Вывод уравнений движения механизма с четырьмя степенями свободы при ударном нагружении

Автор: Егодуров Г.С., Бочектуева Е.Б., Хараев Г.И.
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Статья в выпуске: 6 (45), 2013 года.
Бесплатный доступ
В статье излагается вывод уравнений движения батанного механизма ткацких станков типа АТ при ударе в обе замочные пружины с учетом крутильной упругости коленчатого вала и изгибной упругости бруса батана. Динамическая модель механизма представлена как шестимассовая система с четырьмя степенями свободы.
Батанный механизм, удар, замочная пружина, упругость, коленчатый вал, брус батана, динамическая модель, масса, степень свободы
Короткий адрес: https://sciup.org/142142794
IDR: 142142794 | УДК: 620.10
The motion mechanism equation with four degrees of freedom under shock loading
The article describes the sley motion equation of AT looms under impact on both lock springs with torsional elasticity of the crankshaft and bending elasticity of the sley. The dynamic model of the mechanism is presented as six-mass system with four degrees of freedom.
Текст научной статьи Вывод уравнений движения механизма с четырьмя степенями свободы при ударном нагружении
В работе [1] исследован установившийся режим движения батанного механизма ткацких станков типа АТ с учетом упругости коленчатого вала и бруса батана, а в данной работе рассматривается удар батана в замки (рис. 1 a) – мгновенный останов машины на полном ходу при максимальной скорости батана по требованиям технологии ткачества [2]. При этом из-за упругости звеньев механизма удар начинается с левой замочной пружины механизма (рис.1 b). Этот процесс условно можно разделить на следующие основные этапы: 1) движение механизма при сопротивлении левой замочной пружины до начала удара в правую замочную пружину; 2) движение механизма при сопротивлении обеих замочных пружин: а) до крайнего переднего положения механизма; б) в обратном направлении до нарушения контакта с правой пружиной; 3) последующее движение механизма, состоящее из ряда этапов, носящее затухающий характер в силу рассеивания энергий.
Наибольшие усилия в звеньях механизма при ударе в замки появляются во время второго этапа в крайнем переднем положении механизма, поэтому здесь исследуются только первые два этапа. Начальными условиями при рассмотрении этих этапов соответственно являются конечные условия установившегося движения перед началом удара батана в замки и конечные условия первого этапа. При решении задачи удара местные деформации соударяющихся звеньев механизма считаются малыми и не учитываются, учитываются только общие деформации упругих звеньев: коленчатого вала, бруса батана и замочных пружин.
Рассмотрим движение батанного механизма во время удара в обе замочные пружины с учетом крутильной упругости коленчатого вала между кривошипами и изгибной упругости бруса батана между шатунами [1]. Принятая динамическая модель механизма приведена на рисунках 1 b, c и представляет собой шестимассовую систему с четырьмя упругими звенья- ми, имеющую четыре степени свободы и отличающуюся от расчетной схемы установившегося движения тем, что на нее дополнительно наложены две упругие связи (замочные пружины) и отключен двигатель станка.
