Алгоритм на основе сэмплирования аэрозольных неоднородностей в задаче измерения скорости ветра

Автор: Филимонов Павел Анатольевич, Белов Михаил Леонидович, Иванов Сергей Евгеньевич, Городничев Виктор Александрович, Федотов Юрий Викторович
Журнал: Компьютерная оптика @computer-optics
Рубрика: Обработка изображений, распознавание образов
Статья в выпуске: 5 т.44, 2020 года.
Бесплатный доступ
Разработан алгоритм на основе сэмплирования аэрозольных неоднородностей для обработки изображений в задаче лидарного измерения скорости ветра в атмосфере. Проверка разработанного алгоритма производилась с использованием синтезированных лидарных сигналов и на данных натурных измерений. Алгоритм обработки аэрозольных полей в координатах «дальность - время» позволяет существенно уменьшить погрешности лидарного времяпролётного метода измерения скорости ветра по сравнению с корреляционными методами измерения.
Цифровая обработка оптических сигналов, цифровая обработка изображений, лидар, алгоритмы
Короткий адрес: https://sciup.org/140250051
IDR: 140250051 | DOI: 10.18287/2412-6179-CO-708
An algorithm for measuring wind speed based on sampling aerosol inhomogeneities
A digital image processing algorithm based on sampling aerosol inhomogeneities was developed in the applied problem of laser remote sensing for measuring the velocity of wind. Tests of the developed algorithm were conducted for synthetic data from numerical simulations and data measured by a lidar. The algorithm developed performs processing of the field of aerosol backscattering coefficient in “Range-Time” coordinates and sufficiently increases the measurement accuracy in comparison with correlation methods.
Текст научной статьи Алгоритм на основе сэмплирования аэрозольных неоднородностей в задаче измерения скорости ветра
На данный момент существует ряд важных практических приложений дистанционного и оперативного мониторинга скорости атмосферного ветра: метеорологическое обеспечение взлёта и посадки летательных аппаратов, мониторинг ветровой обстановки, контроль аэрозольных загрязнений, научные исследования аэрозольных полей и увеличение эффективности работы ветрогенераторов. Каждая из них предъявляет высокие требования к точности и быстродействию измерений. Необходимым требованиям удовлетворяют оптические методы измерения, в частности лидарные. Большинство лидарных методов измерения скорости и направления ветра основаны на зондировании атмосферного аэрозоля, который полностью увлекается воздушными потоками [1–9].
Лидарные методы для задач измерения скорости ветра можно условно поделить на две группы: доплеровские и времяпролётные [4]. Наиболее распространённым является доплеровский метод, позволяющий определять с высокой точностью скорость и направление ветра. Его недостатками являются большое время обновления данных и необходимость пространственного осреднения с использованием конического сканирования атмосферы по азимуту с большим углом места, а значит, и невозможность работы в условиях сложного рельефа местности [7].
Времяпролётные методы измерений включают ряд следующих: корреляционный, структурный и трассерная визуалиция потоков. Их преимуществами по сравнению с доплеровскими являются большое быстродействие за счет отсутствия необходимости пространственного сканирования атмосферы и меньшая себестоимость приборов. Однако по сравнению с до- плеровскими методами они обладают худшей точностью измерений скорости ветра, поэтому перспективно развитие времяпролётных методов с целью увеличения точности измерений.
Одним из направлений улучшения качества время-пролётных методов является улучшение методов обработки лидарных сигналов и изображений. Лидарный сигнал существенно зависит от состояния атмосферы и является нестационарным по дальности зондирования и времени измерения. Получение полезной информации из такого сигнала для определения скорости и направления ветра с приемлемой точностью будет сильно зависеть от качества методов цифровой обработки. Для решения задачи выделения полезного сигнала в таких случаях подходят алгоритмы с адаптивной фильтрацией, вейвлет-обработка и др. Отметим, что наиболее перспективным методом обработки является использование нейронных сетей, которые при наличии достаточного количества данных показывают наилучшие результаты по сравнению с классическими методами цифровой обработки [10–14].
