About torsion of parallelepiped around three axis

Author: Senashov S.I., Savostyanova I.L., Filyushina E.V.
Journal: Сибирский аэрокосмический журнал @vestnik-sibsau
Section: Математика, механика, информатика
Article in issue: 3 т.18, 2017.
Free access
The theory of limit state deals with statically determinate condition of solids. In this case the system is closed due to extreme conditions, such properties of matter such as viscosity, elasticity, etc. cannot influence the limit state. In other words, when reaching the limit state the nature of the relationship between stress and strain has no effect on the ulti- mate state. The study of such systems has been consistently pursued by D. D. Ivlev and his coauthors. To the equilib- rium equations they attached two or an equation relating the components of the stress tensor. This led to the closure of the system of equilibrium equations. In the theory of plasticity equations, which are closed with a single yield stress are studied well. The most well-known system describing the ultimate state of deformable bodies are well-studied equations describing the torsion of the plastic bodies, the two-dimensional stationary problem of the theory of plasticity. The arti- cle discusses some other systems of equations which are closed only by one equation of flow, which corresponds to the classical theory of plasticity. It is assumed that the components of the velocity vector depend only on two spatial coor- dinates. In addition, for the component of velocity vector conditions of deformations compatibility are performed identi- cally. The constructed systems can be used to describe the twisting of the parallelepiped around the three orthogonal axes. For the constructed system of equations point group symmetries, conservation laws have been found. It is shown that the system allows 8 -dimensional Lie algebra. On the basis of the symmetry group some classes of invariant solutions of rank 1 have been constructed. They depend on arbitrary functions of one variable. It is shown that these solutions can be used to describe plastic torsion of a parallelepiped around three orthogonal axes. It is shown that the system admits infinite series of conservation laws. The concluding paragraph describes the construction of elastic solutions to the problem. It is shown that it boils down to finding three harmonic functions.
Plasticity theory, limit state, exact solutions
Short address: https://sciup.org/148177732
IDR: 148177732 | UDC: 539.374
О кручении параллелепипеда вокруг трех осей
Теория предельного состояния имеет дело со статически определимым состоянием твердых тел. В этом случае система замкнута за счет предельных условий, и такие свойства материи, как вязкость, упругость и т. п., на предельное состояние влиять не могут. Другими словами, при достижении предельного состояния характер связи между напряжениями и деформациями не оказывает влияния на предельное состояние. Исследование таких систем последовательно проводил Д. Д. Ивлева и его соавторы. К уравнениям равновесия они присоеди- няли два или уравнения, связывающие компоненты тензора напряжений. Это приводило к замкнутости сис- темы уравнений равновесия. В теории пластичности хорошо изучены уравнения, которые замыкаются одним пределом текучести. К наиболее известным системам, описывающим предельное состояние деформируемых тел, относятся хорошо исследованные уравнения, описывающие кручение пластических тел, двумерные задачи стационарной теории пластичности. Рассмотрены некоторые другие системы уравнений, которые замыкаются только одним уравнениям текучести, что соответствует классической теории пластичности. Предпола- гается, что компоненты вектора скоростей зависят только от двух пространственных координат. При этом для компонент вектора скорости деформаций выполняются тождественно условия совместности деформаций. Построенные системы могут быть использованы для описания кручения параллелепипеда вокруг трех ортогональных осей. Для построенной системы уравнений найдены точечные группы симметрий, законы сохранения. Показано, что система допускает восьмимерную алгебру Ли. На основе группы симметрий построены некоторые классы инвариантных решений ранга 1. Они зависят от произвольных функций одной переменной. Показано, что эти решения можно использовать для описания пластического кручения парал- лелепипеда вокруг трех ортогональных осей. Показано, что система допускает бесконечную серию законов сохранения. Описано построение упругого решения поставленной задачи. Показано, что оно сводится к нахо- ждению трех гармонических функций.
Text of the scientific article About torsion of parallelepiped around three axis
Introduction. Some tasks of the deformable solid body mechanics are studied rather well. These are so-called statically definable tasks. These tasks deal with torsion of prismatic bars and with plane strain state. They belong to the wide range of tasks – limit state of deformable bodies. The theory of the limit state is one of the fundamental sections of the deformable solid body mechanics [1]. The theory of the limit state deals with statically definable state of solid bodies. In this case the system is closed at the expense of limit conditions and such properties of matter as viscosity, elasticity, etc. cannot influence the limit state. In other words once the limit state has been achieved, the nature of relation between stress and strain does not influence the limit state. Some of such systems are considered in [1–3].
