Задача преследования объекта с поверхности, расположенной над поверхностью преследуемого

Автор: Дубанов Александр Анатольевич
Рубрика: Инженерная геометрия и компьютерная графика
Статья в выпуске: 2 т.19, 2019 года.
Бесплатный доступ
Целью настоящей статьи является описание математической модели задачи преследования в случае, когда преследуемый и преследующий объекты движутся по разным, расположенным одна над другой, поверхностями. На рассматриваемых поверхностях в точках расположения объектов вводятся ортонормированные динамические базисы, которые определяются векторами скоростей и нормалей к поверхностям, и выполняется построение касательных плоскостей. На каждую указанную плоскость проецируются координаты оппонента нашей модели для анализа и принятия решения. Скорости объектов в модели являются постоянными по модулю величинами. Инертность объектов моделируется при помощи угловой скорости вращения, что является существенным в описываемой модели. В результате исследований получен итерационный алгоритм, приводящий к достижению порогового значения в горизонтальной плоскости проекций. По результатам исследований произведена динамическая визуализация задачи преследования, что придало наглядность полученным результатам.
Задача преследования, эквидистантная поверхность, динамический локальный базис, модель поведения, моделирование поверхностей, моделирование траекторий, плоскости проекций, направление движения
Короткий адрес: https://sciup.org/147232139
IDR: 147232139 | УДК: 004.02 | DOI: 10.14529/build190211
The task of pursuing an object from the surface located above the surface of the pursued
The purpose of this article is to describe a mathematical model of the pursuit problem in the case when the pursued and pursuing objects move along different surfaces placed one above the other. Orthonormal dynamic bases, which are determined by the vectors of velocities and normals to the surfaces, are introduced on the surfaces under consideration at the points where objects are located, and the construction of tangent planes is performed. Coordinates of our model's opponent are projected onto each specified plane for analysis and decision making. Velocities of objects in the model are constant in their magnitude. Inertness of objects is modeled using the angular velocity of rotation, which is essential in the described model. As a result of the research, an iterative algorithm leading to achievement of the threshold value in the horizontal plane of projections has been obtained. According to the research results, a dynamic visualization of the pursuit task has been made, which provides visibility to the results obtained.
Текст научной статьи Задача преследования объекта с поверхности, расположенной над поверхностью преследуемого
Задача преследования как область теории дифференциальных игр возникла как необходимость разработок приложений в военном деле. Первые труды в этой области связаны с работами Р. Айзекса, Л.С. Понтрягина, Н.Н. Красовского, Л.А. Петросяна. Дальнейшее развитие основоположников теории дифференциальных игр привело к развитию приложений на плоскости («катер-торпеда») и в пространстве (самолеты) с различными модификациями задач. Мы в своей работе провели компьютерное моделирование задачи преследования, когда объекты находятся на поверхностях, расположенных одна над другой. Современное состояние IT-технологий позволяет производить моделирование поверхностей для этой задачи, мощность и миниатюризация современных микропроцессоров позволяют в режиме реального времени производить расчет координат дронов и мобильных роботов по разработанным алгоритмам. Современные средства коммуникаций позволяют производить требуемый обмен данными в поставленной задаче. Состояние компьютерной графики позволяет выполнить визуализацию процесса преследования. В этой связи мы считаем, что такая постановка задачи может обладать новизной и актуальностью.
Постановка задачи
В данной статье рассматривается задача преследования, когда преследуемый объект («Кролик») передвигается по поверхности P r ( u , v ) . Преследующий объект движется по поверхности P f ( u , v ) . Пусть R r ( T ) – точка положения «Кролика» на поверхности P r ( u , v ) , в момент времени T , а R f ( T ) - точка положения «Лисы» на поверхности P f ( u , v ) в тот же момент времени. В точках 7— r ( T ) и R f ( T ) поверхностей P ( u , v ) и P f ( u , v ) , соответственно, построим динамические локальные базисы ^ E 1 E — 2 E — 3 J и ^ Q — 1 Q — 2 Q — 3 J (рис.