Статья посвящена разработке алгоритма обработки изображений в координатах «дальность – время» для задачи измерения скорости и направления ветра на основе времяпролётного метода и апробации разработанного алгоритма на синтезированных и экспериментально полученных аэрозольных полях.
Математическая модель лидарного сигнала и перемещения аэрозольных неоднородностей под действием ветра
Времяпролётные методы измерения основаны на регистрации перемещения аэрозольных частиц и аэрозольных неоднородностей атмосферы – допускается, что аэрозольные частицы полностью увлекают- ся ветром и их скорость совпадает со скоростью ветра. В приземном слое атмосферы время жизни аэрозольных неоднородностей составляет от единиц до десятков секунд, а их размеры – от одного метра до десяти метров и более, причем с увеличением высоты над земной поверхностью размер неоднородностей увеличивается. При дальнейшем рассмотрении неоднородностей принимаются следующие типовые допущения: неоднородности изотропны и время их жизни больше времени измерения. При лазерном зондировании для измерения скорости и направления ветра используют коэффициент обратного аэрозольного рассеяния, в вариациях величины которого проявляются неоднородности [9].
При наличии ветра неоднородность перемещается в пространстве, и её перенос r i за время измерения Δ t можно оценить через среднюю за время измерения скорость ветра V :
r i = V Δ t .
Для моностатической схемы измерения среднюю за время измерения скорость ветра можно представить в виде (рис. 1):
-
V = V cos a ,
-
V ⊥ = V sin α ,
где α – угол между направлением зондирования (оптическо й осью лидара) и направлением атмосферного ветра, V , V L - продольная и поперечная (относительно направления зондирования) компоненты скорости ветра.

Рис. 1. Схема измерения скорости ветра
Аналогично можно представить перенос аэрозольной неоднородности:
-
r = r cos a ,
-
r ⊥ = r sin α .
где r , r - перенос неоднородности в продольном и поперечном (относительно направления зондирования) направлении.
Регистрируемый лидарный сигнал в общем случае имеет вид [4]:
U ( z ) = K ( P ( z )) ■ P ( z ) = K ■ P ( z ),
P(z)=1 A(z)β(z)T(z), z2
где z – расстояние от лидара до зондируемого объема атмосферы, K – передаточная функция электронного тракта, P ( z ) – мощность обратно рассеянного сигнала, A ( z ) – аппаратная функция лидара, T ( z ) – коэффициент пропускания атмосферы, β ( z ) – коэффициент обратного рассеяния атмосферы.
Аэрозольные неоднородности проявляются в виде флуктуаций коэффициента обратного аэрозольного рассеяния. В соответствии с этим можно записать:
β(z) = β(z) + β(z), где β(z), β(z) – средняя по ансамблю реализаций и флуктуационная компоненты соответственно.
Регистрируемый лидарный сигнал без предварительной калибровки не позволяет найти абсолютную величину β ( z ), но позволяет определить относительные флуктуации коэффициента обратного рассеяния:
дв = в = P i ( z ) - P ( z ) = U i ( z ) - U ( z )
i β P(z) U(z) , где Pi (z),Ui (z) – регистрируемая мощность и сигнал реализации в момент времени ti, P(z), U(z) – усреднённый по ансамблю реализаций профиль мощности и регистрируемого сигнала.
Каждая из регистрируемых реализаций в момент времени t i , i= 1 … N позволяет получить относительный коэффициент обратного аэрозольного рассеяния Δβ i ( z ), а последовательность таких реализаций за время измерения Δ t формирует поле относительных флуктуаций аэрозольных неоднородностей Δ i β j , j = 1 … M , где M – размер регистрируемой реализации. Полученное поле Δ β в координатах «дальность – время» содержит информацию о переносе неоднородностей и позволяет измерить продольную и поперечную компоненту скорости ветра. При обработке поля Δ β можно рассматривать как изображение с целью применения методов цифровой фильтрации, основанных на локальных характеристиках. Обработка сигналов и анализ неоднородностей производится при допущении, что в локальной области характеристики сигнала можно считать стационарными по дальности и времени. Основные этапы измерения скорости ветра представлены на рис. 2.
