Алгоритм интегрирования переменной конфигурации на основе явно-неявных схем четвертого порядка

Автор: Новиков Антон Евгеньевич, Шайдуров Владимир Викторович
Журнал: Вестник Бурятского государственного университета. Философия @vestnik-bsu
Рубрика: Функциональный анализ и дифференциальные уравнения
Статья в выпуске: 9, 2012 года.
Бесплатный доступ
Построены L-устойчивый (4,2)-метод и явная пятистадийная схема типа Рунге-Кутты четвертого порядка точности. Создан алгоритм интегрирования переменного шага, в котором выбор эффективной численной схемы осуществляется на каждом шаге с применением неравенства для контроля устойчивости. Приведены результаты расчетов, подтверждающие эффективность построенного алгоритма.
Жесткие задачи, явный и неявный методы, контроль точности и устойчивости
Короткий адрес: https://sciup.org/148181252
IDR: 148181252 | УДК: 519.622
An integration algorithm of variable configuration based on explicit-implicit schemes of 4th order of accuracy
An L-stable (4,2)-method of 4th order of accuracy and an explicit Runge-Kutta scheme of 4th order of accuracy are constructed. An integration algorithm of variable step size is formulated. The most effective numerical scheme is chosen for each step by means of stability control. The numerical results which confirm the effectiveness of the algorithm are given.
Текст научной статьи Алгоритм интегрирования переменной конфигурации на основе явно-неявных схем четвертого порядка
Во многих важных приложениях возникает проблема численного решения задачи Коши для обыкновенных дифференциальных уравнений. В современных методах решения жестких задач при вычислении стадий применяется /.//-разложение матрицы Якоби. В случае достаточно большой размерности исходной системы быстродействие алгоритма интегрирования фактически полностью определяется временем декомпозиции этой матрицы. Для повышения эффективности расчетов в ряде алгоритмов используется замораживание матрицы Якоби, то есть применение одной матрицы на нескольких шагах интегрирования [1]. Наиболее успешно этот подход применяется в многошаговых методах [2]. Не вызывает эта проблема особых трудностей и при построении алгоритмов интегрирования на основе других численных схем, если в них стадии вычисляются с участием матрицы Якоби в некотором итерационном процессе. В алгоритмах интегрирования на основе известных безытерационных численных схем, к которым относятся методы типа Розенброка [3] и их различные модификации [1], проблема замораживания более трудная. Следует отметить, что с точки зрения реализации безытерационные методы существенно проще алгоритмов на основе численных формул, в которых стадии вычисляются с применением итераций. Некоторым аналогом замораживания матрицы Якоби является применение в расчетах алгоритмов интегрирования на основе явных и А-устойчивых методов с автоматическим выбором численной схемы. В этом случае эффективность алгоритма может быть повышена за счет расчета переходных участков явным методом [4]. В качестве критерия выбора эффективной численной формулы естественно применять неравенство для контроля устойчивости [5].
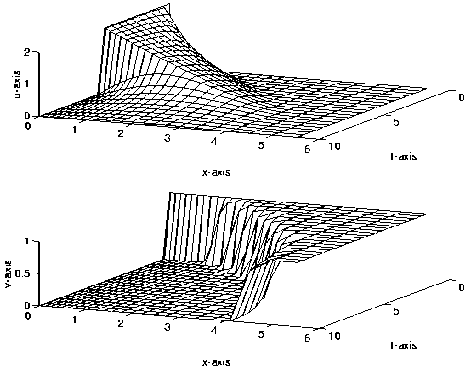
Здесь на основе L-устойчивого (4,2)-метода и схемы Мерсона четвертого порядка точности построен алгоритм переменной структуры. Приведены результаты расчетов задачи проникновения помеченных радиоактивной меткой антител в пораженную опухолью ткань живого организма.
