A Review of Coupling Simulator for Vehicular Ad-hoc Networks

Author: Ramesh C. Poonia, Deepshikha Bhargava
Journal: International Journal of Information Technology and Computer Science(IJITCS) @ijitcs
Article in issue: 5 Vol. 8, 2016.
Free access
In recent years, continuous progress in wireless communication has opened a new research field in computer networks. Now a day's wireless ad-hoc networking is an emerging research technology that needs attention of the industry people and the academicians. A vehicular ad-hoc network uses vehicles as mobile nodes to create mobility in a network. Simulation is the reproduction of the method of real-world practices. The computer simulation runs on a single or a network of computers to model and reproduce the behaviour of a system. This is based upon the conceptual model to simulate the system. In this research paper, we will discuss the coupling simulator VanetMobiSim and NS2 for vehicular ad-hoc networks. This output will be useful in implementing efficient tools on the realistic highway scenario, especially for four-wheeler traffic types in VANETs.
VANETs, NS-2, CanuMobiSim, VanetMobiSim, TCL, AWK
Short address: https://sciup.org/15012485
IDR: 15012485
Text of the scientific article A Review of Coupling Simulator for Vehicular Ad-hoc Networks
Published Online May 2016 in MECS
A simulation of a system is the method of a modelling a system. However, this model can further be reconfigured and experimented, but sometime it becomes impracticable and very expensive [1] if implemented in the system itself. It is possible to study the process of the model to enhance properties pertaining to the behaviour of the actual system or its subsystem which can further be inferred. For instance, we may focus on the performance and the validity of the network and present the result before applying these features on the real system. In addition, network technologies reduce the time and the cost as compared to the natural system.
Besides providing safety and life-saving applications, vehicular networks have been an important source of powerful communication tools for their users. The safety of the commuters corresponds to the road traffic conditions with a survey estimating about 1.2 million deaths worldwide due to accidents. The same reason and the need to reduce the impact of transportation on roads have led many automotive industries and governments to invest in resources for the enhancement of safety measures and traffic efficiency. Due to this the application of communication and information technology has opened a new range of possibilities with vehicular ad-hoc networks being the most promising and needful field of the research. The network thus obtained is a self-configuring network including a collection of vehicles and elements on roadside infrastructure interconnected without any underlying infrastructures to send and receive informational warning regarding current traffic situation (see figure 1).
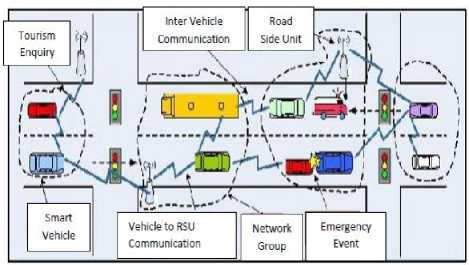
Fig.1. Vehicular Communication Scenario
VANET is an ad-hoc network in which communicating nodes are vehicles. It is viably a subset of MANET with very high node mobility and constraints of road and traffic. The most essential system innovation accessible these days for building up VANETs is the IEEE 802.11b (Wi-Fi) standard, however new models as IEEE 802.11p or IEEE 802.16 (Wi-Max) are promising.
The advantage of utilizing ad-hoc systems is that it is conceivable to convey these systems in territories where it isn't possible to introduce the required foundation. It would be costly and improbable to introduce 802.11 access points to cover whole transmission area. Another advantage of ad-hoc systems is that they can be fastly deployed without any formal administrative process. The organization of a vast scale vehicular system would be a troublesome undertaking. The handling of large VANET is a cumbersome task. These reasons add to the ad-hoc systems being connected to vehicular situations and the ad-hoc networks are more suitable for vehicular environment.
Vehicular ad-hoc systems are also termed as for example, inter-vehicle communication (IVC), Dedicated Short Range Communication (DSRC) or WAVE. The objective of a large portion of these ventures is to make new system calculations or adjust the current for utilization in a vehicular situation. Later on, vehicular ad-hoc systems will help the drivers and help to make more secure streets by decreasing car accidents.