In the first part one system of plasticity equations which describes the limit state is considered. This system can be used for the description of plastic current around three orthogonal axes.
Problem setting. Suppose x = x1, y = x2, z = x3 – orthogonal axes, u, v, w – components of velocity deformation vector, eij – components of velocity deformation tensor, σij – components of stress tensor. Components of stress tensor conforms with the equilibrium equations do ij= о. (1)
On the repeating indexes summing is supposed. Deviator of stress tensor and deformation velocity tensor are coaxial
V iJ -S ij P = ^ e ij , (2)
where δ i j – Kronecker delta; λ – unspecified nonnegative function, 3 p = σ i j .
Equation system (1)–(2) closes by Mises yield condition
( ° 11 - p ) 2 - 1 °” - p ) 2 + ( o 33 - p ) 2 +
+ 2 (°12 + °13 + °23 ) = 2kS .
It is known [1] that in case of prismatic bar torsion around oz axis, the field of deformation velocities is as folows u = –yz, v = xz, w = w(x,y).(4)
Generalizing ratios (1) we will demand u = u(y,z), v = v(x,z), w = w(x,y).(5)
We will construct the system of equations corresponding to the field of deformation velocities. As a result we receive the following system which will be researched in the study presented
5yt1 +5zt2 =dxp, 5xt1 +5zt3 =dyp, d x T2 + d y T3 = d zp , (T1 )2 + (T2 )2 + (T3 )2 = ks-
The system of equations (6) can be used, in particular, for the description of rectangular parallelogram in the plastic state torsion around three axes (see a figure.).
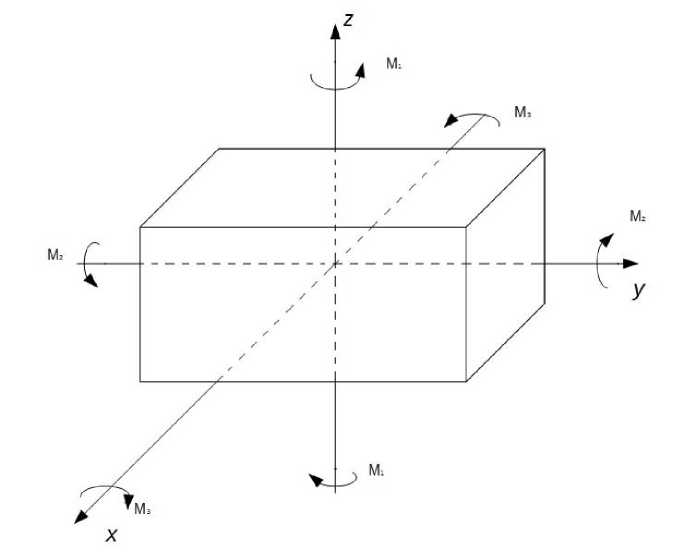
The torsion of parallelepiped around the three axes
Кручение параллелепипеда вокруг трех осей
We will assume that the parallelogram twists around axes of o x , o y , o z in equal and opposite pairs of forces with the moments M 1 , M 2 , M 3 . At the same time there are some limit moments M 1 , M 2 , M 3 when the parallelepiped passes into the plastic state and begins to twist. From the system (6) it is visible that such task is statically definable and can serve for limit moment values finding via formulas
M * = Л ( У т 2 - z т 1 ) dydz ,
M * = H ( z т1 — x т 3 ) dxdz , (7)
M 3 = If ( x т 3 — У т 2 ) dydz .
Except the moments (7) the body is affected by hydrostatic pressure
Pl ^ = P 0 ,
∑ – lateral surface of a parallelepiped.
We will now study some properties of the system (7).
1. Characteristic surfaces of system (6).
The system (6) contains the finite ratio, connecting values т1, т2, т3. After having differentiated it on x, y, z we receive the system d y т1 + д z т2 = д xP, д x т1 + д z т3 = д yP, д x т2 + д y т3 = д zP, т15хт1 + т*5,т2 + т3д,,т3 = 0, (8)
xxx т13 y т1 + т2д y т2 + т35 y т3 = 0, т1д z т1 + т2д z т2 + т3д z т3 = 0.
Let’s represent the equation of the characteristic surface of the equation system (9) as
V = v ( x , y , z ) , (9)
Characteristic surfaces of the system (8) are found from the determinant a x V d y V d y V d x V d z V 0
0 т 1
|
a z v |
0 |
||
|
0 |
a z v |
||
|
a x V |
a y V |
= 0. |
(10) |
|
т 2 |
т 3 |
Note . It is easy to see that all three latter equations of the system (8) give identical lines in the determinant (10).