1. Исследование (4,2)-метода
Рассмотрим задачу Коши вида
У = ДуУ УШ = УоДо ^^k, W где у и f — вещественные /V-мерные вектор-функции, / — независимая переменная. Для решения задачи (1) рассмотрим численную формулу [6]
УпА=Уп*РУкАЛ--*РУк© Dn=E-ahf„,
Dnkx = hf
'Работа выполнена при финансовой поддержке РФФИ (проекты 11-01-00106 и 11-01-00224)
Опкз = М<.Уп + Рз 1^1 + Рз2к2 ) + «32^2 , Dnk4 = к3 + «42^2 , где И - шаг интегрирования, а,р,, Ру и «у — числовые коэффициенты, ку 1<4, — стадии метода, Е — единичная матрица, fn=df/dy - матрица Якоби задачи (1). Подставим разложения к, в виде рядов Тейлора в первую формулу (2). Полагая уп= y(t^ и сравнивая полученное представление с рядом Тейлора для точного решения, запишем условия четвертого порядка точности
-
1) А + Т>2 + 0 + «32)Л + 0 + «32 + «42М =1,
-
2) ару+2ар2+(а + Рзу+Рз2+Заа32)рз + +(2а + Рзу + Р32 +4а«з2 + Заад2)Р4 =0-5 , 2 2 2 2
-
3) а рууЗа Р2+(а + 2а рз । + Зарз2 + 6а «32)^3 +
+(3а уЗарзу у4арз2 +10а «32 + 6а «42)^4 = 1/6 ,
-
4) а3ру + ^Р2 + (а3 + За^ Р3 । + 6а2 Р32 + +10а^аз2)рз +(4а3 уба^Рзу +10а2 Р32 +
20а3«з2 + 10а3«42) Р4 =1/24,
-
5) (Z%1+/%2)2(РЗ+Р4) = 1/3,
-
6) а(Рзу + Р32ХР31 ^РзУХРЗ +^4)=1/8^
-
7) а(/%1+/%2)2(0.5№+^4) = 1/24,
-
8) (/%1+^2)3(№+^4) = 1/4.
Применяя метод (2) для решения тестовой задачи
У = ^, уф) = у0Л>0,
имеем условие L -устойчивости численной формулы (2) вида
а(а - рг) + (/З31 -а)р3 = 0.
Исследуя совместность этого соотношения и (3), запишем
76а2 - 29а + 3
Р1=-------3----, Р2 =
27а2
146а2 + 89а-12
«32 =
4-16а л
Р4 — ’ Р31 =
27 а
-54а2 + 57а-12
27а2
48а-9 32а
32а-4
РЗ =------ 27а
9-24а
32а ’
8а-32а2
, «42 =
-864а3 + 828а2 -288а+ 36
а(4-16а)2
где а определяется из необходимого условия L -устойчивости
24а4 - 96а3 + 72а2 - 16а +1 = 0 .
Данное уравнение имеет четыре вещественных корня ау =0.10643879214266, а2 =0.22042841025921, а3 =0.57281606248213, а4 =3.10031673511599.
Для расчетов рекомендуется а=0.57281606248213, потому что в этом случае схема (2) дополнительно является Л-устойчивой.
Для контроля точности вычислений метода (2) четвертого порядка будем применять метод третьего порядка вида
Уп+и =Уп + ^1 *Ь2к2 + М<3 + Ь4к5 , где 1),к==кл. a кь 1<3, определены в (2). Нетрудно видеть, что требования третьего порядка имеют вид by + Z>2 + (1 + «32)^3 + О + «32 + «42)^4 -1, aby +2ab2 + (а + рзу + Р32 + 3а«з2)^з + (За + Рзу + Р32 +5а«з2 +4^42)64 = 1/2 , а ЬууЗа b2+(a + 20/^1+30/^2+60 «32)63 +
7 7 7
+(6а + 4аДз| +5а/?з2 + 15а «32 + 10а «42)64 =1/6, (/%1+/%2)2(*3+*4) = 1/3, где коэффициенты а, /?зь Д32. а32 и а42 заданы в (4). Данная система линейна относительно параметров bh 1<4. При применении коэффициентов (4), имеем by = 1.203100567018353, 62 =-6.552116304144386ЛО"1,
63 = 7.115271884598151-10-1, 64 =-1.189345958672225 Л0"1.
