Задачи нелинейного изгиба стержневых конструкций

Автор: Захаров Ю.В., Охоткин К.Г., Исакова В.В., Скоробогатов А.Д.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 (6), 2005 года.
Бесплатный доступ
Приведены точные решения задачи нелинейного изгиба тонкого стержня под действием сосредоточенной следящей нагрузки. Исследованы симметричные формы прогиба двухзвеньевой стержневой конструкции под действием поперечной сосредоточенной нагрузки. Получены точные аналитические выражения в виде эллиптических функций и интегралов Якоби для формы профиля двухзвенъевой стержневой конструкции.
Короткий адрес: https://sciup.org/148175098
IDR: 148175098 | УДК: 539.3
Problems of the nonlinear bending of rod designs
Exact solutions of the problem of nonlinear bending of a thin bar under a point follower load are given. Symmetric forms of a deflection of a compound rod design under action of the cross concentrated loading are investigated. The solutions are written in unified parametric form and expressed in terms of Jacobi elliptic functions.
Текст научной статьи Задачи нелинейного изгиба стержневых конструкций
В настоящее время актуальными являются исследования, связанные с изучением сложных быстропротека-ющих процессов и структур с нелинейными свойствами. Такие задачи крайне важны как в теоретическом, так и практическом отношении, однако точные их решения получить весьма сложно. Подобные задачи очень часто решаются приближенными или численными методами, и только немногие из них удалось решить аналитически. Задачи разработки устройств микромеханики требуют поиска точных формул для форм изгиба, стрел прогибов и частот собственных колебаний стержневых конструкций при различных видах закрепления и способах приложения нагрузки.
Исследование устойчивости гибких стержней под воздействием следящей нагрузки и составных стержневых конструкций проводилось в работах [1...3]. Однако анализ устойчивости производился, исходя из геометрически линейных уравнений равновесия и движения стержня. При этом, как правило, применялся динамический критерий устойчивости.
Недавно в работах [4; 5] была развита геометрически нелинейная теория изгиба тонких стержней. В этих работах применялся статический критерий устойчивости стержней, основанный на уравнении равновесия типа нелинейного маятника. Были найдены точные аналитические решения и систематизированы формы изгиба стержня при различных нагрузках постоянного направления и способах закрепления концов стержня. Решения были выражены через эллиптические интегралы и функции Якоби, зависящие от одного внешнего параметра - модуля эллиптических функций, определяемого граничными условиями и внешней действующей силой, в отличие от работ [6; 7], где решения зависели от трех параметров. Решения, подобные результатам работ [4; 5], приведены также в статье [8], где рассмотрена возможность вторичной потери устойчивости стержнем.
Данная работа посвящена точному аналитическому решению двух задач о нелинейном изгибе: тонкого упругого стержня при нагружении следящей силой и двухзвеньевой стержневой конструкции под действием поперечной силы.
Общее решение нелинейной задачи об изгибе стержня. Рассмотрим тонкий нерастяжимый стержень длиной L с изгибной жесткостью EI. Выберем декартову систему координатХОУтак, чтобы изначально прямой стержень был расположен вдоль оси ОХ, закреплен на левом конце, находящемся в начале координат, и свободен либо закреплен на правом конце. Стержень сжимается силой Р, сосредоточенной на правом конце стержня и направле ние действия которой образует некоторый угол с осью ОХ. Обозначим через l длину вдоль линии стержня, через 6(l) - угол между касательной в текущей точке к линии стержня и осью ОХ, через Рх, Ру - декартовы компоненты силы Р (рис. 1).
Рис. 1. Система координат
Приведем краткое общее решение этой задачи, следуя работе [5]. Обозначим через ф угол между направлением действия силы и осью ОХ .
Нелинейное уравнение равновесия стержня имеет вид 2
EI - P r sin 9 + Pv cos 9 = 0 . (1)
dl 2 x y
Введем следующие обозначения: Р - модуль сосредоточенной силы; t = l/ L- безразмерная длина, изменяющаяся от 0 до 1; q 2 = PL 2 / EI - собственное число. Приведем решение уравнения (1):
9(t) = -ф + 2arcsin [k sn (qt + F 1, k)], dи(t) / dt = 2kq cn (qt + Fp k), (2)
где sn, cn - эллиптические синус и косинус Якоби. Модуль эллиптических функций к и параметр F t выполняют роль констант интегрирования, и их связь с силой Р и углом ф определяется по граничным условиям в каждом случае изгиба стержня.