Этап формирования поля флуктуаций Δ β тестировался предварительно на синтезированных данных, а затем с использованием данных натурных измерений. Синтезированные данные формировались с использованием метода формирующего фильтра [15].
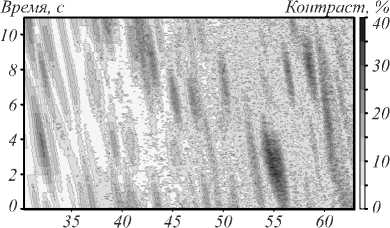
При моделировании использовались 20 вариантов пространственных полей флуктуаций с известной корреляционной характеристикой размером 300×300 м. Для моделирования были использованы скорости ветра от 0 до 15 м / с с шагом 0,1 м / с с различными направлениями относительно лазерного луча. Ширина корреляционной функции составляла величины от 0,5 до 10 м с шагом 0,5 м. При моделировании эхо-сигнала добавлялась флуктуация мощности лазерного импульса с СКО 1 % и белый шум, моделирующий нестационарность сигнала по дальности. Пример смоделированного поля в координатах «дальность – время» представлен на рис. 3, где «дальность» – дальность от лидара до объема атмосферы, а «время» – время измерения.
Время измерения
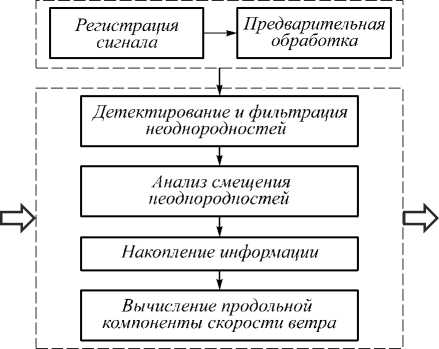
Рис. 2. Основные этапы вычисления продольной компоненты скорости ветра
Дальность, м
Рис. 3. Пример синтезированного поля аэрозольных неоднородностей: V ⊥ = 2,0 м / c, V || = –3,0 м / с
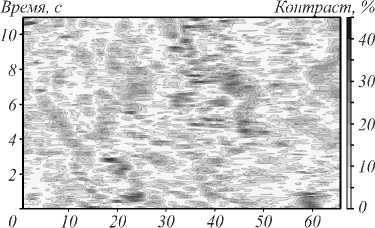
Натурные данные измерений получены с использованием лидара [16]. Пример поля неоднородностей Δ β в координатах «дальность – время», полученного из натурных данных, представлен на рис. 4.
Диапазон дальности, .м
Рис. 4. Пример поля аэрозольных неоднородностей: V ⊥ = 2,3 м / c, V || = 1,0 м / с
Цель блока детектирования и фильтрации неоднородностей – выделение на изображении наиболее контрастных неоднородностей. В качестве алгоритма выделения неоднородностей использовался алгоритм сегментации [16]. Пример выделения наиболее контрастных неоднородностей представлен на рис. 5.
Алгоритм измерения скорости ветра
Задача измерения скорости ветра с использованием предложенной схемы измерения состоит из двух подзадач – измерения продольной и поперечной относительно направления зондирования компонент скорости ветра.
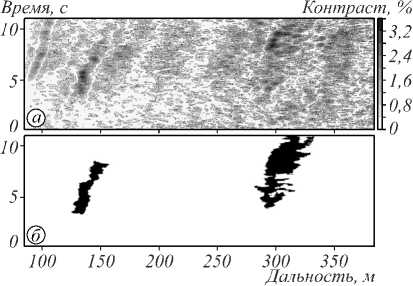
Рис. 5. Результат применения алгоритма сегментации аэрозольных неоднородностей: поле после предварительной обработки (а); поле после блока детектирования и фильтрации неоднородностей (б)
Наиболее простой схемой измерения одновременно и продольной, и поперечной скорости ветра является двухлучевая схема (рис. 1). Измерение скорости ветра происходит на основе анализа взаимного смещения неоднородностей в канале 1 и канале 2 (в блоке анализа смещения неоднородностей на рис. 2).
