Акселерометр с беспроводным управлением

Автор: Фартух А.В., Якимец А.Л.
Журнал: Математическая физика и компьютерное моделирование @mpcm-jvolsu
Рубрика: Радиотехника
Статья в выпуске: 1 (14), 2011 года.
Бесплатный доступ
Разработано и создано устройство для исследования параметров механических колебаний с использованием в качестве чувствительного элемента акселерометра и беспроводной передачей данных от датчика к устройству. Набор измеренных значений ускорения служит основой для восстановления закона движения исследуемого объекта.
Контроль, вибрация, измерения, механические колебания, измеритель ускорения
Короткий адрес: https://sciup.org/14968665
IDR: 14968665 | УДК: 621.31
The accelerometer with wireless control
The device for research of parameters of mechanical oscillations with is-use as an accelerometer sensitive element, and wireless data transfer from the sensor to the device is developed and created. The dial-up of the measured values of acceleration forms a basis for recovery of the law of driving of researched object.
Текст научной статьи Акселерометр с беспроводным управлением
Современные технологии требуют непрерывного контроля многих параметров технологического процесса и контроля состояния оборудования. Одними из важнейших являются параметры механического движения, в частности параметры периодических перемещений исследуемого объекта в пространстве (вибрации). Этими параметрами являются виброперемещение (амплитуда вибрации) и виброскорость (частота вибрации). Подобный контроль необходим в самых разных областях: в полупроводниковой электронике (контроль вибрации установок для выращивания кристаллов), в микроэлектронике (вибрация установок фотолитографии), в машиностроении (вибрация станков и биение деталей), в автомобильной промышленности (контроль вибрации отдельных узлов автомобилей и всего автомобиля в целом), на железнодорожном транспорте (датчики приближения поезда), в энергетике (контроль вибрации лопаток газовых турбин), в авиастроении (контроль биений турбин) и т. д.
В ходе исследований при измерении ускорений тел с применением акселерометра часто возникает проблема влияния датчика на закон движения [3]. Чтобы снизить это влияние, был разработан компактный беспроводной датчик. Данное устройство исключает помехи, связанные с влиянием кабеля на движение механической системы, снимает ограничение, накладываемое длиной кабеля, и помогает измерять параметры колебаний движущихся объектов, прокладка шнура к которым невозможна. Структурная схема установки представлена на рисунке 1.
В качестве датчика, воспринимающего вибрации, используется акселерометр ( А ), который управляется микроконтроллером (МК1). Обмен данными между контроллером и акселерометром происходит по стандартному протоколу SPI. Полученный цифровой эквивалент измеренного ускорения подается на вход приемопередающего устройства. Команды, управляющие режимом работы приемопередающим модулем, формируются МК1. Обмен данными с блоком приема и обработки сигнала происходит по радиоканалу на частоте 868 МГц, относящемуся к нелицензируемым ISM – радиочастотным диапазонам, не требующим для использования сертификации. Переданный сигнал поступает на вход блока приема и обработки сигнала, содержащий аналогичный приемопередающий модуль, управляемый микроконтроллером МК2. Второй микроконтроллер (МК3) блока приема и обработки сигналов объединен в вычислительную сеть с МК2 и осуществляет предварительную обработку полученного сигнала, обмен данными с персональным компьютером по интерфейсу USB.
Рис. 1. Структурная схема установки
А – акселерометр; МК1 – микроконтроллер датчика;
МК2 и 3 – микроконтроллеры блока приема и обработки сигнала; USB – интерфейсный блок связи с ПК
Основой измерительного блока (см. рис. 2) является акселерометр LIS302DL (DD1) [6]. Датчик имеет два диапазона измерения ускорений ±2 g и ±8 g, режим работы задает микроконтроллер ATmega8L (DD3) [7]. Для связи микроконтроллера с акселерометром используется интерфейс SPI, максимальная возможная скорость передачи данных по каналу для использованного акселерометра составляет 5 кБод. В качестве приемопередатчика в устройстве используется радиомодуль фирмы Texas Instruments CC1101EM868 (DD2) [9], сконфигурированный в режиме трансивера. Данные, предварительно подготовленные микроконтроллером, поступают в трансивер по UART-интерфейсу, управление осуществляется по линиям порта С. Максимальная возможная скорость передачи данных радиомодуля составляет 250 кБод. В качестве источника напряжения питания в схеме используется малогабаритный аккумулятор.