Введем обозначение для аргумента эллиптических функций
M ^ qt + F t . (3)
Интегрируя соотношения dx/ dl = cos 9, dy / dl= sin 9, найдем координаты произвольной точки стержня:
x/L = X 0 cos ф+ Y 0 sin ф ,
y]L = Y 0 cos ф- X 0 sin ф , (4)
где
X 0 =- 1 + — [ E ( am u , k ) -E ( am F 1 , k ) ] ;
q
Y 0 = 2k- [ cn ( F 1 , k ) - cn ( u , k ) ] ■ (5)
q
Здесь Е (ат и ) - неполный эллиптический интеграл второго рода от эллиптической амплитуды Якоби. Выражения (4), (5) задают форму профиля изогнутого стержня в параметрическом виде с параметром t - приведенной длиной стержня.
Представим, следуя методу работы [5], точное аналитическое решение для двух упругих систем.
Изгиб стержня с защемленным и свободным концами под действием следящей силы при произвольном угле слежения. Рассмотрим стержень, жестко защемленный на одном конце и свободный на другом, находящийся под действием следящей силы, с заданным углом слежения. Граничные условия рассматриваемого закрепления концов стержня имеют вид
9 (0) = 0, d 9( L ) / dl = 0. (6)
Введем угол слежения а - угол между линией действия силы и касательной к линии изгиба стержня в конце стержня (см. рис. 1). При нагружении следящей силой угол ф между направлением действия силы и осью ОХ может изменяться в процессе нагружения.
Исходя из определения следящей силы, запишем дополнительное условие постоянства угла а на конце стержня:
9(1) = а-ф . (7)
Будем считать величины Р и а параметрами состояния, заданными условиями задачи.
С учетом первого условия в (6) и используя решение (2) уравнения (1), получим sn F , = sin (ф / 2) / к , отсюда
F1 = F [arcsin(sin(ф /2 ) к к), к ],(8)
где Г (ф, к ) - неполный эллиптический интеграл первого рода.
По второму условию в (6) имеем cn (q + F,) = 0 и q = (2 n-1)К(к)-F ,,n = 1,2,3,...,(9)
где К ( к ) - полный эллиптический интеграл первого рода.
Используя условие для следящей силы (7), по (2) и (9) получим, что sin (б / 2)= к sn (К(к), к), следовательно к=sin(а/2).(10)
Выражение (10) определяет значение модуля эллиптических функций и интегралов к по известному значению угла а. В задаче со следящей силой нагрузка при заданном угле а определяет угол ф, в отличие от задачи изгиба стержня при нагружении силой постоянного направления [5], в которой нагрузка при заданном угле ф определяет модуль к . По выражениям (8).(10) следует спектр собственных значений q ( к ), который в свою очередь определяет критические нагрузки
P / P c = (2 / л) 2{(2 n - 1) K (sin (а / 2)) -
- F [arcsin(sin (ф / 2) / sin (а / 2)), sin (а / 2)]} 2, (11) где n - номер моды решения. Выражение (11) показывает связь между величиной внешней следящей силы Р и ф -углом наклона силы к оси ОХ для каждой моды n при заданном угле слежения а (рис. 2).
При изменении величины внешней силы для каждой моды, исходя из (10), параметр ф изменяется в пределах
-а < ф < а. (12)
При ф =±а имеем пороговые значения внешней силы:
-
— = ( n -1)2| — I K 21 sin— I, n = 1,2, ., (13)
Pc Iл JI 2 )
при превышении которых происходит смена моды решения. Первая мода ( n = 1) начинается с нулевого порога (Р , =0).
