Высокоточные навигационные определения по сигналам ГНСС

Автор: Дворкин В.В., Карутин С.Н.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Статья в выпуске: 6 (52), 2013 года.
Бесплатный доступ
Проведен сравнительный анализ соответствия текущего состояния комплекса функционального дополнения ГЛОНАСС перспективным требованиям потребителей в части точности навигационного обеспечения. Предложен алгоритм высокоточного определения местоположения потребителей, обеспечивающий удовлетворение перспективных требований потребителей. Приведены результаты экспериментального исследования алгоритмов работы данного комплекса при использовании существующих технических средств системы дифференциальной коррекции и мониторинга. На основе проведенных исследований сделаны выводы о перспективах развития систем высокоточного определения местоположения по радиосигналам спутниковых навигационных систем.
Высокая точность, гнсс, сдкм, функциональные дополнения
Короткий адрес: https://sciup.org/148177230
IDR: 148177230 | УДК: 621.396.99
Precise positioning according to GNSS signal
The authors present a comparative analysis of of the compliance of global navigation satellite systems (GNSS) augmentations current status with the future user requirements in positioning accuracy. The algorithm of precise positioning is proposed. Experimental studies of the complex algorithms based on the use of the existing system for differential correction and monitoring facilities are presented. On the basis of the research results the forecast of GNSS precise positioning systems development is made.
Текст научной статьи Высокоточные навигационные определения по сигналам ГНСС
По мере совершенствования глобальных навигационных спутниковых систем (ГНСС) появляются новые сферы практического применения навигационной аппаратуры потребителя (НАП) этих систем, которые, в свою очередь, требуют дальнейшего повышения точности навигационно-временного обеспечения. Сегодня НАП используют при организации дорожного движения (в том числе по платным дорогам), разборах дорожно-транспортных происшествий и определении страховых случаев, организации автоматического управления дорожной, строительной и сельскохозяйственной техникой, контроле деформации сооружений и высокоточном мониторинге движения точек земной поверхности для снижения рисков и смягчения последствий чрезвычайных ситуаций природного и техногенного характеров, при функционировании энергетических систем, систем транспортировки нефти и газа, в фундаментальных научных исследованиях и в ряде других приложений.
В настоящее время разработаны и широко применяются на практике методы навигации, в которых потребитель имеет возможность либо осуществлять высокоточные относительные навигационные определения (погрешность порядка единиц сантиметров) на расстояниях в несколько десятков километров от опорных станций, либо проводить абсолютные навигационные определения с погрешностью на уровне единиц метров. Необходимо отметить, что в последние годы произошло несколько событий, которые создали основу для дальнейшего повышения точности определения местоположения по сигналам ГНСС. Во-первых, системы ГЛОНАСС и GPS прошли этап очередной модернизации – на орбите появились навигационные космические аппараты (НКА) нового поколения, излучающие навигационные радиосигналы в диапазонах L1 и L2, что позволяет практически полностью устранять ионосферную задержку сигнала двухчастотным методом [1]. Во-вторых, международная служба ГНСС (англ. International GNSS Service, IGS) в результате масштабных исследований разработала алгоритмы оценки эфемерид и частотно-временных параметров бортовых шкал времени НКА, которые дают возможность оценивать данные параметры с погрешностью в единицы сантиметров [2]. Эти обстоятельства позволили создать алгоритмы высокоточных абсолютных навигационных определений (англ. Precise Point Positioning, PPP) [3–5], которые характеризуются точностью определения координат, сопоставимой с относительными методами RTK (см. таблицу, рис. 1).
Программой развития системы ГЛОНАСС на 2012–2020 гг. предусматривается повышение точности навигационного обеспечения потребителей при использовании функциональных дополнений с текущего уровня в 1 м (СКО) до 0,1 м (СКО) в 2020 г. Проведенный выше анализ, основанный на результатах теоретических и экспериментальных исследова- ний, позволяет считать возможным решение данной задачи за счет создания национального широкозонного высокоточного комплекса функционального дополнения, способного предоставить потребителям на территории Российской Федерации возможность осуществлять навигационные определения не только по сигналам системы ГЛОНАСС, но и зарубежных ГНСС.
