A Novel Reference Model for Intelligent and Comfortable Longitudinal Vehicle Control: Theory, Optimization, and Validation

Author: Flavien H. Somda, Désiré Guel, Kisito K. Kaboré, Antoine Schorgen
Journal: International Journal of Intelligent Systems and Applications @ijisa
Article in issue: 2 vol.18, 2026.
Free access
This paper introduces a novel reference model for intelligent longitudinal vehicle control, designed to enhance both safety and passenger comfort. The proposed model dynamically adjusts the follower vehicle’s acceleration based on its penetration distance relative to the lead vehicle, ensuring smooth speed transitions and adaptive deceleration. By preventing abrupt braking, the model maintains a safe inter-vehicle distance while reducing passenger discomfort. Key contributions include an analytical derivation of the follower vehicle’s dynamics and a novel formulation of the safety distance using the Lambert W function, enabling precise parameter optimization. A dedicated optimization framework ensures compliance with safety constraints while minimizing excessive acceleration and jerk. The model’s performance is validated through numerical simulations in various driving scenarios, including emergency braking, steady-speed following, variable-speed adaptation, and stop-and-go traffic. Results demonstrate its effectiveness in maintaining safety while enhancing ride comfort through gradual and controlled deceleration. The proposed approach is computationally efficient and well-suited for Advanced Driver Assistance Systems (ADAS) and autonomous vehicles. Future research will explore its integration with lateral control strategies, real-time adaptability, and machine learning techniques for further performance optimization in dynamic driving environments.
Longitudinal Vehicle Control, Nonlinear Control Model, Adaptive Deceleration, Safety Distance Optimization, Intelligent Transportation Systems, Advanced Driver Assistance Systems (ADAS)
Short address: https://sciup.org/15020327
IDR: 15020327 | DOI: 10.5815/ijisa.2026.02.12
Text of the scientific article A Novel Reference Model for Intelligent and Comfortable Longitudinal Vehicle Control: Theory, Optimization, and Validation
The development of advanced driver assistance systems (ADAS) and autonomous vehicles has been a focal point in modern automotive engineering, aiming to enhance both safety, sustainability and driving comfort [1-4]. To improve comfort further, [1] suggests extending the reference model space by incorporating an additional zone where the intervehicle distance is dynamically adjusted based on driving conditions. Traditional Adaptive Cruise Control (ACC)
systems employ linear control techniques, such as Proportional-Integral-Derivative (PID) control [5], to regulate vehicle speed based on the distance to the preceding vehicle [6]. However, these approaches often fail to capture the nonlinear dynamics of real-world driving conditions, especially under sudden acceleration or braking events [7].
To address these limitations, recent research has explored advanced control methodologies, such as Model Predictive Control (MPC) [8] and Reinforcement Learning-based strategies [9-11]. These approaches enhance adaptability but often require extensive computational resources and are not always robust under real-time constraints [12].
In this study, we propose a novel exponential nonlinear model to govern the acceleration of the follower vehicle.
Our approach is inspired by the need to dynamically adjust the safety distance in response to changing traffic conditions while ensuring smooth and comfortable transitions [13]. By integrating adjustable parameters ( α and c), our model introduces an exponential response mechanism that allows for a more natural adaptation to the relative velocity and acceleration of the leading vehicle. The proposed model is designed with practical constraints in mind, such as the maximum braking capacity Bmax of the follower vehicle, ensuring that the system remains feasible under real-world conditions. By combining rigorous mathematical analysis with a focus on safety and comfort, this work advances state-of-the-art in longitudinal vehicle control and provides a foundation for the development of next-generation ADAS and autonomous driving systems.
The main objective of this study is to design a reference model for longitudinal vehicle control that ensures both safety and passenger comfort under various driving scenarios, including emergency braking, variable-speed following and stop-and-go traffic. Unlike control strategies such as PID, Model Predictive Control or Reinforcement Learning, the proposed model introduces a nonlinear acceleration law for the follower vehicle based on the concept of penetration distance, enabling a smooth deceleration profile that dynamically adjusts to traffic conditions. A key novelty of our approach lies in the analytical derivation of the safety distance using the Lambert W function, which allows for an exact and tractable expression that connects safety constraints with initial velocity and model parameters. This mathematical formulation not only enables a low-complexity design, making the model suitable for realtime embedded applications but also provides deeper insight into system behaviour while enabling precise parameter tuning to meet both safety and comfort criteria.
The proposed model adjusts the follower vehicle’s acceleration dynamically using a nonlinear exponential function of the penetration distance and its rate of change. This design allows the system to react smoothly and proportionally to the severity of potential collisions, thereby improving passenger comfort. To ensure that both safety (e.g., respecting maximum braking capacity) and comfort (e.g., limiting jerk) are maintained, we formulate and solve an optimization problem to determine the optimal values of the model parameters. The optimization framework minimizes a cost function that combines safety and comfort penalties, subject to realistic physical constraints. This dual-level design, nonlinear dynamic adjustment combined with constraint-aware parameter tuning, ensures robust and practical vehicle behaviour in real-world driving scenarios.
However, this study has several limitations. The proposed model is validated through numerical simulations only and does not yet account for real-world uncertainties such as sensor noise, actuation delays, or diverse road conditions. Additionally, the control parameters are optimized offline, limiting the model's adaptability in dynamic environments. The current work also focuses on a simplified two-vehicle scenario, and scalability to more complex traffic situations remain to be explored. These aspects are discussed in more detail in the Limitations and Future Work section.
The remainder of this paper is organized as follows. Section 2 defines the problem formulation, the vehicle dynamics, and the constraints considered in the model. Section 3 presents the proposed reference model in detail, including its theoretical foundations and analytical derivations. Section 4 discusses the optimization of the model parameters to ensure safety and comfort. Section 5 provides numerical simulations and validates the model across various driving scenarios. Section 6 explores practical implications and potential applications in ADAS and autonomous vehicles. Finally, Section 8 concludes the paper and outlines future research directions.