-
— 1 dR r ( T ) — 1 dR f ( T )
-
1) . Где E i = - и Q i = . Где V r
Vr dT Vf dT и Vf – постоянные по модулю скорости «Кроли- ка»
и «Лисы».
—* n f
—
Q 2
в точках
——
E 3 и Q 3 - единичные нормали n r ,
Rr ( T ) и I* f ( T ) . И E — 2 = E — 3 x E — 1 ,
= Q 3 x Q 1 .
Далее, будем считать, что плоскость Σ обра- зована векторами E1 и E2 , а плоскость П – векторами Q1 и Q2 . Для выбора решения «Кроликом»
нам надо спроецировать точку R f на плоскость Σ и получить ее проекцию R' f для анализа, на предмет из какой четверти плоскости Σ приближается проекция «Лисы». Точно так же для принятия решения «Лисой» необходимо спроецировать точку Rr на плоскость П, получить ее проекцию R'r , для того чтобы проанализировать, в какой четверти плоскости П она находится.
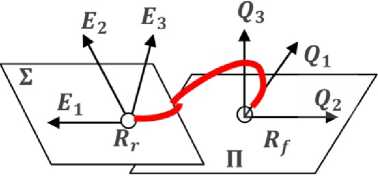
Рис. 1. Динамические базисы
Итак, целью статьи является детальная разработка алгоритма и написание программы в системе компьютерной математики «MathCAD» для указанной выше задачи преследования.
Моделирование поверхностей
Моделирование поверхности Pr ( u , v ) , по которой движется «Кролик», производится заданием точек линий горизонталей в среде «AutoCAD» с последующей полиномиальной регрессией в среде «MathCAD» при помощи встроенных функций математического пакета. На полученной после полиномиальной регрессии поверхности вводится равномерная сетка с расчетом частных производных в узлах сетки.
С моделью поверхности, по которой движется «Лиса», в нашей программе дело обстоит так. К поверхности «Кролика» Pr ( u , v ) строится эквидистантная поверхность (рис. 2) P ( u , v ) = = Pr ( u , v ) + A R • nr , где A R - расстояние, на которое эквидистантная поверхность отстоит от исходной.
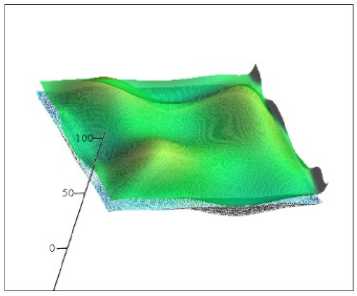
Рис. 2. Эквидистантная поверхность
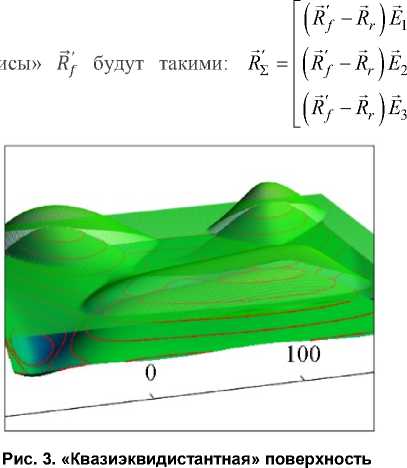
Потом вводится горизонтальная плоскость z = r 0 , и поверхность P f ( u , v ) составляется следующим образом:
P f ( u , v ) = <
z , если P e ( u , v ) z < r o ; ? ?
_Pe (u,V),еслИ pe (u,V)z > ro, где r0 – некоторое пороговое значение высоты
(рис. 3). После этого на поверхности Pf (u, v) вво- дится равномерная сетка с расчетом частных производных в узлах. На рис. 3 поверхность Pf (u, v) представлена в полупрозрачном виде, а исходная поверхность «Кролика» представлена с обозначением горизонталей.