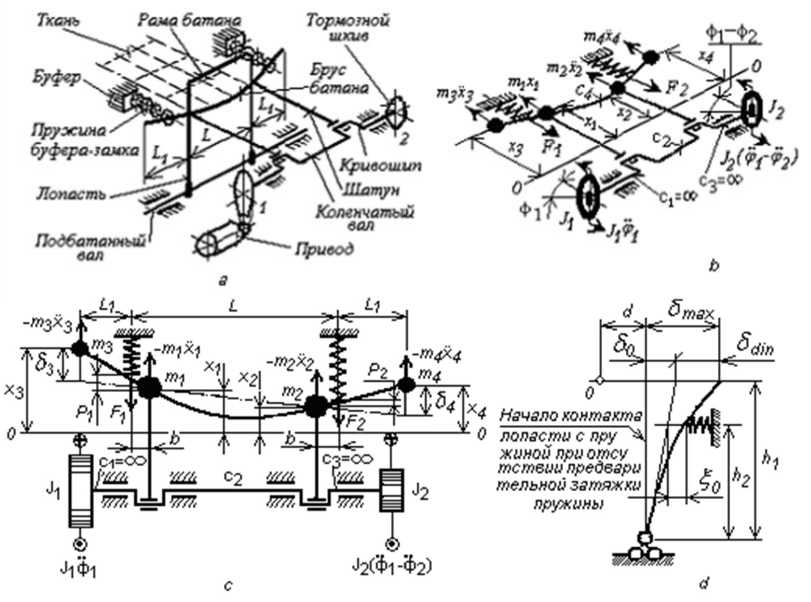
Рис.1. Принципиальная схема ( a ) и динамическая модель батанного механизма в момент начала удара в замки (b, c) и деформация лопасти (d)
Если в расчетной схеме (рис. 1 b, с) положить F 2 = 0, то получим расчетную схему для первого этапа удара в замки. Хотя система имеет четыре степени свободы и ее положение в любой момент времени вполне определяется четырьмя обобщенными координатами, удобно при выводе уравнений, описывающих движения масс системы, пользоваться шестью координатами по количеству масс. Поскольку установившееся движение и удар батана в замки являются непрерывным процессом, то для математического моделирования удара используется та же система координат, что и в работе [1]: х 1 , х2, х3, х4 - перемещение соответствующей массы от ее заднего крайнего положения 0 - 0 в момент начала движения (рис. 1 b, c); Ф 1 - угол поворота левого кривошипа; ф 2 - упругий угол поворота правого кривошипа относительно левого за счет упругости коленчатого вала. Массы m 3 и m 4 являются приведенными массами при рассмотрении свободных колебаний рамы батана [3].
Остальная масса рамы батана с соответствующим приведением включена в массы m 1 и m 2; J 1 и J 2 - соответственно приведенный момент инерции деталей механизма, связанных с левым и правым концом коленчатого вала; F 1 и F 2 - приведенные к оси бруса батана силы упругости пружин и лопастей; c 2 - коэффициент крутильной жесткости коленчатого вала между кривошипами; c 4 - изгибная жесткость бруса батана; R - радиус кривошипа; l - длина шатуна; L - пролет бруса; L 1 - длина консоли бруса. Принято m 1 = m 2 = const, m 3 = m 4 = const, J 1 = const, J 2 = const .
Ударная нагрузка воспринимается буфером, пружина которого имеет предварительную затяжку [2]. Для вывода уравнений движения механизма необходимо предварительно найти приведенную к оси бруса силы упругости пружин и лопастей F1 и F2 . Перемещения точек h приложения сил Fi и F2 (рис. 1 d) равны 5тях = 5iiп + 5q, где 50 = — ^ - заданная величина max n 0 h2 0
перемещения точек F 1 и F 2 за счет предварительной затяжки пружины ^ 0 . Динамические деформации лопасти и пружины 5 din имеют вид:
|
принимают вид: |
b b h 1 5 1max = (1 - y) X1 + yX 3 + y^0 - d 1 ; L 1 L 1 h 2 b b h 1 5 2max (1T ) X 2 + TX 4 + , ^ 0 d 2 . L 1 L 1 h 2 |
Формулы для определения силы упругости F 1 и F 2 , приведенные к оси бруса, имеют
|
вид: |