2. Problem Formulation 2.1. Context and Objectives
The longitudinal control of vehicles is a critical component of Advanced Driver-Assistance Systems (ADAS) and autonomous driving technologies. The primary objective is to maintain both a safe inter-distance and passenger comfort. Traditional control strategies, such as Proportional-Integral-Derivative (PID) controllers and Model Predictive Control (MPC), often face challenges in dynamically adapting to varying driving conditions, particularly in scenarios requiring sudden deceleration or acceleration. This work aims to address these limitations by proposing a novel reference model that ensures both safety and comfort through a mathematically rigorous framework.
-
2.2. System Description
Consider two vehicles on a straight road: a follower vehicle (equipped with the proposed control system) and a lead vehicle. The positions of the follower and lead vehicles are denoted by x1(t) and x2(t), respectively. The relative distance between the two vehicles is defined as:
dr ( t ) = x 2( t ) - x 1( t )
To ensure safety, a minimum safety distance d0 is introduced. The penetration distance d(t) is defined as:
d ( t ) = d 0 - dr ( t )
The control system is activated only when d ( t ) ≥ 0 , that is, when the follower vehicle is within the safety distance d o .
If d ( t ) < 0 the follower vehicle is at a safe distance and is not subject to any control restrictions.
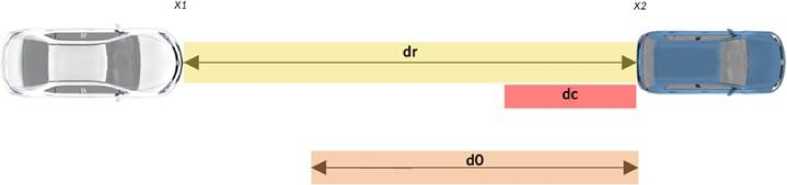
Fig.1. Parameters of the model space with the follower vehicle operating within a free zone
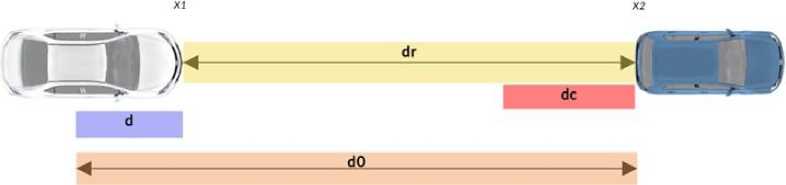
Fig.2. Parameters of the model space with the follower vehicle operating within a constrained zone
-
2.3. Dynamics of the Follower Vehicle
The acceleration of the follower vehicle, x ( t ) is governed by the proposed reference model:
x.. (t) = -αecd(t)d(t)d(t), (3)
where:
-
• α and c are positive parameters to be optimized for safety and comfort.
-
• e cd ( t ) introduces a nonlinear response that adapts the deceleration based on the severity of the penetration
distance.
-
• d ( t ) is the rate of change of the penetration distance, representing the relative velocity between the two vehicles.
-
2.4. Safety and Comfort Constraints
This dynamic acceleration control (Eq. 3) is formulated as a nonlinear exponential function of penetration distance d ( t ) and its derivative, which provides adaptive deceleration based on traffic conditions.
This formulation also ensures that the control system responds more aggressively as the penetration distance increases, thereby preventing collisions while maintaining smooth deceleration profiles.
The proposed model must satisfy two primary constraints:
-
• Safety: The follower vehicle must maintain a safe distance from the leader to ensure that it stops without collision, even if the leader vehicle comes to an abrupt halt. This means that the gap between the follower and the leader should be sufficient for the follower to come to a complete stop under any circumstances, preventing a collision.
Furthermore, the deceleration must not exceed the maximum braking capacity B , | x ( t )| ≤ B
-
• Comfort: Acceleration and deceleration profiles must be smooth to minimize passenger discomfort. This is
-
2.5. Problem Statement
achieved by ensuring that the jerk (rate of change of acceleration) remains within acceptable limits.
The problem can be formally stated as follows:
Given
-
• The dynamics of the follower vehicle: x ( t ) = - α e cd ( t ) d ( t ) d ( t )
-
• The maximum braking capacity B
-
• Initial conditions: x 1(0) , x . (0) , x 2(0) , and x . (0)
Find
-
• The optimal values of α and c that minimize a cost function that combines comfort and safety inter-distance. Subject to
-
• Safety inter-distance constraint: d should not be greater than the distance traveled by the vehicle at initial speed for a certain amount of time (e.g., 2.5 seconds).
-
• Braking capacity constraint: | x ( t )| ≤ B
-
• Comfort constraint: Limits on jerk.
-
2.6. Key Assumptions
• The trajectory of the lead vehicle x(t)is known or can be accurately estimated.
• The road is straight and flat, with no external disturbances (e.g., wind, slopes).
• The sensors on the follower vehicle provide accurate measurements of d(t) and d(t)
3. Proposed Reference Model
3.1. Model Formulation
The proposed reference model for longitudinal vehicle control is based on a nonlinear formulation of the acceleration dynamics of follower vehicle. The acceleration of the follower vehicle, x ( t ), is governed by equation (3):
x (t) = -αecd(t)d(t)d(t), where:
-
• d ( t ) = d - d ( t ) is the penetration distance, representing the extent to which the follower vehicle has
encroached upon the safety distance d
-
• d ( t ) is the rate of change in the penetration distance, equivalent to the relative velocity between the follower and
lead vehicles.
-
• α and c are positive parameters that control the aggressiveness and adaptability of the control response.