-
II. Related Work
Several projects in Europe as mentioned in [2] are under research since 2000 and being supported by research universities, private organizations, automobile manufacturers and govt. agencies etc. These automobile organizations also proposed the same objective to make a communication platform for communication between vehicle to vehicle. The primary purpose of the researches towards this direction is to develop a system which may assist the drivers in a co-operative manner and to develop an ad-hoc network technology which can manage itself through radio network as communication medium with the objective of establishing a standard for future.
The “Car-to-Car Communication Consortium” (“C2C-CC”), [3] is an industry corporation, proposed by
European auto manufacturers. They works-out for generation and establishment of a broad European industry standard for car to car and car to infrastructure communication depends upon “WLAN” components and to guarantee European wide inter vehicle operability. Its specifications and contributions to the standardized organizations, including ETSI, TC, ITS in order to establish single European standards for ITS [4].
In the successive years of “Fleetnet- Internet on the Road” project the “Network on Wheels” “NoW” [5] was initiated and under the research in Germany. It is working primarily on communication condition of vehicle to roadside and vehicle to vehicle communication which was based on “WLAN” technology. The primary objective of the “NoW” project is to develop a system for communication in which integration of both safety (“Extended Electronic Brake Light”) and non safety application (“Car to Home” Application) may possible.
Simulation becomes the tool of choice to evaluate the simulation for quality solutions. In VANETs the simulation depends on the mobility model, which represents the flow diagram of mobile users, including its location, speed and acceleration over time. A mobility model should be a realistic mobility model that takes into account the characteristics of real-world region [6]. The realistic mobility can be achieved by two different ways:
-
a. A real world map obtained from TIGER (Topologically Integrated Geographic Encoding and Referencing) database from the U.S. Census Bureau [7], Clustered Voronoi Graph [8] and Shapefile Map [9].
-
b. A real world map organizes satellite images from google earth for realistic simulation of the networks [10].
The paper [6] describes the generation of an urban vehicle trace of the large-scale mobility. The data set is obtained by considering the realistic road topology, the microscopic and macroscopic mobility flows. A comparison with traces employed showed that incomplete representations of mobility can lead to significantly different network topologies, may seek performance evaluation protocols and architectures. Their mobility traces of vehicles are available at [11]. However, the author’s notes that they are still far from complete realism.
Haerri et. al. [8], generated a realistic vehicular movement traces for telecommunication networks simulators. They provide the description of VanetMobiSim mobility, which was validated by comparing its traces with TSIS-CORSIM. It is a traffic generator industry benchmark.
VanetMobiSim is one of the few vehicles oriented mobility simulator fully validated and freely available to the research community on vehicular networks. Paper [12] presents VanetMobiSim, an extension of Canu-MobiSim capable of producing realistic mobility traces of vehicles for several network simulators. VanetMobiSim-1.0 extensions made by both the macro and micro mobility were also demonstrated by the authors.
NS 2 is a network simulator tool. It is developed at UC Berkeley as a part of the VINT project. It is suitable for designing new protocols, comparing different protocols and traffic evaluations. NS-2 simulators are open source software and are easily available, compatible with Linux, Solaris, Windows and Mac OS X [20].
-
III. Classification of Simulator
The Vehicular Ad-hoc Networks (VANETs) is the distinctive structure. In this networks vehicles are equipped with the devices that device is generated a short-range communication on mobility based. However, the realistic simulation for VANETs is a challenging task because that network has high mobility of vehicles, for this problem VANETs research have the requirement of group of simulators to analyse the traffic and networks. The purpose of using these simulators is to achieve the simulations results more precise and accurate as a real time system. For the prevailing feedback following two simulators can be used:
-
• Traffic Simulator (used for mobility model)
-
• Network Simulator (used for network simulation)
-
A. Traffic Simulator
Traffic simulation is the mathematical modelling transportation systems like freeway junctions, major routes, roundabouts, downtown grid systems etc. It helps the application software in better planning, designing and operating upon the real life transportation systems. From microscopic, macroscopic and sometimes mesoscopic perspectives, Traffic simulation models can be highly useful.