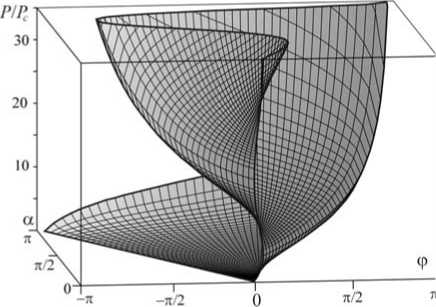
Рис. 2. Спектр собственных значений нелинейного уравнения равновесия при действии следящей силы
На первой моде внешняя сила Р / Р с плавно и непрерывно увеличивается от нуля до следующего, второго порогового значения Р 2 , а параметр ф - угол наклона силы к оси ОХ- при этом плавно изменяется от а до -а. Вторая мода решения появляется при превышении нагрузкой Р порогового значения Р 2 , при этом угол ф = -а. На второй моде ( n = 2) внешняя сила Р / Р увеличивается дальше от Р 2 до Р 3 , а параметр ф при этом изменяется в обратном направлении от -а до а и т. д.
Таким образом, основной особенностью решения задачи изгиба стержня при следящем нагружении является плавный переход между модами (смена мод) решения при увеличении внешней нагрузки. Можно говорить о мягкой потере устойчивости при изгибе. Это является существенным отличием от задачи с нагружением стержня силой постоянного направления [5], где нет плавного перехода между модами и реализуется только одна из возможных мод решения. Реализация старших мод возможна при условии импульсного, скачкообразного нагружения. Поэтому здесь можно говорить о жесткой потере устойчивости.
Координаты точек стержня определяются выражениями (4), (5) при подстановке значений q , Fр к из (8).(10). Тогда в общем случае заданных произвольного угла слежения а и величины силы Р получим выражения для формы прогиба стержня:
x
L
t + 2
( E ( am u ) - E 1 )
PK ( к ) - F
( cn F - cn u) .
cos ф + 2 к----1^-----sin ф, pK (к)-F1
y = 2 к
L
(cn F - cn u) ----74----cos ф - pK (к)-F1 v
( E ( am u )- E 1 ) t + 2 pK ( к ) - F .
-
sin ф ,
где F 1 = F [ arcsin ( sin ( p / 2)/ к ), к ] ; E 1 = E [ arcsin ( sin ( p 2 )/ к ), к ] ; и = (рК ( к ) - F , ) t + F , ; р = 2 n -1; к = sin(а / 2).
Величина силы Р будет связана с параметром ф выра жением (11).
Таким образом, каждому значению внешней силы Р и номеру моды n при заданном угле слежения а соответствует своя форма прогиба стержня, задаваемая одним параметром - углом ф, который в соотношении (11) определяется по известной силе Р (рис. 3).
При нагружении следящей силой переход от одной моды к другой происходит плавно, в отличие от нагруже- ния силой постоянного направления. В развернутом виде решение данной задачи приведено в статье [11].
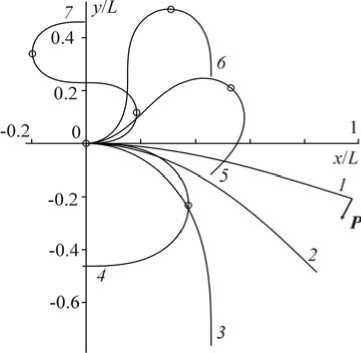
Рис. 3. Формы прогиба стержня при различных значениях поперечной следящей силы: первая мода ( п = 1): кривые 1- q = 2 ^ /5;2- q = ^ /4;3- q = 0;4- q = - ^ /2. Вторая мода ( п = 2): кривые 5- р =- л /4;6- р = 0;
7- q = л / 2; кружками отмечены точки сжатия
Изгиб двухзвеньевой стержневой конструкции при поперечной нагрузке. Рассмотрим двухзвеньевую стержневую конструкцию, состоящую из двух шарнирно соединенных тонких гибких стержней, под действием поперечной сосредоточенной нагрузки (рис. 4). Введем обозначения: а - начальный угол наклона стержня к оси OY , Р - поперечная сосредоточенная нагрузка.
* у
Рис. 4. Схема двухзвеньевой стержневой конструкции
Стержни в конструкции имеют одинаковые геометрические и физические параметры. Рассмотрим симметричные формы прогиба двухзвеньевой стержневой конструкции. В данной задаче пренебрегаем деформациями растяжения, сжатия и будем рассматривать только деформации чистого изгиба.