-
3.2. Key Features of the Model
This formulation ensures that the control system responds dynamically to changes in penetration distance, with the expo- nential term e cd ( t ) introducing a nonlinear scaling factor that amplifies the response as d ( t ) increases.
The proposed model exhibits several key features that distinguish it from traditional control strategies:
Adaptive Response
-
• The term e cd ( t ) ensures that the control system reacts more aggressively as the penetration distance d ( t ) increases, providing a smooth but effective response to potential collision risks.
-
• When d(t ) is small (that is, the follower vehicle is close to the safety distance), the control action is gentle, prioritizing the comfort of the passengers.
Safety Guarantees
-
• The model is inherently safe by design, as the prescribed safety distance ensures that the follower vehicle can come to a complete stop without colliding with the leader, even in the event of a sudden halt of the leader.
-
• The deceleration is bounded by the maximum braking capacity of the vehicle Bma , ensuring the feasibility under real world conditions.
Comfort-oriented Design
-
• The smooth, nonlinear response minimizes abrupt changes in acceleration, reducing passenger discomfort.
-
• The model inherently limits jerk (the rate of change in acceleration), further enhancing comfort.
-
3.3. Analytical Derivation of Velocity Profile
.
The velocity of the follower vehicle, x ( t ), can be derived by integrating the acceleration equation. The resulting expression is:
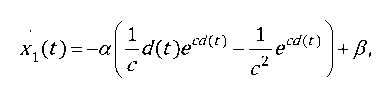
. (
X(t) = - a I d(t)ecc d )
where
.
в = x-(0) - — c2
is a constant determined by the initial conditions. This analytical expression provides a direct relationship between the penetration distance d(t) and the velocity of the follower vehicle, enabling precise control over the behavior of the system.
-
3.4. Safety Distance d
.
Using equation (4), d can be formulated as a function of x and d :
which simplifies to
thus, leading to
c(X - в ) = de cd - 1 ecd
a c
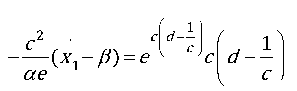
c '
W--X - в ) = W e
a e
where W denotes the Lambert W function.
The penetration distance is then given by:
1 d(t) = -W
c
a e
1(t)
+
)))
c
Since the Lambert W function is monotonically increasing over the interval —, +^ , it follows that the penetration distance reaches its maximum when x (t) = 0 .
Consequently, the safety distance d can be expressed as:
1 d o = cW

a e V
.
x1(0)
—
a
+ C + dc
where:
.
-
• x (0) is the initial velocity of the follower vehicle.
-
• d is a constant that represents the safety distance when both leader and follower are stopped.
-
3.5. Acceleration and Jerk Profile in Function of d
This formulation ensures that the safety distance d is dynamically adjusted based on the initial velocity of the follower vehicle and the system parameters a and c .
Acceleration profile d = x — x = —adeCdd — x(10)
By integration of equation (10), one obtains that:
d = — aecd (d — 1) — x + в(11)
cc 2
Substitution of d in equation (3) by its expression in equation (11}) leads to
..2.
x (t) = a d^d) (d(t) — - + adteecd )x (t) — в)(12)
1cc
Equation (12) represents the follower vehicle’s acceleration as a function of initial conditions and the leader’s speed. This formulation allows for the analysis of follower acceleration based on penetration distance.
Penetration distance d (m)
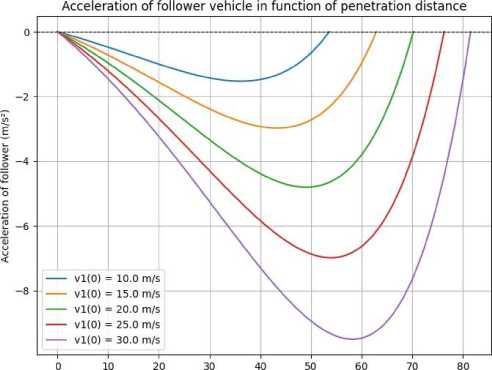
Fig.3 . Evolution of acceleration as a function of d for different values of initial velocity v 1(0)
Fig.3 illustrates the relationship between the acceleration of the follower vehicle and the penetration distance, with parameters set to α = 0 . 0043 and c = 0 . 0131. The graph indicates that as the initial speed increases, both the stopping distance and the magnitude of the braking rate generated by the model also increase. The leader vehicle is assumed to be at stop. Therefore, the plots also illustrate the behavior of the model during an emergency stop scenario.
Jerk profile d x dd
a_ ^cd c



в ( 1 + cd)ecd
d x
= —1 d dd
where expression of d is given in (11). It then follows that:
... 2
x = [ a e2cd I 2cd2
1 c {
—
- | + a x7 — в 1 ( 1 + cd ) ecd ].[ — a ecd(d — 1) — x7 + в ] c ) 2 d c c
Fig.4 illustrates the relationship between the jerk of the follower vehicle and the penetration distance, with parameters set to α = 0 . 0043 and c = 0 . 0131. The graph indicates that as the initial speed increases, both the stopping distance and the magnitude of the jerk generated by the model also increase. The leader vehicle is assumed to be at stop. Therefore, the plots also illustrate the behavior of the model during an emergency stop scenario.
