3D моделирование для визуального мониторинга водоема в акватории пересыхающего моря или реки

Автор: Р.Р. Абдуллин, Д.А. Егоров, В.В. Каретников, Н.В. Крупенина, В.Ю. Рудь, И.А. Чернов
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6 т.27, 2025 года.
Бесплатный доступ
В статье рассматриваются вопросы оперативной фильтрации и визуализации результатов натурных исследований глубин и рельефа с помощью водных дронов во вновь образованных водоемах в акватории пересыхающего моря или реки. Представленный способ фильтрации натурных данных и построения модели водоема позволяет повысить оперативность и точность расчетов для дноуглубительных работ на 1520%.
3D моделирование, визуальный мониторинг, фильтрация данных, обмеление акватории, робот-дрон
Короткий адрес: https://sciup.org/148332863
IDR: 148332863 | УДК: 004.942 | DOI: 10.37313/1990-5378-2025-27-6-199-206
3D Modeling for Visual Monitoring of a Reservoir in the Waters of a Drying Sea or River
The article discusses the issues of operational filtration and visualization of the results of field studies of depths and relief using water drones in newly formed reservoirs in the water area of a drying sea or river. The presented method of filtering field data and constructing a reservoir model makes it possible to increase the efficiency and accuracy of calculations for dredging operations by 15-20%.
Текст научной статьи 3D моделирование для визуального мониторинга водоема в акватории пересыхающего моря или реки
Естественные колебания уровня воды во внутренних водоемах создают многочисленные проблемы для береговой инфраструктуры, затрудняют судоходство и рыболовную деятельность, а также негативно влияют на экологический баланс как в прибрежной зоне, так и в окружающих водах. Решение этих проблем требует осторожного и деликатного подхода, чтобы не нарушить хрупкие экосистемы местной флоры и фауны. Для смягчения негативных последствий обмеления проводятся регулярные дноуглубительные работы, которые необходимо тщательно планировать из-за постоянно меняющихся границ водоемов. В этом контексте все более актуальной становится необходимость постоянного мониторинга вновь образованных изолированных водоемов с использованием автономных водных дронов [1]. Подобных готовых дронов на данный момент нет, поэтому данный проект весьма актуален.
ЦЕЛЬ ИССЛЕДОВАНИЯ
Основной целью исследования служит разработка методики оперативного автоматизированного построения визуальной 3D модели вновь образовавшегося водоема на отступившей акватории для проектирования дноуглубительных работ. При реализации основной цели исследования появляется множество вспомогательных проблем, при этом важнейшей становится задача разработка методики оперативной автоматизированной фильтрации данных датчиков при обследовании вновь образовавшихся водоемов с занесением результатов показаний датчиков в базу данных и оперативной визуализацией полученных данных.
ПОСТАВЛЕННЫЕ ЗАДАЧИ
Основной задачей исследования является планирование траектории движения водного дрона по акватории водоема для построения наиболее адекватной модели его глубин, с занесением результатов показаний датчиков в базу данных и оперативной визуализацией полученных данных.
Данные датчиков являются приближенными, поскольку при их чтении и передаче они подвергаются воздействию внешних факторов, накладывающих шум на считываемый сигнал, поэтому вспомогательной целью исследования служит разработка методики оперативной автоматизированной фильтрации данных датчиков, поступающих при обследовании вновь образовавшегося водоема на отступившей акватории для проектирования дноуглубительных работ, учитывая это, перечень поставленных задач сводится к следующим действиям:
-
1. Разработка алгоритма оперативной фильтрации данных датчиков водного дрона.
-
2. Создание системы оперативной визуализации полученных данных.
-
3. Внедрение методов повышения точности измерений.
-
4. Тестирование разработанных алгоритмов на практике.
МЕТОД ИССЛЕДОВАНИЯ
Методом исследования основан на получении данных от датчиков при движении водного дрона по акватории водоема и их оперативной фильтрации для уменьшения вероятности внесения в модель ошибочных данных.
