Вывод на орбиту и сближение космического робота с геостационарным спутником

Автор: Сомов Евгений Иванович, Бутырин Сергей Анфимович, Сомов Сергей Евгеньевич, Сомова Татьяна Евгеньевна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 2 т.22, 2020 года.
Бесплатный доступ
Рассматриваются вопросы выведения космического робота на геостационарную орбиту по комбинированной схеме и его сближения с информационным геостационарным спутником. В системе управления движением робота применяются двигательная установка с 8 реактивными двигателями при широтно-импульсной модуляции значений их тяги и силовой гироскопический кластер на основе 4 гиродинов с цифровым управлением. Приводятся численные результаты, демонстрирующие эффективность разработанных дискретных алгоритмов наведения и управления.
Космический робот, выведение на орбиту, сближение с геостационарным спутником, управление
Короткий адрес: https://sciup.org/148312632
IDR: 148312632 | УДК: 629.78 | DOI: 10.37313/1990-5378-2020-22-2-124-131
Launching a space robot in orbit and approaching to geostationary satellite
The problems of putting a space robot into a geostationary orbit using a combined scheme and its approach to an information geostationary satellite are considered. The robot motion control system uses a propulsion system with 8 jet engines at the pulse-width modulation of their thrust values and a gyroscopic moment cluster based on 4 gyrodines with digital control. Numerical results are presented that demonstrate the effectiveness of the developed discrete guidance and control algorithms.
Текст научной статьи Вывод на орбиту и сближение космического робота с геостационарным спутником
Информационные спутники (связи, метеорологического наблюдения Земли) на геостационарной орбите (ГСО) имеют потребную длительность службы до 25 лет при наличии технического обслуживания с помощью космических роботов-манипуляторов (КРМ), в частности дозаправки топливом их электрореактивных двигательных установок (ЭРДУ). В современной космонавтике наблюдается регулярная тенденция к увеличению массы полезной нагрузки информационных спутников на ГСО. Ограничения на допустимую массу затрат топлива при выведении крупногабаритного космического
аппарата (КА) на ГСО приводят к проблеме «до-выведения» КА от переходной орбиты (ПО) до геостационарной с помощью бортовой ЭРДУ [1]. В этой связи проблемные вызовы состоят в использовании электрореактивной тяги при как выводе и удержании информационного спутника на ГСО, так и перелётах обслуживающего его КРМ.
Для выведения геостационарных КА применяются ракеты-носители (РН) с разгонным блоком, который способен осуществить необходимые манёвры для перевода КА с эллиптической геопереходной орбиту (ГПО) на ГСО. Такая схема требует от КА наличия собственной химической реактивной двигательной установки (ХРДУ) большой тяги (БТ), что не является эффективным решением с точки зрения стартовой массы КА: масса топлива для «до-выведения» КА на ГСО может составлять до 50 % от стартовой массы КА, в зависимости от РН и условий старта. В то же время, малая тяга электрореак-тивных двигателей (ЭРД) в составе ЭРДУ многократно увеличивает время «до-выведения» спутника, а также время нахождения КА в зоне наиболее опасного внутреннего радиационного пояса Земли на высотах полета от 2000 до 12000 км, что предъявляет повышенные требования по радиационной защите как полезной нагрузки, так и служебных систем, в том числе панелей солнечных батарей (СБ). Поэтому для успешной доставки на ГСО космического аппарата с минимальными затратами топлива за приемлемое время рационально применять комбинирован- ную схему, основанную на поочерёдной работе химической и электрореактивной двигательных установок: ХРДУ БТ используется для формирования переходной орбиты, по которой спутник быстро проходит зону внутреннего радиационного пояса Земли, а ЭРДУ – для последующего «до-выведения» спутника на ГСО.
Для реализации такой схемы в последние два десятилетия интенсивно выполнялись исследования и разработки как за рубежом [2], так в России – организациями Роскосмоса, академическими институтами и профильными университетами. Первые спутники США на базе платформы 702SP фирмы Boeing с электрореак-тивным «до-выведением» с эллиптической ГПО (400 х 63000) км были запущены в 2015 г. При этом масса ксенона, используемого для «до-выведения» указанных КА, составляла « 5 % их стартовой массы, что в десять раз меньше, чем при использовании обычной ХРДУ. АО « ИСС им. акад. М.Ф. Решетнева » также приступило к практическому решению этих проблем, здесь были проведены необходимые инженерные обоснования [3] и первые запуски – российские спутника связи Экспресс-AM5/AM6 «до-выводились» на ГСО с помощью собственной ЭРДУ в 2013-2014 гг. и 2015 г. соответственно. При этом в топливном бюджете ЭРДУ указанных КА были учтены затраты как на «до-выведение» длительностью несколько месяцев, так и на удержание этих спутников в заданных точках ГСО с эпизодической разгрузкой электромеханических приводов от накопленного кинетического момента (КМ) в течение гарантированного срока службы до 15 лет.