Expending the determinant (10) on the last line we receive т1аzV ((dzv)2 - (axv)2 - (dyv)2 ) +
+ т 2 а y v ( ( a y v ) 2 - ( a x v ) 2 - ( a z v ) 2 ) +
+ т 3 а x v ( ( a x v ) 2 - ( a y v ) 2 - ( a z v ) 2 ) = 0.
This equation can be written as т1 n3 (2n2 - 1) + т2n2 (2n2 - 1) + т3п (2n2 -1) = 0, (11)
, d v d yV dzV where n1 = . , n 2 = -=^^=, n 3 = . .
V ( Vv ) 2 V(vv ) 2 V(vv ) 2
One of solutions of the equation (11) which does not depend on values т 1 , т 2 , т 3 is
2 n i = 1, i = 1, 2, 3.
Therefore, an angle between the normal to a character-ristic surface v ( x , y , z ) = 0 and vector n equals ±^ 4. Set of elements of the characteristic surface forms the solution cone ± ^ around the direction which is defined by the third root of the equation (11) and depends on tension.
Point symmetries of the equation system (6). Point symmetries are widely used in the studies of differential equations. Necessary data on symmetries and their application to the equations of plasticity and elastic plasticity can be found in [4–8]. Since the system (6) contains finite ratio, we should work with its consequences, which looks like (9), where for convenience the following designations are entered axт1 = qL axт2 = q12, axт3 = q3, axP = q4 etc., q 2+ q 2 = q4, q1+ q 3 = q4, q2+q 2 = q 4, т q1 + т q1 + т q1 = 0, т1 q 2 + т2 q 2 + т3 q 2 = 0, (12)
т 1 q 3 +т 2 q 2 +т 3 q 3 = 0, 1222322
( т ) + ( т ) + ( т ) = k s .
We will search for point symmetries relative to which the diversity determined by the system of equations (12) is invariant.
According to Lie-Ovsyannikov’s technique, we will search for the admissible operator of point symmetry in view of
X = ^ j ^ + n i -d- , j = 1, 2, 3; i = 1, 2, 3, 4. (13) a x j ат i
We continue the operator (13) on the first derivatives by formulas
X = X + g k —, (14)
d qk where ?k = Dk (ni)-qD (C₽), Dk =^- + qk .
v 7 v 7 dxk дт
With the operator (14) we affect the system of equations (13) and transfer to the diversity set by this system. As a result we receive polynoms of the second level in relation to “internal” – endogenous variables qk2,qk3. “External” – exogenetic variables q1k, qk4 are determined from the system (12) via endogenous variables. In the received polynoms of the second level we equate coefficients to zero in case of the first and second levels of endogenous variables. It allows to receive the redefined system of linear differential equations with respect to coefficients qk2, qk3. Solving this system, obtained is the following result.
Theorem . The system of equations (6) allows Lie algebra L 8 , generated by operators
|
X. =— i д x i ’ |
X 4 = x i |
д д xi ’ |
X 5 |
=_д_ д р , |
|
X =x — X 12 = x 2 ~ д x 1 |
д - x-- д x 2 |
+ т 2 |
д дт 1 |
-т 1 —, дт 2 ’ |
|
X A X 13 = x 1 - д x 3 |
д - x 3 — д x 1 |
+ т1 |
д дт 3 |
-т дт 1 |
|
X -x A X 23 = x 3 д x 2 |
д - x 2 — д x 3 |
■ + т 3 |
д дт 2 |
-т 2 А дт 3 |
Availability of the operators X i , i = 1, 2, 3, 4 means that the system (6) allows shifts and stretching on axes x , y , z Xj = x i + a i , i = 1, 2, 3, x i = x i exp a 4 , shift for hydrostatical pressure p ' = p + a 5 , as well as rotation around three coordinate axes.
-
2. Invariant solutions of equation system (6).
-
2.1. Let’s create invariant solution relative to subalgebra generated by the operator
-
X з = —.
д z
This type of solution should be searched in the following view д z т rz = rд rP, r д r т r 0 + rд z т0z + 2т r 0 = 0, rд r т rz +т rz = д zP, (20)
222 2
т r 0 +т rz +т 0 z = kS .
In this case тrz is determined from the linear differential equation r5rтrz + r2d2тrz -тrz + r2d2тrz = 0.
Other functions are determined from the system (21).
