделение гироскопических инерционных сил из центробежных и кориолисовых инерционных сил
Для управления механическими системами (МС), например, манипуляционными системами промышленных роботов, широко используются уравнения динамики (УД) [1, 2]. Эти УД чаще всего выводятся по формализму Лагранжа [3–5], реже по формализму Аппеля и другим формализмам [6]. Для использования формализма Лагранжа необходимо знать выражение Лагранжиана, т. е. разности кинетической и потенциальной энергии. Выражением кинетической энергии МС является квадратичная форма обобщенных скоростей, коэффициентами которой являются элементы матрицы инерционных коэффициентов (МИК). Вывод элементов МИК для МС с тремя и более подвижными телами является сложной и громоздкой задачей. Не менее сложно применять к кинетической энергии формализм Лагранжа. Поэтому в учебной и научной литературе чаще всего выводятся УД плоских двухзвенников [7–10]. Рассматриваются также конкретные МС [11–13] и их классы [14].
Несколько новых методов выписывания элементов МИК изложено в книге [15]. Там же по формализму Лагранжа выведены общие формулы для автоматического выписывания обобщенных инерционных сил (ОИС). В конкретных примерах, демонстрирующих эффективность предложенного формализма выписывания УД, из ОИС выделены гироскопические инерционные силы (ГИС). Но общие формулы отдельного выписывания центробежных инерционных сил (ЦИС), кориолисовых инерционных сил (КИС) и выделения среди них ГИС в книге [15] отсутствуют. В настоящей статье этот пробел устранен.
Постановка задачи. В статье ставится задача вывода общих формул для выписывания ОИС в виде суммы ЦИС, КИС и ГИС для произвольных механических систем с голономными стационарными связями и их распространения на два класса систем тел (СТ), на древовидные СТ с открытыми ветвями (ДСТОВ) и на СТ с одной открытой ветвью (СТОВ). В структуре формул для ДСТОВ и СТОВ должны быть явно выделены номера тел, движения которых порождают указанные ОИС. Эффективность предлагаемых формул можно продемонстрировать на примерах ручного выписывания ЦИС, КИС и ГИС ДСТОВ для типовых манипуляторов промышленных роботов.
1. Формализмы выписывания ОИС
Введем обозначения:
q i - i-я обобщенная скорость (ОС);
H ji - элементы симметричной (H ij = H j{ ) положительно определенной матрицы инерционных коэффициентов (МИК);
q1, q2,...,qN — обобщенные координаты (ОК);
Hjik = 9Hji/ dqk, j > i.
Утверждение 1 . УД механической системы с голономными стационарными связями представимы в виде
S j=i Hijqj + Hiiqi + ^=1+1 Hjiqj + qd + q O i + hg i = Q gi , (1)
где i = 1,2, ...,N; Qg i - i-я обобщенная движущая сила, включающая силу тяжести;
hci = 0,5Hiiiq?+^.i+iHjijqj(2)
- ЦИС(1) - центробежная инерционная сила, действующая на l-е тело;
hOi = 0,5qi I%i Hujqj + Ij^ qj I".i Hjikqk(3)
- КИС(1) - кориолисова инерционная сила, действующая на l-е тело;
дТ/ dqi = 0,5 I^=i Hjjiqj + Ik 2 qk Ijzi Hkjiqj;(4)
hgi = ТЙ Hijqj + 0,5Huqi - дТ/ dqi(5)
– ГИС(i) – гироскопическая инерционная сила, действующая на i -е тело.
В формуле (3) запись N/l в верхнем пределе суммирования указывает на то, что индекс суммирования не принимает значение l. Аналогично трактуется запись N/j.
Доказательство . Кинетическая энергия механической системы (МС) с голономными стационарными связями представима в виде
Т = 0,5 I^ Hjjqj + I^ qk I^Zi Hkjqj, где в общем случае элементы МИК зависят от всех ОК. Из выражения Т получим дТ/ dqi = Ij.i Hijqj + Huqi + I^. Hnq$.
Согласно формализму Лагранжа УД МС представим в виде [16]
(дТ/ dq i )t - дТ/ dq i = S /.i H ij q j + Huqt + I^ H ji q j + h i = Qg i , где h i - l-я обобщенная инерционная сила (ОИС), вычисляемая по формулам:
hi = hai + hbi + hpi — дТ/ дqi, hai = I. Hijqj, hbi = Huqi, hpi = I!j-i+i Hjiqj, (6)
ат aqt = hdi + hei, hdi = 0,5I^i Hjjiqj, hei = Ik=2 qkIj=i Hkjiqj.
Из формул (6) следует искомая формула (4).