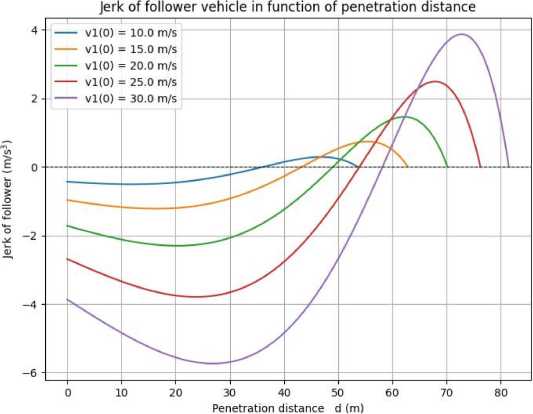
Fig.4 . Evolution of jerk as a function of d for different values of initial velocity v 1(0)
-
3.6. Advantages Over Existing Models
The proposed model offers several advantages over traditional control strategies:
Nonlinear Adaptability
-
• Unlike linear models (e.g., PID controllers), the proposed model adapts dynamically to varying driving conditions, providing a more robust and flexible response.
Analytical Tractability
-
• The model’s analytical expressions for velocity and safety distance enable precise tuning and optimization of the control parameters.
Safety and Comfort Balance
• The model inherently balances safety and comfort, ensuring collision avoidance while minimizing passenger discomfort.
3.7. Practical Implementation
4. Parameter Optimization4.1. Problem Formulation
The proposed model can be implemented in real-time control systems for ADAS and autonomous vehicles. Its low computational complexity and reliance on measurable quantities (e.g., relative distance and velocity) make it suitable for practical applications. Additionally, the model’s parameters (α and c) can be optimized offline or adapted online using machine learning techniques to enhance performance further.
In this section, we describe the methodology for optimizing the parameters α and c in the proposed longitudinal control model. The goal is to ensure both safety and comfort for the following vehicle while adhering to the physical constraints of the system.
The Parameters α and c are optimized via an L-BFGS-B algorithm (Eq. 16), using a cost function that penalizes unsafe deceleration, large jerk, and excessive safety distance. Constraints such as maximum braking capacity and jerk limits are explicitly considered.
The control model is described by the following equations:
X (t) = -aecd(t )d(t)d(t), where x (t) represents the position of the following vehicle, d(t) = d0 - d (t) is the penetration distance, and dr (t) is the actual distance between the following and leading vehicles. The safety distance d is given by:
d o = -W

a e
v 1(0)
a
+ 1 + dc
where W denotes the Lambert W function, and v is the initial velocity of the following vehicle.
The parameters α and c must be optimized to satisfy the following constraints:
-
• Safety: The maximum deceleration must not exceed — 10 m/s 2 .
-
• Comfort: The jerk (derivative of acceleration) must remain below 4 m/s 3 in absolute value.
-
• Safety Distance: The safety distance d о must not be excessively large to avoid inefficient driving.
-
4.2. Cost Function
To formalize these constraints, we define a cost function J (a ,c ) that penalizes deviations from the objectives:
J (a ,c) = w • Deceleration _Penalty+w2 • Distance _Penalty+w3 • Jerk _ Penalty (16)
where:
Decelera t ion _ Penalty= 2 maxC-a/O-B max ) 2
(e.g 10 m/s 2 ).
penalizes decelerations rates above B max
Distance_Penalty=max(d -d ,0)2 penalizes safety distances exceeding d (e.g d = distance traveled at speed v for 2.5s.
Jerk_Penalty=^ max(|jerk(t)|-Jmax
0) 2 penalizes jerks above J
(e.g 4m/s).
The weights w , w and w allow for adjusting the relative importance of each constraint.
-
4.3. Optimization Method
-
4.4. Optimization Results
-
4.5. Conclusion
We employ the L-BFGS-B algorithm [14, 15] to minimize the cost function J(a,c ) . This algorithm is well-suited for problems with bound constraints, enabling us to restrict a and c to physically realistic intervals (e.g., a e [0.001,0.1] and c e [0.001,0.1]).
For each value of the initial velocity v , we solve the optimization problem and obtain the optimal values of α and c.
The results are illustrated in Fig.5, which shows the evolution of α and c as functions of v 1(0) . The exact optimal values of parameters α and care provided in table 1.
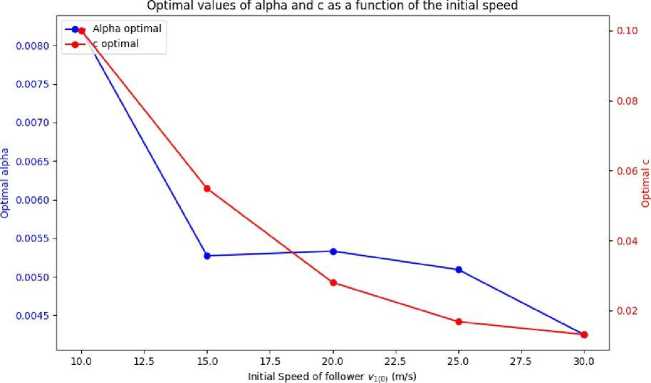
Fig.5. Evolution of the optimal parameters α and c as functions of the initial velocity v 1(0) . The blue and red curves represent α and c, respectively
The optimization of the parameters α and c ensures safe and comfortable longitudinal control for the following vehicle. The findings open avenues for future work, including the integration of external disturbances and experimental validation of the model.
Table 1. Optimal values of α and c for the initial speed of the follower vehicle
|
v 1(0) |
α |
C |
|
10 |
0.0082 |
0.1000 |
|
15 |
0.0053 |
0.0549 |
|
20 |
0.0053 |
0.0280 |
|
25 |
0.0051 |
0.0168 |
|
30 |
0.0043 |
0.0131 |
5. Simulation and Validation 5.1. Simulation Setup
To validate the proposed reference model, a comprehensive set of numerical simulations was conducted. The simulation environment was designed to replicate real-world driving scenarios, including emergency braking, variablespeed following, and stop-and-go traffic. The following setup was used:
Vehicle Dynamics
-
• The follower and lead vehicles were represented as point masses with no inertia, focusing solely on their positional dynamics without accounting for physical properties such as mass or friction. This abstraction simplifies the modeling process and allows for a clearer analysis of the positional relationships and control strategy. The follower vehicle specifically implemented the proposed control model, enabling the evaluation of its performance in maintaining safe and efficient behavior relative to the lead vehicle.
