Accident Response Time Enhancement Using Drones: A Case Study in Najm for Insurance Services

Author: Salma M. Elhag, Ghadi H. Shaheen, Fatmah H. Alahmadi
Journal: International Journal of Information Technology and Computer Science @ijitcs
Article in issue: 6 Vol. 15, 2023.
Free access
One of the main reasons for mortality among people is traffic accidents. The percentage of traffic accidents in the world has increased to become the third in the expected causes of death in 2020. In Saudi Arabia, there are more than 460,000 car accidents every year. The number of car accidents in Saudi Arabia is rising, especially during busy periods such as Ramadan and the Hajj season. The Saudi Arabia’s government is making the required efforts to lower the nations of car accident rate. This paper suggests a business process improvement for car accident reports handled by Najm in accordance with the Saudi Vision 2030. According to drone success in many fields (e.g., entertainment, monitoring, and photography), the paper proposes using drones to respond to accident reports, which will help to expedite the process and minimize turnaround time. In addition, the drone provides quick accident response and recording scenes with accurate results. The Business Process Management (BPM) methodology is followed in this proposal. The model was validated by comparing before and after simulation results which shows a significant impact on performance about 40% regarding turnaround time. Therefore, using drones can enhance the process of accident response with Najm in Saudi Arabia.
Accident Response, Road Traffic, Turnaround Time, Process Automation, Drones, Bizagi
Short address: https://sciup.org/15018953
IDR: 15018953 | DOI: 10.5815/ijitcs.2023.06.01
Text of the scientific article Accident Response Time Enhancement Using Drones: A Case Study in Najm for Insurance Services
Traffic accidents were and still are one of the main causes of human death, as it was in the ninth place among the causes of death, but the percentage of traffic accidents in the world increased to become the third in the expected causes of death in 2020. This percentage increases every year. The World Health Organization (WHO) has assessed that the rate of road traffic injuries in the Eastern Mediterranean Region is the second highest in the world. There are many factors that are measured to find out the reasons for the increase in accidents. Among the factors that may be the health condition of the vehicle driver or the age and type of vehicle and even the design of the roads can increase or decrease the accident rates [1]. One of the factors causing the increase in vehicle accidents on the road is the increase in population numbers, which in turn increases the number of vehicle ownership [2].
Saudi Arabia’s growth rate is increasing, in 2022, it has increased by 1.28 percent versus the year before. The estimated population is 36,408.820 and is expected to reach 39.32 million in 2030 [3]. As a result of that car accidents have increased significantly as the population has grown and traffic on the roads has increased [4]. Every year, there are more than 460,000 car accidents in Saudi Arabia, especially during Ramadan and the Hajj season [5]. Car accidents can cause financial losses such as treatment or repair expenses. The loss may occur is not limited to individuals; it may affect governments as well. The expenses of traffic accidents amount to 1 % to 2 % of total national products [1]. Regardless of the damage to the parties involved in the accident, if the problem is not resolved quickly, it will cause other problems on the road, such as traffic jams or perhaps other accidents. The Saudi Arabian government is taking the necessary actions to lower the numbers. However, the increasing number of accidents and the development of technology; indicate that there is room for improvement.
In this era, drone technology plays a role domestically and internationally. It grows and enhances time and quality in many aspects such as using artificial intelligence and equipped cameras with drones to support its performance and it can determine objects [6]. One of the drone’s features that it is continuing to earn new capabilities. Drones have proven that it is a useful technology in searching and finding objects [7]. Drones consider a better method than human in detection because of their fast mobility, cost, implementation, and ease [8]. It uses for detects natural disasters, finds lost people, and report accidents. According to Air Accidents Investigation Branch (AAIB), the drone is a useful technology to detect accidents due to their cost compared with their coverage area and high quality of video and image of the accident’s site. It records a video in real-time to recognize the sites and rate of damages to respond to the accidents [9]. Drone decreases the response time to accidents. It assesses the damage immediately and sends the appropriate emergency services [10]. In line with the Saudi Vision 2030, this paper proposes a business process enhancement for car accident reports fulfilled by Najm. The Najm aids in the procedure of reporting an accident on the road and the arrival of a Najm investigator at the scene of the accident. The proposed solution using drones will help to expedite the process and minimize the turnaround time to maintain efficiency, especially during rush hours. It will measure the role of drones to report about car accidents and enhance the response time.
The paper is structured as follows. Section 2 illustrates the literature review along with a comparison. Next, section 3 shows the methodology. After that, section 4 discusses the findings. Then, section 5 contains the conclusion. Finally, section 6 presents paper recommendations.
2. Literature Review
Drone technology is widely used in many applications to enhance the quality of the service and to optimize the response time. This section presents a literature review subdivided into three sections related to enhancing turnaround time, accident detection and drone applications.
-
2.1. Enhance Response Time
-
2.2. Accident Detection
In Paper [11], this research aims to automate the process of detection and assessment car accidents using drones and deep learning without the need of police presence. The methodology was first, selecting the drones flight path through specific formulas. Second, selecting an accident scene through Panoptic deeplab, axial deeplab, and maxdeeplab. Third, specific method to calculate distance from cars to sidewalks. The research produced appropriate results in accidents. It was tested in 20 sample scenes. The iris of drone has special characteristics, and it works usefully in the field having detailed calculation of the scene. In Paper [12], the research aims to have a city that monitored and connected to each other including traffic light, traffic management, and emergency response to accidents using drones. A system includes traffic light monitoring and traffic management technology such as google maps to reroute drivers. The almost available drone is notified by an Emergency Response Handling (ERH) monitor to audit and scan the accident. The ERH decide if there is an accident or not to notify the responsible. The drones take less time to arrive to the accidents. Moreover, after the drones confirm the accident, the ERH monitor issues response unit such as firetruck, or ambulance. Moreover, the result shows that if Madinah Road in Jeddah is having traffic, then it will be rerouted to King Fahad Road instead and that is shown the traffic management using google maps. Authors in paper [13], worked on improving the accident reporting process by proposing a humanless reporting model. The framework used is based on using drones to smartly detect and report an accident. At first, a vibration sensor needs to be installed in the car; when the sensor detects an accident, it will immediately share the location of the car via satellite with the nearby police station or emergency control center from where the drones are dispatched to the location. Afterwards, the drone may take images of the crash and send them to the control center so action can be taken. The model may provide better results if implemented in real-life situations; however, the paper has limitations, and the framework proposed is not tested. The authors in [14], suggested reducing the response time by implementing a network of drones connected with a LoRaWAN protocol. The proposed module comprises three parts: the command center, intelligent drones, and a module combined with sensors. The module consists of Controller, GPS and intelligent cameras with a 360-degree view. The module can detect accidents 3.5 km away and is mounted on different locations such as towers and streets light. Once an accident is detected, it will immediately send a signal with the coordination to the drones. Thus, the drone should be on standby mode. After the drone reaches the location, it will send live data to the command center, which can quickly take action based on the data provided. As a result, the transmitter’s rate of the received package received is tested; it ranges from 55% to 100 depending on the distance; the longer the distance, the lower the packet delivery rate.