Исходными данными для работы блока анализа смещения неоднородностей являются поля флуктуаций Δ b в координатах «дальность – время», зарегистрированные в канале 1 и 2 (рис. 6).
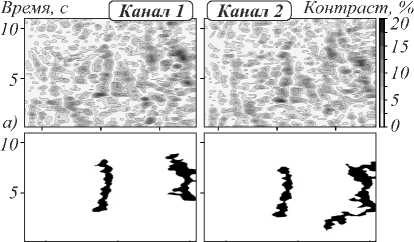
150 200
Дальность, м
100 150 200 100
б) Дальность, м
Рис. 6. Результат применения алгоритма сегментации аэрозольных неоднородностей для двух каналов: поле после предварительной обработки (а); поле после блока детектирования и фильтрации неоднородностей (б)
Рассмотрим процесс перемещения аэрозольных неоднородностей в продольном направлении. В течение времени измерения неоднородность переносится через лидарный луч под действием ветра, и регистрируемый лидарный сигнал Pi (z) содержит профиль перемещающихся неоднородностей. При регистрации сигнала можно считать, что центру неоднородности соответствует максимальное значение флуктуации в реализации Δiβ , то есть пик в локальном срезе сигнала. Таким образом, регистрация последовательности пиков Δiβ фиксирует положение каждой из неоднородностей в момент времени ti, а значит, содержит информацию о перемещении в продольном направлении. Существует ряд подходов к детектированию пиков в сигнале, таких как использование корреляционного анализа, цифровой фильтрации, пороговой обработки сигнала и распознавание образов [13, 17]. В предложенном алгоритме используется алгоритм детектирования пиков на основе вейвлет-преобразования сигналов [18].
Представим осреднённую за время и диапазон дальности измерения продольную компоненту скорости ветра как среднюю скорость перемещения аэрозольных неоднородностей:
V = 12 V,
KK где K - общее число неоднородностей, Vk - продольная скорость перемещения неоднородности:
-
V I = ^
k A t ’ где Ark - перенос неоднородности между начальным и конечным моментом измерения.
Множество факторов, влияющих на точность измерений: турбулентность, шумы электронного тракта, джиттер лазерного импульса – ухудшают качество проводимых измерений. Чтобы использовать накопленную информацию о перемещении и получить осреднённый устойчивый результат, воспользуемся функционалом для средней ошибки перемещения неоднородностей:
F (V " ) = -1 2 f V " ), (1)
KK где fk(V||) - функция ошибки определения скорости ветра для неоднородности k, K – количество неоднородностей. Минимизация функционала F(V ||) позволяет определить продольную компоненту скорости:
-
V 11 = arg min F(V 11),
-
V II е В
где V 11 - полученное значение скорости ветра.
При нахождении значения продольной компоненты скорости ветра вид функции ошибки для каждой из неоднородностей может учитывать структуру самой неоднородности и включать более детальную информацию о накопленных данных. В простейшей версии алгоритма реализована неравномерность отношения сигнал/шум для пика неоднородности во время измерения. Запишем для каждой неоднородности функцию ошибки с учётом сэмплирования пиковых значений коэффициента флуктуаций (рис. 7):
f k (V " ) = 2 w k (V " t s — r s ) 2 ,
s где s – номер сэмпла для неоднородности, wsk – вес для каждого сэмпла, rs – положение координаты неоднородности в момент времени ts. Веса для каждой компоненты в функции ошибки прямо пропорциональны от максимальной амплитуды флуктуаций в сэмпле и нормировались на L2-норму:
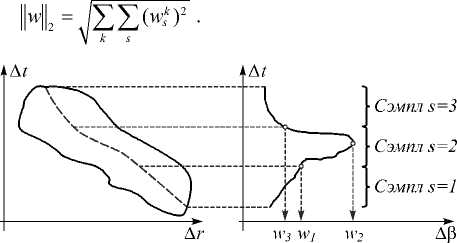
Рис. 7. Сэмплирование неоднородности для формирования функционала
В отличие от продольной компоненты, измерение поперечной компоненты скорости ветра является более сложной задачей. Классическим решением является сканирование в секторе пространства [11]. Однако без сканирования также возможно измерение поперечной относительно луча скорости ветра: использование двух и более лучевых схем, переключение одного луча в малом угле [5].