В статье рассматриваются три задачи: (i) выбор отечественных реактивных двигательных установок (РДУ) космического робота и анализ их топливных бюджетов для выведения КРМ с массой « 3000 кг по комбинированной схеме на ГСО с дальностью до цели 500 м; (ii) выбор структуры ХРДУ малой тяги (МТ) и электромеханических приводов системы управления движением (СУД) КРМ для выполнения его сближения с целью до дальности 100 м; (iii) синтез законов наведения и управления КРМ, нелинейный анализ динамики СУД при таком сближении.
ВЫВЕДЕНИЕ КОСМИЧЕСКОГО РОБОТА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ
В таб. 1 и таб. 2 представлены основные характеристики отечественных реактивных двигателей (РД), выбранных для применения на борту КРМ. При этом
. ХРДУ БТ реализуется одним РД ДСТ-200А при создании тяги величиной 200 Н по оси + O r у связанной с корпусом КРМ системы координат (ССК) Or xyz с началом в полюсе Or , который при исходном состоянии совпадает с центром масс робота Cr ;
-
. ХРДУ МТ строится по симметричной схеме на основе восьми РД ДСТ-25 ;
-
. ЭРДУ реализуется двумя РД СПД-140Д с общей тягой 0.58 Н по оси + O r у ССК.
Будем считать, что вывод КРМ с начальной массой m i = 6300 кг на эллиптическую ГПО (200 х 35786) км с наклонением 51.6 град выполняется запуском с космодрома Байконур посредством РН Протон-М с разгонным блоком Бриз . Применяемая стратегия последующего вывода КРМ на ГСО содержит следующие орбитальные манёвры:
Таблица 1. Характеристики химических РД КБХМ им. А.М. Исаева
|
Тип двигателя |
Уд. импульс, [м/с] |
Тяга, [Н] |
Топливо/окислитель |
Масса, [кг] |
|
ДСТ-200А |
2940 |
200 |
НДМГ/АТ |
1.7 |
|
ДСТ-25 |
2790 |
25 |
НДМГ/АТ |
0.8 |
Таблица 2. Характеристики электрореактивного двигателя ОКБ Факел
|
Тип двигателя |
Уд. импульс, [м/с] |
Тяга, [Н] |
Раб.тело |
Мощн. [Вт] |
Масса, [кг] |
|
СПД-140Д |
17363.7 |
0.29 |
Ксенон |
4500 |
8.5 |
Таблица 3. Топливный бюджет и длительности орбитальных перелётов КРМ
|
Перелётный манёвр |
V h , [м/с] |
Тип РДУ |
m w , [кг] |
m f ,[кг] |
T „ > [с ут ] |
|
|
1 a |
Уменьшение наклонения геопереходной орбиты |
1604 |
ХРДУ БТ |
2650 |
3650 |
4-8 |
|
1 b |
Подъём перигея ГПО до 10000 км |
307 |
ХРДУ БТ |
362 |
3288 |
1 |
|
2 |
Переход КРМ на ГСО в окрестность цели с дальностью 500 м |
773 |
ЭРДУ |
270 |
3018 |
122 |
|
3 |
Сближение КРМ с целью до дальности 100 м |
21 |
ХРДУ МТ |
24 |
2994 |
≈ 0.02 |
-
1. переход КРМ на ПО с помощью ХРДУ БТ при последовательном выполнением этапов (1 a ) обнуления наклонения ГПО и (1 b ) подъёма её перигея до 10000 км;
-
2. переход КРМ с промежуточной орбиты на ГСО с использованием ЭРДУ с дальностью до цели (геостационарного спутника) 500 м;
-
3. переход КРМ с использованием ХРДУ МТ в окрестность цели с дальностью 100 м.
Оценки изменения массы КРМ и длительности его перелетных манёвров, полученные на основе известных методов динамики управляемого космического полёта, приведены в таб. 3, где V h – характеристическая скорость манёвра, m w – затраты топлива (рабочего тела), m f – масса КРМ при завершении манёвра, T m – его длительность. Здесь проблемные вызовы состоят в энергообеспечении ЭРДУ при наведении крупногабаритных панелей СБ на Солнце, в управлении как ориентацией КРМ, так и ЭРДУ с минимизацией затрат её рабочего тела при орбитальном перелёте.