Выделим из ОИС гироскопические составляющие, т. е. ГИС. Для этого выполним следующие очевидные преобразования:
I i.i Mi = I^ q i I ^=2 q k I jZ H kji q j =
= I ^.2 q kIM q j^^i H kji q i = I^ q i I j^l q j H ij .
I^ (h ai - h ei )q i = I^ i q i l j~A H ij q j - ^ q i I j^i q j H ij = 0.
Следовательно, по определению Тэта (мощность ГИС равна нулю [16]) выражение ha i - he i входит в формулу вычисления ГИС(1). Аналогично
I^i hdiqi = 0,5I^i qiI^.i Hjjiqj = 0,5IjCi qj I^i Hjjiqi = 0,5I^ Hjjqj.
H^ (0,5h bi - h1 i )q i = 0,5 1 .i Й„я ? - 0,5I ^.i Hnq j = 0, т. е. выражение 0,5h bi - h ^i входит в формулу вычисления ГИС(1).
Таким образом, hi = 0,5hbi + hpi + hgi, где формула вычисления ГИС имеет вид hgi = hai - hei + 0,5hbi - hdi = hai + 0,5hbi - дТ/ дqi, что с учетом обозначений (6) доказывает искомую формулу (5).
Выражение 0,5h bi + hp i , не входящее в ГИС(1), представим в виде суммы hc i + hO i , где hc i - ЦИС, hO i - КИС. Для этого в выражениях h bi , hp i выделим слагаемые с квадратами ОС.
Эти слагаемые составляют ЦИС. Оставшиеся слагаемые составляют КИС. Используя обозначение (6), получим
0,5hbi + hpi = 0,5Н^ + J Li+i H jt q j =
= 0,5qf L k^l Hiikqk + E y^i+i qjl N =i Hjikqk = hci + hoi , где
-
hci = 0,5Hiiiqi + ’LIj=i+i Hjijqj ,
-
hoi = 0,5 qi E fc^l Hiikqk + E j^i+i qjl N ^I Hjikqk ,
что совпадает с искомыми формулами (2), (3). Утверждение доказано .
Рассмотрим древовидные системы тел с открытыми ветвями (ДСТОВ), состоящие из поступательных и вращательных кинематических пар, где в качестве ОК приняты относительные линейные и угловые величины. В ДСТОВ каждое тело имеет несущие и несомые тела. В случае подсистемной нумерации тел ДСТОВ знак суммирования величины O j по номерам тел, несущих i-е тело, записывается в виде j j -1 O j и знак суммирования величины O j по номерам тел, несомых i-м телом, записывается в виде lN=i+I O j , где N i - номер последнего тела i-й подсистемы ДСТОВ [15].
Утверждение 2 . УД ДСТОВ с подсистемной нумерацией тел представимы в виде
-
1 1 Hijqj + Hiiqi + E y^i+i Hjiqj + hci + hoi + hgi = Qgi ,
где i = 1,2,..., N;
hci = I-^i+i Hjijqj(7)
-
- ЦИС(i), действующая на i-е тело и зависящая от квадратов ОС его несомых тел;
hoi = h0i + ^j^^i+i qjIk=i+2 Hjikqk
-
- КИС(i), действующая на i-е тело и зависящая от произведений разноименных ОС его несомых тел, а также от произведения ОС i-го тела на ОС его несомых тел;
hgi h; - V ■ Hijqj — дТ/дЯ1(9)
-
- ГИС(i), действующая на i-е тело и зависящая, во-первых, от квадратов ОС его несущих тел, во-вторых, от произведения ОС i-го тела на ОС его несомых тел, в-третьих, от произведений разноименных ОС его несущих тел на ОС как несущих, так и несомых тел;
hgi = 0,5qiE;,:ii+iHiijqj
-
- составляющая КИС(Г) и ГИС(i), действующая на i-е тело и зависящая от произведения ОС i-го тела на ОС его несомых тел.
Доказательство . Общий вид УД для ДСТОВ получается из формулы (1) путем использования записей сумм по номерам несущих и несомых тел.
В ДСТОВ с подсистемной нумерацией тел H jj зависит от q j +i, q j +2, •••, qNj , H kj зависит от q j +i, q j +2, ...,q k , q k +i, ..., qNk и в обозначении H kji индекс i должен быть больше индекса j [15]. Поэтому для ДСТОВ формулы (2), (3) принимают вид:
hci = Ey^i+i Hjijq7?, hoi = 0,5qilNLi+i Hiijqj + lNii+i qjI^+2 Hjikqk, что с учетом обозначения (10) совпадает с формулами (7), (8).
Для ДСТОВ из формулы (5) получим hgi = I j-1 Hijqj + 0,5qi iN^i+i Hiijqj — дТ/ dqi, что с учетом обозначения (10) совпадает с формулой (9). Утверждение доказано.