Рассмотрим двухлучевую схему измерения, когда лучи находятся под малым углом у друг к другу. Поле неоднородностей, полученное для одного луча, позволяет оценить поперечную компоненту по абсолютному значению без учета направления относительно луча [19]. Большая точность может быть получена посредством анализа полей неоднородностей в двух лучах. При этом возможны 2 сценария детектирования неоднородности во время измерения: неоднородность зарегистрирована в одном луче, но не зарегистрирована в другом, и неоднородность зарегистрирована в обоих лучах.
При наличии неоднородности в обоих лучах необходимо установить соответствие для всей области проявления неоднородности. В режиме реального времени при обнаружении неоднородности в одном из лучей сопоставление её более надёжно в случае прогнозирования движения и ожидаемого положения в другом луче, при этом качество детектирования будет зависеть от величины продольной и поперечной компоненты скорости ветра (рис. 8). Для прогнозирования могут быть использованы, например, регрессионные модели или алгоритмы экстраполяции [13, 17].
Допуская, что расстояние между лучами в локальной области одинаковое, в первом сценарии для Vk1 можно наложить условие:
V^< b^, k A t где b(z) – расстояние между лучами на дальности z, где была зарегистрирована неоднородность. Для определения поперечной скорости ветра воспользуемся функционалом, аналогичным (1):
F(V⊥) = 1 ∑fk(V⊥), KK fk(V⊥)=∑ws(x2 -(b(z)+V⊥τs)), s где s – номер сэмпла при разбиении, ws – весовой коэффициент, x2 – положение неоднородности во 2-м луче, тs - разница по времени для одной области неоднородности в разных лучах.
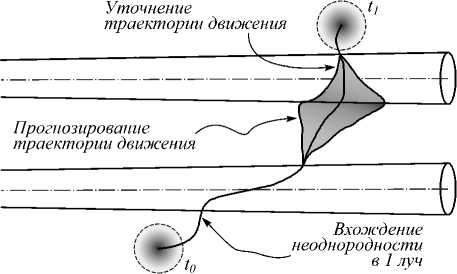
Рис. 8. Определение поперечной компоненты скорости ветра
Для ускорения сходимости функционала можно воспользоваться оценкой компонент скорости ветра на основе размеров связанной области:
уи =ly ^ii start = ∑ k ,
Kk v1 =—У к1
start = ∑ k ,
Kk где Vk, Vk1 - оценка продольной и поперечной скорости ветра с помощью алгоритма [19] для неоднородности k, знак поперечной скорости определялся номером канала, в котором проявлялась неоднородность.
Объединим измерение продольной и поперечной компоненты. Для заданного времени измерения Δ t , количества зарегистрированных реализаций сигнала N и заданной дальности зондирования, определяемого количеством отсчетов сигнала M , получены срезы поля неоднородностей в каждом из каналов Δ β1 и Δ β2, дополнительно к ним применен алгоритм сегментации неоднородностей:
-
1) для Δβ i 1 и Δβ i 2 вычислить положение и значение амплитуды пиков для каждой неоднородности;
-
2) установить соответствие неоднородностей между полями для разных каналов;
-
3) сформировать компоненты ошибки для продольной компоненты;
-
4) сформировать компоненты ошибки для измерения поперечной компоненты, если неоднородность принадлежит множеству { K ⊥ } неоднородностей, зарегистрированных в 2 лучах;
-
5) вычислить стартовое значение параметров;
-
6) оптимизировать функционал.