In Paper. [15], a study was conducted in 2 distinct rural communities in southern Ontario, Canada in 2020. The study aims to examine the feasibility of integrating Automated External Defibrillator (AED) delivery devices with the emergency system in rural and remote areas. In addition to the comparison between drones and ambulances in the response time in delivering automated external defibrillator (AED) devices to ambulances. 6 simulations were conducted in 2 rural communities. In simulations 1 and 2, the drone and ambulance were launched from the same medical base. However, in simulations 3 and 4, two separate medical bases were used to send the ambulance and drone. In simulations 5 and 6, the drone and ambulance were launched from two different places, where the drone was placed in the ideal location for it. Two types of drones were used, the first containing an automated external defibrillator (AED) inside the drone, and the other being externally carried by the drone. In the first four simulations, the ambulance was not allowed to exceed the speed limit, traffic lights, or use warning sirens, while in the last two simulations, all of that was allowed. This experiment took place in the ideal environment for drones in terms of weather conditions. The result was that in all 6 simulations, the drone with an automated external defibrillator (AED) arrived at the site in less time than the ambulance.
The stuy in paper [16], was conducted in Turkey in 2019. the study aims to propose a model for deploying drones to be the first respond to accidents and disasters in smart cities. Where the system consists of 3 main parties, which are the sensors deployed in the city that will notice the presence of disasters and accidents, then will send the location information of the accident to the drone. The drone automatically goes to the site and sends pictures and information to the control unit, which in turn will communicate with the concerned authorities to direct them to the site and deal with the situation. The result of the study was that First Responder Drones (FRDs) have a shorter response time than conventional response systems.
The paper [17], discussed research that aims to use UAVs in order to detect as many actions as possible on the road. It monitors and collects information about the vehicle and then sends an alert to the traffic center in real-time. The efficiency of the roads in cities is decreased due to the transport problems that consider a problem of this research. Moreover, a high cost of implementation and maintenance for other monitoring systems. This paper uses Opportunistic Method with learning methodology in three stages to implementing the technique. First, it designs UAV systems for collecting information about cars. Second, it organizes the UAVs to cover the proposed area. Third, it generates the UAV location to cover as many objects as possible. The result of this paper shows the proposed method considers a better method for detecting objects and does not require a long-traveled distance in order to use a lot of UAVs instead of using one. Moreover, the resulting value is nearby to reality.
The study in paper [18], a study was conducted in USA, Salt Lake County, Utah in 2018. The study aims to develop a system for optimal drone mounting locations to reduce response time to reports of cardiac arrest. Since time is an important factor and every passing minute reduces the chance of survival. In addition, the drone is powered by batteries, so it has a specific range to operate with, and by selecting ideal places, it can reduce the distance and speed up arrival as well. 3 factors must be considered when determining locations, namely the demand, the facilities that provide the service, and the demand-service constraints. The Backup Coverage Location Problem with Complementary Coverage (BCLP-CC) model was used to determine ideal locations using Python language. The drones will be distributed in the existing medical bases, in addition to adding external sites, as the construction of the drone launch sites does not require much work in the infrastructure. The availability of more than one drone in one site has been taken into consideration, in order to respond to several reports. The goal was for the drone to reach the site within one minute, as time is an important factor. The result was that 90.4% of cases were reached in less than one minute.
The study in paper [19], has focused on saving human life from road accidents using MQ03 and vibration sensor. MQ-03 sensor can detect the alcohol smell if the driver is drunk. The research developed a device that imports in the car to detect accidents and consider the blood alcohol concentration level. The device contains a vibration sensor to detect the accidents and activates the Global Positioning System (GPS) and Global System for Mobile communication (GSM). After that, it will send the location to the nearby hospital. The results were reliable to be implemented. Alcohol detection sensor powered if the alcohol level is more than 1 mg then the driver is drunk, and it will display an alert message. The vibrator sensor powered according to the level of vibration if it detects as an accident, then it will send a message to the hospital with the accident location.
The authors of paper [20], focused on reducing the response time taken by ambulance service due to the increase in traffic congestion. Researchers noticed that half of the rescue cases took more than a half-hour, and in half of the cases, at least 21 minutes were taken to request assistance. The module proposed integrates an Arduino with an accelerometer, vibration, and heart pulse sensors. Hence, to detect an accident, the data from the sensors need to be compared against a predefined threshold. When the system detects an accident, it is notified the driver’s smartphone through the Bluetooth module. After that, the system will be prompted to find the nearby ambulance service and pinpoint the position of the accident. The hardware module has been simulated in a virtual terminal and tested the parameter agent threshold. As a result, the module reduced the response time by optimizing the time taken to report an accident. However, the paper did not calculate the response time in a real-case scenario.
In the paper [21], a study was conducted in the USA, Louisiana, Texas, in 2021. The study aims to develop a model for predicting the severity of traffic accidents in work areas on the highway to reduce the response time for dangerous accidents, as the current model predicts fatal accidents is low. Therefore, the deep learning approach model was used to predict the severity of accidents, which are divided into 3 categories: Property Damage Only (PDO), injury, and fatality. The Python language was used to implement the model, the data was prepared and cleaned, and then the numeric data was converted into images to be dealt with by the deep learning model, in addition to using the customized f1-loss function. In the end, a comparison was made between deep learning models and support vector machine models, because (SVM)
among previous studies had the highest accuracy, so it will be compared with deep learning models to see its precision and recall. The result was that deep learning models had a higher recall value (0.67).
In the Paper [22], the research studies and implements four methods of the accident detection system using the Internet of Things (IoT). According to the problems of road traffic that have negative impacts on people’s lives, the authors propose this method to decrease the number of accidents and rate of death. The first method uses sensors to read the signs and convert them into digital signals to report the emergency services in case of an accident. The second method uses IoT, the driver must prepare the car with its device and personal information. In case of an accident, the system sends an alert with a specific location to the responsible team. The third method contains the accelerometer and vital sign sensors to measure the signs and compare them with the normal measures that are stored. If it is different, the emergency case is activated and sent alerted to the responsible team. The fourth method using driver mobile connections with car Bluetooth. In case of accidents, the driver can send voice commands as alerts. Otherwise, sends the geographical location. The result illustrates the smart detection system must be less hardware, easy to implement, and not require user interaction. Therefore, the first and fourth methods consider good methods.
In the Paper [23], the research has focused to speed up the process of detection and response to accidents that require immediate attention through IoT. The problem is when the ambulance, or fire service cannot reach the accident location fast enough due to crowded roads. The methodology was building a new device in a car called vehicle device. This device detects the accident automatically and response through five sensors by notifying emergency contact. The sensors were: Compressed Natural Gas (CNG), Smoke, Flame, Acceleration, and Piezo. Moreover, the responder Notification System has improved using Google maps and google API. The result shows the response to accidents in the lowest possible time through risk identification. In flame sensor if the risk is low, then the notification will come to the application. If the risk is medium, then the user gets notified. If the risk is high then it will send SMS to user, emergency contact, and emergency services.