Рассмотрим системы тел с одной открытой ветвью (СТОВ). Для них цепочка тел с номерами 1,2,...,i — 1 является несущей для i -го тела и цепочка тел с номерами i + 2, i + 3,... ,N является несомой i-м телом.
Утверждение 3 . УД СТОВ представимы в виде
Sj-i H^jQj + HuQi + 2y-i+i Hj^Qj + hc( + hoi + hg^ — Qg^, где i — 1,2,...,N;
hd — ^=i+i Hjtjqj;(12)
hot — hsoi + Ij^i Qj iN-j+i (Hki]- + Hjik)qk;(13)
9Т/ dqt — 0,5 lj-\ Hjjtqj + Sj-i Qj iN-j+i H^qk(14)
hgt — h90i + Ijzi Htjqj - дТ/ dqt;(15)
hsot — 0,5Hitqi — 0,5qt lN=t+i H^;(16)
hcN — hoN — hs0N — дТ/ dqi — 0; hoi — hgi — h90i.(17)
Доказательство . Для СТОВ элементы H kj МИК, где k > j, зависят от q j +i, q j +2, •••, qN [15].
Следовательно, для СТОВ формулы (7), (9), (10) принимают искомый вид (12), (15), (16).
Для доказательства формулы (13) преобразуем двойную сумму в формуле (3) с учетом структурных свойств СТОВ. Получим
S N-i+i q j l N=i H jik q k — I .N=ui q j^k-i H jik q k + S N-j+i H jik q k ). (18)
В первой двойной сумме изменим порядок суммирования по формуле (2) приложения 1 книги [15]. Тогда получим lN-i+i ^^k-i Hjikqk — lN-i+i qklN-k+i Hjikqj — lN=i+i qjIk-j+i Hkijqk. Следовательно, формула (18) принимает вид lN=i+i qjIk-/i Hjikqk — TJ—i+i qjIk-j+i Hkijqk +lN-i+i qjlN-j+i Hjikqk и формула (3) для СТОВ представляется в искомом виде (13). Утверждение доказано.
-
2. Примеры выписывания ОИС
Рассмотрим примеры выписывания по формулам (11)–(17) УД СТОВ с явно выраженными ЦИС, КИС и ГИС.
В УД используются моменты инерции тел относительно осей их связанных систем координат (ССК). Для сокращения записей будем считать, что ССК i -го тела, т. е. ССК(i), является главной для i-го тела и два осевых момента инерции тела совпадают. Обозначим через I j^ ,i f , i f осевые моменты инерции i -го тела, т. е. i f - момент инерции i -го тела относительно оси O i X i , i f - момент инерции i -го тела относительно оси O ^ y, i f - момент инерции i -го тела относительно оси O jZi , где Xi, ^, , Z i - орты CCK(i), O i - полюс i-го тела.
Условимся вводить ССК тел так, чтобы в исходном положении СТОВ, т. е. для нулевых значений ОК, оси CCK(i) были параллельны соответствующим осям неподвижной СК, в которой ось абсцисс Ox направлена горизонтально вправо, ось ординат Оу направлена вертикально вверх и ось аппликат Oz - на нас. В кинематических схемах СТОВ тела вращательных кинематических пар будем изображать в исходных относительных положениях, т. е. когда их ОК равны нулю.
Для упрощения процесса выписывания ОИС введем в обращение таблицу ОК (ТОК). Заголовок ТОК содержит обозначения номера строки к и столбца j МИК, на пересечении которых расположен элемент H kj , где к > j. За числами к и j в порядке возрастания номеров перечислены ОК, от которых зависят элементы МИК, т. е. циклические ОК в ТОК не записываются. Под заголовком проведена двойная горизонтальная линия. ТОК разбита на блоки, которые отделены друг от друга двойной горизонтальной линией. Номер блока равен номеру, который записан в первом столбце. Столбцы k,j отделены от столбцов ОК двойной вертикальной линией.
ТОК заполняется по следующим правилам.
-
1. Если цифра в столбце j последней строки к -го блока равна к, то индикаторы 0 или 1 в следующих столбцах указывают на зависимость (индикатор равен 1) или независимость (индикатор равен 0) от соответствующей ОК диагонального элемента H kk .
-
2. Если первые две цифры строки равны k, j, то следующие за ними индикаторы 0 или 1 указывают на зависимость (1) или независимость (0) элемента H kj от соответствующей ОК.
-
3. Если элементы Hk j постоянны, где к > j, то строка с первыми двумя числами к и j в ТОК отсутствует.