-
3. Conservation laws of equation system (6).
Conservation laws are applied to solutions of elastic – plasticity equations. Necessary determination and examples conservation laws usability can be found in [9–15].
Let’s find conservation laws of equation system (6) in the following view axA (т1, т2, т3, p )+a yB (т1, т2, т3, p)+
+ д z C ( т 1 , т 2 , т 3 , P ) = 0.
The equate is done on the account of equation system (6). From this follow the ratio x12 a -т2а pb+т1а pc = 0, x13в - т3аpa+т1аPc = 0, x12в - т2аpa = 0, x12 c -т1а pa = 0,
X13 C + т1д pB = 0, X13 A -т3д pB = 0, т ‘ = т ‘ (x, У), P = P (x, У).
We add (15) in system (6) and we obtain д y T' = д xP, д x T' = д yP, д x т2 + д y T3 = 0,
( т ) + ( T ) + ( T ) = k S .
From (16) easily obtain т1 = f (x + y) + g (x - y), P = f (x + y)-g (x - y),
5 т 1 + дгт 2 = дх p . yz x
Now functions т2, т3 are determines from the equation systems дx т2 + д y т3 = 0, (т2 )2 + (т3 )2 = kS-(т1 )2. (18)
The equation system (18) describes the bar torsion in the conditions when the yield stress (limit of fluctuation) depends on variables x , y . These tasks are considered in [4] and in the literature quoted.
-
2.2. Let’s construct the invariant decision relative to subalgebra generated by the operator X 12. This operator 3
in cylindrical coordinate system r 0 z looks like X 12 = —.
In this case the system (6) will be written as follows
-
д 0 т r 0 + д z т rz = r д rP , r д r т r 0 + r д z т 0 z + 2 т r 0 = д 0 P ,
r д r т rz + д0т0z +т rz = д zP, тr0 +т rz +т0z = kS .
Invariant solution in this case is determined from the following system
where Xl2 = -т 2 д 1 + т 1 д 2, X ,3 = -т 3 д 1 + т 1 д 3 . 12 т т 13 т т
Let’s show that these equations are compatible. Suppose д рА = д рВ = д рС = 0, than - one of the solutions
will be the infinite series
A ( S ) , B ( S ) , C ( S ) ,
where S = ( т 1 ) 2 + ( т 2 ) 2 + ( т 3 ) 2 , A ( S ) , B ( S ) , C ( S ) -
random differentiable functions.
Remark . Are there other laws? Not stated, but according to the author other conservation laws do not exist.
-
4. It is clear, for the system (6) tension state is the most relevant. Supposing it is known. Than to find three components of the velocity vector we have three equations
т 1 =X e 12, т 2 =X e 13, т 3 =X e 23, (21)
where
2 e 12 = д y u + д x v , 2 e 13 = д z u + д x w , 2 e 23 =д z V + д y W.
Let’s show that the equations (21) can be solved
in terms of deformation velocity tensor components. It is known that except the equations (21) deformation velocity tensor components shall satisfy equations of compatibility as well. Owing to ratios (22) and (5) only six
of them remain.
д 2 y e 12 = 0, д 2 z e 13 = 0, д 2^ 23 = 0, д x ( д x e 23 -д z e 12 -д y e 13 ) = 0, д y ( д y e 13 -д z e 12 -д x e 23 ) = 0, д z ( д z e 12 -д y e 13 -д x e 23 ) = 0.
Theorem . The compatibility equations of deformation speeds are done identically.
In this case from (21) we have
12 22222
( т ) ( е 12 + е 13 + e 23 ) = kSe12 ,
22 22222
(т ) (e12 + e13 + e23 ) = kSe23,
32 22222
( T ) ( e 12 + e 13 + e 23 ) = kS e 13 .
Equation system (24) is a system of linear homogeneous equations relevant to variables e 122, e 123, e 223. Its determinant is
2 \2м2
12 11
T) kS (t )
( ’ 2 ) 2 T ) 2 - k S ( t 2 ) 2
T ) 2 ( T ) 2 : ) 2 - k 2
This determinant equals zero as the amount of all lines is equal to zero. It means that the system (24) has only two independent equations for three components of a deformation speed tensor. For example, value e 223 can be picked up randomly, thus for the given tension state, defined from the system (6), velocity field is defined with the functional arbitrariness.