СТРУКТУРА ПРИВОДОВ СУД
Представленная на рис. 1 схема ХРДУ МТ строится на основе восьми РД ДСТ-25 по симметричной схеме с широтно-импульсной модуляцией (ШИМ) тяги 25 Н каждого РД и позволяет одновременно создавать векторы импульсов внешней силы и внешнего момента произвольных направлений в ССК космического робота.
На рис. 2 приведена минимально-избыточная схема силового гироскопического кластера (СГК) на основе четырёх гиродинов (ГД), которая далее используется при значении собственного КМ h g = 100 Нмс каждого ГД.
Отметим, что здесь можно применить и кластер четырёх двигателей-маховиков по схеме General Electric , однако СГК имеет ряд динамических преимуществ при решении основных целевых задач КРМ.
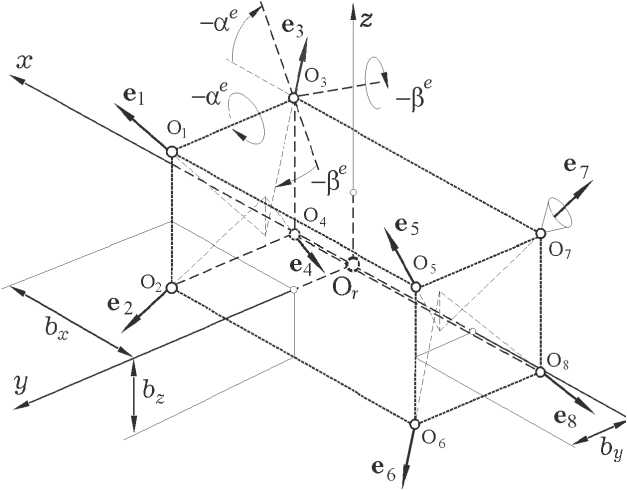
Рис. 1. Схема РДУ на осно в е 8 РД мал о й тяги
МОДЕЛИ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ
Для описания перемещения центра масс КА и его углового движения применяются геоцентрическая экваториальная I ⊕ и солнечноэклиптическая I s инерциальные системы координат (ИСК). В ИСК I ⊕ ( O ⊕ XiYiZi ) орт e s направления из центра Солнца к центру Земли O ⊕ имеет вид e sI( t ) = [ -ε e]1 [ -ρ s( t )] 3 {1,0,0} , где ε e представляет угол наклона оси вращения Земли к плоскости эклиптики, Р , ( t ) = р ” +® s( t - t о ) , Р 0 = Р s ( 1 0 ) • 1 0 - некоторый начальный момент времени, ω s – средняя угловая скорость обращения Земли вокруг Солнца. Здесь и далее используются общепринятые обозначения col( ⋅ ) = { ⋅ } , line( ⋅ ) = [ ⋅ ] , 〈⋅ , ⋅〉 , ( ⋅ )t , [ a × ] и о ,~ для векторов, матриц и кватернионов, матрицы [ α ] i элементарного поворота вокруг i -ой оси на угол α , i = 1,2,3 ≡ 1 ÷ 3 , а также C α ≡ cos α , S α ≡ sin α и дискретные значения вектора x ( tk ) ≡ x k , k ∈ N0 ≡ [0,1,2,...) .
Используется Гринвичская система координат (ГСК) G ⊕ , связанная с Землей, которая вращается с угловой скоростью ω e . Положение ГСК G ⊕ относительно ИСК I ⊕ определяется углом ρ e ( t ) = ρ e 0 +ω e( t - t 0) , где ρ e 0 = ρ e ( t 0 ) – угловое положение Гринвичского меридиана относительно направления на точку весеннего равноденствия Y при 1 = 1 0 и to e - модуль вектора ю е = {0,0, to e} угловой скорости вращения Земли.
Орбитальная система координат (ОСК) O (O x o y o z o) КА с ортами o 1 , o 2 , o 3 имеет следующие направления осей и связанных с ними ортов: ось O x o и орт o 1 совпадают по направлению с ортом r o вектора r ^ ( t ) расположения центра масс КА в ИСК I ⊕ ; ось O z o и орт o 3 = n o направлены по нормали n o к плоскости орбиты; ось O y o с ортом o 2 = τ o при трансверсали τ o , перпендикулярной оси O x o . Вектор угловой скорости ω o орбитального движения КА в ОСК определяется как to o = to o ( 1 ) n o = V ( 1 ) n o , где истинная аномалия ν ( t ) отсчитывается от перигея орбиты π .