Каждый пример начинается с рисунка, на котором представлены кинематическая схема манипулятора (далее – схема), его МИК и ТОК. Схема и МИК взяты из примеров 1–6 книги [15]. На схеме изображены положения полюсов тел, каждое из которых является началом ССК тела, и положения центров масс (ЦМ) тел – в виде крестиков. В записи элементов МИК и в основном тексте используются следующие обозначения:
a t = m oi lO j C j l, где mo t - масса i-го тела, О^ - радиус-вектор, проведенный из полюса i-го тела в его ЦМ;
m t - масса i -й подсистемы, т. е. тел с номерами i,i + 1,...,N;
qt - орт оси вращения O t q t i -го тела;
P t - орт оси O f P t поступательного движения i -го тела относительно предшествующего тела;
st = sin(qt); Ct = cos(qt).
Здесь и далее для сокращения записи МИК опускается ее обозначение H, а вместо ненулевых наддиагональных элементов записываются их обозначения.
Аббревиатуру МС в примерах следует трактовать как манипуляционная система робота.
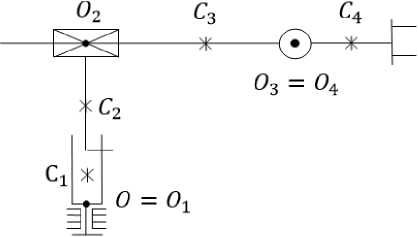
Пример 1 . МС с полярной СК в вертикальной плоскости на рис. 1. Для этой МС имеем:
N = 2; qt = z; р2 = х2= Xi; q2 = O^;
масса mo t (i = 1,2) распределена симметрично оси O ^ X t .

Рис. 1. Механическая система с полярной системой координат Fig. 1. Mechanical system with polar coordinate system
|
к |
j |
fP |
|
3 |
1 |
1 |
По формулам (17) имеем:
hc2 = ^02 = hS02 = дГ/ dqi = 0, hoi = hgi = hSgi.
Для i = 1 по формулам (12), (16) и ТОК выпишем hCi = H2i2q2 = 0, ^oi = 0,5qlH112q2, где с учетом выражения Hii имеем Hii2 = 2m2q2.
Для i = 2 по формуле (14) выпишем
дГ/ dq2 = 0,5Hii2q2 + qiH2i2q2 = m2q2ql.
Следовательно, по формуле (15) получим
hg2 = H2iqi — дТ / dq2 = -m2q2q2.
Таким образом, УД МС на рис. 1 с выделенными ГИС имеют следующий вид:
№ + 12 + m2q2)qi + 2hgi = Qgi,
( m2q2 + hg2 = Qg2, где qgi = m2q2qiq2, hg2 = -m2q2q2. Действительно, по определению Тэта
hgiqi + hg2q2 = m2q2q2q2 — m2q2qlq2 = 0.
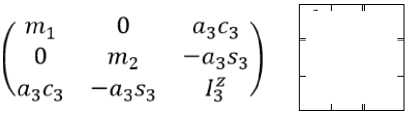
Пример 2 . МС с декартовой СК в вертикальной плоскости на рис. 2. Для этой МС имеем:
N = 3; pi = у; p2 = X; q3 = z; qi = OOi; q2 = OiO2;
масса mo3 распределена симметрично оси O3X3.
По формулам (17) имеем:
hc3 = ho3 = hg3 = дГ/ dqi = 0, hoi = hgi = hflgi.
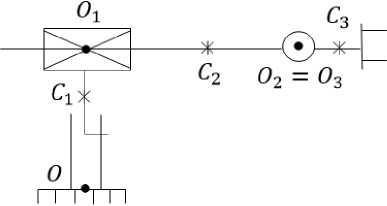
Рис. 2. Механическая система с декартовой системой координат Fig. 2. Mechanical system with Cartesian coordinate system

Для i = 1 по формулам (12), (16) и ТОК выпишем hc1 = ^212^2 + Н31393 = Н31393,
^о1 = 0'591(^11292 + Н11393) = hg1 = 0, где с учетом выражения Н31 имеем Н313 = — a3s3.
Для i = 2 по формулам (12), (16), ТОК и элементам МИК выпишем hc2 = Н 3239з = - а3С3 9 з ,
hs02 = 0'592Н2292 = 0, ^02 = дТ/ д92 = 0, hg2 = 0.
Согласно определению Тэта, если ^ = 3 и hg1 = h g 2 = 0, то h g 3 = 0.
Таким образом, в МС на рис. 2 ГИС отсутствуют и УД имеют вид
(№ 1 9 1 + н з19з + Н32 9 з = Q g1 , m292 + н з29з - н з19з = Qg2 , Н31 9 1 + Н3292 + ^з9з = Qg3 .