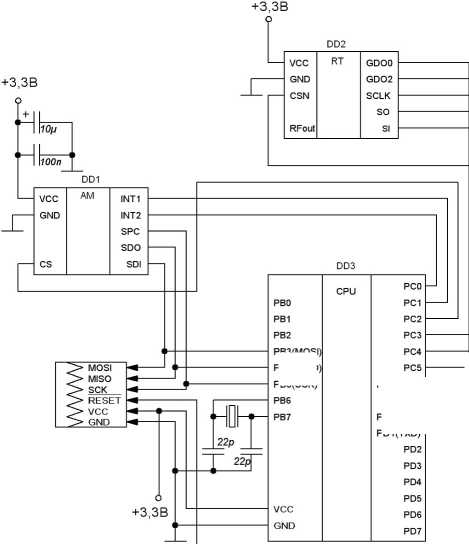
PC6(reset) —
Рис. 2. Принципиальная схема беспроводного датчика ускорения:
DD 1 – акселерометр LIS302DL; DD 2 – радиомодуль CC1101EM868; CPU 1 – микроконтроллер ATmega 8L
PB3(MOSI)
PB4(MISO) PB5(SCK)
PDO(RXD)
PD1(TXD)



Принципиальная схема блока приема и обработки сигнала представлена на рисунке 3. Прием радиосигнала осуществляет радиомодуль CC1101EM868 (DD1), управляет работой которого, по последовательному интерфейсу SPI, микроконтроллер ATmega16L (DD3) [8]. Полученные с радиомодуля данные через интерфейс UART поступают на вход DD3. Микроконтроллер выделяет из полученного сигнала измеренный цифровой эквивалент ускорения и передает его через порт C на второй микроконтроллер ATmega16L (DD4). Полученные данные DD4 перекодирует к виду, удобному для передачи по последовательному интерфейсу UART, и вставляет флаги осей координат, по которым проводились измерения ускорений. Обработанные подобным образом данные по последовательному интерфейсу поступают на вход преобразователя уровней UART-USB фирмы FTDI, FT232RL (DD2) [2; 5] для последующей обработки на персональном компьютере (ПК). Примеры принятых ПК данных приведены на рисунке 4.
РВ2
РВЗ
РВ4
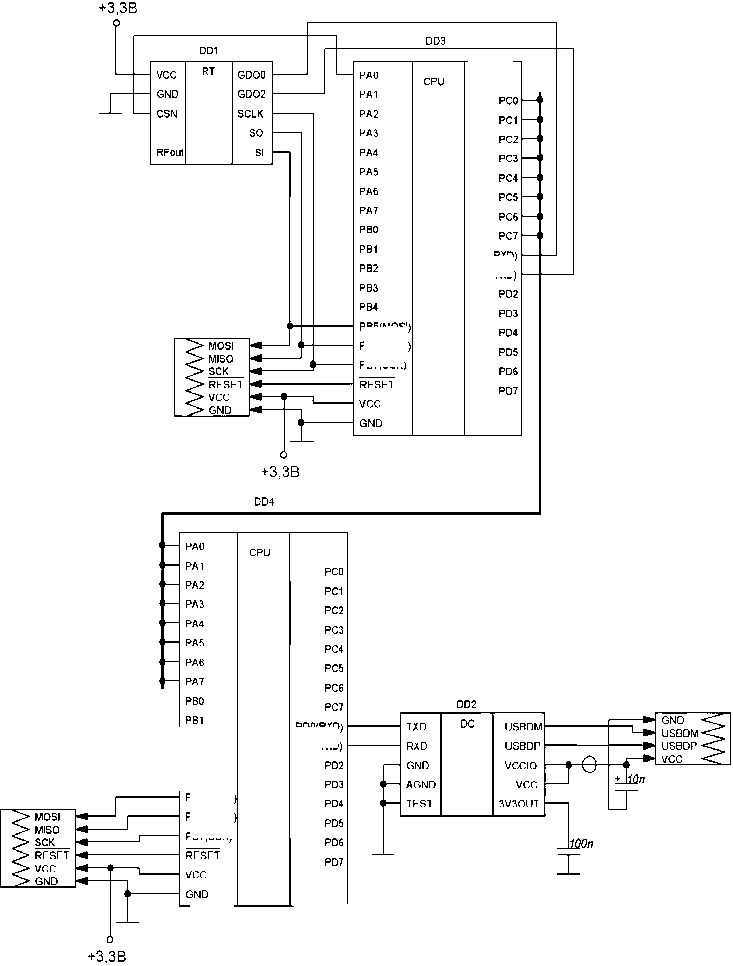
Рис. 3. Принципиальная схема блока приема и обработки информации:
CPU 1 и 2 – микроконтроллеры ATmega 16L; DD 1 – радиомодуль CC1101EM868;
DD 2 – преобразователь интерфейсов USB-UART, FT232RL
DB5(M0SI) PBG(MISO)
PB7(SCK)
PDO(RXD)
PD1(TXD)
PDO(RXD)
PD1(TXD)
PB5(MOSI)
PB6(MISO)
PB7(SCK)
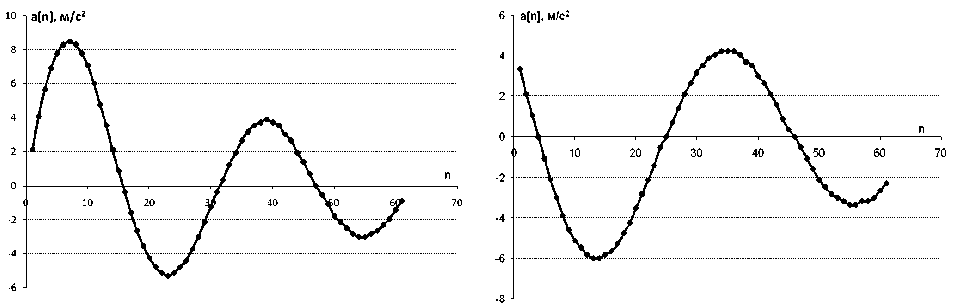
Рис. 4. Примеры принятых данных об ускорении точки колеблющихся двух упругих стержней
Персональный компьютер используется для восстановления закона движения точки по измеренным отсчетам ускорения и определения параметров колебания. Измеренные значения содержат различные шумы, в частности шумы квантования АЦП, поэтому предварительно выполняется фильтрация полученного сигнала методами цифровой обработки [1], для подавления высокочастотных гармоник. После чего осуществляется численное интегрирование полученной последовательности [4]. Смещение точки определяется следующим образом:
$ , =
a [ z — 2 ] + 2 a [ z — 1 ] + a [ z " ] A t 2
4 t, где Si – смещение точки;
a [ i ] – ускорение;
A t - шаг дискретизации по времени;
i – номер отсчета.
Восстановленный закон движения (рис. 5) используется для определения параметров колебания – амплитуды и частоты. Частота колебаний определяется как количество прохождений через ноль за единичное окно. Амплитуда находится как локальный экстремум и обновляется каждую половину периода.
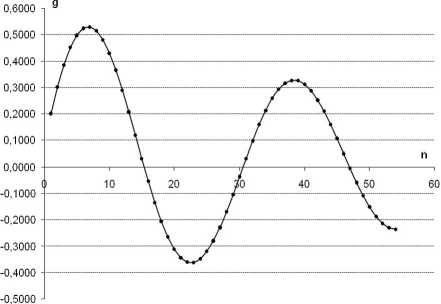
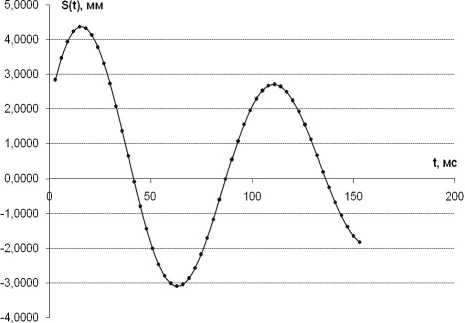
Рис. 5. Пример восстановленного закона движения ( справа ) по результатам измерения ускорений объекта ( слева )
Созданное устройство обладает следующими характеристиками: максимальная частота измеряемых колебаний 400 Гц; два диапазона измерения ускорения – ±2g и ±8g; точность измерения ускорения в диапазоне ±2g–18 mg, в диапазоне ±8g–72 mg.
Список литературы Акселерометр с беспроводным управлением
- Айфичер, Э. С. Цифровая обработка сигналов: практический подход: пер. с англ. 2-е изд./Эммануил С. Айфичер, Барии У. Джервис. -М.: Вильямс, 2004. -992 с.: ил.
- Микроконтроллеры. Разработка встраиваемых приложений. -СПб.: BHV-СПб, 2007. -304 с.
- Распопов, В. Я. Микромеханические приборы: учеб. пособие для вузов/В. Я. Распопов. -М.: Машиностроение, 2007. -400 с.: ил.
- Форсайт, Дж. Машинные методы математических вычислений: пер. с англ./Дж. Форсайт, М. Малькольм, К. Моулер -М.: Мир, 1980. -280 с.: ил.
- Щука, А. А. Функциональная электроника: учеб. для вузов/А. А. Щука. -М.: МИРЭА, 1998. -260 с.
- MEMS motion sensor 3-axis -±2g/±8g smart digital output «piccolo» accelerometer. -Mode of access: http://www.electronshik.ru/pdf/ST/LIS302DL.pdf.
- 8-bit AVR with 8K Bytes In-System Programmable Flash. -Mode of access: http://www.gaw.ru/pdf/Atmel/AVR/atmega8.pdf.
- 8-bit Microcontroller with 16K Bytes In-System Programmable Flash. -Mode of access: http://www.gaw.ru/pdf/Atmel/AVR/atmega16.pdf.
- 868/915MHz TRANSCEIVER MODULE. -Mode of access: http://www.terraelectronica.ru/pdf/EBWISE/CC1101EM868.pdf.