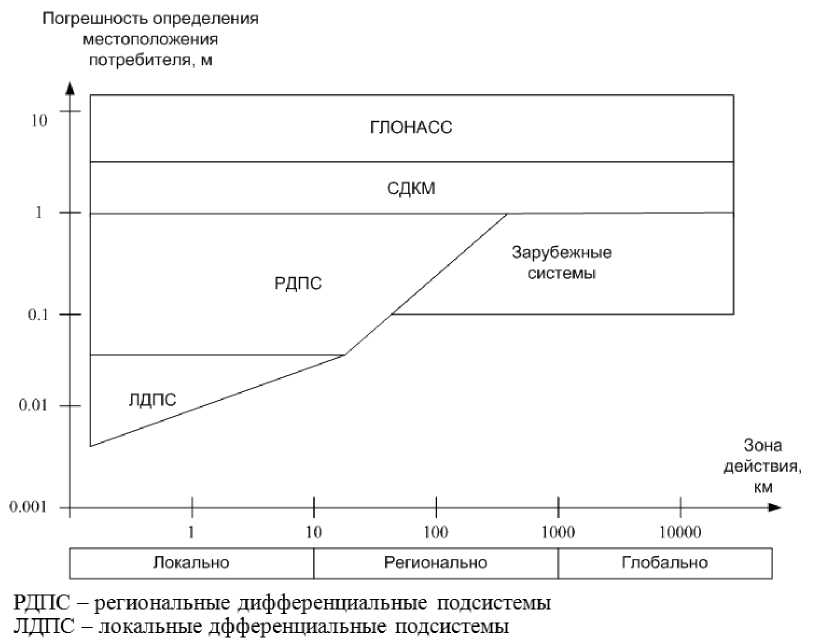
Рис. 1. Классификация функциональных дополнений
Составляющие погрешности навигационных определений
|
Составляющая погрешности |
Режим работы навигационной аппаратуры потребителя |
|||||
|
6 ’в ® я о 2 § § у cd |
“ >я ’5 я я О 2 У |
)S 2 У Ч У У Ч ^ч ч |
я § со У о д Рч У ч |
о Н о и Н Р о ч И CD О н ° g |
3 Ч ° я о н § 2 СО |
|
|
Эфемериды |
1 |
1 |
0,02 |
0,3 |
0,02 |
0,15 |
|
Частотно-временные параметры |
1 |
1 |
0,02 |
0,3 |
0,02 |
0,15 |
|
Ионосферная рефракция |
2 |
– |
0,02 |
0,05 |
– |
– |
|
Тропосферная рефракция |
0,5 |
0,5 |
0,03 |
0,12 |
0,03 |
– |
|
Аппаратурная погрешность |
0,5 |
0,7 |
0,5 |
0,5 |
0,003 |
0,003 |
|
Геометрический фактор |
2 |
2 |
2 |
2 |
||
|
Общая погрешность |
5,1 |
3,3 |
1 |
1,3 |
0,05 |
0,05–0,21* |
* Погрешность может быть уменьшена за счет обработки длительных интервалов наблюдений.