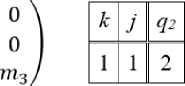
Пример 3 . МС с цилиндрической СК на рис. 3 (N = 3) . Для этой МС имеем:
^ = 3; ^ = у; р2 = ^; р3 = —у; 92 = O1O2; 9з = O2O3;
массы m0 i (для i = 1 и i = 3) распределены симметрично осям О ^ у;
масса m02 распределена симметрично оси О2%2.
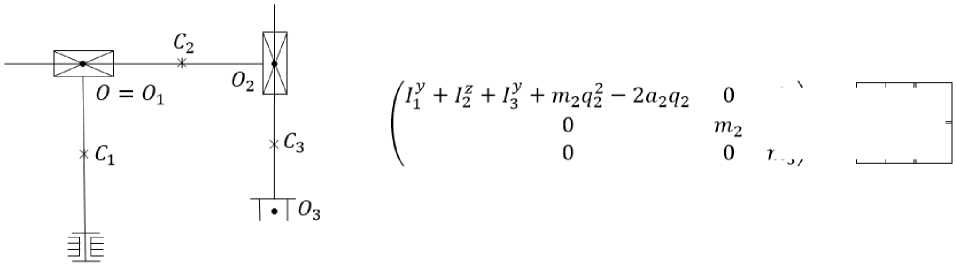
Рис. 3. Цилиндрическая механическая система ( N = 3)
Fig. 3. Cylindrical mechanical system ( N = 3)
По формулам (17) имеем
hC3 = ho3 = hg3 = дТ/ д91 = 0, h01 = hg1 = hg1.
Для i = 1 по формулам (12), (16) и ТОК выпишем hC1 = Н21292 + Н3139 2 = 0, hg 1 = 0 ' 591Н11292 .
С учетом выражения Н11 имеем
Н112 = 2т292 - 2^2 = 2mq2, где mq2 = №292 - «2.
Для i = 2 по формулам (12), (16) и ТОК выпишем hc2 = Н32393 = 0, hg2 = 0 ' 592Н22393 = 0.
По формуле (14) выпишем
дТ / dq2 = 0,5H112q^ = mq2ql,hg2 = — дТ/ dq2 = —w^qi.
Таким образом, УД МС на рис. 3 с выделенными ГИС имеют следующий вид: ГUi + 12 + I3 +m2q2- 2a2q2)qi + 2hgi = Qgi, j m2q2 + hg2 = Qg2, m3q3 = Qg3, где hgi = m^q^, hg2 = —m^i- Действительно, hgiqi + hg2q2 = m^q^ — mq2q^q2 = 0.
Пример 4. МС с цилиндрической СК на рис. 4 (N = 4 ). Для этой МС имеем:
^ = 4; ^ = у; р2 = у; р3 = %i; q4 = z4 = Zi; q2 = O^; q3 = O2O3;
массы mO i (i = 1,2) распределены симметрично осям О ; у;;
массы mO j (j = 3,4) распределены симметрично осям O j X j .
Иц
О
О
. о
о
ТП2 о о 4 С4
оот3
ci4s4
|
k |
j |
43 |
44 |
|
1 |
1 |
1 |
1 |
|
4 |
2 |
0 |
1 |
|
4 |
3 |
0 |
1 |
Рис. 4. Цилиндрическая механическая система ( N = 4)
Fig. 4. Cylindrical mechanical system ( N = 4)
По формулам (17) имеем
hC4 = ho4 = hs04 = дТ/ dqi = 0, hoi = hgi = h90i.
Для i = 1 по формулам (12), (16) и ТОК выпишем hCi = 0, hgi = 0,5qi(Hii3q3 + Hii4q4').
Используя МИК, получим
Hii3 = 2(m3q3 + a4C4 - Пз) = 2hq,
Hii4 = 2q3(-a4s4) — 2(I4 — I4()c4s4 = -2Iq ,
где hq = m3q3 + a4c4 — a3, Iq = [a4q3 + (If — If)c4]s4. Следовательно, h0i = (hqq3 - Iqq4')qi.
Для i = 2 по формулам (12)-(16), ТОК и МИК выпишем hc2 = H323q3 + H424q4 = —a4S4q4,
hS02 = 0, ho2 = 0, дТ/ dq2 = hg2 = 0.
Для i = 3 по формулам (12)-(16), ТОК и МИК выпишем
hc3 = H434q4 = —a4C4q4, ho3 = 0, hg3 = 0,
дТ/ дqз = 0,5Hii3q12 = hqq2, hg3 = — дТ/ дqз = —hqq2.