Initial Conditions:
-
• Initial positions, velocities, and accelerations were defined for both vehicles to represent typical driving conditions.
Sensor and Actuator Models:
-
• In this setup, sensor noise and actuator delays were intentionally disregarded to simplify the analysis and focus on the core dynamics of the system. This assumption allows for a more straightforward evaluation of the model’s behavior under ideal conditions, without the additional complexities introduced by real-world imperfections such as measurement inaccuracies or response delays in the actuators.
Technical environment:
-
• The simulations are conducted using Python, leveraging the numpy, scipy, and matplotlib libraries.
-
5.2. Scenarios
The following scenarios were simulated to evaluate the performance of the proposed model.
Emergency Braking
The lead vehicle stops with a hypothetical infinite braking rate, testing the ability of the follower vehicle to maintain a safe distance while minimizing discomfort, α = 0 . 0043, c = 0 . 0131 and d c = 5 m
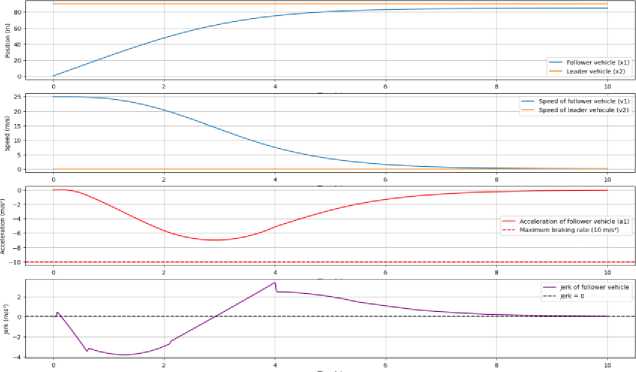
Fig.6. Evolution of the dynamics of the follower. Initial velocity of the follower is v 1(0) = 25m/S and the leader is stopped
Constant Speed of leader
The lead vehicle runs at constant speed of 20 m/s, simulating a steady state driving on highway.
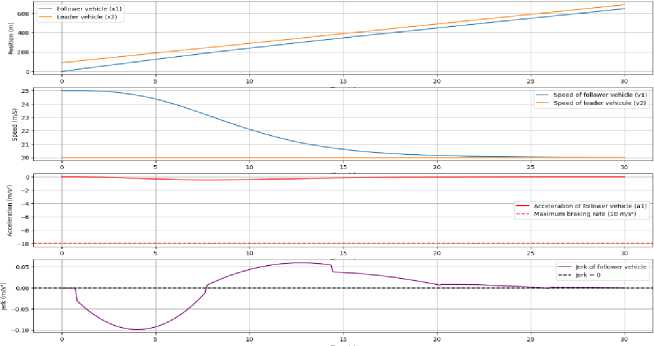
Fig.7. Evolution of the dynamics of the follower. Leader is running at constant speed v = 20m/s and follower initial speed is 25 m/s
Variable-Speed Following
The lead vehicle undergoes periodic acceleration and deceleration, simulating highway driving conditions.
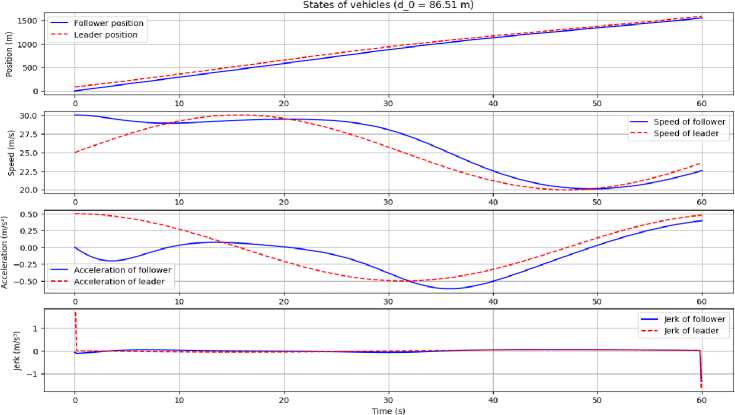
Fig.8. Evolution of the dynamics of the follower and Leader. The acceleration profile of leader is materialized through a sinusoidal variation a 2( t ) = 0.5 cos (0.1* t ) with an initial speed v 2 = 25 m/s. Follower initial speed is 30 m/s
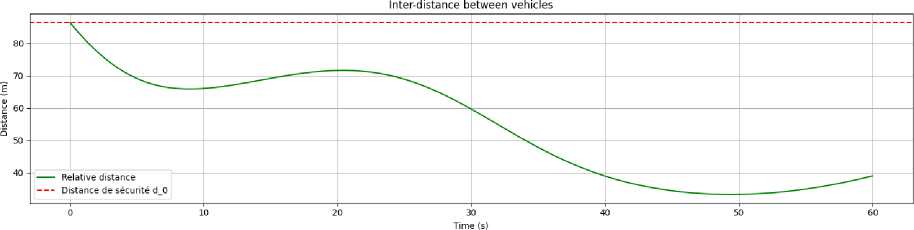
Fig.9. Evolution of the inter-distance. The acceleration profile of leader is materialized through a sinusoidal variation a2(t) = 0.5cos(0.1*t) with an initial speed v2 = 25 m/s. Follower initial speed is 30 m/s
Stop-and-Go Traffic
The lead vehicle repeatedly stops and starts, simulating urban traffic conditions.