Робот, построенный по технологии Ардуино [2] обладает небольшими габаритными размерами
(примерно 25 на 25 см), оснащен следующими датчиками (точность измерений ±5%):
. для измерения глубины - водонепроницаемый ультразвуковой датчик JSN-SR04T;
. для распознавания границ водоема - использовать ультразвуковой датчик HC-SR04;
. для передачи данных - Bluetooth датчик HC-06;
. для отслеживания местоположения в водоеме - датчик GPS.
ПОДГОТОВИТЕЛЬНЫЙ АЛГОРИТМ ВИЗУАЛИЗАЦИИ
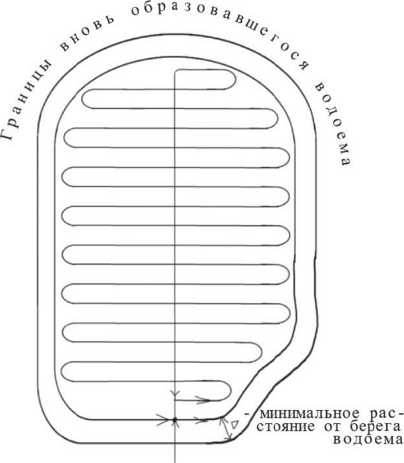
Точка начала движения робота
Данные (пирота, долгота, глубина, расстояние до берега)
Рис. 1. Траектория движения дрона по водоему
Первоначально робот помещается на край водоема и отходит от него на небольшое расстояние (15-20 см для возможности поворота, не задевая берега). Робот должен обойти водоем по краям на небольшом расстоянии от края, собирая координаты маршрута и измеренные глубины и строя при этом 3D модель краев резервуара. После этого методом равномерных сеток необходимо исследовать всю поверхность водоема, конкретизируя глубины резервуара в 3D модели (Рис. 1), при этом данные аналогичной структуры небольшими пакетами подгружаются в модель ПО Blender. Затем движением робота можно управлять с пульта, отображая маршрут его передвижения в 3D модели.
После прохода полного круга будет получена таблица сведений о водоеме следующей структуры (таблица I)/
Сразу после получения таблицы данных прохода первого круга строится приближенная модель водоема, а затем, в режиме реального времени модель конкретизируется, с помощью добавления в нее данных от вновь получаемых точек сканирования.
Для построения первоначального приближения модели данные двух столбцов измерений – широты и долготы переводятся из угловых данных в линейные и определяется их относительное расстояние от точки отсчета - начальной точки измерений в прямоугольной декартовой системе координат, и таблица дополняется координатами берега на основе столбца с расстоянием от точки измерения до берега, где глубина будет нулевой.
Расстояние между точками по их известным географическим координатам определяется по формулам сферической тригонометрии.
Кратчайшее расстояние между двумя точками на земной поверхности (если принять ее за сферу) определяется зависимостью [4]:
Таблица I. Данные датчиков при мониторинге
Затем по трем измерениям водоема – широте, долготе и глубине определяется наибольшее и наименьшее значение, которые будут определять параметры графического образа, построенного на основе параллелепипеда.
Модель строит поверхность дна водоема методом линейной интерполяции и имеет возможность поворота угла обзора.
Данные, первоначально полученные с дат-
# prototype 3d чиков, в режиме реального времени записыва ются в файл с расширением txt (Рис. 2). Когда робот закончит первоначальное сканирование водоема, данный файл будет экспортироваться в obj формат, а затем импортироваться в про граммное обеспечение Blender для построения геометрического образа границ водоема. Рис. 2. Данные, полученные роботом
АЛГОРИТМ УТОЧНЕНИЯ МОДЕЛИ
Для уточнения данных глубин дрон пультом управления может быть отправлен в любую доступ- ную точку водоема.