Запишем нелинейные уравнения равновесия для каждого стержня в конструкции d-^- + q 2 sin у = 0, (15)
dt 2
где y( t ) = 9( t ) + 9. В случае поперечной нагрузки угол 9=л/2.
Точное решение уравнения (15) записано в эллиптических функциях и интегралах Якоби
y(t ) = 2arcsin[k sn(qt + F2,k)] , y'(t )= 2 kq cn(qt + F2, k). (16)
Рассмотрим три случая закрепления двухзвеньевой стержневой конструкции в основании: шарнирное, жесткое и упругое.
Запишем граничные условия к уравнению (15) для шарнирного закрепления в основании конструкции. В этом случае изгибающий момент обращается в ноль:
dу(0) / dt = 0.(17)
Условие соединения частей двухзвеньевой стержневой конструкции x (l) = sina.(18)
Применяя первое условие (17) к решению (16), получим, что cn ( F 2 , к ) = 0, следовательно
F2 (2п-1)К(к),п 1.2.2, _,(19)
где К ( к ) - полный эллиптический интеграл первого рода; п - номер моды решения.
Применяя второе условие (18) к выражениям (4), (5), получим трансцендентное уравнение для определения зависимости собственного числа q от модуля эллиптических функций к и угла а:
-
2 k cn ( q + (2 n - 1) K ( k ), k ) + q sin a = 0 . (20)
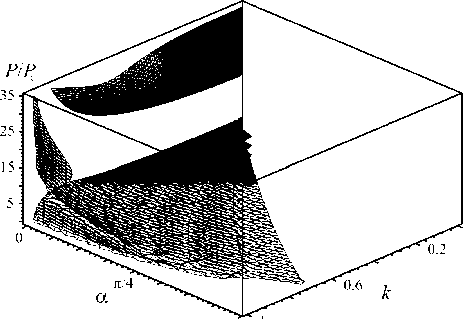
Трансцендентное уравнение (20) не имеет точных аналитических решений, поэтому для нахождения спектра собственных значений q ( к ), который в свою очередь определяет систему порогов внешней нагрузки, будем использовать численные методы. Область изменения модуля к при q = 0 sin(a / 2) < к < cos(a / 2). В соответствии с выражением (20) построим зависимость приведенной нагрузки Р / Р с от модуля к и начального угла наклона а, где Р = (л / 2) 2 EI / L 2 - Эйлерова критическая сила (рис. 5).
л/2
Рис. 5. Спектр собственных значений нелинейного уравнения равновесия для двухзвеньевой стержневой конструкции при шарнирном закреплении
Там показаны две отдельные области, в которых одному значению модуля к соответствуют разные значения нагрузки Р / Р . Нижняя поверхность соответствует первому собственному числу - первой статической моде нагружения, верхняя поверхность - второму собственному числу - динамической моде нагружения.
Статический порог нагрузки для однородного стержня при п =1 равен Эйлеровой силе. Пороги при п >1 были названы М. А. Лаврентьевым и А. Ю. Ишлинским динамическими порогами потери устойчивости, которые могут быть достигнуты при ударном приложении нагрузки, когда время нарастания импульса меньше времени релаксации системы [10]. В данной работе представлены только результаты исследования для статической моды нагружения.
Форма изогнутой линии стержня в параметрическом виде определяется выражениями (4), (5) и (19), (20):
x
L
^^^^^^»
2k cn (u, k) , q
— = - t + — [ E ( am u , k ) - E ( k ) ] , Lq
где аргумент функций u = qt + ( 2 n - 1 ) K ( k ) .
Рассмотрим второй случай закрепления двухзвеньевой стержневой конструкции -закрепление на жестком основании под действием поперечной сосредоточенной нагрузки.
Жесткое закрепление стержня в основании конструкции требует выполнения условия
у(0) = 0(0) + л/ 2 = л/ 2- а + л/ 2= л-а . (22)
Второе граничное условие - условие соединения частей двухзвеньевой стержневой конструкции (18).