The paper [24], it was conducted in India in 2020. The study aims to facilitate the process of finding the car at the time of the accident so it will reduce the possibility of deaths. The most common cause of death in road accidents is the delay in responding and providing treatment. The proposed system works by using the GPS module, GSM module, and Arduino uno. Where the movement of the car is sensed, when a change occurs, this response is divided into three cases: no accident, mild accident, and severe accident. when the case is a severe accident, an SMS message is sent to the list of people who were previously selected in addition to the emergency, and the message includes a link to the location using GPS. The result was that determining the location of the accident was accurate and that reduce the response time.
In the Paper [25], the research develops a smart system based on IoT that doesn’t require human interaction to respond to accidents immediately. It detects and reports the accident to the driver and emergency contacts in case of an accident. Moreover, it takes control over the speed through smart brake control. The problem is when the driver is unable to control the car in case of an accident due to a critical situation. The authors develop this system in order to decrease the number of road accidents and the rate of death by using the speed control system. The methodology of this research was made of Raspberry Pi for sending an email, Ultrasonic Sensor to measure the distance and a Servo motor for braking the car. The result appears in the interface in front of the driver’s seat with the distance value and the alert. If the driver does not respond in case of an accident, the system sends an alert email to the responsible person.
In the Paper [26], the research introduces a framework based on IoT that helps to detect and report accidents. The problem appears when the accident happened and there is no immediate response from nearby ambulances. This research develops a smart system based on it with an accelerometer, vibration, and heart rate sensors. The system reads these sensors and sends an alert to emergency contacts or services in case of a dangerous accident using the Global System for Mobile Communication (GSM). The result of this paper has several cases such as when the car moves when the car is static and when the driver is outside the car. It introduces the simulation result of each case with accurate reads of acceleration and heart rate sensors.
In the Paper [27], the study was conducted in the USA in 2019. The study aims to provide a quick response to the accident site to treat the injured in the accident before it is too late. As it is likely that the driver or passengers may lose consciousness when the car accident occurs, which leads to a delay in reporting the accident. The Internet of Vehicles (IoV), which uses a deep learning-based technology called DeepCrash, was suggested as a solution to this issue. The framework for this proposal consists of 3 layers, namely the sensing layer, which collects information such as captured images, and location coordinates to be sent via the network layer to the application layer, through which data will be collected and deep learning will be used, and then an ambulance will be called for the site. According to the study’s findings, the model’s accuracy was about 96%, and the average emergency response time was around 7 seconds.
-
2.3. Drones Applications
In the Paper [28], the paper aims to import drones in smart cities and make everything connected with each other such as transportation, healthcare, and houses. In the transportation field, using drones with camera to detect and assess the vehicle damage and decide to accept or reject the claim without the need of human interaction. Moreover, to help the insurance company to decide if the vehicle will be provided the insurance or not.
Authors in paper [29], studied the time series analysis and wastage of blood delivery by drones. Data was gathered and studied from 20 health facilities in Rwanda from drone operators and two sources Regional Centre for Blood Transfusion estimates and Google Maps). A cross-sectional comparison of data regarding the delivery times was conducted in addition to performing interrupted time series analysis to assess changes in blood product expirations. The study found that drones delivered 43% of blood product orders out of 12733 emergency orders. The delivery was 79 min faster than the existing road delivery based on estimation and 98 min faster based on GoogleMaps. The decrease in mean delivery time ranged from 3 min to 211 min. Additionally, blood unit expirations were decreased by 7·1 per month after the start of drone delivery which translated to a 67% reduction at 12 months.
The Paper [30], discussed the deployment of UAV technology in many fields such as monitoring, entertainment, and photography is successful. Therefore, it was the motivation for research authors to use UAVs in road traffic problems. The methodology of this research paper consists of three stages. First, use UAV-based video to address the objects on the roads. Second, assess the risk of these objects. Third, determine the possible characteristics of collision in each object on the road. The result illustrates the captured data by UAV and processed by deep learning networks. It specifies the objects, factors, and the assessment of the risk on the road.
Authors in paper [31], observed the low survival rates of out-of-hospital cardiac arrest (OHCA). Therefore, the paper investigated the feasibility of automated external defibrillator (AED) delivery by drones to increase the survival rate. Three drones were placed within controlled airspace and integrated with the emergency medical services. Once there is a suspected OHCA, the dispatcher will send an ambulance and a drone to deliver the AED. The system was simulated prior to the study over four months in 2020. The study found that 12 alerts handled by drone with a 3.1 km median, and delivery was successful in 11 alerts 92%. Additionally, drones arrived prior to ambulances in 64% of the cases. Furthermore, 61 test flights performed, and the delivery success rate was 90%.
Authors in paper [32], proposed a solution to automate the damage inspection and cost estimation process. in a typical case scenario, an accident estimation needs to be completed by an engineer who has to travel to estimate the cost. The paper suggested using a drone that uses deep learning models to lower human intervention and reduce processing time. The drones are automatically scheduled to visit the accident site to gather and analyze the data. Researchers developed two phases; In the first phase, deep learning is applied using CNN Model to identify and classify the objects from the image. Moreover, In the second phase, the damage is measured to estimate the overall cost of the accident. After all, the two-phase approach is evaluated using data from multiple accidents, the classification accuracy obtained varies between 0.79 and 0.94 and the damage estimation is 100% accepted by the expert.
In the paper [33], the research uses Unmanned Aerial Vehicles (UAV) and deep learning to recognize moving objects in road traffic. The problem appears in increasing the transport problem due to the rapid development of smart cities. Moreover, to analyze the road traffic in real-time. The proposed methodology is to implement the UAV in the monitoring and congestion analysis of road traffic. The result of this research paper appears correctly in three stages. First, the UAV recognizes moving objects on the road such as motorbikes, vehicles, and humans. Second, it calculates the traffic measurement for the objects. Third, it analyzes the congestion of road traffic.