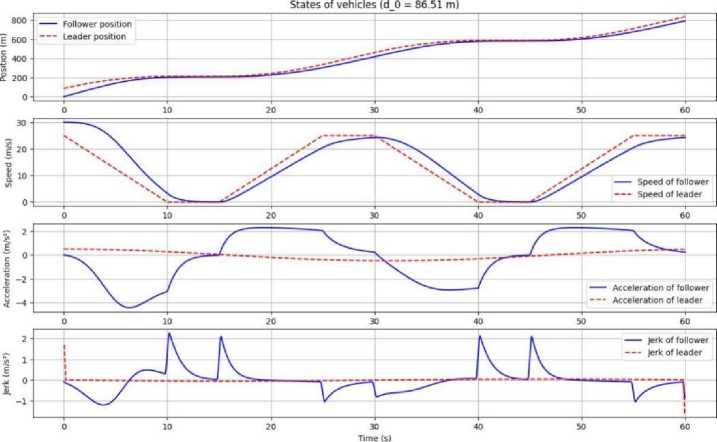
Fig.10. Evolution of the dynamics of the follower and Leader. Leader goes through a cycle of deceleration, stop, acceleration from an initial speed v 2 = 25m/s. Follower initial speed is 30 m/s
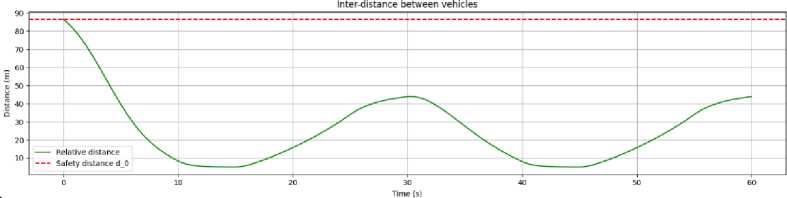
Fig.11. Evolution of the inter-distance. Leader goes through a cycle of deceleration, stop, acceleration from an initial speed v 2 = 25m/s. Follower initial speed is 30 m/s
-
5.3. Results
The simulation results in demonstrate the effectiveness of the proposed model in maintaining safety and comfort across all scenarios:
Emergency Braking
-
• The follower vehicle successfully avoids collisions while maintaining smooth deceleration profiles as shown in Fig.6.
-
• The braking capacity constraint is respected.
Constant-Speed of leader
-
• As shown in Fig.7, the speed of the follower vehicle progressively decreases to the speed of the leader while maintaining a safe inter-distance.
Variable-Speed Following
-
• As shown in Fig.8 and Fig.9, the follower vehicle adapts smoothly to changes in the lead vehicle’s speed, with minimal oscillations in acceleration and jerk.
Stop-and-Go Traffic
-
• Fig.10 and Fig.11 show how the follower vehicle responds promptly to the stops and starts of the lead vehicle, ensuring safe and comfortable driving.
-
5.4. Comparison with Existing Methods
The proposed model was evaluated against a previous reference control strategy outlined in [3]. In the scenario under consideration, the leader vehicle is stopped, while the follower starts with an initial velocity of 25 m/s.
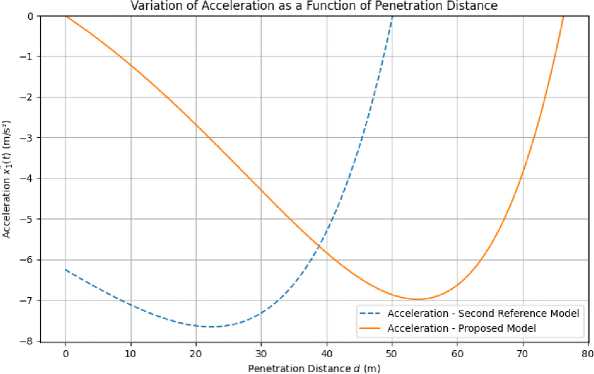
Fig.12. Variation of acceleration in function of penetration distance
Safety
-
• Both models are designed inherently to ensure safety. However, for the same maximum braking capacity, the safety distance in the previous model is shorter than that of the current reference model. This difference arises because the previous model applies a sudden and strong deceleration as soon as the safety distance is reached (more than 6 m/s 2 in Fig.12), while the current proposed model starts decelerating progressively from zero.
Comfort
-
• In Fig. 13, both jerks are reasonable for an emergency braking scenario even if the proposed reference model exhibits a jerk with a higher amplitude compared to the previous reference model. However, as shown in Fig. 12, the acceleration profile of the proposed model is more gradual, with slightly lower deceleration amplitude than the previous reference model, which initiates braking abruptly. It should be noted that both models start the braking process once their respective safety distance is reached.
-
5.5. Discussion
-
5.6. Comparison with State-of-the-Art Control Models
The simulation results validate the effectiveness of the proposed reference model in achieving the dual objectives of safety and comfort. The model’s nonlinear formulation and adaptive response provide significant advantages over traditional control strategies, particularly in dynamic and uncertain driving conditions. The results also highlight the importance of optimizing the parameters α and c to achieve the desired balance between safety and comfort.
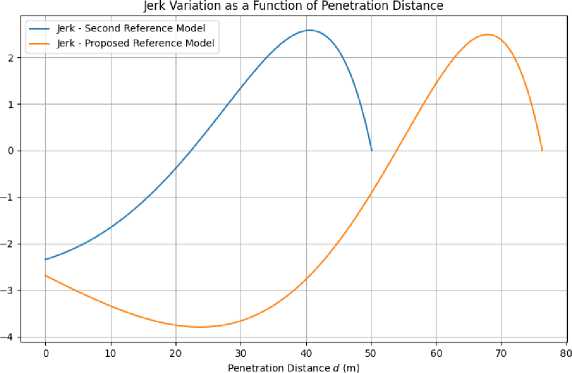
Fig.13. Variation of jerk in function of penetration distance
In addition to the comparison with the previous reference model [3], it is essential to evaluate the proposed approach in the context of the current state of the art in longitudinal control systems.