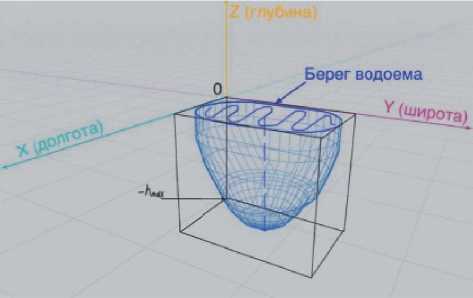
Рис. 3. Трехмерная модель водоема
Алгоритм следования дрона в пределах водоема для уточнения глубин основан на равномерной сетке, а в тех местах, где наблюдается большой перепад глубин, расстояния между последовательными траекториями движения дрона по поверхности водоема уменьшаются, и производится снятие данных в промежуточных точках, которые оперативно отображаются в 3d модели.
В результате исследования получается уточняемая на каждом шаге исследования визуальная модель вновь образованного водоема (Рис. 3).
ПОДГОТОВИТЕЛЬНЫЙ АЛГОРИТМ ФИЛЬТРОВАНИЯ
Данные, считываемые с датчиков, подвергаются первичной обработке процессором Ардуино, с целью недопущения сильно зашумленных данных в базу оперативных данных, а затем на в режиме реального времени собираются и аккумулируются в базе данных пакета Blender 3D для создания трехмерной компьютерной графической модели [3].
Качественная фильтрация шума способна уменьшить погрешность и увеличить качество измерения датчика, при этом необходимо бороться с двумя видами шума: как постоянным шумом (аддитивным белым гауссовским шумом) с относительно стабильной амплитудой, так и со случайными импульсами, вызванными внешними факторами.
Для борьбы со случайным шумом хорошо подходит метод среднего арифметического, который хранит в буфере несколько предыдущих значений измерений, при добавлении в буфер нового значения в конец последовательности «окно» просмотра значений передвигается по ней. Недостатком данного метода является некоторое замедление обработки данных из-за необходимости вы- полнять вычисления с плавающей точкой, но они все равно выполняются быстрее операций обмена данными, поэтому незначительно влияют на скорость снятия показаний датчиков [5].
Для борьбы со случайными импульсами в пределах одного измерения удобно использовать метод медианного фильтра [5], который в комбинации с методом среднего арифметического дает на экспериментальных данных вполне приемлемый результат.
После предварительной фильтрации обработанные данные по каналу WiFi связи передаются в управляющий компьютер, где подвергаются более тщательной обработке.
Первичная обработка данных:
-
. Медианный фильтр для борьбы со случайными импульсами.
-
. Метод среднего арифметического.
-
. Предварительная фильтрация на борту дрона.
Параметры настройки фильтров:
-
. Размер окна медианного фильтра: 5-7 измерений.
-
. Период усреднения: 3-5 секунд.
-
. Пороговое значение отклонения: 3 σ .
АЛГОРИТМ УТОЧНЕНИЯ МОДЕЛИ
Алгоритм следования дрона в пределах водоема для уточнения глубин основан на равномерной сетке, а в тех местах, где наблюдается большой перепад глубин, расстояния между последовательными траекториями движения дрона по поверхности водоема уменьшаются и производится снятие данных в промежуточных точках. Для уточнения данных глубин дрон пультом управления может быть отправлен в любую доступную точку водоема. Модель строит поверхность дна водоема методом линейной интерполяции, но перед тем, как отправить полученные с датчика данные в базу данных для построения модели, эти данные на компьютере фильтруются методом «гусеницы» (SSA) [6], реализованном программным обеспечением GNU Octave [4].
Данные, передаваемые по каналам связи, подвергаются воздействию «джиттера» - нежелательного нарушения временной периодичности сигнала. В каналах связи джиттер представляет собой колебание временного положения информационного сигнала относительно его номинального значения. Джиттер в каналах передачи данных вызывается нестабильностью синхронизации, флюктуацией трактов. Для джиттера характерным является наличие в нем двух компонент: чисто случайной и квазидетерминированной, обычно низкочастотной, компоненты, которая в цифровых системах обозначается термином «вандер» [7].