Table 1. Enhance response time literature review summary
|
Paper |
Year |
Aim |
Method |
Outcome |
Limitation |
|
[11] |
2022 |
Automate car accident detection and assessment without police presence |
It uses drones and deep learning |
The result has shown accident scenes with good quality and measurement of objects |
|
|
[12] |
2021 |
Connected roads including traffic lights, and accidents emergency response |
It uses drones, google maps, and Emergency Response Handling (ERH) |
Drones take less time to arrive the destination. The traffic management is activated through rerouting emergency services |
The process of confirming accidents takes time |
|
[13] |
2020 |
Improving the accident reporting process |
Use of IoT and Gps service |
The model may provide better results if implemented in real-life situations, only framework is suggested |
Framework proposed is not tested |
|
[14] |
2020 |
Reducing the response time |
Network of drones connected with a LoRaWAN protocol |
The transmitter's rate of the received package received is tested; it ranges from 55% to 100 depending on the distance |
Only transmitter is tested |
|
[15] |
2020 |
Make a feasibility study for integrating the drones that deliver AED devices with the emergency system and make comparisons. |
6 simulations conducted in 2 rural communities |
Drone was able to deliver the AED to the scene of the cardiac arrest before the arrival of the ambulance |
The drone has not been tested in different weather conditions |
|
[16] |
2019 |
Proposing a paradigm for deploying drones as first responders to a disaster or an accident scene in smart cities. |
The system comprises three sections: sensory system, intelligent drones, and control station. |
First Responder Drones (FRDs) have a shorter response time than conventional response systems. |
|
|
[17] |
2018 |
Detects actions on the road using UAVs and alerts traffic centers in real-time |
Opportunistic Method with Learning |
The OPL method is better with real values and less-traveled distance. |
The implementation done on single car with low speed. |
|
[18] |
2018 |
Minimize the response times of drones that deliver AED devices by located in optimized locations |
The Backup Coverage Location Problem with Complementary Coverage (BCLP-CC) |
90.4% out-of-hospital cardiac arrests can be responded to within 1 min by using 71 drones and 68 launch sites |
Table 2. Accident detection literature review summary
|
Paper |
Year |
Aim |
Method |
Outcome |
Limitation |
|
[19] |
2022 |
Detects accidents and measures the alcohol level of driver. |
It uses IoT, a vibration sensor, MQ-03, GPS, and GSM. |
Detect accidents and notify hospitals. Also, measure alcohol level to alert driver |
It depends on vibration only to detect accidents and device must be powered within a car. |
|
[20] |
2021 |
Propose a module for accident detection to enhance response time |
Arduino with an accelerometer, vibration, and heart pulse sensors. |
Simulated in a virtual terminal and tested the parameter agent threshold |
Did not calculate the response time in a real-case scenario. |
|
[21] |
2021 |
Prediction of the severity of traffic. |
Deep learning-based approach with support vector machine models. |
They achieved a significantly higher recall value (0.67). |
|
|
[22] |
2020 |
Implements and compares four methods of the accident detection system using the Internet of Things (IoT). |
Driver mobile, microcontroller, and sensors (vibration, accelerometer, and heart sensors) |
Less hardware, easy to implement, and not require user interaction. |
High cost to implement methods with medical sensors |
|
[23] |
2020 |
Detect accidents through sending accident location to emergency services/users |
IoT, google maps, and five sensors (Flame, Compressed Natural Gas (CNG), Acceleration, Smoke, and Piezo) |
A developed device detects accidents and contacts emergency users and services. |
The device must be within a car to detect and activate accident response. |
|
[24] |
2020 |
Helps to lessen the possibility of aid delivery delays and allows for the real-time pursuit of a vehicle. |
They use the GPS module, GSM module, and accelerometer are interfaced with Arduino uno which acts as the controller. |
Predict the occurrence of the accident correctly in addition to the accuracy of the location. |
|
|
[25] |
2019 |
Develops the Smart Brake system to control the car’s speed and notify the emergency contacts. |
Raspberry Pi to send an email, Ultrasonic Sensor to measure the distance, and a Servo motor to brake the car. |
The sensor’s data and alerts appear in the driver’s interface and send alert email. |
The alert sends to the email instead of SMS which is better. |
|
[26] |
2019 |
Detects and reports the accident using IoT. |
Accelerometer, vibration, and heart rate sensors. |
Introduce the simulation result of three cases of car (i.e., static, moving, static and driver outside). |
The high costs for implementation and maintenance of heart rate sensor. |
|
[27] |
2019 |
Detect head-on and singlevehicle accidents and emergency alert mechanism |
Internet of Vehicles (IoV) system use GPS module, axis sensor, OBDII bridge and camera. |
Accuracy of traffic collision detection reaches 96% and the average response time approximately 7 s. |
Table 3. Drones applications literature review summary
|
Paper |
Year |
Aim |
Method |
Outcome |
Limitation |
|
[28] |
2022 |
Activates drones to connect everything with each other in smart cities. |
It uses a drone's camera. |
It detects, assesses accidents, and helps insurance companies services. |
It disables human interaction which is a challenge to depend on technology only. |
|
[29] |
2022 |
Time series analysis and wastage of blood delivery by drones. |
Data was gathered and studied from 20 health facilities and analyzed. |
The delivery of blood was 79 min faster with drone and blood unit expirations were decreased by 7·1 per month. |
|
|
[30] |
2022 |
Uses UAV technology in road traffic problems due to UAV’s success in many fields (e.g., monitoring, entertainment, and photography). |
It uses UAV-based video to capture the data and deep learning for processing. |
The result illustrates the objects, factors, and the assessment of the risk on the road. |
It unable to notifying the responsible person in case of potential risk or an accident occurs. |
|
[31] |
2021 |
Investigated the feasibility of automated external defibrillator (AED) delivery by drones. |
AED delivery by drones. |
Drones arrived prior to ambulances in 64% of the cases. |
Tested in controlled area only. |
|
[32] |
2019 |
Propose a solution to automate the damage inspection and cost estimation process. |
Drone with deep learning models. |
Classification accuracy obtained varies between 0.79 and 0.94 |
|
|
[33] |
2019 |
Recognizes the moving objects in road traffic and analysis the road traffic in real-time. |
It uses UAV and Deep Learning. |
The result shows images with details for the road objects, the traffic measurements for each object, and an analysis of the congestion of road traffic. |
It is unable to detect and respond the accidents immediately. |
|
[34] |
2019 |
Using drones with lower cost and high-quality camera to record accidents locations. |
It uses UAV, GPS, and Root Mean Square Error (RMSE). |
The 4k camera after recording can export 24 pictures at a second with resolution 8 megapixels. |
In the paper [34], the research aims to use low-cost drones with good quality of scanning accident’s locations through a 4K video recording camera. There are some points the police officers may miss to record during the accidents. Moreover, the Spanish traffic uses 2D tools. Therefore, the results may not be accurate. To get an appropriate assessment of accidents, using Root Mean Square Error (RMSE) to measure the quality of the lowest cost of UAS using 4k recording camera with GPS functions. The drone flies for 10 minutes in 65 heights. The testing method was applied to an accident scene using American Society for Photogrammetry and Remote Sensing (ASPRS). Moreover, 4K camera extracts 24 images in a second with 8 megapixels of resolution. The results show its activity in this paper in accuracy.
The previous related work illustrates how the use of drones has benefited many applications in different fields, either by providing an optimized response time or increasing the quality of the service. A summary of all papers is shown in three tables. Table 1 summarizes related work concerns enhancing response time; Table 2 summarizes accident detection. Finally, drone applications related work is shown in Table 3.