Построение проекций в локальных базисах
Если «Кролик», двигаясь по поверхности P (u, v), образует динамический базис |^61 62 63 J, то плоскость S, образованная векторами E1 и E2 , является касательной плоскостью к поверхности Pr (u, v) в точке 6r. Проекция точки Rf на плоскость Σ будет такой:
? ? 63 ( Т? г — Т? f )
R f = R f +-- —?—- (рис. 4). «Лиса», двигаясь 6 3 • 6 3
по поверхности Pf (u, v), образует динамический базис |^Q)1 Q)2 Q)3 J . Проекция точки 6r на плос кость Π, образованную векторами Q1 и Q2 , будет
? ? 6 3 ( R f - Rr )
такой: R'= Rr +--Л?—?—- (рис. 5).
r r Q 3 • Q 3
Тогда в базисе ^ 6 ? 1 6 ? 2 6 ? 3 J локальной системы координат «Кролика», координаты проекции
.
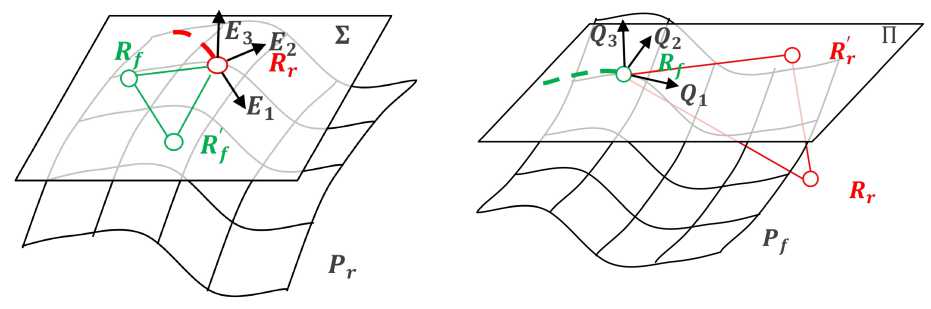
Рис. 5. Проекция «Кролика»
Рис. 4. Проекция «Лисы»
В локальной системе координат [ Q i Q 2 Q 3 ] «Лисы» координаты проекции «Кролика» Rr' бу-
|
[( R; |
- R, ) Q |
|
|
. дут такими: R п = |
( R r |
- R . ) Q |
|
( 7 ■ |
- 7 , ) Q 3 ] |
. Необходимо отметить, что
( R , - R, ) E 3 = 0 , ( Rr- мировой системы
- R f ) Q 3 = o .
На плоскости Σ в системе координат «Кролика» «Кролик» имеет нулевые координаты. Анализ координат «Лисы» «Кроликом» состоит в том, что если «Лиса» находится в нижней полуплоскости 2 , то «Кролик» совершает шаг против часовой стрелки (рис. 6). Если «Лиса» находится в верхней полуплоскости, то «Кролик» совершает шаг по часовой. То есть новые координаты «Кролика» за промежуток времени Δ T равны в системе координат плоскости 2 :
Базис
[ H i H 2 H з J в системе координат будет выглядеть так:
координат
«Кролика»
-----►
-----►
H 2 =
-----► где His =
|
H 1 2 H 2 2 _ H 32 _ > — |
, > > |
-----► ----► |
|
H 1 ■ E i |
H 2 ■ E 1 |
H 3 ■ E 1 |
|
-----► ----► |
-----► -----► ----► |
-- -- - |
|
H 1 ■ E 2 |
. H 2 S = H 2 ■ E 2 |
. H 1 2 = H 3 ■ E 2 |
|
-----► ----► |
-----► ----► |
> > |
|
H 1 ■ E 3 |
H2 ■ E 3 |
H 3 ■ E 3 |
.
cos ( to r ■A T ) - sin ( to r ■A T ) 0
.if (7? f - 7? r ) ■ E 2 < 0;
,if ( R f - R r ) ■ E 2 > 0.
Аналогичное можно сказать про выбор направления движения «Лисой». Если «Кролик» находится в верхней полуплоскости П, то «Лиса» совершает шаг против часовой (рис. 7). Если в нижней полуплоскости, то по часовой стрелке:
cos ( to f - A T )
А в системе координат «Лисы» будет так:
>
|
H 1n |
||||||
|
H n = -- |
[ |
- H 2n [ H 3П ] —- —- H 1 ■ E 1 ----► ----- |
, -- |
[ H 2 ■ E 1 " -----► ----- |
-- |
—” —- H vE 1 |
|
где H 1n = |
H 1 ■ E 2 |
. H 2П = |
H 2 ■ E 2 |
, H 3n = |
H 3 ■ E 2 |
|
|
-[■ |
----► ----- H 1 ■ E 3 |
—” —- [ H 2 ■ E 3 ] |
_ H 3 ■ E 3 ] |
|||
.