В соответствии с этим можно записать:
for i=1…N:
for k=1…K:
[pos,amplitude]i,k ← find peaks(Δβi) fk(V " ) < build_parallel_error M / ?, s,k) F (V , v ) < F(V " ,V X ) + fk(V " )
V start ← ( V start + V k )/2
if k ∈ { K ⊥ }:
fk(V ⊥ ) ← build_trans_error( Δ β ,s,k) F(V,V ⊥ ) ← F(V,V ⊥ ) + f k (V ⊥ )
Vs™ < ( Vs™ + ^> 1 )/2
V1 ,V 1 < argmin F(VII,V 1 )
Для анализа работы предложенного алгоритма проведено математическое моделирование с использованием синтезированных полей в координатах «дальность – время» и получены результаты обработки данных натурных измерений. Для сравнения выбраны классический корреляционный алгоритм измерения [9], корреляционный метод с сегментацией неоднородностей [15] и разработанный алгоритм на основе сэмплирования. При сравнении оценивалась средняя абсолютная погрешность (по отношению к показаниям анеморумбометра) для определения продольной компоненты Δ V ||, поперечной компоненты Δ V ⊥ . Результаты сравнения представлены в табл. 1.
Табл. 1. Сравнение результатов измерения
|
Корр. алг. |
Сегментация + корр. алг. |
Сегментация + алгоритм сэмпл. |
|
|
Синтезированные данные |
|||
|
Δ V || , м/c |
0,23 |
0,19 |
0,10 |
|
Δ V ⊥ , м/c |
0,37 |
0,33 |
0,26 |
|
Натурные данные |
|||
|
Δ V || , м/c |
0,38 |
0,30 |
0,15 |
|
Δ V ⊥ , м/c |
0,60 |
0,47 |
0,33 |
Заключение
Разработан алгоритм на основе сэмплирования аэрозольных неоднородностей для обработки изображений в задаче измерения скорости ветра для лидар-ного зондирования атмосферы. Разработанный алгоритм протестирован на синтетических данных, полученных с различными корреляционными характеристиками, и натурных данных измерений. Показано, что алгоритм обработки аэрозольных полей в координатах «дальность – время» позволяет существенно уменьшить погрешности лидарного времяпролётного метода измерения скорости ветра по сравнению с корреляционными методами измерения.
Список литературы Алгоритм на основе сэмплирования аэрозольных неоднородностей в задаче измерения скорости ветра
- Annoni, J. Analysis of control-oriented wake modeling tools using lidar field results / J. Annoni, P. Fleming, A. Scholbrock, J. Roadman, S. Dana, C. Adcock, F. Porte-Agel, S. Raach, F. Haizmann, D. Schlipf // Wind Energy Science. - 2018. - Vol. 3, Issue 2. - P. 819-831. - DOI: 10.5194/wes-3-819-2018
- Zhan, L. LiDAR measurements for an onshore wind farm: Wake variability for different incoming wind speeds and atmospheric stability regimes / L. Zhan, S. Letizia, G.V. Iungo // Wind Energy. - 2020. - Vol. 23, Issue 3. P. 501-527. - DOI: 10.1002/we.2430
- Kim, M.-H. The CALIPSO version 4 automated aerosol classification and lidar ratio selection algorithm / M.-H. Kim, A.H. Omar, J.L. Tackett, M.A. Vaughan, D.M. Winker, C.R. Trepte, Y. Hu, Z. Liu, L.R. Poole, M.C. Pitts, J. Kar, B.E. Magill // Atmospheric Measurement Techniques. - 2018. - Vol. 11, Issue 11. - P. 6107-6135. - DOI: 10.5194/amt-11-6107-2018
- Kovalev, V.A. Elastic lidar: Theory, practice, and analysis methods / V.A. Kovalev, W.E. Eichinger. - Hoboken, New Jersey: John Wiley & Sons, Inc., 2004. - 615 p. - 0-471-20171-5. ISBN: 0-471-20171-5
- Prasad, N.S. Three-beam aerosol backscatter correlation lidar for wind profiling / N.S. Prasad, A.R. Mylapore // Optical Engineering. - 2017. - Vol. 56, Issue 3. - 031222. - DOI: 10.1117/1.OE.56.3.031222
- Soifer, V.A. Vortex beams in turbulent media: review / V.A. Soifer, O. Korotkova, S.N. Khonina, E.A. Shchepakina // Computer Optics. - 2016. - Vol. 40(5). - P. 605-624. -
- DOI: 10.18287/2412-6179-2016-40-5-605-624
- Suomi, I. Methodology for obtaining wind gusts using Doppler lidar / I. Suomi, S.-E. Gryning, E.J. O'Connor, T. Vihma // Quarterly Journal of the Royal Meteorological Society. - 2017. - Vol. 143. - P. 2061-2072. -
- DOI: 10.1002/qj.3059
- Stull, R. Practical meteorology: An algebra-based survey of atmospheric science (version 1.02b) / R. Stull. - University of British Columbia, 2017. - 940 p. - 978-0-88865-283-6.
