Адаптация маятникового акселерометра компенсационного типа к возмущающим факторам космического пространства

Автор: Буянкин Михаил Петрович, Ватутин Михаил Алексеевич, Ключников Алексей Игоревич
Рубрика: Управление сложными системами
Статья в выпуске: 1, 2020 года.
Бесплатный доступ
Рассматривается способ адаптации маятникового акселерометра компенсационного типа системы управления космическими аппаратами к длительному действию возмущающих факторов орбитального полета. Способ основан на использовании методики самоконтроля маятникового акселерометра компенсационного типа, позволяющей проводить самоконтроль в процессе эксплуатации. Способ позволяет учесть деградацию параметров составных элементов акселерометра в условиях длительного воздействия факторов космического пространства.
Маятниковый акселерометр компенсационного типа, самоконтроль параметров, адаптация
Короткий адрес: https://sciup.org/148309061
IDR: 148309061 | УДК: 629.7.05 | DOI: 10.25586/RNU.V9187.20.01.P.055
Adaptation of pendulum accelerometer compensatory type to perturbing factors of outer space
A method adaptation of the pendulum accelerometer compensation type of the spacecraft control system to the long-term action of perturbing factors of orbital flight is considered. The method is based on the use of self-monitoring techniques pendulum accelerometer compensation type. The method allows to take into account the degradation of the parameters of the components of the accelerometer in conditions of prolonged exposure to space factors.
Текст научной статьи Адаптация маятникового акселерометра компенсационного типа к возмущающим факторам космического пространства
Одной из важнейших задач по дальнейшему развитию космической техники является значительное продление сроков активного существования малых космических аппаратов (МКА). Продление сроков службы МКА в большой степени зависит от исправной работы с заданными характеристиками многих систем и устройств, их составляющих, в частности метрологических характеристик датчиков первичной информации (ДПИ).
Одним из основных ДПИ бортового информационно-измерительного комплекса (БИИК) являются акселерометры. Важнейшая характеристика акселерометра – стабильность его работы как средства измерения [9]. Важным параметром ДПИ является коэффициент преобразования входной величины в выходной сигнал k пр и стабильность его значения во времени [5]. Использование методики метрологического самоконтроля маятникового акселерометра компенсационного типа [1] позволяет проводить метрологический диагностический самоконтроль в процессе эксплуатации: определение отклонения от опорного значения диагностического параметра – собственной частоты акселерометра, характеризующего критическую составляющую его погреш ности – дрейф k пр [2]. Современные средства эл ектронной компонентной базы позво-
56 Выпуск 1/2020
ляют идентифицировать данное отклонение с относительной предельной погрешностью 5 к ПР = 0,00042% = 4,2 - 10 - 4 %.
В процессе орбитального полета возмущающие факторы с априорно неопределенными характеристиками [3] воздействуют как на параметры самого датчика, так и на параметры регулирующего устройства, используемого для адаптации [6].
Исходя из сказанного, необходима разработка соответствующего способа адаптации, учитывающего данную деградацию и использующего методику самоконтроля, основанную на контроле собственной частоты акселерометра [Там же].
Способ адаптации маятникового акселерометра компенсационного типа к возмущающим факторам с априорно неопределенными характеристиками
Исходными данными является структурно-динамическая схема акселерометра с аппаратным регулированием k пр (рис. 1).
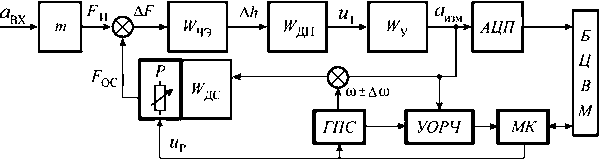
Рис. 1. Структурно-динамическая схема акселерометра с аппаратным регулятором: aВХ – измеряемое ускорение; aИЗМ – измеренное ускорение; m – масса чувствительного элемента (ЧЭ); FИ – сила, обусловленная измеряемым ускорением; FОС – сила обратной связи, создаваемая датчиком силы (ДС); Δ F – разность сил; WЧЭ , WДП , WУ, WДС – передаточные функции ЧЭ, датчика перемещения, усилителя, ДС соответственно; Δh – величина отклонения ЧЭ акселерометра; u1 – напряжение на выходе электромеханической части акселерометра; u – напряжение на выходе акселерометра (замкнутой системы); uР – регулирующее напряжение; ω ± Δω – гармонический сигнал; Р – регулятор; ГПС – генератор прямого синтеза; УОРЧ – устройство определения резонансной частоты; МК – микроконтроллер
Коррекция коэффициента преобразования (адаптация) производится изменением сигнала u P, который осуществляет регулирование коэффициента передачи регулятора, встроенного в датчик силы [7; 8; 10].
Рассматривая данный способ адаптации акселерометра с точки зрения функционирования бортового комплекса управления (БКУ) МКА, поясним его суть блок-схемой (рис. 2).
Разработанный способ заключается в выполнении следующих операций:
-
1. Ввод начальных условий, заданных на этапе предстартовой подготовки МКА, начальных значений параметров акселерометра.
-
2. Обеспечение a вх ≈ 0 путем выключения целевой аппаратуры и приводов. Данное условие позволит определить текущее смещение нуля ∆ a 0 акселерометра.
-
3. Выдача команды из БКУ МКА в БИИК на подготовку ДПИ к проведению измерений. Для акселерометра как составной части измерительного модуля, определяющего параметры движения центра масс МКА, это подразумевает проведение самоконтроля параметров и адаптацию.
-
4. Проведение самоконтроля параметров акселерометра перед началом измерений согласно методике.