Оценку максимального собственного числа v„0=6|2„max| матрицы Якоби системы (1), необходимую для перехода на явную формулу, оценим через ее норму по формуле
Л/.О =11 5/ / Sy ||= тах^,^ ^у=1| dft (уп WyjV
2. Контроль точности и устойчивости метода Мерсона
Одним из самых эффективных явных методов типа Рунге-Кутта четвертого порядка точности является метод Мерсона [7]
1, h
Уп+1 - Уп +"7^1 + Т^4 +7^5 ,
6 36
к\=М<Уп) - к2=кДУп+^кУЬ k3^hf(yn+7kl+7k2^(5)
3 66
1 3 1
64 = ШУп + 7^1 + ~кз) ■ к5 = М^п + 7^1 ОО 2
Пятое вычисление функции / не дает увеличение порядка до пятого, но позволяет расширить интервал устойчивости до 3.5 и оценить величину локальной ошибки 6„4 с помощью 6г, то есть
<5^4 = (2^з - 9^з + 864 - 65 ) / 30 .
Для контроля точности будем применять неравенство ||6„4||<5г5 4, которое получено с учетом накопления глобальной ошибки из локальных ошибок [5]. Несмотря на то, что обоснование неравенства проведено на линейном уравнении, оно с достаточно высокой надежностью использовалось для решения нелинейных задач.
Теперь построим неравенство для контроля устойчивости. Применяя к разности 63—62 формулу Тейлора с остаточным членом в форме Лагранжа первого порядка, имеем k3 "к2 = hYQJW /с№2 "Ч'Мб, где вектор рп вычислен в некоторой окрестности решения y(f„). Учитывая, что 62-61=62/Х/3 + О(63), для контроля устойчивости (5) можно использовать неравенство v„ 4 = 6 max | (63 -62)/ / (62 -ку\ |< 3.5, 1<У где числу 3.5 равна длина интервала устойчивости. Отметим, что по мнимой оси область устойчивости также ограничена числом 3.5 (рис. 1). Введем обозначения е„4=6п4/5. Тогда для контроля точности схемы (5) можно применять неравенство спдАг'Д. а для контроля устойчивости следующее - v„4<3.5.
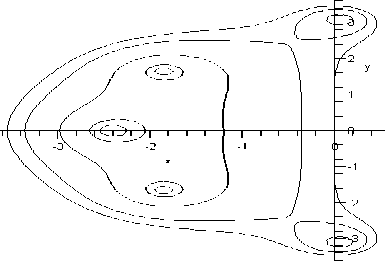
Рис. 1. Область устойчивости метода (5)
Так как оценка максимального собственного числа v„4=/7|2„ тах| является грубой, то контроль устойчивости используется как ограничитель на размер шага интегрирования. В результате прогнозируемый шаг
h,^
вычисляется следующим образом. Новый шаг
hac
по точности определим по формуле
hac=q\hn,
где
hn
есть последний успешный шаг, a ^i, учитывая соотношение
en^=OQi5^,
задается уравнением ^5ie„4
Ип+^ = тах[/7й,тш(/7яс ,hst)A •
Данная формула стабилизирует шаг на участке установления решения, где определяющую роль играет устойчивость.