Of
Rfn
Vf ■A T ■
- sin ( to f ■
■ T ) .if ( r;
cos ( to f ■A T )
- R f ) ■ Q 2 < 0;
V f ■A T ■ sin ( to f -A T ) ,if ( R r - R f ) ■ Q 2 > 0.
Выбор направления движения
Нами написана программа, которая в расчетном цикле на каждом шаге делает выбор, в каком направлении двигаться «Кролику» и «Лисе». Пусть to r u to f - угловые скорости «Кролика» и «Лисы». Для примера рассмотрим выбор направления движения «Кроликом».
Расчет координат на следующих этапах итераций
Ранее мы рассматривали, как будет выглядеть базис [Hi H2 Hз ] мировой системы коорди-
нат в
[ E E 2
локальных динамических базисах
E 3 J и [ Q 1 Q2 Q 3 ] . Тогда в мировой
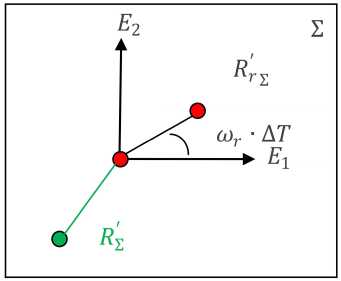
Рис. 6. Выбор направления движения «Кроликом»
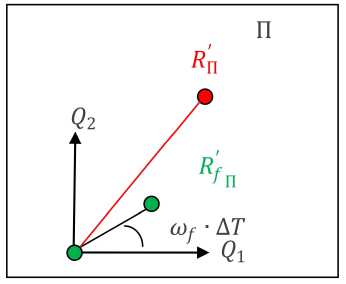
Рис. 7. Выбор направления движения «Лисой»
системе координат |_ H 1 H 2 H 3 J , новые координаты «Кролика» R r £ на плоскости 2 будут та-
——
R rn
кими:
--— ——
R r £ = Rr +
— ‘
R r £
—
R r £
—'
R r £
——
* H 1 £
—
* H 2 £
—
* H 3 £
xrΣ yrΣ
S r ( x r 2 , y r 2 )
——
R fn =
x f П yf П
[ S f ( Х П , Уп ) J
А новые координаты «Лисы» R f П на плоско-
сти П на том же этапе итераций будут выглядеть в мировой системе координат так:
—' —
R fn * H 1П
Таким образом, мы считаем итерационный процесс в поставленной нами задаче преследования сформированным. Критерием достижения цели в разработанной нами программе служит расстояние между «Кроликом» и «Лисой» в горизонтальной плоскости проекций: ( x r2 — -x Jr2^ ( y>2 — y fVr^ " = R o , где R o - неко "
--► ——
R f П = R f +
—► ' —►
R fn * H 2П
торое заданное нами пороговое значение.
—— ' ——
R fn * H 3П
Нам нужны вертикальные проекции точек
R r £ , R f n на поверхности Pr ( u , v ) и P f ( u , v ) со
ответственно. Поверхности Pr ( u , v ) и P f ( u , v ) , по которым движутся «Кролик» и «Лиса», всегда
x
можно преобразовать к виду: Pr ( x , y ) =
и P f ( x , y ) =
y
S f ( x , y )
y
S r ( x , У )
. Если координаты точек с
плоскостей Σ и Π представлены в виде
——
R r £ =
x r Σ y r Σ
z r Σ
R /П =
xf Π y f Π
zf Π
соответственно. Тогда
искомые вертикальные проекции точек, как координаты точек на последующих шагах итераций R rn , R fn , на поверхностях можно представить в виде:
Результаты
На основе работ [1–4] нами предложена математическая модель задачи преследования, когда участники задачи находятся на разных поверхностях. Приближенно можно считать аналогом преследования с воздуха по траектории, учитывающей рельеф местности. Разработан алгоритм построения траекторий в зависимости от пространственного расположения оппонентов. Предложен метод анализа координат оппонента и принятия решений о выборе направления движения.