There are many traffic simulators available for the research work such as CanuMobiSim, VanetMobiSim, SUMO/MOVE, TraNs, NCTUns. Among these VanetMobiSim is widely acclaimed model due to its supports to mobility at macro and micro level. VanetMobiSim is an extension for the CanuMobiSim, a flexible design for traffic simulation.
-
i. CanuMobiSim
CANU (Communication in Ad-hoc Networks for Ubiquitous Computing) [13] mobility simulator is a javabased application with a graphical user interface (GUI). The CanuMobiSim project began in Germany at the University of Stuttgart. This tool is capable to generate many mobility models like smooth mobility model, pedestrian, graph walk, fluid traffic, activity based mobility models to name a few. The patterns drawn by CanuMobiSim are derived from Markov Graph and are not self generated. On the other hand, CanuMobiSim is limited to the ability of generating the random graphs. It does not consider the obstacles in the simulation of wireless networks.
-
ii. VanetMobiSim
VanetMobiSim (Vehicular Ad-hoc Network Mobility Simulator) [14] is an extension to CanuMobiSim. As mentioned in previous section, CanuMobiSim has limitation in producing high level details in some specific scenarios. Hence, for the purpose of attaining high level realism VanetMobiSim was developed as a descendant of CanuMobiSim.
The Modelling of VanetMobiSim pertain the capability to build relationship between vehicle-to-vehicle and vehilce-to-road side unit. Thus, with the support of human mobility dynamics, it provides special features as the stop signs, traffic lights and activity based macromobility. It is also capable to derive road topologies from TIGER, GDF, random and custom topologies. This modelling technique is based upon three basic algorithms: Dijkstra’s Algorithm, Road-Speed Shortest Algorithm and Density Speed Shortest Algorithm. The algorithms can be implemented to generate the assumption or activity based trips and is capable to configure the path between two destinations. VanetMobiSim tool have different topologies like GDF and TIGER [15-16].
The framework used in VanetMobiSim uses a variety of mobility based on the concept of pluggable modules which is easily extensible. VanetMobiSim offers sufficient potential and features to create real-life scenarios. Besides that, simulation scenarios for VanetMobiSim are defined in XML format using tags, making scenario configuration easier and in a more handy way. Definitely, VanetMobiSim is quite more appropriate in order to generate scenarios for VANETs than other MANETs mobility pattern generators such as CityMob [17] and Bonnmotion [18].
-
iii. Process to install VanetMobiSim-1.1
The first step is downloading the source code of VanetMobiSim-1.1and expand it in a base directory of our choice.
The above command unzips the source code of VanetMobiSim-1.1 downloaded to download folder to a directory called VanetMobiSim in our personal directory. The following subdirectories and files will be created after its extraction:
READ_ME
In the next step we must download the source code of CanuMobiSim version 1.3.4 and expand it in the same directory.
#unzip~/home/rcpoonia/reseach/CanuMobiSim_1_3_4_sr c.zip –d ~/VanetMobiSim
We should get a subdirectory named /src so that at this time, our current directory should contains:
/jar
READ_ME
-
iv. Steps to install JDK and Apache Ant
At this stage, VanetMobiSim requires the Sun JVM, a virtual machine capable of executing Java bytecode, as well as Apache Ant, a tool whose mission is to build Java applications.
Following command will install the open-source Java Development Kit (JDK) v.6:
-
# sudo apt-get install openjdk-6-source
For installing Apache Ant version 1.7, we have to type the below given command:
-
# sudo apt-get install ant1.7
The next step is to change directory to VanetMobiSim directory and launch ant:
-
# cd ~/VanetMobiSim
-
# ant patch
Ant will patch the /src directory with VanetMobiSim source files.
After that we must type the following command in order to build the simulator and create the javadocs:
-
# ant all
The message appeared in the terminal after building the binary .jar file of VanetMobiSim will be place in the /jar subdirectory. Now VanetMobiSim is available for the use.