F = [(1 - b- ) x , + bx з + i , - d ; L 1 L 1 h 2 F 2 = [(1 - b ) x 2 + bx 4 + hL^, - d 2 ] c „, . L 1 L 1 h 2 |
Жесткость замочной пружины и лопасти, приведённые к оси бруса батана, определяется выражением:
Движение массы m 1 (рис. 1 b, с) от ее крайнего заднего положения описывается уравнением:
|
R 2 X 1 = R (1 - cos Ф 1 ) - "^s^n Ф 1 . (1) |
Движение массы m 2 (рис. 1 b, c) описывается уравнением:
|
R 2 R 2 x 2 = R (1 - cos Ф 1 ) - "^"sin2 Ф 1 - ( R sin Ф 1 - ”2/” sin 2 Ф 1 ) Ф 2 . (2) |
Рассмотрим движения масс коленчатого вала (рис. 2 b) с моментами инерции J 1 и J 2 , которые описываются уравнениями:
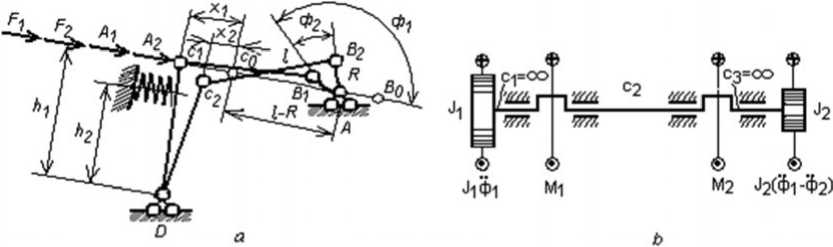
Рис. 2. Расчетная схема кривошипно-шатунного механизма ( а ) и коленчатого вала ( b ) в момент начала удара
Моменты M 1 и M2 выражаются через реактивные силы A1 и A2 бруса батана на четы- рехзвенник (рис. 2 а) на основании принципа возможных перемещений:
R 2
М i = A i ( R sin ф - -^- sin 2 ф 1 )
R 2
M 2 = A 2 ( R sin Ф 1 --sin 2 0 i
Реакции A 1 и A 2 определяются из условия равновесия бруса батана, находящегося под действием сил инерции приведенных масс и приведенных к оси бруса сил сопротивления замочных пружин и лопастей F 1 и F 2 (рис. 2 а ):
После подстановки выражений (4) в соотношения (3) с учетом (5) уравнения движения масс коленчатого вала принимают вид:
ф 1 + А ф 2 + ( B1x + D 1 X 3 - E 1 X 4 + P 1 x 1 - G 1 x 2 + H 1 x 3 - K 1 x 4 +

R 2
+ N 1 )( R sin ф 1 - —sm2 ф 1) = 0
ф 2 + N2 ф 2 - ф 1 - ( P2X2 - Q 2 X 3 + S 2 X 4 - T2x 1 + U 2 x 2 + V2x 3 + W2x 4 +
R 2
+ G 2)( R sin ф1--sm2ф1) = 0, где
A = c2- ; Bx = m 1; D = (1 + R) m3. ; E = b m
J 2 1 J 1 1 L J 1 1 L J 1
G = (1 — b ) ЬСп^ ; H = (1 + Ь ) ; К =
-
1 L 1 L J 1 1 L L 1 J 1 1
^ p = (1 + Ь )(1 — b ) ^; P 2 = m 2 ; 12
1 L L 1 J 1 J 2
J2- c р ; N = ( R ^ — d ) ^;
LL 1 J 1 1 h 2 0 1 J 1
—
N 2 = C ; Q 2 = LT m 3- ; 5 2 = (1 + L 1) m 4 ; T = (i — b ) b' п ; и 2 = (1 + Ь )(i — b ) С р ;
J2 L J2 L J2 L1 L J2 LL
V = b c р; W = (1 + b) bCp ; G = (hL b — d ).
-
2 LL1 J2 L L1 J2 2 h2 02
Уравнения движения масс m 3 и m 4 составляем следующим образом. Как видно из рисунка 1, брус батана под действием приложенных сил деформируется. Перемещение массы m 3 можно записать в виде:
единичные силы направлены вдоль этих перемещений; 53F и 53F2 — соответственно перемещение массы m3 под действием силы F1 = 1 и F2 = 1 (направления сил показаны на рисун ке 1 b). Соответствующая величина 53 находится из геометрических соотношений где
L
5 3 = x 3 + ™ x 2
— С — "L 1 ) x 1 .