Метод высокоточного навигационного обеспечения. В общем случае для высокоточного определения координат потребителя необходимо использовать измерения, полученные в результате оценки задержки времени распространения навигационного радиосигнала по фазе несущих и огибающих колебаний, которые являются измерениям текущих навигационных параметров (ИТНП) – псевдодальности по коду S и псевдофазе Φ :
S ki j = R i j +δ Rj + c ⋅ ( δ t i -δ Tj ) +δ ki j +β i j + e k S i j , (1)
λ k ⋅Φ ki j = R i j +δ Rj + c ⋅ ( δ t i -δ Tj ) -
-δkij+βij+λk⋅Nkij+ekΦij, где Rij – геометрическая дальность между j-м НКА и i-м потребителем; δRj – погрешность оценки дальности за счет ошибок эфемеридно-временной информации, влияния релятивистских, гравитационных и приливных эффектов, смещения и вариации фазового центра антенн j-го спутника и i-го потребителя, ошибки многолучевости, аппаратурных задержек j-го спутника и i-го потребителя; с – скорость света; δti – расхождение между шкалами времени потребителя и используемой навигационной системы; δT j – расхождение между шкалами времени НКА и его навигационной системы; δkij – задержка распространения в ионосфере радиосигнала j-го НКА до i-го потребителя в диапазоне Lk , где k = 1 для диапазона L1, k = 2 для диапазона L2; βij – задержка распростране- ния радиосигнала НКА в тропосфере; Nkij – целочисленная неоднозначность псевдофазовых измерений; λk – длина волны несущих колебаний сигнала НКА;
ekS ij, ekΦij – шумовые погрешности измерений псевдо- дальности и псевдофазы соответственно. Модель измерения псевдофазы (2) содержит также неуказанные в (2) систематическое смещение измерения по j-му спутнику, связанное с взаимной ориентацией антенн спутника и потребителя, начальную фазу излучения несущего колебания j-м спутником, начальную фазу опорного колебания на несущей частоте в приемнике потребителя.
Для исключения ионосферной задержки распро- странения сигнала на практике используется следую- щая линейная комбинация измерений:
f 22
-
f 12 - f 22
⋅ S 2 i j =
=Rij +δRj+c⋅(δti-δTj)+Mij⋅τi+eSij, f2
λIF Φi = ⋅λ1⋅Φ1i
f 12 - f 22
f 22 f 12 - f 22
⋅λ 2 ⋅Φ 2 i j =
= Rj +δ Rj + c ⋅ ( δ t -δ Tj ) + Mj ⋅τ+λ⋅ Nj + e Φ j , iiiiIFii ,
60λ 77λ где λ=2=1≈0,0063 м – эквива-IF2222
лентная длина волны безионосферной псевдофазовой комбинации для радиосигналов НКА GPS; 7λ9λ
λ= 2 = 1 ≈ 0,053 м – эквивалентная IF 9 2 - 7 2 9 2 - 7 2
длина волны безионосферной псевдофазовой комбинации для радиосигналов НКА ГЛОНАСС; Mij ⋅ τ i – тропосферная задержка сигнала в виде произведения значения вертикальной тропосферной задержки сигнала i- й станции τ i и отображающей функции Mij в направлении j -го спутника; Nij = 77 ⋅ N 1 i j - 60 ⋅ N 2 i j – целочисленная неоднозначность безионосферной псевдофазовой комбинации для измерений по радиосигналам НКА GPS; Nij = 9 ⋅ N 1 j i - 7 ⋅ N 2 j i – целочисленная неоднозначность комбинации для измерений по радиосигналам НКА ГЛОНАСС. Необходимо отметить, что тропосферная задержка сигнала в измерениях (3) и (4) исключается путем использования соответствующей тропосферной модели. Как правило, в таких моделях вертикальная тропосферная задержка сигнала i -й станции τ i разбивается на сухую и влажную составляющие. Значение сухой составляющей определяется с помощью модели, а нескомпенсиро-ванная моделью остаточная составляющая влажной тропосферной задержки Δτ W рассматривается как дополнительный оцениваемый параметр.
Наличие в псевдофазовом измерении (2), (4) ряда немоделируемых смещений (аппаратурные задержки на спутнике и в приемнике потребителя, начальная фаза излучения несущего колебания j -м спутником, начальная фаза опорного колебания на несущей частоте в приемнике потребителя) приводит к тому, что целочисленная неоднозначность псевдофазовых измерений безионосферной комбинации (4) не может быть описана целым числом и оценивается как действительная величина. В результате на практике используется следующая модель безионосферной псев-дофазовой комбинации:
f2f2 λIFΦi = ⋅λ1⋅Φ1i - ⋅λ2⋅Φ2i =
f 12 - f 22 f 12 - f 22
= Rij +δ Rj + c ⋅ ( δ ti -δ Tj ) + Mij ⋅τ i + Аij + e Φ i j ,
где Аij – действительная оценка неоднозначности безионосферной комбинации псевдофазовых измерений, вобравшая в себя ряд немоделируемых смещений модели псевдофазы (2) и (4). В частности, модель (5) используется международной службой IGS при выполнении процедур высокоточной оценки ЭВИ НКА ГНСС.