-
B. Network Simulator
Network simulation is a method to represent the behaviour of a network for observation of networks or calculating the communication between the different network components like end system, hops, routers, Intermediate links or access point, protocols and traffic etc.
The Network Simulator 2 means NS-2 is a distinct event network simulator aimed at network discovery. NS offers a packet level simulation using a lot of protocols, supporting quite a lot of transport protocols, numerous forms of multicast, wired networking, a number of ad-hoc routing protocols and propagation models, data broadcasting, satellite to name a few [19]. It also has the opportunity of using mobile nodes. The simulation file or a mobility trace file can be used to specify the mobility of these nodes. In this research work, the trace file is generated by VanetMobiSim [20]. Network Simulator as an alternate of the REAL network simulator in 1989 and has evolved substantially over the past few years.
In 1995 Network Simulator development was supported by DARPA through the VINT [21], a collaborative project at LBNL (Lawrence Berkeley National Laboratory), Xerox PARC (Xerox Palo Alto Research Center), UCB (University of California, Berkeley), and USC/ISINS (University of Southern California’s Information Sciences Institute).
Network Simulator was programmed using the C++ and provides a simulation interface through OTcl, It has an object-oriented dialect of Tcl (Tool Command Language). The user describes a network topology by writing OTcl scripts, and then the main Network Simulator program simulates that topology with specified parameters.
“NS-2” is a widely used simulator for networking due to its nature of open source, freely available, modifiable source code according to user needs (C++ and OTcl). It contain many in built routing protocols with packet level simulation and other functionality in the form of transport protocols, different types of multicasting, sensor network support, propagation models [25], satellite and data broadcasting. It also supports other traffic scenario generators such as web, telnet, CBR etc. to use them in the simulation. “NS-2” uses the mobile nodes for “VANET” and “MANET” networks. The node movement pattern can be either coded in the tcl file itself or by generating a trace file which may be used as command line argument with tcl file. In the simulation, a trace file has been generated by ns-2. There are other considerable features that are “NAM” (“Network Animator”) and “TraceGraph” tools which are available as add-ons.
Moreover, NS2 is easily extensible since the simulation kernel source code is available, which implements new routing protocols; propagation models etc, and use them in simulations.
-
i. Process to install NS 2.34
NS 2.34 simulator in FEDORA- 13 can be installed using following steps:
STEP 1
-
• Before starting NS-2 installation, logged on as an administrator.
-
• To ensure administrative mode type user name as “su”.
-
• Click “Terminal” to open the terminal window.
-
• Type the below command.
yum install autoconf automake gcc-c++ libX11
STEP 2
-
• After step 1, we can download the “ns-allinone-2.34.tar.gz” and copy in root directory.
-
• To check we are in root directory or not with the help of “pwd” command.
-
• After the copy of ns-allinone-2.34.tar.gz package unzip this “tar” file to the same folder and type below command:
-
• Then get the ns-allinone-2.34 folder. Now type:
#cd ns-allinone-2.34
-
• After that type:
#./install
-
• The message will be displayed that ns-2 has been installed.
STEP 3
-
• Make sure that where our NS-2 is installed from the step#2, start setting BASH file, if the installation process has finished, we must edit our path. Type the below command
#gedit ~/.bashrc
-
• Now add the following lines at the end of the file and save it in the directory /home/rcpoonia where we have extracted the NS2 files.