-
5. Получение результата самоконтроля: наличие отклонения коэффициента преобразования A k пр = | k пр - k Д | от допустимых пределов A к пр > A к доп .
-
6. Подбор коэффициента передачи регулирующего устройства k P( u P) итерационным алгоритмом (методом двоичного поиска) для обеспечения условия ∆ k пр ≤ ∆ k доп [4]. Суть данного процесса можно отразить следующим выражением:
Буянкин М.П., Ватутин М.А., Ключников А.И. Адаптация маятникового... 57
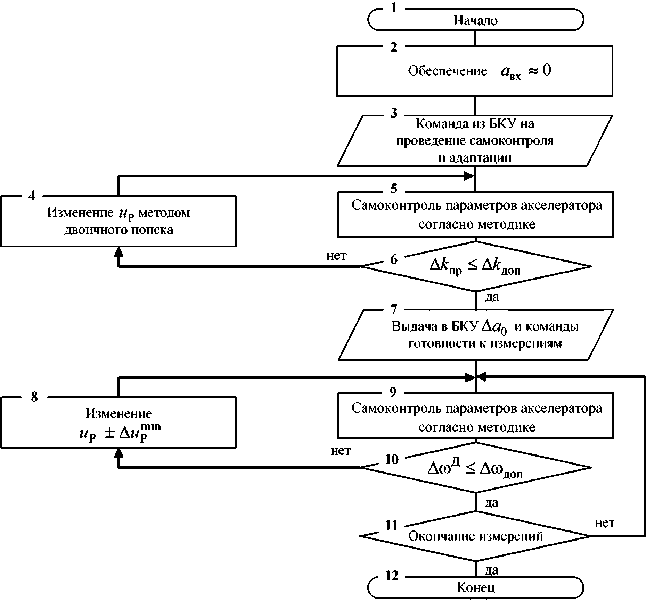
Рис. 2. Блок-схема адаптации акселерометра к возмущающим факторам в процессе эксплуатации
min
-
u р - 1 - u Р
-
u Р , = —^----, пРи k ПР > k пр
max
-
u р - u р , 1
-
u р , = —2—, пРи к Пр < k пр
-
u Р , = u Р , -1 , ПРи | k пр - k Др | ^ A k доп V | u Р , - u Р , -1 | = A u Р min
-
7. Выдача в БКУ МКА текущего смещения нуля акселерометра и команды готовности к проведению измерений.
-
8. Проведение самоконтроля параметров акселерометра в процессе измерений.
-
9. Получение результата самоконтроля: наличие отклонения текущей собственной частоты ω Д от допустимых пределов ∆ω Д ≥ ∆ω доп.
-
10. Организация на всем временном интервале измерений следящей подстройки коэффициента передачи регулирующего устройства к Р ( и Р ) путем изменения соответствующего значения u Р согласно выражению
где [ u p'in , u ”ax J - диапазон допустимых значений сигнала регулятора; А и Р min - минимальный шаг изменения значения u Р .
58 в ыпуск 1/2020
u Р j = u Р j –1 -∆ u Р minsign( ∆ k пДр). (2)
Выводы
Разработанный способ адаптации маятникового акселерометра компенсационного типа к возмущающим факторам с априорно неопределенными характеристиками обладает следующими достоинствами:
-
• позволяет в процессе проведения измерений с высокой точностью идентифицировать текущий коэффициент преобразования акселерометра и осуществить его автоматическую коррекцию;
-
• дает возможность учесть деградацию параметров составных элементов акселерометра в условиях длительного воздействия факторов космического пространства, так как, независимо от изменения параметров составных элементов акселерометра и регулирующего устройства, обеспечивает выполнение условия ∆ k пр ≤ ∆ k доп .
Список литературы Адаптация маятникового акселерометра компенсационного типа к возмущающим факторам космического пространства
- Буянкин М.П., Ватутин М.А., Трофимов И.А. Имитационная модель интеллектуального акселерометра // Труды Военно-космической академии имени А.Ф. Можайского. 2017. № 657. С. 87-96.
- ГОСТ 8.673-2009. Датчики интеллектуальные и системы измерительные интеллектуальные. М.: Стандартинформ, 2010. 12 с.
- Джашитов В.Э., Панкратов В.М. Датчики, приборы и системы авиакосмического и морского приборостроения в условиях тепловых воздействий. СПб.: ГНЦ РФ ОАО "Концерн "ЦНИИ "Электроприбор", 2005. 404 с.
- Левитин А.В. Алгоритмы. Введение в разработку и анализ. М.: Вильямс, 2006. 576 с.
- Мокров Е.А., Папко А.А. Статико-динамические акселерометры для ракетно-космической техники. Пенза: ПАИИ, 2004. 164 с.
- Нечай А.А., Борисов А.А., Борисова Ю.И. Точечный анализ данных дистанционного зондирования Земли средствами языка программирования Python // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2019. Вып. 1. С. 49-55.
- Свинарчук А.А., Калиниченко С.В., Нечай А.А. Использование графического процессора для ускорения распределенных вычислений при прогнозе экстремальных значений температуры воздуха // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2017. Вып. 4. С. 33-38.
- Свинарчук А.А., Нечай А.А. Использование квантовых вычислений при выборе управленческого решения // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2018. Вып. 2. С. 31-36.
- Туричин А.М. и др. Электрические измерения неэлектрических величин / под ред. П.В. Новицкого. Л.: Энергия, Ленинградское отд., 1975. 576 с.
- Шаймарданов А.М., Нечай А.А., Лепехин С.В. Математические модели систем автоматического управления с широтно-импульсной модуляцией // Вестник Российского нового университета. Серия "Сложные системы: модели, анализ и управление". 2019. Вып. 2. С. 27-39.