Для i = 4 по формулам (14), (15) выпишем
дТ/дq4 = 0,5Hii4qi = —Iqqf,hg4 = —дТ/дq4 = Iqq2
Таким образом, УД МС на рис. 4 с выделенными ГИС имеют следующий вид:
/1 qi + 2hgi = Qgi ,
rn2q2 + H42q4 + H43qi = Qg2, m3q3 + H43q4 - H42q4 + hg3 = Qg3, < H42q2 + H43q3 + I4q4 + hg4 = Qg4, где hgi = hqqiq3 - Iqq^; hg3 = -hqql; hg4 = IqQ^ Очевидно, что hgiqi + hg3q3 + hg4q4 = 0.
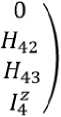
Пример 5. Ангулярная МС на рис. 5 (N = 3 ) . Для этой МС имеем: N = 3; q^y; q2 = q3 = Z i ; L = O 2 O 3 ; C 23 = cos(q 2 + q3 );
массы mO i (i = 1,2,3) распределены симметрично осям O ^ y.
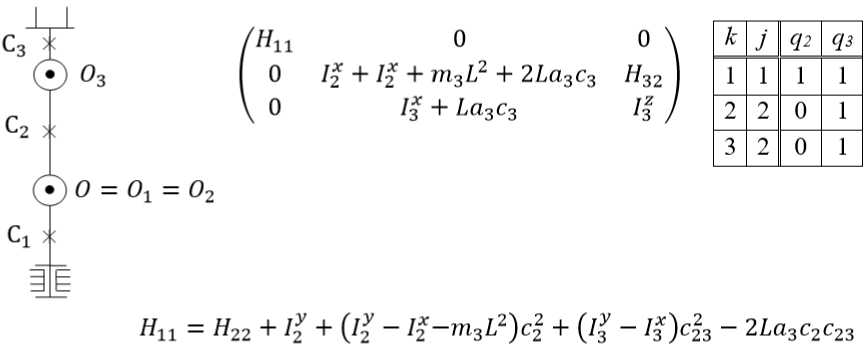
Рис. 5. Ангулярная механическая система ( N = 3)
Fig. 5. Angular mechanical system ( N = 3)
По формулам (17) имеем
hC3 = ho3 = h9O3 = дТ/ dqi = 0, hoi = hgi = h90i.
Для i = 1 по формулам (12), (16) и ТОК выпишем hci = 0, hO!i = 0, 5qi ( Hii2q2 +Hii3q3) .
Для i = 2 по формулам (12)-(16), ТОК и МИК выпишем hc2 = H323q3 = —La3S3ql, hO>2 = 0,5q2H223q3 = —La3S3q2q3, ho2 = h9O2, dT/dq2 = 0,5Hii2ql hg2 = hg2 — дТ/ dq2 = 0,5(H223q2)q3 — Hii2ql.
Для i = 3 по формулам (14) и (15) выпишем дТ/ dq3 = 0,5(Hii3qI + H223q2^ + q2H323q3, hg3 = H3iqi + H32q2 — ^q^ = H323q2q3 — 0,5(Hii3qI + H223q2) — q2H323q3.
Таким образом, УД МС на рис. 5 с выделенными ГИС имеют следующий вид:
Hiiqi + 2hgi = Qgi ,
H22q2 + H32q3 — La3S3ql — La3S3q2q3 + hg2 = Qg2, H32q2 + I3q3 + hg3 = Qg3.
Вычислим мощность ГИС. Получим hgiqi + hg2q2 + hg3q3 = 0,5qi(Hii2q2 + Hii3q3)qi +
+ 0, 5(H223q2q3 — HiI2qiL)q2 — 0 , 5(HiI3qI + H223q2)q3 = 0.