#LD_LIBRARY_PATH
OTCL_LIB=/home/rcpoonia/na-allinone-2.34/otcl-1.13
NS2_LIB=/home/rcpoonia/na-allinone-2.34/lib
X11_LIB=/usr/X11R6/lib
USR_LOCAL_LIB=/usr/local/lib
GCC=/usr/bin
Export
LD_LIBRARY_PATH=SLD_LIBRARY_PATH:SOTCL _LIB:$ X11_L$USR_LOCAL_LIB:$GCC
#TCL_LIBRARY
TCL_LIB=/home/rcpoonia/ns- allinone2.34/bin:/home/route/ns- allinone2.34/tcl8.4.18/unix:/home/rcpoonia/na-allinone-
2.34/tcl8.4.18/unix
NS=/home/rcpoonia/ns-allinone-2.34/NS2.34/
NAM=/home/rcpoonia/ns-allinone-2.34/nam-1.14/ PATH=$PATH:$XGRAPH:$NS:$NAM
-
• Finally type the following command:
#source~/.bashrc
-
• Now we have to validate ns2
#cd~/ns-allinone-2.34/NS2.34
#./validate
-
• Now the NS-2 installation process is ended. We can see the confirmation of Network Simulator - 2 installations and cross check with the help of command “ns”. If we find on the prompt “%” sign that means NS-2 is installed successfully.
-
• After this we can check network animator with typing the command “nam”. If we find nam window that means animator has been installed successfully.
STEP 4
-
• We have xgraph in the ns-2 package, which is xgraph-12.1, It can be installed using following command.
#CD xgraph-12.1
#make install
-
• Now our xgraph is also successfully installed.
-
• To confirm installation of xgraph run a program using below command.
#xgraph
-
• Finally NS2 is available for its use.
-
ii. How to install AWK
-
• For installing AWK, then must type the following command:
#sudo apt-get install gawk
-
• Now awk is available for its use.
-
IV. Languages and Files Used
The following languages and files have been used in the simulation process of this research work:
-
A. XML and Trace File
According to the research methodology, simulators are different at the microscopic level and this is main criteria for selecting a vehicular mobility simulation. The input to VanetMobiSim is an XML configuration file.
A realistic vehicular movement pattern, it is necessary to define in xml file the attributes like velocity of the vehicles, traffic light, number of lanes, trip motion, and road topology etc.
After defining a mobility scenario in an xml file, launching the VanetMobiSim framework is necessary in order to produce a node mobility trace file in ns-2 format. The output of xml file at simulation time is 59.586 seconds and trace file.
-
B. TCL Language
TCL [22] is Tool Command Language developed by Dr. John Ousterhout at the University of California, Berkeley. The tcl file have the scripting of networking scenarios like x and y axis, time of simulation, size of packet, type of antenna, protocols, models, other various parameters and their settings of generated traffics regarding mobility [23], reliability and other constraints. Initializing the on-demand routing protocol within a TCL file as inputs in association of particular traffic and movement files, the NS-2 simulates accordingly. Finally it generates two files as a result i.e. Trace files (*.tr) as the outputs and Network Animator File (*.nam).
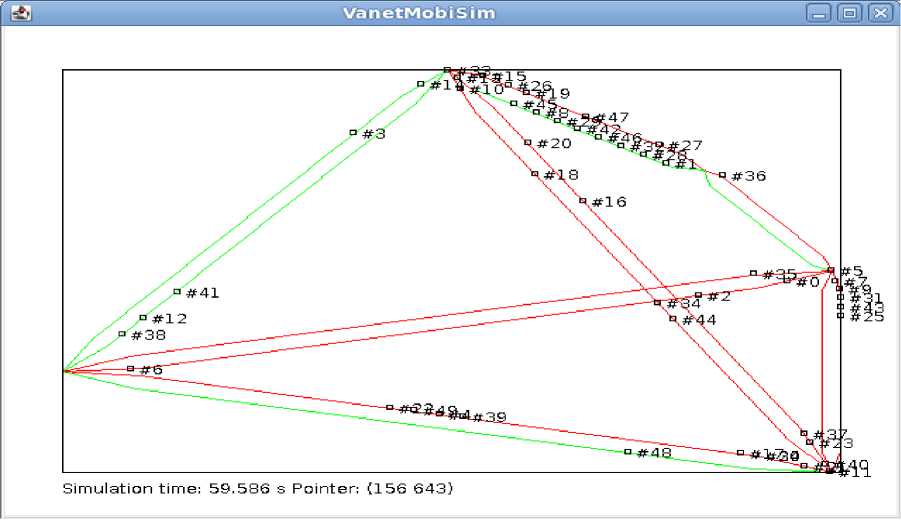
Fig.2. XML file output through VanetMobiSim
-
C. AWK Language
AWK is a pattern-matching language developed by Alfred Aho, Brian Kernighan, and Peter Weinberger in 1977. Its utility is a data extraction and reporting tool that uses a data-driven scripting language for the purpose of producing formatted reports. In other words, AWK is an excellent filter and files of text processor. A file is treated as a sequence of records and by default each line is a record.