3. Methodology
This paper follows BPM lifecycle approach which contains many steps must be followed to obtain results of the research. This section illustrates the process identification, process discovery (As-Is model), process analysis, and process re-design (To-Be model) of the enhanced accident response process.
-
3.1. Process Identification
-
3.2. Process Discovery (As-Is)
Process identification is the initial phase of Business Process Management (BPM). It works by studying and understanding the current system’s process, functions, requirements, and actors. Moreover, process identification helps to well-understand the process and know the drawbacks. Therefore, it is required for the next phases which are analysis (As-Is) and redesign (To-Be) to enhance the process and achieve the best outcome. The data of this research paper collects from real-world experiences and Najm’s official website.
According to the result, the accident response process involves three actors (i.e., driver, najm worker, and department of traffic). It starts when the driver reports an accident to the Najm office in order to respond the accident. The current process depends on the presence of the Najm worker at the accident location, which is led to cause several issues. First, long response time due to the delay of the Najm worker to arrive at the accident’s destination. Moreover, the road may be crowded, and another road traffic may be affected. Second, the current process consumes time while the accident parties fill statements on paper instead of filling them electronically which may lead to losing the paper. Therefore, it wastes paper and impacts the environment. Third, the assessment could be unfair or inaccurate because of the image quality that has been taken by the Najm worker’s phone. Moreover, the accident’s image will be lost if the Najm worker’s phone is lost or damaged. Finally, the manual method in the accident response process is unable to quickly respond with accurate assessment for accident parties.
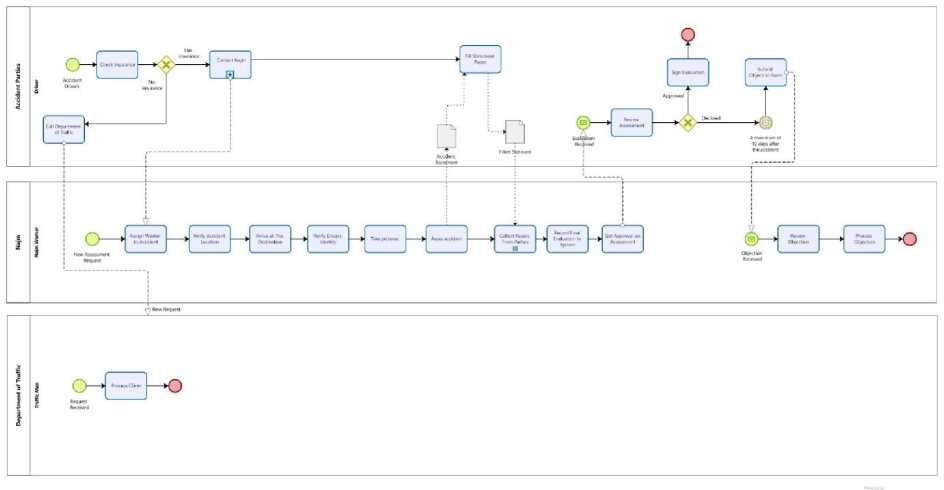
Fig.1. Najm request handling As-Is model
Scenario
Figure 1 illustrates the business process of Najm accident request handling. At first, when any car accident occurs, the first thing to do is to inform the authorities. If one of the drivers does not have valid insurance, the process must be completed by the department of traffic. On the other hand, if both drivers have valid insurance, Najm must be contacted to record the incident in one of three ways: by phone call, by WhatsApp, or by Najm application. Secondly, the company will assign a Najm worker to the case to handle and assist with the situation. The Najm worker will call the applicant and verify the accident location. When the Najm worker finally reaches the destination, he will verify the driver’s identity and take pictures of the accident. Consequently, the Najm worker will assess the accident, and each driver fill statement paper. After that, Najm worker collects the driver’s statement on paper, which will assist in determining the percentage of fault responsibility for each driver. Finally, the driver reviews the assessment to either approve or decline the assessment. The driver approves the accident assessment by signing on the final evaluation. Otherwise, if it is declined by the driver, the driver needs to raise his claim to Najm and must be submitted within a period not exceeding 10 days. The claim will be reviewed and processed by the responsible team. Figure 1 shows the hide sub-process diagram (collapse), Figure 2 shows the sub-process diagram (expand).
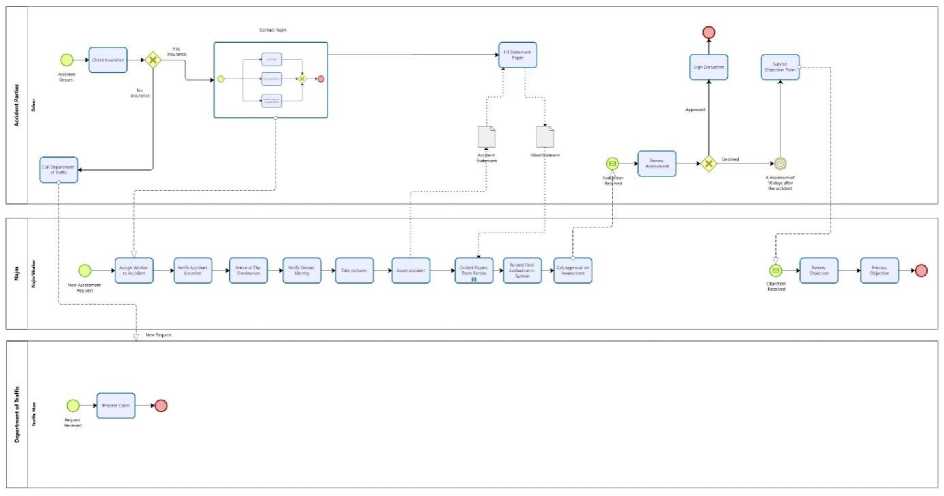
Fig.2. Najm request expanded As-Is model
-
3.3. Process Analysis
-
A. Qualitative Analysis
-
a. Value-Added Analysis
Table 4 below illustrates the value added (VA), business value added (BVA), and non-value added (NVA) to the business process. It contains steps, its performer, and its classification.
-
b. Root-cause Analysis
Fishbone diagram is a tool for root cause analysis. It uses to identify the possible causes of a problem. Figure 3 shows a fishbone diagram that illustrates six causes with details affecting the accident response time and assessment documentation.