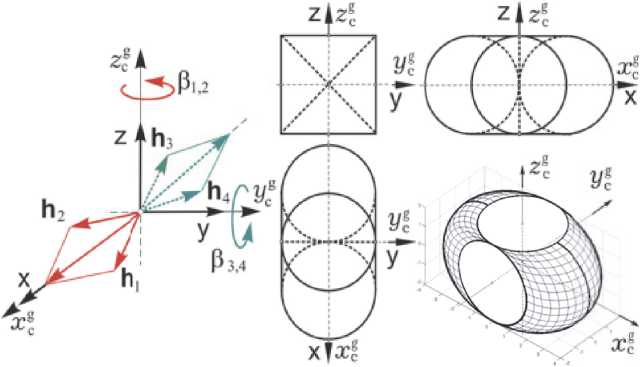
Рис. 2. Схема СГК на основе 4 гиродинов
Если считать КА твёрдым телом с массой m и тензором инерции J , то при стандартных обозначениях модель его пространственного движения в ИСК, но в проекции на оси ССК O xyz с полюсом O , совпадающим с центром масс C , имеет вид
г * - и х r = v ; m( v * + и х v ) = P e + F d;
Л = Л о to/2; J с + их G = Mg + Me + Td.
представляется нелинейным соотношением ■
M k ( t ) = — h g A h ( P ( t ) u k ( t ) ; P ( t ) = u k ( t ) , где вектор-столбец p = {p p } и матрица Якоби a h ( p ) =d h ( p ) /ap .
НАВЕДЕНИЕ ПРИ СБЛИЖЕНИИ КРМ С ГЕОСТАЦИОНАРНЫМ СПУТНИКОМ
Здесь кватернион Λ представляет ориентацию КА в ИСК, вектор G = J ω + H , где H является вектором кинетического момента СГК, векторы P e , M e и M g = — H представляют соответственно управляющие силы РДУ, моменты РДУ и СГК, F d и T d - векто-
ры внешних возмущающих сил и моментов, представленных в ССК, и используется символ ( • ) * локальной производной по времени. Кватерниону Л = ( X 0 , X ) , Х = { X i } , соответствует матрица C ( Л ) = I 3 — 2[ X x ] Q t ( X ) , где Q ( X ) = I 3 X0 + [ X x ] . Ориентация ОСК в ИСК определяется кватернионом Л 0 с уравнением
Л 0 = Л 0 о Ю 0/2 .
В схемe ХРДУ МТ на рис. 1 положения ортов e p , p = 1 ^ 8 по осям сопел РД определяются углами a e, P e • Вектор р p точки O p приложения вектора тяги p -го РД определяется параметрами bx , b y , bz • Каждый РД имеет ШИМ тяги pp ( t ) с нелинейным непрерывно-дискретным описанием
pp ( t ) = P m PWM( t — TU ,ts T m ,V pr ) V t E [ ts , ts + 1 ) при периоде T U и запаздывании T u . Здесь Pm является номинальным значением тяги, одинаковым для всех РД, ts + 1 = ts + T U , t s = sT U; , s e N0 = [0,1,2,...) и функции
PWM( t,t s , T m ,V ps ) =
/ signv ps 0
t G [ Ms + T ps X t G [ t s + T ps , t s + 1X
t (t ) = ps m
<
M TZ,\v
ps
\)
\ V ps I - T m ; \ V ps \ > T m •
В ССК векторы тяги восьми РД вычисляются по соотношению p p = - pp e p , а векторы тяги P e и момента M e РДУ - по формулам P e = S p p ( t ) и M e = E [ p p X ] p p ( t )•
Столбец H ( P ) = hg 2 h p ( в p ) представляет вектор КМ СГК (рис. 2), где | h p | = 1 , p = 1 ^ 4 и hg является постоянным собственным КМ каждого ГД. Считая близкими командные u p и фактические в p ( t ) угловые скорости ГД, при цифровом управлении u g ( t ) = {и р д ( t )}, ugpk ( t ) = u pk V t e [ tk , tk + 1) в моменты времени t k = kTu с периодом Tu , tk + 1 = tk + T , k E N0 , вектор M g = {M g } управляющего момента СГК
Будем считать, что в некоторый начальный момент времени t i в ИСК известны значения векторов расположения и скорости поступательного движения КРМ r r ( t i ) , v r ( t i ) (нижний индекс r , robot ) и цели r t ( t i ) , v t ( t i ) (нижний индекс t , target ). По значениям векторов r t ( t i ) , v t ( t i ) на основе известных соотношений [4] выполняется прогноз расположения r t ( t ) = r t p ( t ) и скорости v t ( t ) = v p ( t ) полюса O t цели на интервале времени t e [ t i , t f] заданной длительности Tm = t f — t i , а также значения векторов r t ( t f) и v t ( t f) в момент времени t f .