Each line is broken up into a sequence of fields, so we can think of the first word in a line as the first field, the second word as the second field and so on. AWK reads the input a line at a time.
Then a line is scanned for each pattern in the program and for each pattern that matches, the associated action is executed [24].
AWK is easier to use than most conventional programming languages. It can be considered to be a pseudo C interpreter, as it understands the same arithmetic operators as C. AWK also has string manipulation functions, so it can search for particular strings and modify the output.
awk [options] -f source-file
-
D. Trace and NAM File
NS-2 generates a trace file that has all information of the packets like and generated in the text. In this text file we can see the whole information regarding network traffic like packet, size, coordinates, protocols etc. and that all the information have in columns format like figure 3.
s -t 1.835637580 -Нз 2 -Hd -2 -Ni 2 -Nx 225.05 -Ny 334.95 -Nz 0.00 -Ne -1.000000 -Nl RTR -Nw----Ma 0 -Md 0 -Ms 0 -Mt 0 -Is 2.255 -Id -1.255 -It AODV -Il 48 -If 0 -11 0 -Iv 30 -P aodv -Pt 0x2 -Ph 1 -Pb 2 -Pd 9 -Pds 0 -Ps 2 -Pss 6 -Pc REQUEST r -t 1.836585583 -Hs 0 -Hd -2 -Ni 0 -Nx 224.43 -Ny 334.08 -Nz 0.00 -Ne -1.000000 -Nl RTR -Nw----Ma 0 -Md ffffffff -Ms 2 -Mt 800 -Is 2.255 -Id -1.255 -It AODV -Il 48 -If 0 -li 0 -Iv 30 -P aodv -Pt 0x2 -Ph 1 -Pb 2 -Pd 9 -Pds 0 -Ps 2 -Pss 6 -Pc REQUEST
-
Fig.3. Trace File of AODV
The nam files have all coordinates that represent position and graphical information with defined parameters as per time of simulation.
In NS-2, open the nam visualizer and after this open the trace file and execute through file menu or nam command. The output example of this file is shown in figure 4.
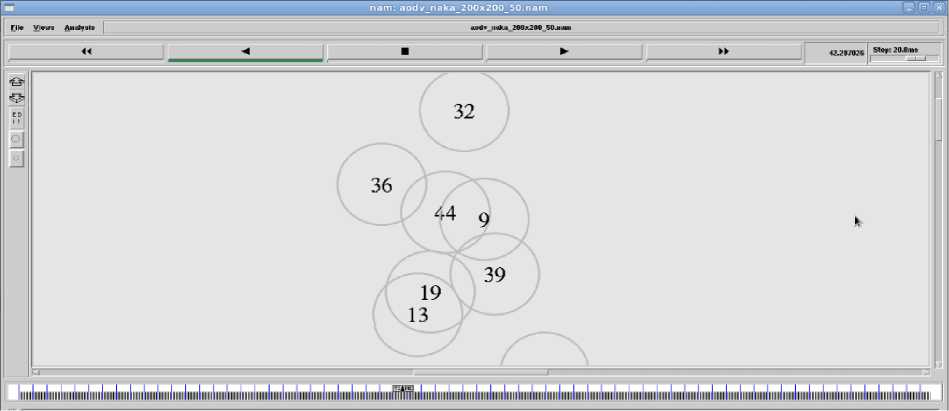
Fig.4. NAM file output
V. Conclusions
The VanetMobiSim and NS-2 are coupling simulators for generate the realistic simulations. We can integrate the traffic and network scenarios in this coupling simulator. This research paper helps us understand the relationship between ns-2 and vanentmobisim, the installation process of these tools and required languages, some steps are necessary for vehicular simulation.