Table 4. Classification of business process
|
Activity |
Performer |
Classification |
|
Check Insurance |
Driver |
VA |
|
Call Department of Traffic |
Driver |
VA |
|
Contact Najm |
Driver |
VA |
|
Assign Worker to Accident |
Najm |
BVA |
|
Verify Accident Location |
Najm |
NVA |
|
Arrive at The Destination |
Najm |
BVA |
|
Verify Drivers Identity |
Najm |
BVA |
|
Assess Accident |
Najm |
BVA |
|
Take Pictures |
Najm |
NVA |
|
Fill Statement Paper |
Driver |
NVA |
|
Collect Papers from Parties |
Najm |
NVA |
|
Record Final Evaluation in System |
Najm |
BVA |
|
Get Approval on Assessment |
Najm |
BVA |
|
Review Assessment |
Driver |
VA |
|
Sign Evaluation |
Driver |
VA |
|
Submit Objection Form |
Driver |
VA |
|
Review Objection |
Najm |
BVA |
|
Process Objection |
Najm |
BVA |
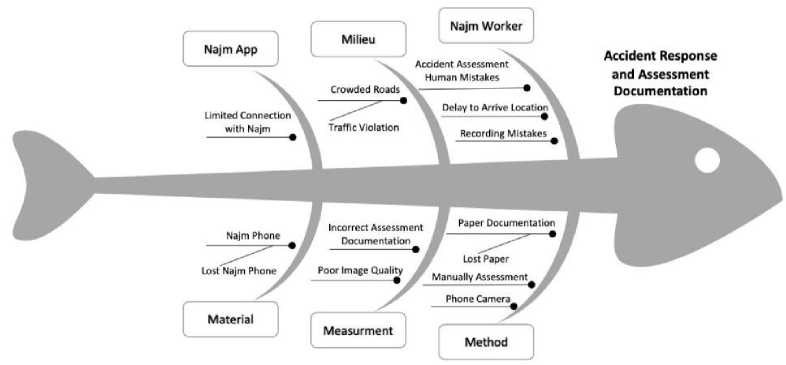
Fig.3. Cause-effect (fishbone) diagram
-
B. Quantitative Analysis
-
a. Flow Analysis
Table 5 illustrates the approximate cycle time for each action in the accident response process by Najm.
-
b. Simulation
As part of the business process analysis, a process simulation is initiated by using Bizagi software to identify opportunities for improvement. Table 6 shows the summarized simulation result of the handling new accident assessment request (As-Is) process in Najm. The flow is tested with an input of 1000 requests as recommended process instances by Bizagi; however, the simulation shows a significant delay in the turnaround time of the “Arrive at The Destination” process reached a total time equals 20000 minutes and an average equals 20 minutes. In view of this finding, the simulation shows that the “Arrive at The Destination” activity is a bottleneck of the overall operation and affects organizational efficiency.
-
3.4. Process Re-design (To-be)
Table 5. Flow analysis
|
Activity |
Cycle Time |
|
Check insurance |
30 s |
|
Call Najm |
5 m |
|
WhatsApp Najm |
3 m |
|
Submit Request in Application |
3 m |
|
Assign Worker to Accident |
3 m |
|
Verify Accident Location |
2 m |
|
Arrive at The Destination |
20 m |
|
Verify Drivers Identity |
8 m |
|
Take Pictures |
10 m |
|
Assess Accident |
5 m |
|
Fill Statement Paper |
7 m |
|
Collect Papers from Parties |
30 s |
|
Record Final Evaluation in System |
5 m |
|
Get Approval on Assessment |
5 m |
|
Review Assessment |
1 m |
|
Sign Evaluation |
10 s |
|
Total Time |
1:28:00 h |
Table 6. Bizagi As-Is simulation
|
Activity |
Type |
Instances completed |
Instan-ces started |
Min. time (m) |
Max. time (m) |
Avg. time (m) |
Total time (m) |
|
Najm |
Process |
1000 |
1000 |
58.5 |
58.5 |
58.5 |
58500 ~ 40d 15h |
|
Record Final Evaluation in System |
Task |
1000 |
1000 |
5 |
5 |
5 |
5000 |
|
Get Approval on Assessment |
Task |
1000 |
1000 |
5 |
5 |
5 |
5000 |
|
Assign Worker to Accident |
Task |
1000 |
1000 |
3 |
3 |
3 |
3000 |
|
Verify Accident Location |
Task |
1000 |
1000 |
2 |
2 |
2 |
2000 |
|
Verify Drivers Identity |
Task |
1000 |
1000 |
8 |
8 |
8 |
8000 |
|
Collect Papers from Parties |
Task |
1000 |
1000 |
0.5 |
0.5 |
0.5 |
500 |
|
Take Pictures |
Task |
1000 |
1000 |
10 |
10 |
10 |
10000 |
|
Assess Accident |
Task |
1000 |
1000 |
5 |
5 |
5 |
5000 |
|
Arrive at The Destination |
Task |
1000 |
1000 |
20 |
20 |
20 |
20000 |
|
New Assessment Request |
Start event |
1000 |
Scenario
Figure 4 illustrates the improved business process of Najm accident report handling. At first, after an accident happened, the accident parties will inform the authorities. There are two cases if one of the parties to the accident does not have insurance, the department of traffic is contacted and complete the process. But if they all have insurance, a Najm must be contacted to record the accident scene through a phone call, WhatsApp, or the Najm application. Secondly, the company will assign a Najm worker to the case to handle and assist with the situation. The Najm worker will call the applicant and verify the accident location. Third, Najm will send the nearest drone to the accident location in order to verify the driver’s identities and record the accident scene through the drone’s camera. After that, the accident parties will receive SMS link to fill statement form and submit it electronically. Finally, Najm worker will record the final evaluation of the accident and the drivers can either approve or decline the assessment. The driver approves the accident assessment by signing on the final evaluation. Otherwise, if it is declined by the driver, the driver needs to raise his claim to Najm. The claim must be submitted within a period not exceeding 10 days. After that, the claim will be reviewed and processed by the responsible team.
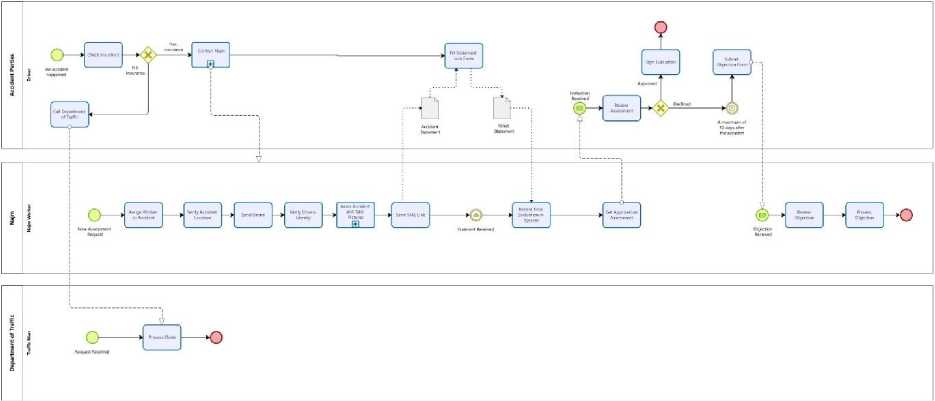
Fig.4. Najm request handling To-Be model
4. Results and Discussion
This section will present the simulation result of the To-Be model after re-engineering process. Then, a comparison between As-Is and To-Be simulation results will be analyzed to validate the proposed model.