Пример 6 . Универсальная МС с декартовой СК (рис. 6). Для этой МС имеем: W — 6; p j — z; p2 — x; q3 — y; p4 — —y;
q5 — Z5; q6 — Z6; q1 — 001; q2 — 0T02; q4 — 0304;
массы mOi (i — 3,4,5,6) распределены симметрично дующие обозначения:
осям
использованы сле-
0tyt . В МИК
В
|
— / 5 — / 5 |
+ / ; —/б7 |
||||
|
ma |
0 |
^31 |
0 |
^51 |
0 \ |
|
0 |
m2 |
^32 |
0 |
^52 |
0 ' |
|
—ttCgSs |
-ns3s5 |
Л " Bel |
0 |
0 |
^63 |
|
0 |
0 |
0 |
m4 |
^S4 |
0 |
|
—aS3Cg |
ac3s3 |
0 |
-«s5 |
15 + 1б |
0 |
|
0 |
0 |
l^s |
0 |
0 |
'U |
а — а 5 + а ^ ; Л — ^ + / ^ + / 5 + / 6 ;
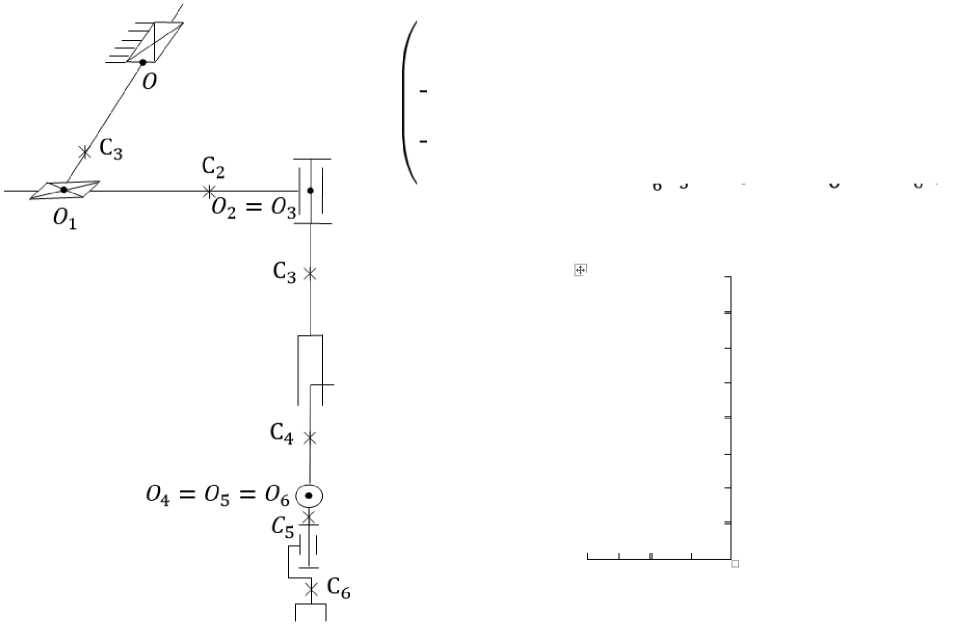
Рис. 6. Механическая система с декартовой системой координат Fig. 6. Mechanical system with Cartesian coordinate system
По формулам (17) имеем
hc6 — hob — hS06 — дГ/ 8q, — 0, ho1 — hgl — hOr
Для i — 1 по формуле (12) на основе ТОК выпишем отличные от нуля ЦИС. Получим hc1 — ^ 313q3 + ^ 515q5 , hc2 — ^ 323q3 + ^ 525q5 , hc4 — ^ 545q5 .
По формуле (16) на основе ТОК выпишем
-
ho3 — 0 , 5q3 ^ 335q5 .
По формуле (13) на основе ТОК выпишем отличные от нуля КИС. Получим
-
hO1 — q3( ^ 513 + ^ 31s ) q5 , ho2 — q3( ^ 523 + ^ 325 ) q5 ,
-
h03 — hO°3 + q5 ^ 635q6 .
По формуле (15) на основе ТОК выпишем отличные от нуля ГИС. Получим
-
hO3 — h03 +q1№13q3 +^ 315^ ) + q2№23q3 +^ 325^ ) -дГ/^3 ,
-
hO5 — q1( ^ 513q3 + ^ 515q5 ) + q2( ^ 523q3 + ^ 525q5 ) + q4 ^ 545q5 — дГ/ dq5 ,
-
hO6 — q3 ^ 635q5 .
Таким образом, УД МС на рис. 6 с выделенными ГИС имеют следующий вид:
-
г т^ - ac3s5q3 - as3c5q5 + a[s3s5(q2 + q^) - 2c3c5q3q5"\ = Qgi,
m2q2 - as3S5q3 + ac3c5q5 - a[c3s5(ql + qi2) + 2s3C5q3q5] = Qg2,
-
_ -ac3S5q1 - as3c5q2 + (Л - Bcj^ + I^c^ + Bs5c5q3q5 + hg3 = Qg3, m4q4 - as5q5 - ac3qf = Qg4,
-as3c5qi + ac3c5q2 - as5q4 + (I^ + Ig)q5 + hg5 = Qg5,
-
. Iec5q3+I^q6-I^s5q3q5 = Qg6,
где hg3 = Ibc5q3q5 - I^'s5q5q6, hg5 = I6s5q3q6 - Ibssc5q2, hg6 = q3H635q5.
ОИС принимают вид
hi = a[s3s5(q2 + qi2) - 2c3c5q3q5],
h2 = -a[c3s5(ql + qi;) + 2s3c5q3q5],
h3 = (2Ibc5q3 - I6'q6)s5q5, h4 = -ac5q5q5, h5 = (I6q6 - Ibc5q3)s5q3, h6 = -I6's5q3q5.
Заключение
Описанные формализмы позволяют выделять ОИС в произвольных механических системах. Особое значение имеет выделение ГИС, так как их мощность равна нулю, что упрощает решение ряда задач, связанных с вычислением работы, установочной и потребляемой мощности приводов, а также оптимальным управлением в смысле минимизации энергозатрат на реализацию программных движений управляемых систем тел.