References A Review of Coupling Simulator for Vehicular Ad-hoc Networks
- K. Preston White, Jr., Ricki G. Ingalls, “Introduction to Simulation”, Proceedings of the 2009 Winter Simulation Conference, IEEE, 2009.
- The European Project “CarTalk2000”, Available: http://www.cartalk2000.net/.
- C2C-CC: CAR 2 CAR Communication Consortium, Available: http://www.car-to-car.org/.
- Intelligent Transportation System. Internet: http://www.its.dot.gov/research/v2i.htm [10 April 2011].
- Network-on-Wheels, Available: www.network-on-wheels.de.
- Sandesh Uppoor, (2011) “Large-scale Urban Vehicular Mobility for Networking Research”, Accepted for publication at IEEE VNC.
- U.S. Census Bureau - Topologically Integrated Geographic Encoding and Referencing (TIGER) system, http://www.census.gov/geo/www/tiger
- Jerome Harri, Marco Fiore, Fethi Filali, and Christian Bonnet, (2007) “DEMO: Simulating Realistic Mobility Patterns for Vehicular Networks with VanetMobiSim”, 1st IEEE International Symposium on Wireless Vehicular Communications, 30th September-1st October 2007, Baltimore, USA.
- Available At: http://lca.epfl.ch/projects/trans/.
- Nidhi & Lobiyal, D.K., (2012) “Performance Evaluation of VANET using realistic Vehicular Mobility”, N. Meghanathan et al. (Eds.), VOL. 84, CCSIT, Part I, LNICST 84, pp. (s) 477–489.
- TAPASCologne Project, http://sourceforge.net/apps/mediawiki/sumo/index.php?title=TAPASCologne.
- F. J. Martinez, J. C. Cano, C. T. Calafate, and P. Manzoni, (2008) “Citymob: A Mobility Model Pattern Generator for VANETs”, in IEEE Vehicular Networks and Applications Workshop (Vehi- Mobi, held with ICC), Beijing, China.
- CANU Project Home Page. Available: http://canu.informatik.uni-stuttgart.de
- VanetMobiSim-1.1, Available: http://vanet.eurecom.fr/
- CANU Research Group (Stuttgart University) Available: http://www.canu.informatik.uni-stuttgart.de/mobisim/
- TIGER map, Available: http://www.census.gov/geo/www/tiger/
- CityMob, Available: http://www.grc.upv.es/Software/citymob.html
- Bonnmotion: Mobility Scenario Generator (Bonn University), Available: http://www.net.cs.uni-bonn.de/wg/cs/applications/bonnmotion/
- NS2, DARPA Project, Available: http://nsnam.isi.edu/nsnam/index.php/User_Information
- Ramesh C. Poonia, Deepshikha Bhargava, and B. Suresh Kumar, "CDRA: Cluster-based dynamic routing approach as a development of the AODV in vehicular ad-hoc networks", Signal Processing and Communication Engineering Systems (SPACES), 2015 International Conference on. IEEE, 2015.
- VINT (Virtual InterNetwork Testbed) Project, Available: http://www.isi.edu/nsnam/vint/
- Tool Command Language, Available: http://c2.com/cgi/wiki?ToolCommandLanguage
- Gupta, Anuj K., Harsh Sadawarti, and Anil K. Verma. "Performance analysis of MANET routing protocols in different mobility models", International Journal of Information Technology and Computer Science (IJITCS), Vol. 5, No. 6, May 2013.
- AWK, Available: http://www.staff.science.uu.nl/~oostr102/docs/nawk/nawk_toc.html
- Francisco J. Martinez, Chai-Keong Toh, Juan-Carlos Cano, Carlos T. Calafate, Pietro Manzoni, “Realistic Radio Propagation Models (RPMs) for VANET Simulations”, Wireless Communications and Networking Conference, IEEE, April 2009.