При введении опорной круговой орбиты радиуса rr (ti) = const в плоскости земного экватора удобно рассматривать движение КРМ в малой окрестности такой орбиты с использованием цилиндрической системе координат (ЦСК) [4]. Здесь координатами являются значения радиали r и угла u её отклонения от произвольного направления, например от оси OeX1 ИСК, в плоскости опорной орбиты, а также значения бокового смещения z в направлении, ортогональном этой плоскости. Для принятой опорной орбиты координаты и скорости поступательного движения КРМ в ИСК определяются соотношениями г, ={rCu; rSu; z}; (2) vr = {r Cu - rSu ii; r Su + rCuii; Z}^
Пусть w r , w t и wz представляют соответственно радиальную, трансверсальную и боковую компоненты вектора управляющего ускорения при движении КРМ, а µ – гравитационный параметр Земли. Синтез закона наведения КРМ при поступательном манёвре его сближения с геостационарным КА (рис. 3) в центральном гравитационном поле на интервале времени
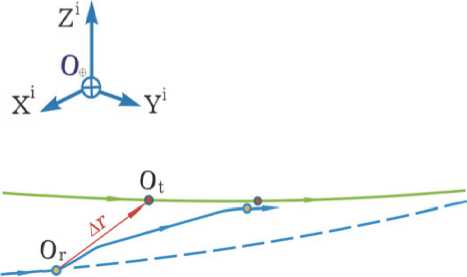
Рис. 3. Схема сближения КРМ с КА на ГСО
t e [ t i , t f ] выполняется для модели движения космического робота
-
2 2 r,
-
r — ru + ц / r = w ;
rU + 2 ru = w ; (3)
-
3 z
z + Ц z/r =w при краевых условиях по орбитальным переменным в ЦСК в виде vr (tд = ( vr (tJ, er> ,V (tf) = (v t (ta, er>;
V(t i ) = < v r ( t J, e t > , V ( t f ) = ( v t(t f ), e f > ;
v z ( t i ) = < v r ( t i ), e Z > , v z ( t f ) = ( v t ( t f ), e f > ;
u ( t i ) = ф^ u ( t f ) = ф i + arccos( ( e r , e f > ), где орты e с различными индексами вычисляются по соотношениям
-
< = r r ( t i) / r r ( t i) ; e f = г ( t a / r t ( t f) ;
-
e = v r ( t i)/ vr ( t D; e f = v t ( t f)/ v t ( t f );
Список литературы Вывод на орбиту и сближение космического робота с геостационарным спутником
- Spitzer A. Near optimal transfer orbit trajectory using electric propulsion. Proceedings of AAS/AIAA Spaceflight Mechanics Conference. Albuquerque. 1995, 95-215, pp. 1-10.
- Gelon W., Kamel A., Stratemeier D., Hur-Diaz S. Practical orbit raising system and method for geosynchronous satellites. US Patent no. 7113851, 2006.
- Яковлев А.В., Внуков А.А., Баландина Т.Н., Баландин Е.А., Тарлецкий И.С. Выведение космического аппарата на геостационарную орбиту комбинированным методом // Вестник СибГАУ. 2016. Т. 17. № 3. С. 782-789.
- Эльясберг П.Е. Введение в теорию полета искусственных спутников Земли. М.: Наука, 1965. 540 с.
- Сомов Е.И., Бутырин С.А., Сомова Т.Е. Сомов, С.Е. Автономное наведение и управление ориентацией космического аппарата в режиме слежения // Известия Самарского научного центра РАН. 2019. Т. 21. № 5. С. 96-107.
- Тучин Д.А. Автономное определение орбиты на борту космического аппарата // Препринты ИПМ им. М.В. Келдыша. 2019. № 7.
- Somov Ye., Butyrin S., Somov S. Guidance, navigation and control of a free-flying robot during its rendezvous with a passive space vehicle. Mathematics in Engineering, Science and Aerospace. 2018. Vol. 9, no. 3, pp. 387-396.