Список литературы Выделение гироскопических инерционных сил из центробежных и кориолисовых инерционных сил
- Lewis F.L., Dawson D.M., Abdallah C.T. Robot Manipulator Control: Theory and Practice. Marcel Dekker, Inc., New York; 2004. P. 110–118.
- Kayacan, Erkan; Kayacan, Erdal; Ramon, Herman; Saeys, Wouter. Velocity Control of a Spherical Rolling Robot Using a Grey-PID Type Fuzzy Controller with an Adaptive Step Size. In: 10th IFAC Symposium on Robot Control International Federation of Automatic Control. Dubrovnik, Croatia, September 5–7, 2012; 2012. P. 863– 868. DOI: 10.3182/20120905-3-HR-2030.00123
- Sadati S.M.H., Naghibi S.E., Naraghi M. An Automatic Algorithm to Derive Linear Vector Form of Lagrangian Equation of Motion with Collision and Constraint. Procedia Computer Science. 2015;76:217–222. DOI: 10.1016/j.procs.2015.12.345
- Ghaleb N.M., Aly A.A. Modeling and Control of 2-DOF Robot Arm. International Journal of Emerging Engineering Research and Technology. 2018;6(11):24–31.
- Amin A.T.M., Ab Rahim A.H., Low C.Y. Adaptive controller algorithm for 2-DOF humanoid robot arm. Procedia Technology. 2014;15:765–774. DOI: 10.1016/j.protcy.2014.09.049
- Korayem M.H., Shafei A.M., Shafei H.R. Dynamic modeling of nonholonomic wheeled mobile manipulators with elastic joints using recursive Gibbs–Appell formulation. Scientia Iranica. 2012;19(4):1092–1104. DOI: 10.1016/j.scient.2012.05.001
- Delavari H., Ghaderi R., Ranjbar N.A., HosseinNia S.H., Momani S. Adaptive Fractional PID Controller for Robot Manipulator. In: Proceedings of FDA’10. The 4th IFAC Workshop Fractional Differentiation and its Applications. Badajoz, Spain, October 18–20, 2010; 2010. P. 1–7.
- Jafarov E.M., Istefanopulos Y., Parlakçi M.N.A. A new variable structure PID-controller for robot manipulators with parameter perturbations: an augmented sliding surface approach. In: 15th Triennial World Congress. Barcelona, Spain, 2002. P. 365–370.
- JianXuandLeiQi. Robust Adaptive PID Control of Robot Manipulator with Bounded Disturbances. Hindawi Publishing Corporation Mathematical Problems in Engineering. 2013;2013:1–13. DOI: 10.1155/2013/535437
- Chunqing H., Songjiao Sh. PID feedback for mixed H2/H∞ tracking control of robotic manipulators. Journal of Systems Engineering and Electronics. 2004;15(4):579–585.
- Elshabasy M.M.Y.B., Mohamed K.T., Ata A.A. Power optimization of planar redundant manipulator moving along constrained-end trajectory using hybrid techniques. Alexandria Engineering Journal. 2017;56(4):439–447.
- Hošovský A., Piteľ J., Židek K., Tóthová M., Sárosi J., Cveticanin L. Dynamic characterization and simulation of two-link soft robot arm with pneumatic muscles. Mechanism and Machine Theory. 2016;103:98–116. DOI: 10.1016/j.mechmachtheory.2016.04.013
- Shala A., Likaj R., Bruqi M., Bajrami X. Propulsion Effect Analysis of 3Dof Robot under Gravity. Procedia Engineering. 2015;100:206–212. DOI: 10.1016/j.proeng.2015.01.359
- Fontes J.V., da Silva M.M. On the dynamic performance of parallel kinematic manipulators with actuation and kinematic redundancies. Mechanism and Machine Theory. 2016;103:148–166. DOI: 10.1016/j.mechmachtheory.2016.05.004
- Телегин А.И. Основы теоретической механики систем тел. С приложениями в робототехнике: учеб. пособие для вузов. СПб.: Лань, 2023. 252 с. [Telegin A.I. Osnovy teoreticheskoy mekhaniki sistem tel. S prilozheniyami v robototekhnike: ucheb. posobie dlya vuzov [Fundamentals of Theoretical Mechanics of Body Systems. With applications in robotics: textbook for universities]. St. Petersburg: Lan'; 2023. 252 p. (In Russ.)]
- Lur'e A.I. Analiticheskaya mekhanika [Lur'e A.I. [Analytical Mechanics]. Moscow: Fizmatgiz; 1961. 824 p. (In Russ.)]