В системе компьютерной математики «Math-CAD» разработана программа, реализующая данную модель задачи преследования. С полным текстом программы с подробными комментариями можно ознакомиться на сайте автора [5]. Также там расположен архивный файл. По результатам работы программы изготовлено анимированное изображение, которое вы можете просмотреть на канале автора [6]. На рис. 8 представлен первый кадр процесса преследования. В левой части рисунка поверхность «Лисы» не отображена, видимыми являются только траектории «Лисы», «Кролика» и поверхность «Кролика». В правой части рисунка поверхность «Лисы» отображена в полупрозрачном виде.
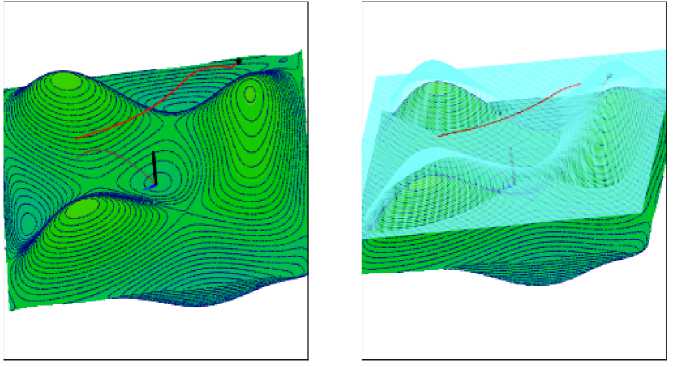
Рис. 8. Преследование по «квазиэквидистанте»
Выводы
В данной статье рассматривалась задача преследования, в которой участники находятся на разных поверхностях. Теоретические аспекты задачи о «водителе-убийце» («катер-торпеда») были рассмотрены в работах Руфуса Айзекса [1]. В работах Л.С. Понтрягина рассматривались теоретические вопросы задачи преследования в пространстве (самолеты) [2]. В работе [3] рассматривалась линеаризованная задача преследования на плоскости с постоянными скоростями и ограниченной кривизной траекторий. В работе [4] рассматривались алгоритмические вопросы управления мобильными роботами в задаче преследования на плоскости. Авторами предложена методика моделирования поведения объектов, участников задачи преследования, в котором присутствуют элементы искусственного интеллекта. Постановка задачи в данной статье предполагает дальнейшее развитие в плане прогнозирования траекторий, получения информации о предполагаемых действиях оппонента в задаче преследования и в плане учета физических характеристик среды, в которой идет преследование.
Мы считаем, что результаты исследования, изложенного в данной статье, могут быть востре бованы разработчиками робототехнических комплексов с элементами искусственного интеллекта.
Список литературы Задача преследования объекта с поверхности, расположенной над поверхностью преследуемого
- Айзекс, Р. Дифференциальные игры / Р. Айзекс. - М.: Мир, 1967.
- Понтрягин, Л.С. Линейная дифференциальная игра убегания / Л.С. Понтрягин. - Тр. МИАН СССР. - 1971. - Т. 112. - С. 30-63.
- Желнин, Ю.Н. Линеаризованная задача преследования и уклонения на плоскости / Ю.Н. Желнин // Ученые записки ЦАГИ. - 1977. - № 3, т. 8. - С. 88-98.
- Бурдаков, С.В. Алгоритмы управлением движения мобильным роботом в задаче преследования / С.В. Бурдаков, П.А. Сизов // Научно-технические ведомости Санкт-Петербургского государственного политехнического университета. Информатика. Телекоммуникации. Управление. - 2014. - № 6 (210). - С. 49-58.
- Движение «Лисы» по «квазиэквидистанте. - http://dubanov.exponenta.ru.
- Видео «Движение «Лисы» по «квазиэквидистанте». - https://www.youtube.com/watch?v= w2HSwKpB63w.