Применяя первое граничное условие (22) к решению (16), получим
I I 1 a ' I
F = nF I arcsin l —cos— , k , 2 I I k 2 J
Третий случай закрепление двухзвеньевой стержневой конструкции - закрепление на упругом основании под действием поперечной сосредоточенной нагрузки.
cos2 ( a/2 )
и = 1,2,3, ^, cn( F 2 , к ) = Л-- k .—". (23)
Модуль к изменяется в пределах, определяемых начальным углом наклона a: cos(a / 2)< к < 1.
Применяя второе граничное условие (18) к выражениям (4), (5), получим трансцендентное уравнение для нахождения спектра собственных значений q n ( к ), определяющего систему порогов внешней нагрузки:
cn ( F 2, k ) - cn ( q + F 2, k ) - q s™ a = 0 . (24)
2 2 2 k
Форма изогнутой линии стержня в параметрическом виде определяется выражениями (4), (5) и (23), (24):
x = 2 k [ cn ( F 2, k ) - cn( u , k ) ] ,
Lq
— = - t + — [ E ( am u , k ) - E2 ] , Lq 2
( 1 a ^ l arcsinl -cos— I k .
I k 2 J
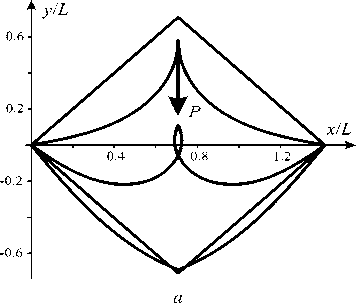
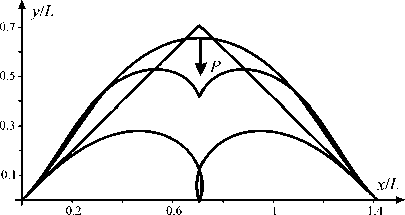
На основании точных аналитических решений (21) и (25) построим последовательные формы прогиба изогнутой двухзвеньевой стержневой конструкции под действием поперечной нагрузки при шарнирном и жестком закреплении в основании для угла а = л / 4 (рис. 6).
Таким образом, каждому значению внешней силы Р будет соответствовать своя форма прогиба двухзвеньевой стержневой конструкции, задаваемая одним параметром - модулем эллиптических функций к , который определяется внешней действующей нагрузкой Р .
Представим зависимости прогиба двухзвеньевой стержневой конструкции в точке приложения силы от приведенной нагрузки Р / Р для угла наклона а = л / 4 для двух случаев закрепления конструкции в основании: шарнирного и жесткого (рис. 7).
б
Рис. 6. Последовательные формы прогиба двухзвеньевой стержневой конструкции: а - при шарнирном закреплении; б - на жестком основании. Соответствующие нагрузки:
Р , =2,61 Р С , Р 2 = 4,75 Р с , Р 3 = 2,77 Р с
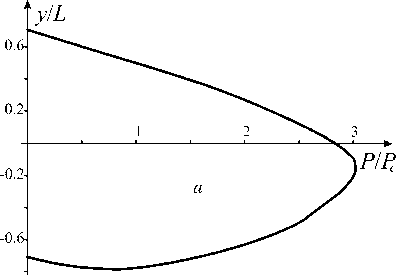
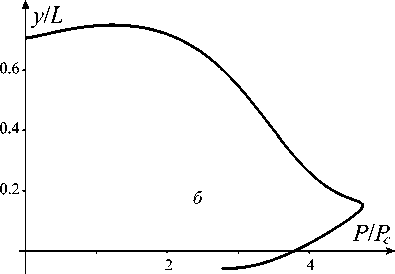
Рис. 7. График зависимости прогиба конструкции: а - при шарнирном закреплении;
б - на жестком основании от приведенной нагрузки Р / Р =
Упругое закрепление стержня в основании конструкции требует, чтобы
у ( 0 ) - h /( 0 ) = п - а , (26)
где h "* - жесткость закрепления. Второе граничное условие - условие соединения частей двухзвеньевой стержневой конструкции (18).
После применения граничных условий получаем систему двух трансцендентных уравнений для определения собственного числа q и параметра F 2 :
arcsin [ k sn ( F 2 , k ) ] - hkq cn ( F 2 , k ) = ( л - a )/ 2,
-
cn ( F 2 , k ) - cn ( q + F 2 , k ) = q sin a/ 2 k . (27)
Решая систему (27) с помощью численных методов, можно найти зависимость собственного числа q от модуля к .