Особый интерес представляет фильтрование квазидетерминированной составляющей, наличие которой определяется в основном характеристиками используемого оборудования. Для выделения этой составляющей предлагается использовать метод анализа временных рядов «Гусеница», главным преимуществом которого является отсутствие необходимости в априорной модели джиттера. «Гусеница» или метод сингулярно-спектрального анализа, который позволяет проводить более качественный анализ различных временных рядов, по сравнению с распространенными традиционными методами.
Основная цель SSA — разложить ряд в сумму интерпретируемых компонент, таких как тренд, периодические компоненты, шум. Суть метода заключается в преобразовании одномерного ряда в многомерный с помощью однопараметрической сдвиговой процедуры (отсюда и название «Гусеница»), исследовании полученной многомерной траектории с помощью анализа главных компонент (сингулярного разложения) и восстановлении (аппроксимации) ряда по выбранным главным компонентам. Результатом применения метода является разложение временного ряда на простые компоненты – медленные тренды и другие периодические или колебательные составляющие, а также шумовые компоненты.
После прохождения подобной процедуры фильтрации, очищенные от воздействия шума данные – медленные тренды используются для построения 3D модели водоема.
Основные этапы реализации метода “гусеницы” (SSA)
Этап 1. Эмбеддинг-преобразование
Эмбеддинг - это процесс преобразования каких-либо данных в набор чисел, векторы, которые машина может не только хранить, но и с которыми она может работать.
Исходный временной ряд x(t) преобразуется в многомерный ряд путем создания матрицы траекторий. Для этого выбирается окно разложения L (100-200 точек), и каждая последовательность из L точек образует вектор-строку матрицы X.
Этап 2. Сингулярное разложение
Полученная матрица X подвергается сингулярному разложению:
X = UΣV T, где U и V – ортогональные матрицы, а Σ – диагональная матрица сингулярных значений. Сингулярное разложение можно переформулировать в геометрических терминах следующим образом: линейный оператор, отображающий элементы пространства в себя, представим в виде последовательно выполняемых линейных операторов вращения и растяжения. Поэтому компоненты сингулярного разложения наглядно показывают геометрические изменения при отображении линейным оператором множества векторов из векторного пространства в себя или в векторное пространство другой размерности.
Этап 3. Группировка компонент и анализ главных компонент
Выделяются главные компоненты на основе анализа сингулярных значений. Обычно используется 3-5 компонент, превышающих порог отсечки шума 0.05.
Этап 4. Восстановление очищенного сигнала
Очищенный сигнал реконструируется путем обратного преобразования отобранных компонент: Х^=∑ i =1k σ iuivi T, где k – количество выбранных компонент.
Параметры метода SSA:
-
. Длина окна разложения: 100-200 точек.
-
. Количество компонент для восстановления: 3-5.
-
. Порог отсечки шума: 0.05.
Особенности реализации
Алгоритм обладает следующими характеристиками:
-
. Адаптивность к изменениям в данных.
-
. Не требует предварительных настроек для разных типов сигналов.
-
. Высокая скорость обработки благодаря матричным операциям.
-
. Устойчивость к выбросам и аномалиям в данных.
Контроль качества фильтрации
Качество фильтрации оценивается по следующим метрикам:
-
. Коэффициент подавления шума.
-
. Корреляция с исходным сигналом.
-
. Среднеквадратическая ошибка восстановления.
. Временная стабильность результатов.
Данный алгоритм обеспечивает оптимальное соотношение между сохранением полезной информации и удалением шумовых компонент, что критически важно для точности измерений при дноуглубительных работах.