Система уравнений (3) и (5) может в общем случае может быть записана в виде векторного уравнения относительно вектора искомых параметров Δ ( x , y , z , δ ti , Δτ W , Aij ) [6]:
С ⋅Δ+ Y - E = 0 (6)
где C – матрица коэффициентов при искомых параметрах Δ ; Y – вектор невязок измеренных и расчетных значений навигационных параметров, который характеризуется ковариационной матрицей W ; E – вектор некомпенсированных погрешностей измерения навигационных параметров.
Для оценки параметров местоположения потребителя можно использовать фильтр, основанный на оценке методом максимума апостериорной вероятности, т. е. фильтр Калмана, имеющий следующий вид:
Am = Am-1 + Km ■ Cm ■ W- ■ Ym , (7) Km = (Km-1 + Cmm ' W- ' Cm Л где m – момент времени, на который производится уточнение координат; Km – корреляционная матрица вектора искомых параметров в момент времени m.
Использование модели измерения псевдофазы (5) (т. е. факт отсутствия учета целочисленной природы неоднозначностей измерения псевдофазы) не накладывает ограничений на точность оцениваемых координат потребителя, но оказывает влияние на длительность периода сходимости решения, т. е. интервал обработки измерений, требуемый для получения заданной точности местоопределения.
В связи с этим, приоритетным направлением развития технологий абсолютной высокоточной спутниковой навигации является разработка процедур целочисленного разрешения неоднозначности псевдофа-зовых измерений, которые получили название Integer PPP [7–8]. В работах [9–10] показано, что время сходимости существенно сокращается по сравнению со случаем оценки действительных неоднозначностей. Основное отличие данных алгоритмов заключается в подходах к разделения искомого параметра А на составные части с целью выделения целочисленной неоднозначности в отдельную переменную. В процессе фильтрационного оценивания для системы обрабатываемых уравнений вида (7) используются поисковые процедуры, основанные на минимизации квадратичной формы в целых числах с применением целочисленного унимодулярного преобразования [11].
Результаты экспериментальной оценки алгоритма высокоточного определения местоположения. С целью экспериментальной проверки возможности практической реализации предложенного алгоритма высокоточного определения местоположения в период 2010–2012 годов была проведена серия экспериментов, в ходе которых оценивались погрешности прогнозирования ЭВИ и определения координат стационарных и подвижных потребителей с помощью (7). Помимо составных частей СДКМ при проведении экспериментов использовались технические средства геодезического отдела Центрального научного исследовательского института геодезии, аэросъемки и картографии имени Ф. Н. Красовского.
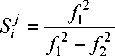
Первая часть экспериментального исследования заключалась в получении экспериментальной оценки точности прогнозирования ЭВИ при различной длительности интервала накопления ИТНП. На рис. 2, а представлены зависимости погрешности оценки прогнозных значений эфемерид НКА ГЛОНАСС от апостериорных оценок, полученных международной службой ГНСС, при различной длительности интервала накопления ИТНП. Полученные результаты показывают, что эфемериды НКА могут прогнозироваться на длительные временные интервалы без существенной потери точности, которая определяется длительностью интервала накопления ИТНП. В отличие от эфемерид, результаты оценки величины расхождения прогнозных значений бортовой шкалы времени НКА относительно апостериорных значений в зависимости от времени прогнозирования при использовании 4-х суточного интервала ИТНП показывают необходимость оперативного уточнения частотно-временных параметров для обеспечения высоких точностных характеристик (рис. 2, б). Указанное обстоятельство потребовало выделения системы оперативной оценки и прогнозирования частотновременных параметров (ЧВП) в отдельный модуль в составе центра управления. Совместный анализ полученных результатов показывает, что за время порядка 8 минут, которые необходимы для прогнозирования ЭВИ на следующий временной интервал, существенного ухудшения точности оценки ЭВИ не происходит.