Traditional control techniques such as Proportional-Integral-Derivative (PID) controllers are widely adopted for their simplicity, but they struggle to adapt to nonlinear or rapidly changing traffic conditions and often result in abrupt control actions that negatively affect passenger comfort. Model Predictive Control (MPC), on the other hand, offers strong adaptability and can explicitly handle constraints; however, its computational demands make it less suited for real-time applications in embedded systems. Reinforcement learning approaches have recently gained attention for their ability to learn adaptive behaviors from data, but they require extensive training and offer limited interpretability and safety guarantees.
The proposed model bridges this gap by offering a nonlinear analytical formulation with closed-form expressions for velocity and safety distance, including the novel use of the Lambert W function. It is computationally lightweight, naturally handles comfort through smooth acceleration and jerk profiles, and includes a built-in mechanism to enforce braking capacity constraints. This combination of analytical rigor and practical simplicity makes it particularly suitable for integration into Advanced Driver Assistance Systems (ADAS) and real-time autonomous control modules.
Table 2. Qualitative comparison of the proposed model with current longitudinal control approaches
|
Method |
Adaptability |
Safety Guarantee |
Comfort |
Real-Time Feasibility |
|
PID Controller |
Low |
No |
Low |
High |
|
Model Predictive Control (MPC) |
High |
Yes |
Medium |
Low |
|
Reinforcement Learning |
High |
No |
High |
High |
|
Proposed Model |
Medium-High |
Yes (Analytical) |
High |
High |
*The proposed model exhibits dynamic response to driving conditions through nonlinear penetration-distance-based control. However, as parameters are optimized offline, real-time learning or adaptation is not yet integrated.
6. Practical Implementations and Applications 6.1. Integration into Advanced Driver-assistance Systems (ADAS)
The proposed reference model is highly suitable for integration into existing ADAS frameworks, particularly in systems such as:
Adaptive Cruise Control (ACC)
-
• The model can enhance ACC systems by providing smoother and safer speed regulation, especially in dynamic traffic conditions.
-
• Its ability to adapt to varying penetration distances ensures robust performance in scenarios such as sudden deceleration or stop-and-go traffic.
Automatic Emergency Braking (AEB)
-
• The model’s nonlinear response and safety guarantees make it ideal for AEB systems, where rapid yet controlled deceleration is critical to avoiding collisions.
Traffic Jam Assist
-
• In congested traffic conditions, the model ensures comfortable and safe following distances, reducing driver fatigue, and improving overall traffic flow.
-
6.2. Applications in Autonomous Vehicles
The proposed model is particularly relevant for autonomous vehicles, where safety and comfort are paramount. Key applications include:
Longitudinal Control in Autonomous Driving
-
• The model can serve as a core component of the longitudinal control module in autonomous vehicles, ensuring safe and comfortable driving in various scenarios.
Platooning
-
• In vehicle platooning systems, where multiple vehicles travel in close formation, the model can maintain safe inter-vehicle distances while minimizing energy consumption and improving traffic efficiency.
Urban and Highway Driving
-
• The model’s adaptability to different driving conditions makes it suitable for both urban environments (e.g., intersections, traffic lights) and highways (e.g., high-speed cruising, lane changes).
-
6.3. Benefits for Safety and Comfort
The proposed model offers several practical benefits:
Enhanced Safety
-
• By design, the safety distance adopted by the model is also a stop distance that prevents from the risk of collisions.
-
• Its adaptive response ensures robust performance in unpredictable driving scenarios
Improved Comfort
-
• The model’s smooth acceleration and deceleration profiles minimize passenger discomfort, particularly in scenarios requiring frequent speed adjustments.
-
• The low value of jerk ensures a pleasant driving experience.
Energy Efficiency
-
• By optimizing acceleration and deceleration patterns, the model can contribute to reduced fuel consumption and lower emissions, particularly in stop-and-go traffic.
-
6.4. Implementation Considerations
To facilitate the practical implementation of the proposed model, the following considerations should be addressed:
Computational Efficiency
-
• The model’s low computational complexity makes it suitable for real-time implementation on embedded systems.
-
• Efficient algorithms can be developed to compute the control actions in real time.
Sensor Integration
-
• The model relies on accurate measurements of the relative distance and velocity between vehicles, which can be obtained using sensors such as radar, lidar, or cameras.
-
• Sensor fusion techniques can be employed to enhance measurement accuracy and robustness.
Parameter Adaptation
-
• The parameters α and c can be adapted online using machine learning techniques to further optimize performance under varying driving conditions.
-
6.5. Future Research Directions
The proposed model opens several avenues for future research:
Extension to Lateral Control
-
• Integrating the proposed longitudinal control model with lateral control strategies to enable fully autonomous driving.
Learning-Based Adaptation
-
• Using reinforcement learning or other machine learning techniques to adapt the model’s parameters in real time based on driver behavior and environmental conditions.
Validation in Real-World Scenarios
• Conducting field tests to validate the model’s performance in real-world driving conditions, including adverse weather and complex traffic situations.
6.6. Broader Impact
7. Limitation and Future Work
8. Conclusions
The proposed model has the potential to significantly improve road safety and passenger comfort, contributing to the widespread adoption of ADAS and autonomous vehicles. By addressing the dual challenges of safety and comfort, the model aligns with the goals of reducing traffic accidents, enhancing mobility, and improving the overall driving experience.