СОВРЕМЕННЫЕ АНАЛОГИ
Алгоритмическая компенсация погрешностей измерений является основным методом повышения точности современных систем мониторинга. Для ее реализации требуется синтез алгоритмов оценивания, который включает в себя формирование модели оцениваемого вектора состояния динамической системы. От вида и порядка модели зависят точность и качество получаемых в результате фильтрации оценок. Для решения задачи алгоритмической компенсации погрешностей применяются различные методы обработки информации, в которых часто используется фильтр Калмана — алгоритм, оценивающий вектор состояния динамической системы по текущим измерениям.
Определение с максимально возможной точностью координат и соответствующих им глубин по последовательности измерений, формируемых радиолокационной или оптикоэлектронной системой, является центральной задачей любой системы мониторинга. Для ее решения разработано значительное число алгоритмов [9,10,11,12], базирующихся, в основном, на известном рекуррентном алгоритме фильтра Калмана, эффективно реализуемом на цифровых вычислителях.
Однако считать окончательно решенной данную проблему до сих пор нельзя. Обусловлено это многими факторами, и одним из наиболее существенных является нелинейный характер моделей движения и измерений во многих практических задачах. Нелинейность появляется по многим причинам – в силу нелинейной связи систем координат, используемых в уравнениях объекта наблюдения и измерителя, из-за нелинейного характера самих уравнений.
Игнорирование нелинейностей и предельное упрощение ситуации может существенно снизить эффективность алгоритмов оценивания координат и скоростей в реальных системах слежения за целями. На практике нелинейные алгоритмы оценивания применяются, но, в основном, ограничиваются простейшими вариантами, такими как расширенный фильтр Калмана. При этом более мощные алгоритмы существуют, но применяются редко, поскольку требуют больших вычислительных затрат. Однако стремительный рост возможностей вычислительной техники на протяжении многих последних лет вполне позволяет использовать многие из этих алгоритмов на практике.
Сравнение с существующими методами:
. Фильтр Калмана – это эффективный рекурсивный фильтр, оценивающий вектор состояния динамической системы, используя ряд неполных и зашумленных измерений. Фильтр Калмана предназначен для рекурсивного дооценивания вектора состояния априорно известной динамической системы, то есть для расчёта текущего состояния системы необходимо знать текущее измерение, а также предыдущее состояние самого фильтра. Таким образом, фильтр Калмана, подобно другим рекурсивным фильтрам, реализован во временно́м, а не в частотном представлении, но, в отличие от других подобных фильтров, фильтр Калмана оперирует не только оценками состояния, а ещё и оценками неопределённости (плотности распределения) вектора состояния, опираясь на формулу Байеса условной вероятности.
Алгоритм работает в два этапа. На первом этапе – этапе прогнозирования фильтр Калмана экстраполирует значения переменных состояния, а также их неопределённости. На втором этапе по данным измерения (полученного с некоторой погрешностью) результат экстраполяции уточняется. Благодаря пошаговой природе алгоритма он может в реальном времени отслеживать состояние объекта (без заглядывания вперёд, используя только текущие замеры и информацию о предыдущем состоянии и его неопределённости) [14].
. Анализ Фурье – направление в анализе, изучающее каким образом общие математические функции могут быть представлены либо приближены через сумму более простых тригонометрических функций. Анализ Фурье возник при изучении свойств рядов Фурье, и назван в честь Жозефа Фурье, который показал, что представление функции в виде суммы тригонометрических функций значительно упрощает изучение процесса теплообмена. Анализ Фурье находит применение при решении широкого спектра математических задач. В науке и технике, процесс разложения функции на колебательные компоненты называют анализом Фурье, а оперирование и восстановление функций из таких частей — синтезом Фурье. Например, при определении, какие именно компоненты частот присутствуют в музыкальной ноте, применяют анализ Фурье к выбранной музыкальной ноте. После чего можно синтезировать тот же звук используя те частотные компоненты, которые были обнаружены при анализе.