Вторая часть исследования заключалась в проведении серии экспериментов по определению координат статического потребителя в соответствии с (7). В качестве потребителя была выбрана станция СДКМ, расположенная на территории Всероссийского научно-исследовательского института физико-технических и радиотехнических измерений.
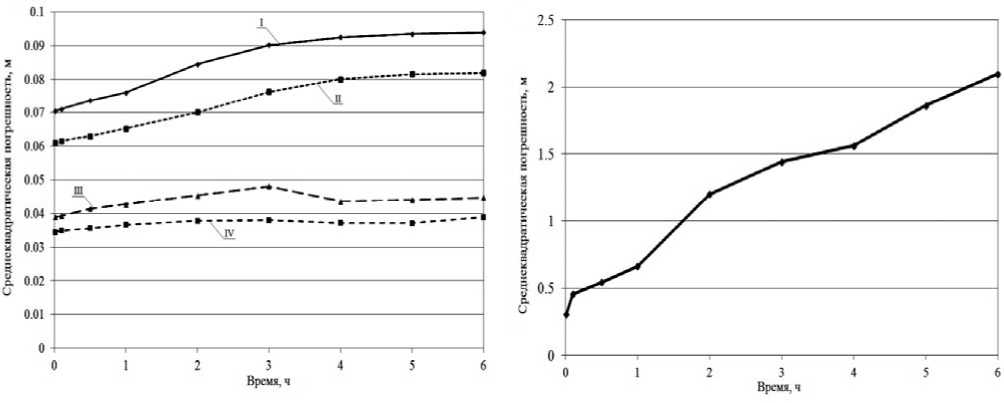
На рис. 3 приведены результаты высокоточной оценки координат станции при использовании интервалов наблюдения различной длительности, которые также подтверждают возможность получения оценок координат потребителя с погрешностью на уровне нескольких сантиметров. При расчетах использовалась ЭВИ НКА ГЛОНАСС и GPS, полученная по результатам апостериорной обработки первичных измерений глобальной сети СДКМ и федеральной астрономо-геодезической сети. В обработку были включены измерения псевдодальности и псевдофазы по радиосигналам НКА ГЛОНАСС и GPS в диапазонах L 1 и L 2. Для эксперимента использовали измерения, полученные в сентябре 2010 г.
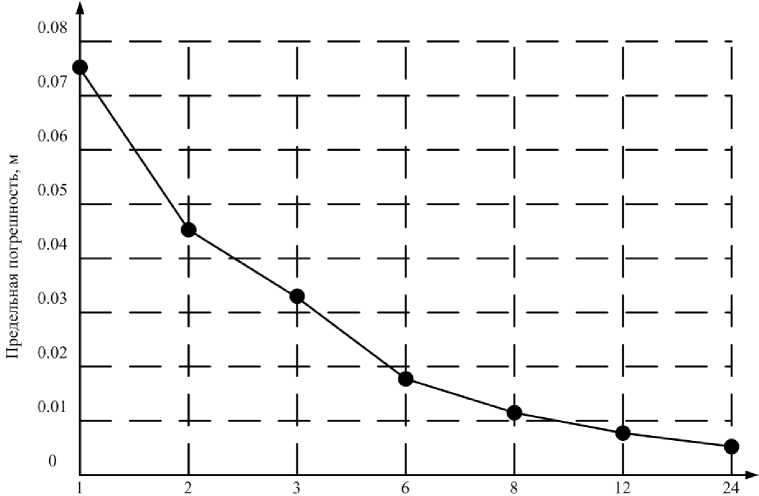
Заключительная серия экспериментов по оценке точности определения координат подвижных потребителей проводилась на территории аэродрома «Раменское». Поскольку в настоящее время для высокоточного относительного определения координат широко используется технология RTK, то для оценки погрешности определения координат подвижного потребителя в качестве опорной траектории использовались оценки координат, полученные в режиме RTK относительно стационарной базовой станции на территории аэродрома. Результаты сравнения оценок координат подвижного потребителя (рис. 4) показывают, что отклонение оценок координат в режиме абсолютного высокоточного местоопределения от опорной траектории не превышает 0,06 м в плане и 0,15 м по высоте.