Although the proposed model has demonstrated promising results in simulation, several limitations must be acknowledged. First, the current study focuses on a two-vehicle scenario and does not evaluate the model’s scalability to larger fleets or more complex traffic environments. In future work, we will investigate the behavior of the model under varying traffic densities, heterogeneous vehicle types, and diverse road conditions, including curves, intersections, and highway merges. This will help assess the model’s adaptability and robustness in real-world complexity. Second, while emergency braking and stop-and-go scenarios were considered, a deeper error analysis is needed to identify potential failure cases. For instance, extreme situations such as high-speed cut-ins, sensor inaccuracies, or abrupt lead vehicle stops could challenge the control system. Formal robustness analysis and stress testing under such conditions are planned. Third, the model’s sensitivity to key parameters such as penetration distance thresholds, safety margins, or jerk limits remains to be explored. Understanding these effects will enable users to fine-tune the system for specific operational contexts. We plan to address this using analytical sensitivity studies and Monte Carlo simulations. Fourth, the current version of the model uses fixed parameters optimized offline. To improve adaptability, we plan to develop a real-time adaptive version of the control system, capable of adjusting its parameters based on environmental feedback and driving behavior. This will involve investigating the use of machine learning techniques such as reinforcement learning and deep learning to optimize performance in unpredictable or rapidly changing scenarios. Fifth, while this work focuses on longitudinal control, full vehicle autonomy requires coordination of both longitudinal and lateral dynamics. Therefore, extending the proposed control framework to integrate lateral control strategies such as lane keeping or obstacle avoidance will be an essential step toward comprehensive autonomous driving systems. In addition, the model could be extended to other application domains, including public transportation, fleet coordination, and logistics. These contexts would benefit from the model’s ability to ensure adaptive, safe, and comfortable motion in dynamic environments. Finally, to complement the technical validation, we aim to conduct user studies involving human drivers and passengers. Assessing their perception of safety and comfort will provide valuable feedback for refining the control model and improving its acceptance and usability in real-world systems.
In this paper, we have presented a novel reference model for longitudinal vehicle control that addresses the critical challenges of maintaining safety and ensuring passenger comfort. The proposed model is based on a nonlinear formulation of the acceleration dynamics of the follower vehicle, governed by the equation x (t) = -αecd(t)d(t)d(t) , where d(t) represents the penetration distance, and α and c are tunable parameters. This model is specifically designed to activate only when the follower vehicle is within the safety distance d , ensuring a smooth and adaptive response to potential collision risks. Key contributions of this work include:
-
• The derivation of analytical expressions for the follower vehicle’s velocity and the safety distance d , the latter expressed in terms of the Lambert W function.
-
• An optimization framework to determine the optimal values of α and c , balancing safety and comfort while respect- ing the vehicle’s maximum braking capacity B .
-
• Extensive numerical simulations demonstrating the model’s effectiveness in maintaining safe inter-vehicle distances while minimizing passenger discomfort.
The simulation results validate the effectiveness of the proposed model in achieving the dual objectives of safety and comfort. The model’s nonlinear formulation and adaptive response provide significant advantages over traditional control strategies, particularly in dynamic and uncertain driving conditions. The results also highlight the importance of optimizing the parameters α and c to achieve the desired balance between safety and comfort.
In conclusion, the proposed model represents a significant advancement in longitudinal vehicle control, offering a mathematically rigorous and practically feasible solution for next-generation ADAS and autonomous driving systems. By addressing the dual challenges of safety and comfort, the model has the potential to significantly improve road safety and passenger comfort, paving the way for future research on adaptive and learning-based control strategies.
Author Contributions Statement
Flavien H. Somda – Conceptualization, Theoretical Analysis, Model Derivation, and Supervision:
Proposed the original research idea of a nonlinear exponential reference model for longitudinal vehicle control. Developed the theoretical framework, including the analytical derivation of the model and the safety distance formulation using the Lambert W function. Supervised the overall research process, including model design, optimization strategy, and validation methodology.
Désiré Guel – Numerical Experiments and Scenario Design:
Contributed to the design and implementation of the simulation environment using Python (NumPy, SciPy, Matplotlib). Managed the preparation of simulation scenarios (emergency braking, stop-and-go, variable-speed conditions) and ensured the correct integration of the proposed model into the computational framework.
Kisito K. Kaboré – Parameter Optimization, Numerical Simulation, and Performance Evaluation:
Led the parameter optimization process (α and c) using the L-BFGS-B algorithm. Conducted extensive numerical simulations and validated the model performance across multiple driving scenarios. Evaluated safety and comfort metrics (deceleration, jerk, safety distance) and benchmarked the proposed model against existing approaches.
Antoine Schorgen – Results Analysis, Visualization, and Validation:
Performed detailed analysis of simulation results, including interpretation of acceleration and jerk profiles. Contributed to the generation and validation of performance visualizations and ensured the robustness and consistency of the numerical results and comparative analysis.
All authors have read and agreed to the published version of the manuscript.
Conflict of Interest Statement
The authors declare no conflicts of interest.
Funding Declaration
This research received no external funding.
Data Availability Statement
This study is based on numerical simulations generated using standard scientific computing tools (Python libraries: NumPy, SciPy, Matplotlib).
The simulation code and generated datasets can be made available by the corresponding author upon reasonable request.
Ethical Declarations
This study does not involve human participants or animals. Therefore, ethical approval was not required.
Acknowledgments
The authors sincerely thank the reviewers and experts for their valuable comments and constructive feedback, which significantly contributed to improving the quality, clarity, and robustness of this work.
Declaration of Generative AI in Scholarly Writing
During the preparation of this manuscript, the authors used generative AI tools to assist with language refinement, clarity improvement, and structuring of certain sections of the text.
All scientific content, including the model design, mathematical derivations, simulations, and conclusions, were fully developed and validated by the authors. The authors take full responsibility for the content of this publication.
Abbreviations
The following abbreviations are used in this manuscript:
ADAS – Advanced Driver Assistance Systems
ACC – Adaptive Cruise Control
MPC – Model Predictive Control