Приравнивая (7) и (8) с учетом (5), получим уравнение движения массы m 3 : x 3 + A 3 x 3 + B 3 x 4 — D 3 x 4 + E 3 x 2 — P 3 x 1 = G 3 ,
L 1 5 3 F 1 bc np 5 34 m 4
A 3 =--------------; B 3 = ------
5 33 m 3 L 1 5 33 m 3
(1 + ) + 5 3 F 1 (1 — "c") c np
P 3 =---- L------------L 1-----;
5 33 m 3
L 2
b c пр L
; D 3 = 5 3 f2 7 7---- ; E 3 = —
2 L 5 33 m 3
—
5 3 F 2 (1 — b ) C np
L 1 ;
5 33 m 3 ’
G 3 = ( 5 3 F + 5 3 F 2)(71 b o — d 1 ) np
1 2 h 2 5 33 m 3
Аналогично находим уравнение движения массы m 4 :
x 4 + H 4 x 4 + К 4 x 3 — M 4 x 3 — N 4 x 2 — P 4 x , = Q 4 ,
где
L — 5f bc, H = 1 4 F 2
5 44 m 4 b 1
' 5 m пр-; К = Tm; M 4 = 54 F
5 44 m 4 '
bc
—n— ; N 4 = b 1 5 44 m 4
(1 + L) — 5 4 f 2 (1 — b) ) c-
5 44 m 4
пр
;
P4 =
ь — 5 . ,(1 — b ) c „p
5 44 m 4
Q , = ( 5 4 F, + 5 4 F, )( h 1 b o — d 1 ) Ь пр
1 2 h 2 5 44 m
Из выражений (1) и (2) имеем:
|
;x j = ( R sin 0 j x = ( R cos ф 1 |
R 2 - — Sin 2 ф ! ) ф ! R 2 —— cos2 ф 1) ф 1 + ( R sin ф 1 |
R 2 — "2Г ^^ 2 ф 1 ) ф 1 |
||||
|
5c 2 = ( R sin ф1 |
R 2 — ”27 sin 2 ф 1 ) ф 1 — ( R cos ф 1 " |
R 2 - — СО82 ф 1 )< ф 1 ф 2 |
— ( R sin ф 1 |
R 2 — "2 /"^^ 2ф 1 ) ф 2 |
(14) |
|
|
x2 = [( R sin ф 1 |
R 2 — ~2Гsln2 Ф 1) — ( R cos ф 1 — |
R 2 && 1 соз2 ф 1 ) ф 2 ] ф 1 |
- ( R sin ф 1 - |
R 2 - — sm 2 ф 1 ) ф 2 + |
||
|
+ [( R cos ф 1 — |
R 2 R 2 — cos2 ф 1) + ( R sin ф 1 — — |
2 sin2 ф 1) ф 2] ф 1 — 2( R cos ф 1 — |
R 2 & & cos2 ф 1 ) ф 1 ф 2 l |
|||
После преобразования выражений (6), (9), (11) с учетом (1), (2) и (13) получаем следующую систему нелинейных дифференциальных уравнений второго порядка с переменными коэффициентами [4], описывающих движения масс расчетной схемы механизма при ударе в обе пружины замка:
( . R 2 . I
1 + B] R sin ф --sin 2 ф I
1 к 1 2 1 17
х ф^ + A + P 5 R sin ф 1
к
ф 1 + B 1 • R cos ф 1
R 2 • о 1 — — 81п2 ф 1 7
• x 4 + ^ U 5 • R • (1 - cos ф 1)
R
—
—
к
R 2 i( - — cos 2 ф 1 I R sin ф 1
ф 2 + S 5 R sin ф 1 к
1 7
—sin2 ф 1 + V 5 >• R sin ф 1
2 l
к
—
. „ L . R R .