Достижение высоких точностей определения координат потребителей в абсолютном режиме возможно благодаря использованию высокоточной ЭВИ в двухчастотной навигационной аппаратуре потребителя с учетом влияния ряда дополнительных факторов. Повышение точности апостериорной оценки и прогнозирования ЭВИ реализуется за счет применения глобальной сети ССИ. При этом точность навигационных определений не зависит от используемой навигацион- ной системы. Применение высокоточной эфемеридновременной информации, полученной с использованием глобальной сети станций сбора измерений, позволяет оценивать абсолютные координаты потребителей с погрешностью в единицы сантиметров. Полученные результаты показывают возможность применения СДКМ в качестве основы для построения перспективной системы высокоточного определения местоположения потребителя в реальном времени.
б
Рис. 2. Зависимости погрешности прогнозирования эфемерид ( а ) и ухода бортовой шкалы времени ( б ) НКА ГЛОНАСС при различной длительности интервала накопления ИТНП:
I – 1 сутки, II – 2 суток; III – 3 суток; IV – 4 суток
Время, ч
Рис. 3. Погрешность апостериорной оценки координат стационарного потребителя
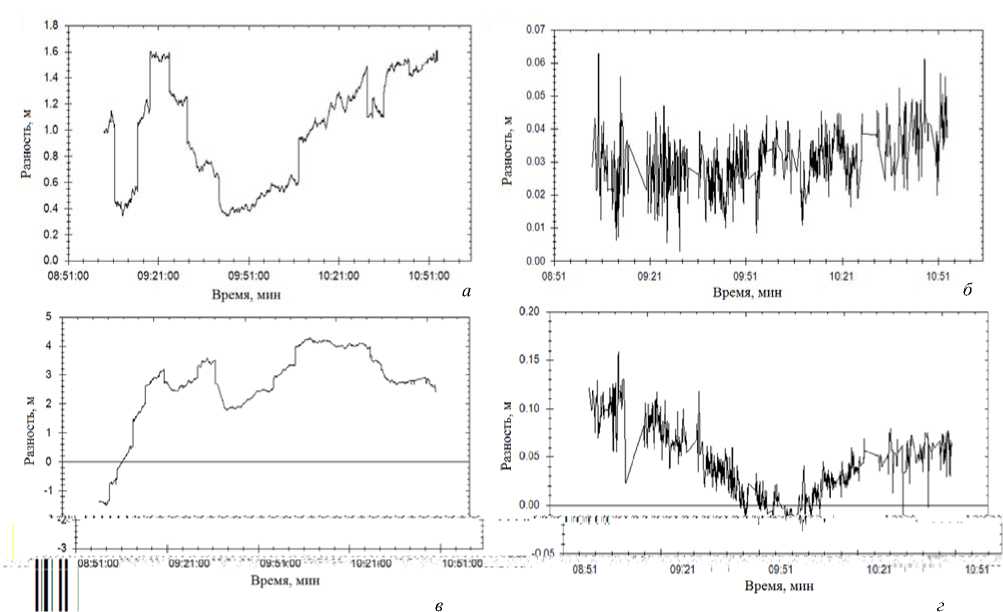
Рис. 4. Разность в оценке плановых координат ( а, в ) и высоты ( б, г ) подвижного потребителя в абсолютном режиме ( а, б ) и режиме высокоточного определения местоположения ( в, г ) относительно значений, полученных в режиме RTK