Форма изогнутой линии стержня в параметрическом виде определяется выражениями (4), (5) и (27):
x = 2k [ cn ( F 2 , k ) - cn( u , k ) ] ,
Lq
-
— = - t + — [ E ( am u , k ) - E ( am F 2, k ) ] , (28)
Lq где u = qt + F2 - аргумент функций. Последовательные формы прогиба изогнутой двухзвеньевой стержневой конструкции на упругом основании под действием поперечной нагрузки для угла а = л / 4, исходя из точных аналитических решений (28), имеют следующий вид (рис. 8).
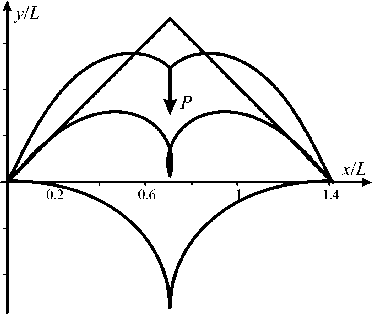
Рис. 8. Последовательные формы прогиба двухзвеньевой стержневой конструкции на упругом основании ( h = 1). Соответствующие нагрузки
Р , = 2,90 Р с , Р 2 = 2,82 Р с , Р 3 = 0,74 Р с
В соответствии с выражениями (20), (24) и (27) построим зависимости приведенной нагрузки Р / Р с от модуля эллиптических функций к для начального угла наклона а, равного л / 4 для трех случаев закрепления двухзвеньевой стержневой конструкции (рис. 9).
Граничное условие упругого закрепления (26) имеет два предельных случая: при h ^ 0 условие (26) переходит в условие (22) для жесткого закрепления, а при h ^^ условие (26) переходит в условие (17) для шарнирного закрепления.
Таким образом, при последовательном применении методики, представленной в работе [5], получены точные решения задачи о геометрически нелинейном изгибе тонкого стержня под действием следящей силы. Эти решения имеют удобный для алгоритмических вычислений вид и позволяют подробно анализировать формы решений и пороги потери устойчивости для различных мод изгиба стержня. Этот анализ позволил показать существенную разницу между жесткой потерей устойчивости при нагружении силой постоянного направления и мягкой потерей устойчивости при нагружении следящей силой. Полученные результаты можно использовать в качестве тестовых примеров при разработке численных методов решения нелинейных уравнений изгиба стержней [9].
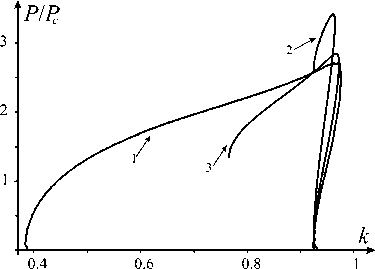
Рис. 9. Графики зависимости приведенной нагрузки
Р / Р = от модуля к : кривая 1 - конструкция при шарнирном закреплении ( h ^ ^ ); кривая 2 - конструкция на жестком основании ( h = 0); кривая 3 - конструкция на упругом основании ( h =1)
В работе исследованы симметричные формы прогиба двухзвеньевой стержневой конструкции при шарнирном, жестком и упругом закреплении в основании в случае геометрической нелинейности системы. Найдены формы прогиба двухзвеньевой стержневой конструкции и области значений внешней действующей нагрузки. При решении поставленной задачи была использована система геометрически нелинейных уравнений равновесия тонких гибких стержней типа уравнения нелинейного маятника. Точные аналитические решения для формы прогиба изогнутой двухзвеньевой стержневой конструкции записаны с помощью аналитических выражений в едином параметрическом виде, с использованием эллиптических функции и интегралов Якоби. Эти выражения зависят от одного параметра - модуля эллиптических функций, определяемого внешней действующей нагрузкой. Такое представление решения позволяет находить формы изогнутой стержневой конструкции при любом числе точек перегиба. Полученные результаты можно применять для анализа ферм и рам, применяемых в строительных и авиационных конструкциях и системах, при различных условиях опирания.
Работа поддержана грантом РФФИ 02-01-01017.