3. Алгоритм интегрирования
На основе построенных методов легко сформулировать алгоритм переменного шага, в котором на каждом шаге выбирается наиболее эффективная численная схема. Расчеты всегда начинаются явным методом потому, что в нем не используется матрица Якоби. Нарушение неравенства v„4<3.5 вызывает переход на L -устойчивую схему. Передача управления явным методам происходит в случае выполнения неравенства v„o<3.5, где оценка v„o вычисляется через норму матрицы Якоби. Норма ||^|| в неравенствах для контроля точности вычисляется по формуле
||£||= шах {|§ \К\^п |+г)}, (6)
l
семейство преобразований Мебиуса С х/(х с). с>0. Это замена переменных преобразует ST в прямоугольник {(£ ty 0<^<1, 0 / 7}. Через переменную С задача (7) переписывается в виде дм д7
(^-1)4 д2м 2(^-1)3 дм , dv , с1 д^2 с1 9С 5t
с начальными w(£0)=0, v(^,O)=vo, f>0 и граничными м(0, к)=Ф(уу дм(1,7)/д<^=0, 0 и j _ । — 2г/ j + г/у+^ (a^)2 1<7<^. Значения м0 и uN^ получены из граничных условий, они имеют вид м0=Ф(7), у=(мь vb м2, v2,..., mn, vN)7 и 77=20, эта задача имеет вид г/д^+i—г/д^. Полагая y'=f(t,y), y(O)=g, y^R2N, 0<7<20, где N- параметр, а функция/определяется формулами №У +1 " У2]-3 E2j-3 " 2У2]-1 + +1 J2 j-I=a j--------+ Pj-----------7------- 2a^ j -^2 j-V2 j, /2/ = "кУ2 ]У2/-1, где g=(O,vo,O,vo,... ,O,vo)7, a^TXy E^-Xf of fipyj-MfXf с\ M=\JN, 1EJEN, у^)=Ф^У уж+1= Уж-ъ Функция Ф^=2 при О<7<5 и Ф^=0 при 5<7<20, то есть Ф0) имеет разрыв первого рода в точке 7=5. Согласно [8] подходящими значениями для параметров k, v0 и с являются 7 100. v0=l и с=4. Расчеты проводились при 7V=400, то есть система (9) состоит из 800 уравнений. Задача о нахождении разрыва функции Ф(1) при 7=5 возлагалась на алгоритм управления шагом. Решение задачи (9) приведено на рис. 2. Рис. 2. Решение задачи (7) Расчеты проводились с двойной точностью. Параметр г в формуле (6) выбирался таким обозом, чтобы фактическая точность вычисления решения совпадала с задаваемой точностью. Сравнение проводилось с приближенным решением, которое получено при задаваемой точности вычислений е=10 9 различными методами. Матрица Якоби вычислялась численно. В табл. 1 приведены результаты расчетов при различных значениях задаваемой точности вычислений е. Вычислительные затраты приведены в форме ifljfy где через if и ij обозначены соответственно число вычислений правой части и декомпозиций матрицы Якоби на интервале интегрирования. В табл. 1 используются обозначения: RK4 - метод Мерсона, RK4st - метод Мерсона с контролем устойчивости, МК4 - L-устойчивый метод, RKMK4 - алгоритм с автоматическим выбором численной схемы. Таблица 1 Результаты расчетов Метод / e RK4 RK4st MK4 RKMK4 10 2 1 017 921 883 561 39 560(49) 35 286(34) 10 3 1 018 024 886 914 62 918(78) 44 923(46) 10 4 1 018 177 889 604 76 717(95) 66 845(74) 10' 1 018 701 882 836 92 165(114) 83 984(86) 10 ” 1 019 268 916 280 103 687(128) 96 205(99) Из сравнения результатов расчетов RK4 и RK4st следует, что на данной задаче контроль устойчивости приводит к сокращению вычислительных затрат более чем на 10%. Это является следствием устранений некоторых повторных вычислений решения, возникающих за счет неустойчивости численной схемы. На других задачах преимущество RK4st перед RK4 может достигать 50% [5]. Из сравнения результатов расчетов МК4 и RKMK4 следует сокращение числа декомпозиций матрицы Якоби, что является следствием расчета некоторых переходных участков по явной численной формуле. Заключение В RKMK4 с помощью признака можно задавать различные режимы расчета: 1) явным методом с контролем или без контроля устойчивости; 2) L-устойчивым методом с аналитической или численной матрицей Якоби; 3) с автоматическим выбором численной схемы. Все это позволяет применять данный алгоритм для решения как жестких, так и нежестких задач. При расчетах с автоматическим выбором численной схемы вопрос о том, является ли задача жесткой или нет, перекладывается на алгоритм интегрирования.