- ISBN: 9780888652836
- Корреляционные методы лазерно-локационных измерений скорости ветра / Г.Г. Матвиенко, Г.О. Заде, Э.С. Фердинандов, И.Н. Колев, Р.П. Аврамова. - Новосибирск: Наука, 1985. - 223 с.
- Кропотов, Ю.А. Метод прогнозирования изменений параметров временных рядов в цифровых информационно-управляющих системах / Ю.А. Кропотов, А.Ю. Проскуряков, А.А. Белов // Компьютерная оптика - 2018. - Т. 42, № 6. - С. 1093-1100. -
- DOI: 10.18287/2412-6179-2018-42-6-1093-1100
- Dérian, P. Wavelet-based optical flow for two-component wind field estimation from single aerosol lidar data / P. Dérian, C.F. Mauzey, S.D. Mayor // Journal of Atmospheric and Oceanic Technology. - 2015. - Vol. 32, Issue 10. - P. 1759-1778. -
- DOI: 10.1175/JTECH-D-15-0010.1
- Proakis, J.G. Digital signal processing / J.G. Proakis, D.K. Manolakis. - 4th ed. - Prentice Hall, 2006. - 1104 p. - 978-0-13-187374-2.
- ISBN: 9780131873742
- Bishop, C.M. Pattern recognition and machine learning / C.M. Bishop. - Singapore: Springer, 2006. - 738 p. - 978-0-387-31073-2.
- ISBN: 9780387310732
- Агафонова, Ю.Д. Эффективность алгоритмов машинного обучения и свёрточной нейронной сети для обнаружения патологических изменений на магнитно-резонансных томограммах головного мозга / Ю.Д. Агафонова, А.В. Гайдель, П.М. Зельтер, А.В. Капишников // Компьютерная оптика. - 2020. - Т. 44, № 2. - С. 266-273. -
- DOI: 10.18287/2412-6179-CO-671
- Бакалов, В.П. Цифровое моделирование случайных процессов. - М.: Изд-во Сайнс-пресс. - 2002. - 88 с. - 5-94818-006-9.
- ISBN: 5948180069
- Филимонов, П.А. Алгоритм сегментации аэрозольных неоднородностей / П.А. Филимонов, М.Л. Белов, Ю.В. Федотов, С.Е. Иванов, В.А. Городничев // Компьютерная оптика. - 2018. - Т. 42, № 6. - С. 1062-1067. -
- DOI: 10.18287/2412-6179-2018-42-6-1062-1067
- Hastie, T. The elements of statistical learning / T. Hastie, R. Tibshirani, J. Friedman. - New York: Springer, 2001. - 745 p.
- Du, P. Improved peak detection in mass spectrum by incorporating continuous wavelet transform-based pattern matching / P. Du, W.A. Kibbe, S.M. Lin // Bioinformatics. - 2006(07). - Vol. 22, Issue 17. - P. 2059-2065. -
- DOI: 10.1093/bioinformatics/btl355
- Белов, М.Л. Лазерный дистанционный метод измерения порывов атмосферного ветра / М.Л. Белов, С.Е. Иванов, В.А. Городничев, Б.В. Стрелков // Вестник МГТУ. Сер. "Приборостроение". - 2014. - № 2. - С. 40-52.