-
4.1. To-be Simulation
-
4.2. Simulation Comparison
This paper tested the use of drone technology to accelerate the process and enhance the response time. In addition, automating the collection of statement process was suggested instead of typical paper use to optimize performance and for archiving purposes. The validation of the enhanced process following BPM methodology was monitored using the findings of the time analysis simulation. The analysis indicated that there was an improvement in overall turnaround time. By comparing the current situation and the proposed model, the integration of drones in Najm claim handling process has optimized the process by 23500 min tested with 1000 instances only. The difference between As-Is and To-Be simulation is shown in Table 8, which was calculated using the formula:
The simulation is performed using Bizagi modular software shown in Figure 5 to validate the To-Be model of handling the new accident assessment report process in Najm.
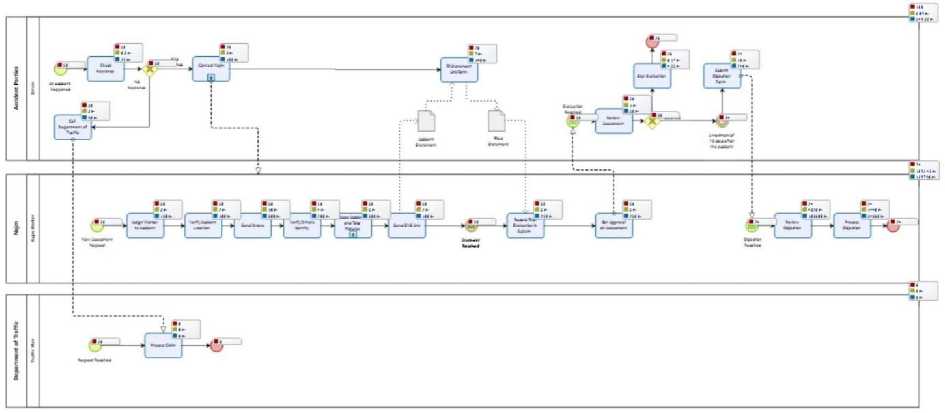
Fig.5. To-Be model simulation
The flow is tested with an input of 1000 requests only as process instances which is a default number in Bizagi. The below Table 7 summarizes the simulation result with a total process time equal to 35000 approx. 24d 7h 20m per 1000 instances.
( AsIsTotalTime - ToBeTotalTime ) (1)
Table 7. Bizagi To-Be simulation
|
Activity |
Type |
Instances completed |
Instan-ces started |
Min. time (m) |
Max. time (m) |
Avg. time (m) |
Total time (m) |
|
Najm |
Process |
1000 |
1000 |
45m |
45m |
45m |
35000 ~24d 7h 20m |
|
Record Final Evaluation in System |
Task |
1000 |
1000 |
5m |
5m |
5m |
5000 |
|
Get Approval on Assessment |
Task |
1000 |
1000 |
5m |
5m |
5m |
5000 |
|
Assign Worker to Accident |
Task |
1000 |
1000 |
3m |
3m |
3m |
3000 |
|
Send Drone |
Task |
1000 |
1000 |
10m |
10m |
10m |
10000 |
|
Verify Drivers Identity |
Task |
1000 |
1000 |
8m |
8m |
8m |
8000 |
|
Verify Accident Location |
Task |
1000 |
1000 |
2m |
2m |
2m |
2000 |
|
Send SMS Link |
Task |
1000 |
1000 |
2m |
2m |
2m |
2000 |
|
New Assessment Request |
Start event |
1000 |
|||||
|
Statement Received |
event |
1000 |
1000 |
||||
|
Assess Accident and Take Pictures |
Process |
1000 |
1000 |
10m |
10m |
10m |
15000 |
The process was improved by 40%; the percentage was calculated using the below formula; where A represents the total time spent in the To-Be model and C represents the total time spent in the As-Is model [35]. The result shows a negative result which indicates a decrease in cycle time, hence, an improvement.
(( C - A ) /C ) ∗ 100 (2)
By looking at the before and after analysis, we conclude that the use of drones and automation has a significant positive impact on Najm process cycle time. As shown, the proposed To-Be model is faster than the As-Is model by 40%. In addition, we recommend deploying the technology to help assist in minimizing the drawbacks of blocking the road by car accidents, especially during rush hours .
Table 8. Simulation comparison
|
Model |
Total Time |
|
As-Is Model |
58500 minutes |
|
To-be Model |
35000 minutes |
|
Difference |
23500 minutes |
5. Conclusion and Future Work
This paper has focused on enhancing response time of cars accidents through developing Najm services in Saudi Arabia. It will aid in accelerating the procedure and reducing the time it takes to ensure efficiency during peak hours of reporting accidents. The methodology followed was Business Process Management (BPM). It identifies and analyses the process through qualitative and quantitative methods. The root-cause analysis and value-added analysis for qualitative analysis. The flow analysis and simulation for quantitative analysis. However, the enhancement process has improved by using drones and replacing manual processes with automated technology to speed up response time and raise quality of reporting the accidents. The result has been validated by comparing the As-Is and To-Be models using Bizagi modular software. It shows an improvement rate of 40% in performance. Therefore, drones can contribute to enhance the Najm services. To further enhance the paper as future work, the assessment can be without human interaction and has a decisionmaking mechanism based on deep learning algorithms. Moreover, the travel time taken by the drone can be tested in a real-life scenario to measure accuracy.
6. Recommendations
This paper suggests using drones to respond to accident reports, as they do not follow the path of cars and are not affected by crowds, so their arrival time will be faster, in addition to the ability of drones to record accident scenes accurately. Finally, automation can optimize the process since parties can file accident statements through a sent link via SMS message.
References Accident Response Time Enhancement Using Drones: A Case Study in Najm for Insurance Services
- Ali Ahmed Mohammed, Kamarudin Ambak, Ahmed Mancy Mosa, and Deprizon Syamsunur. A review of traffic accidents and related practices worldwide. The Open Transportation Journal, 13(1), 2019.
- Li-Lu Sun, Dan Liu, Tian Chen, and Meng-Ting He. Road traffic safety: An analysis of the cross-effects of economic, road and population factors. Chinese journal of traumatology, 22(05):290–295, 2019.
- macrotrends. Saudi arabia population growth rate 1950-2022. macrotrends.net, 2022.
- Heidi Worley. Road traffic accidents increase dramatically worldwide. prb.org, 2006.
- PETE ORTIZ. 10 saudi arabia car accident statistics and facts. housegrail.com, 2022.
- Daeil Jo Lee, Sedam and Y. Kwon. Camera-based automatic landing of drones using artificial intelligence image recognition. International Journal of Mechanical Engineering and Robotics Research, 2022.
- Wojciech Wr´oblewski Tu´snio, Norbert. The efficiency of drones usage for safety and rescue operations in an open area: A case from poland. Sustainability, 2022.