-
5. In this part we will consider three-dimensional equations of elasticity in static. The system of equilibrium equations is described using equations (1), relation between components of stress tensor and deformation tensor is as follows
_ ( ^ 11 - v ( ^ 22 +^ 33 ) )
£11 = „
11 E
_ ( ^ 22 - v ( ^ 11 +^ 33 ) )
£ 22 =
_ ( ° 33 - v ( CT 22 '^ 11 ) )
£ 33 =
c _ °12 £12 “ , ,
2 ц
c _ °13 c _ °23 £ 13 “ , , £ 23 “ , ,
2ц 2ц where е? deformation tensor components, E, ц, v elastic constants.
Supposing vector deformation components are as follows w1 = w1 (У,z), w2 = w2 (x,z), w3 = w3 (x,z). (26)
Inserting (26) into (25) we obtain
^1^1
-
d, w +o, w, = 12 , d w, +o, w3 =--- , y 1 x 2 z 1 x 3
2 ц 2 ц
°23
5Z w , + d w = . z 2 y 3 2 ц
In this case equation (1) with regard to (26), (27) is as follows d yyw1 + d zzw1 = 0, d xxw2 + d zzw2 = 0, sxwi +d w3 = 0. xx yy
It is shown that components of deformation vector are harmonic functions. The solutions obtained here can be used for the description of elastic status of the parallelepiped twisted around three orthogonal axes. The moments are defined from formulas (7). As £11 + e22 +e33 = 0, dilatation (volume change) is equal to zero. The solution (27) describes vortex movement characterized by the vector ю
|
( -г 1 |
j |
k 1 |
|
|
ю = |
дх x |
d У |
d z |
|
I w 1 |
w 2 |
w 3 J |
Herewith movement paths will be vortex lines which are defined from the equation dx dy dz w1w2w3.
Conclusion. In the present work for the first time considered is the system which can be used for the analysis of stress state appearing under torsion of the parallelepiped around three orthogonal axes. At that it can be in either plastic or elastic state.
References About torsion of parallelepiped around three axis
- Предельное состояние деформированных тел и гонных пород/Д. Д. Ивлев . М.: Физматлит, 2008. 832 с.
- Ивлев Д. Д. Теория идеальной пластичности. М.: Наука, 1966. 232 с.
- Ишлинский А. Ю., Ивлев Д. Д. Математическая теория пластичности. М.: Физматлит, 2001. 701 с.
- Ольшак В., Рыхлевский Я., Урбановский В. Теория пластичности неоднородных тел. М.: Мир, 1964. 156 с.
- Ovsyannikov L. V. Group Analysis of Differential Equations. NewYork: Academic Press, 1982. 401 с.
- Senashov S. I., Yakchno A. N. Reproduction of solutions for bidimensional ideal plasticity//Journal of Non-Linear Mechanics. 2007. Vol. 42. P. 500-503.
- Senashov S. I., Yakchno A. N. Deformation of characteristic curves of the plane ideal plasticity equations by point symmetries//Nonlinear analysis. 2009. Vol. 71. P. 1274-1284.
- Senashov S. I., Cherepanova O. N. Новые классы решений уравнений минимальных поверхностей//Journal of Siberian Fed. Univ., Math. & Ph. 2010. № 3(2). С. 248-255.
- Senashov S. I Conservation Laws, Hodograph Transformation and Boundary Value Problems of Plane Plasticity//SIGMA. 2012. Vol. 8. P. 16.
- Senashov S. I., Yakchno A. N. Some symmetry group aspects of a perfect plane plasticity system//J. Phys. A: Math. Theor. 2013. T. 46, № 355202.
- Senashov S. I., Yakchno A. N. Conservation Laws of Three-Dimensional Perfect Plasticity Equations under von Mises Yield Criterion//Abstract and Applied Analysis. 2013, Article ID 702132. 8 p.
- Senashov S. I, Kondrin A. V., Cherepanova O. N. On Elastoplastic Torsion of a Rod with Multiply Connected Cross-Section//J. Siberian Federal Univ., Math. & Physics. 2015. № 7(1). P. 343-351.
- Senashov S. I., Cherepanova О. N., Коndrin А. V. Elastoplastic Bending of Beam//J. Siberian Federal Univ., Math. & Physics. 2014. № 7(2). P. 203-208.
- Senashov S. I., Filyushina E. V., Gomonova O. V. Сonstruction of elasto-plastic boundaries using conservation laws//Вестник СибГАУ. 2015. Т. 16, № 2. С. 343-360.
- Senashov S. I., Vinogradov A. M. Symmetries and Conservation Laws of 2-Dimensional Ideal Plasticity. Proc. of Edinb. Math. Soc. 1988. Vol. 31. P. 415-439.