. Вейвлет-преобразование – это метод, который разлагает сигнал на линейную комбинацию смещенных и масштабированных версий материнского вейвлета. Поскольку это подход с несколькими разрешениями, он обеспечивает представление сигнала с очень хорошей локализацией по времени и частоте. Это интегральное преобразование, которое представляет собой свертку вейв-лет-функции с сигналом. Вейвлет-преобразование переводит сигнал из временного представления в частотно-временное.
Способ преобразования функции (или сигнала) в форму, которая или делает некоторые величины исходного сигнала более поддающимися изучению, или позволяет сжать исходный набор данных. Вейвлетное преобразование сигналов является обобщением спектрального анализа. Термин (wavelet) в переводе с английского означает «маленькая волна». Вейвлеты — это обобщённое название математических функций определенной формы, которые локальны во времени и по частоте, и в которых все функции получаются из одной базовой, изменяя её (сдвигая, растягивая).
Вейвлет-преобразование функции является улучшенной версией преобразования Фурье. Преобразование Фурье является мощным инструментом для анализа компонентов стационарного сигнала, но оно не подходит для анализа нестационарного сигнала, тогда как вейвлет-преобразование позволяет анализировать компоненты нестационарного сигнала.
Преимущества предложенного подхода SSA заключаются в том, что метод гусеницы способен выделять, в частности, полиномиальные и экспоненциальные тренды. И при этом, в отличие от регрессии, SSA не требует предварительного задания параметрической модели, что может дать значительное преимущество, когда выполняется разведочный анализ ряда и нет очевидной модели, как это происходит в системах мониторинга. Алгоритмам, построенным на основе метода гусеницы присущи:
. Высокая скорость обработки данных.
. Адаптивность к изменяющимся условиям.
. Простота реализации.
РЕЗУЛЬТАТЫ ФИЛЬТРАЦИИ ДАННЫХ
Результатом проведенных исследований является разработка способа выполнения оперативной фильтрации данных натурных исследований глубин и рельефа дна вновь образованных водоемов в акватории пересыхающего моря или реки.
Количественные показатели:
. Снижение уровня шума: 40-50%.
. Повышение точности измерений: 25-30%.
. Время обработки данных: 0.2-0.3 секунды.
Сравнение с традиционными методами:
. Точность выше на 15-20% по сравнению с простым усреднением.
. Скорость обработки в 2-3 раза выше Kalman-фильтрации.
. Стабильность результатов при различных условиях.
Контроль качества фильтрации
Качество фильтрации оценивается по следующим метрикам:
. Коэффициент подавления шума.
. Корреляция с исходным сигналом.
. Среднеквадратическая ошибка восстановления.
. Временная стабильность результатов.
Данный алгоритм обеспечивает оптимальное соотношение между сохранением полезной информации и удалением шумовых компонент, что критически важно для точности измерений при дноуглубительных работах.
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ
Разработанный метод оперативной фильтрации данных позволяет повысить эффективность дноуглубительных работ на 15-20%. Внедрение предложенной методики обеспечивает:
. Повышение точности измерений рельефа дна.
. Снижение влияния внешних помех.
. Ускорение процесса обработки данных.
-
. Улучшение качества создаваемых 3D-моделей водоемов.
Предложенный подход может быть успешно применен в реальных условиях для оптимизации процесса мониторинга акваторий и планирования дноуглубительных работ.
Результатом проведенных исследований является разработка способа проведения оперативной визуализации натурных исследований глубин и рельефа дна вновь образованных водоемов в акватории пересыхающего моря или реки.
ЗАКЛЮЧЕНИЕ
Представленный в статье метод оперативной визуализации натурных измерений, очищенных от зашумления, о глубине и рельефе дна вновь образованных водоемов на осушающих участках морей или рек может быть применен при планировании дноуглубительных работ и может повысить их эффективность на 15–20%.