1 + P 2 R sin ф 1 — —sin2 ф 1
•• ф 2 +
к
R
\
—
• B 1 —
R I
--sin 2 ф 1 х
2 1 1 J
/
R 2
—sin2 Ф 1 I - x 3 + T R si n ф 1
2 1 7 5 к
R 2
--sm2 ^
2 l 1
—
R 2 1
— sin 2 ф I = 0, 2 1 1 7
( R2
1 + B[ R sin ф --sin2 ф1
1к 1 21 -
R
(
1 + P 2 к
к
R
R 2
R sin ф 1 — —sin 2 ф 1
к
R cos ф 1 --cos2 ф 1 ф 2 R sin ф 1 --sin2 ф 1 R cos ф 1--cos2 ф 1 ) •
к
l
_к
2 l
l
R
P 2 R cos ф 1--cos2 ф 1 + R sin ф 1
^
к
_к
(
+ 2 P 2 R cos ф 1
к
R
^
х <
1 + P 2
l
к
— cos2 ф 1 R sin ф 1
l
г
R sin ф 1 к
—
R 2
2 1 sin 2 ^ 1
к
—
^
R
2 R2 . . )
—— sin2ф1 ф2
1 7
к
— sin2 ф 1 ф . ф 2 +
2 l
R
Rsin ф 1--sin2 ф 1 <ф +
к
2 l
(
х A + A5 • R • sin ф1 к
R 2
---sin 2 ф 2 • 1 1
(
R cos ф 1 к
к21 Г
—
R 2 l
к
1 + B 1 R sin ф 1 к
1 С
—
R 2
— sin 2 ф
2 l 1
•
cos2 ф 1 • ф 2 • R sin ф 1
—
к
R 2
2 1 sin 2 ^ 1
х
+ N 2 + B 5 •к R • sin ф 1
R 2
---sin 2 ф 2 • 1 1
ф 2 +
+
1 + Bx R sin ф к
Г
—
R2 ■ . ) 2 2^ 81п2 ф 1
•
<1 + P2
(_ . R2 .
R sin ф 1 ——Sin2 ф 1
_к 21
л
—
R cos ф — к
R 2
cos l
2 Ф 1
х ф 2 ]• R sin ф к
R
+
—
— sin2 ф 1 • D 5 + E 5 >•
21 7
(
R sin ф 1 — к
л
R 2
— sin2ф1 x 4 +
21 7
1 + B R sin ф к
R 2
--sin 2 ф
2 l 1
• < 1 + P 2
(
R sin ф 1 — к
R 2
—sin 2 ф
2 l 1
л
—
(
R
к
cos ф 1 —
R 2
cos l
2 Ф 1 •
х ф2 ] • R • sin ф1 к
R 2
---sin 2 ф 2 • 1 1
к
+
(
1 + B 1 R sin ф 1 к
R 2
— -^ ™2 ф ,
R 2
——cos2 ф 1) • ф 2] • ( R sin ф 1 —
+ M 5 • R • (1 — cos ф 1 )
—
a 3 X 3 + b3 x 3 — c 3 x 4
-
a 4 X 4 + b 4 x 4 —
• F5 7
—
G 5 f • R • sin ф 1
—
к
R 2
--sin 2 ф 2 • 1 1
к
• X 3 + 7
• <
1 + P2 •
(
R sin ф 1 — к
R 2 "^ ф
к
— ( R cos ф 1
—
R 2
— sin 2 Ф 1 ) • Ш5 • [ R • (1 — cos Ф 1 )
R 2
--sin ф + N
2 1 1 5
( d3 R sin ф
к
-
—
R 2
— sin ф I + K, +
2 l 1 5
cx + d4 R sin ф к
—
( . R2 . 2
R • sin ф---sin 2ф к 21
R 2 ) .Г™ R .2
—81п2 ф 1 1 ф 2 + § 3 R (1 - С08 ф 1 ) - 2^- sin ф 1 = q 3
R 2 . . ) . . R .2
— sm2 ф 1 ф 2 + 5 4 R (1 — С0S ф 1) — —sin2 ф 1 = q 4 .
> •
= 0
R
2 l
R
2 l
2 l
Начальные условия при t = 0 (получены в работе [1]:
Ф1 = 1,9198 рад x3 = 0,09156517м
Ф 1 = 26,2
с
X3 = 2,0826885 м
с
ф 2 = — 0,000758 рад ф 2 = — 0,210545
с x4 = 0,09166565м X4 = 2,0608894 м
В заключение отметим, что выведены уравнения движения батанного механизма с учетом упругости звеньев при ударном нагружении как шестимассовой системы с четырьмя степенями свободы. Общее решение полученной системы нелинейных дифференциальных уравнений второго порядка с переменными коэффициентами неизвестно, и, следовательно, для ее решения необходимо воспользоваться численными методами интегрирования на ЭВМ [5]. Результаты решения дифференциальных уравнений движения батанного механизма будут проанализированы в следующей статье.