- Mohammadjavad Khosravi, Rushiv Arora, Saeede Enayati, and Hossein Pishro-Nik. A search and detection autonomous drone system: from design to implementation. arXiv preprint arXiv:2211.15866, 2022.
- Stuart Hawkins. Using a drone and photogrammetry software to create orthomosaic images and 3d models of aircraft accident sites. In ISASI 2016 Seminar, pages 17–20, 2016.
- Anders Schmidt Kristensen, Dewan Ahsan, Saqib Mehmood, and Shakeel Ahmed. Rescue emergency drone for fast response to medical emergencies due to traffic accidents. International Journal of Health and Medical Engineering, 11(11):637–641, 2017.
- Anton Saveliev, Valeriia Lebedeva, Igor Lebedev, and Mikhail Uzdiaev. An approach to the automatic construction of a road accident scheme using uav and deep learning methods. Sensors, 22(13):4728, 2022.
- Abdurrahman Beg, Abdul Rahman Qureshi, Tarek Sheltami, and Ansar Yasar. Uav-enabled intelligent traffic policing and emergency response handling system for the smart city. Personal and Ubiquitous Computing, 25(1):33–50, 2021.
- Albin Libi Madana and Vinod Kumar Shukla. Conformity of accident detection using drones and vibration sensor. pages 192–197, 2020. doi:10.1109/ICRITO48877.2020.9197783.
- Joel Lemayian and J. M. Hamamreh. Autonomous first response drone-based smart rescue system for critical situation management in future wireless networks. RS Open Journal on Innovative Communication Technologies, 05 2020. doi:10.46470/03d8ffbd.b0ec5747.
- Sheldon Cheskes, Shelley L McLeod, Michael Nolan, Paul Snobelen, Christian Vaillancourt, Steven C Brooks, Katie N Dainty, Timothy CY Chan, and Ian R Drennan. Improving access to automated external defibrillators in rural and remote settings: a drone delivery feasibility study. Journal of the American Heart Association, 9(14):e016687, 2020.
- Joel P Lemayian and Jehad M Hamamreh. First responder drones for critical situation management. In 2019 Innovations in Intelligent Systems and Applications Conference (ASYU), pages 1–6. IEEE, 2019.
- Mouna Elloumi, Riadh Dhaou, Benoit Escrig, Hanen Idoudi, and Leila Azouz Saidane. Monitoring road traffic with a uav-based system. In 2018 IEEE Wireless Communications and Networking Conference (WCNC), pages 1–6. IEEE, 2018.
- Aaron Pulver and Ran Wei. Optimizing the spatial location of medical drones. Applied Geography, 90:9–16, 2018.
- GAE Satish Kumar, J Swetha Priyanka, and AS Deepthi. Vehicle accident and alcohol detection system using iot platform. Indian Journal of Science and Technology, 15(39):2004– 2010, 2022.
- M Karthikeyan, VS Manesh, Lalith S Krishna, B Vijay, R Vishwabharan, and E Prabhu. Iot based accident detection and response time optimization. pages 358–363, 2021. doi:10.1109/ICCMC51019.2021.9418272.
- Md Adilur Rahim and Hany M Hassan. A deep learning based traffic crash severity prediction framework. Accident Analysis & Prevention, 154:106090, 2021.
- Mahziar Mohammadrezaei, Hamed Shahbazi Fard, Reza Pourmohammadhosein Niaky, and Behnam Soltani Taqi Dizaj. Iot-based vehicular accident detection systems. 2020.
- Sahriar Habib, Zawata Afnan, Sakib Anam Chowdhury, Sarah Altaf Chowdhury, and Abu SM Mohsin. Design and development of iot based accident detection and emergency response system. pages 35–42, 2020.
- Rajvardhan Rishi, Sofiya Yede, Keshav Kunal, and Nutan V Bansode. Automatic messaging system for vehicle tracking and accident detection. In 2020 International Conference on Electronics and Sustainable Communication Systems (ICESC), pages 831–834. IEEE, 2020.
- Mubashir Murshed and Md Sanaullah Chowdhury. An iot based car accident prevention and detection system with smart brake control. In Proc. Int. Conf. Appl. Techn. Inf. Sci.(iCATIS), volume 23, 2019.
- Shivani Sharma and Shoney Sebastian. Iot based car accident detection and notification algorithm for general road accidents. International Journal of Electrical & Computer Engineering (2088-8708), 9(5), 2019.
- Wan-Jung Chang, Liang-Bi Chen, and Ke-Yu Su. Deepcrash: a deep learning-based internet of vehicles system for head-on and single-vehicle accident detection with emergency notification. IEEE Access, 7:148163–148175, 2019.
- Mehtab Alam, Akshay Chamoli, and Nabeela Hasan. Smart cities and internet of drones. 2022.
- Marie Paul, Marie Paul Nisingizwe, Pacifique Ndishimye, Katare Swaibu, Ladislas Nshimiyimana, Valentine Dushimiyimana, Jean Pierre Musabyimana, Musanabaganwa Clarisse, Nsanzimana Sabin, and Michael Law. Effect of unmanned aerial vehicle (drone) delivery on blood product delivery time and wastage in rwanda: a retrospective, cross-sectional study and time series analysis. 10:e564–e569, 03 2022. doi:10.1016/S2214-109X(22)00048-1.
- Shuya Zong, Sikai Chen, Majed Alinizzi, and Samuel Labi. Leveraging uav capabilities for vehicle tracking and collision risk assessment at road intersections. Sustainability, 14(7):4034, 2022.
- Sofia Schierbeck, Jacob Hollenberg, Anette Nord, Leif Svensson, Per Nordberg, Mattias Ringh, Sune Forsberg, Peter Lundgren, Christer Axelsson, and Andreas Claesson. Automated external defibrillators delivered by drones to patients with suspected out-of-hospital cardiac arrest. European heart journal, 43, 08 2021. doi:10.1093/eurheartj/ehab498.
- M Adel Serhani, Tony T. Ng, Asma Al Falasi, Meera Al Saedi, Fatima Al Nuaimi, Hamda Al Shamsi, and Al Damani Al Shamsi. Drone-assisted inspection for automated accident damage estimation: A deep learning approach. pages 682–687, 2019. doi:10.1109/ICUFN.2019.8806100.
- Huaizhong Zhang, Mark Liptrott, Nik Bessis, and Jianquan Cheng. Real-time traffic analysis using deep learning techniques and uav based video. In 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), pages 1–5. IEEE, 2019.
- Juan Antonio P´erez, Gil Rito Gon¸calves, Jos´e Manuel Galv´an Rangel, and Pedro Fuentes Ortega. Accuracy and effectiveness of orthophotos obtained from low cost uass video imagery for traffic accident scenes documentation. Advances in Engineering Software, 132:47– 54, 2019.
- Calculator Academy Team. Improvement percentage calculator. calculator.academy
