Алгоритмическое и программное обеспечение процесса культивирования сине-зеленых микроводорослей в пленочном биореакторе

Автор: Дранников Алексей Викторович, Павлов Игорь Олегович, Пономарв Александр Владимирович, Ситников Николай Юрьевич
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 2 (52), 2012 года.
Бесплатный доступ
Представлено математическое описание процесса культивирования сине-зеленых микроводорослей в пленочном биореакторе. Полученная модель позволяет выбрать рациональные и геометрические параметры биореактора.
Модель, процесс культивирования, микроводоросли, биореактор
Короткий адрес: https://sciup.org/14039850
IDR: 14039850 | УДК: 636.095
Algorithmic and software of process cultivation blue-green micro seaweed in the film bioreactor
The mathematical description of process cultivation blue-green micro seaweed in the film bioreactor is presented. The received model allows to choose rational and geometrical parametres of the bioreactor.
Текст научной статьи Алгоритмическое и программное обеспечение процесса культивирования сине-зеленых микроводорослей в пленочном биореакторе
Одной из важнейших задач комбикормовой промышленности является выработка продукции, которая сочетала бы в себе одновременно низкую цену и гарантированно высокое продуктивное действие. Этим требованиям в полной мере отвечают природные биологически активные добавки – суспензии синезеленых микроскопических водорослей (хлорелла, спирулина и др.). Их действие основано на естественном сочетании природных стимулирующих и биологически активных веществ, выделяемых клетками в культуральную среду (суспензию). Ранее стимулирующий эффект микроводорослей не использовался вследствие скармливания их в виде пасты или порошка. Получаемая белково-углеводная масса является трудноусвояемой из-за значительной толщины клеточных стенок (до 1 мкм при диаметре клетки 1,5…10 мкм), для разрушения которых требуется термическая обработка, повышающая энергозатраты и снижающая биологическую ценность продукта.
Поэтому перспективным является использование суспензии сине-зеленых водорослей, содержащих аминокислоты, витамины, ферменты и другие вещества, выделение которых клетками наиболее интенсивно в начальном периоде роста.
Получение суспензии целесообразно осуществлять в биореакторах пленочного типа, в которых она стекает по внутренней поверхности цилиндрических прозрачных трубок с одновременным подводом углекислого газа и световой энергии [1].
Нами разработан экспериментальный биореактор, позволяющий осуществлять процесс культивирования суспензии микроводорослей в широком диапазоне изменения технологических параметров [5, 7].
Цель исследований – выбор рациональных технологических и геометрических параметров биореактора методами математического моделирования.
Математическая постановка задачи моделирования определялась однопараметрической диффузионной моделью [2, 3, 4], учитывающей в общем случае распределение компонентов питания и микробных клеток по высоте трубок пленочного биореактора, основным параметром которой является коэффициент продольного перемешивания или критерий Пекле
Pe = WH / D h , где W - средняя скорости течения пленки; H -высота аппарата; D h - коэффициент диффузии.
При этом предполагалось, что радиальное перемешивание среды в колонне незначительно и концентрация вещества является непрерывной функцией пространственной координаты. Для установившегося процесса в биохимическом реакторе модель представлена в следующем виде:
D h dC - WdC ± tR ( C ) = 0, (1)
dz2 dz с граничными условиями третьего рода на левой границе участка z = 0: WC0 = WC—DH —, 0 Н dz z = Н : — = 0, dz где (+) - относится к «источнику», (-) - к «стоку»; C - концентрация распределяемого ве- щества; t - среднее время пребывания сус- пензии в аппарате; R(C) - скорость потребле- ния вещества из среды в процессе биосинтеза.
Предложено рассматривать распределение концентрации абсолютно сухой биомассы суспензии в безразмерном виде вдоль одномерной области:
1 d 2 x dx - „ 2x a
--5----+t (ex — fix ) = 0 , (2) Pe dZ2 dZ где £ - коэффициент скорости роста культуры; в - кинетический параметр; с граничными условиями:
Z = 0:
1 dx
Pe dZ
Z = 1: dx = 0, dZ
где x - безразмерная концентрация распределяемого вещества, x = C / C0; Z = z / Н - без- размерная пространственная координата.
Нами было использовано сочетание метода конечных элементов и метода Галёркина [6] для решения дифференциального уравнения (2) с заданными краевыми условиями задачи (3) - (4). Это позволило получить приближенное решение дифференциального уравнения (2) при выполнении условия: разность между приближенным и точным решениями должна быть ортогональна функциям, используемым при аппроксимации [6].
В соответствии с [6] представим дифференциальное уравнение (2) в неявном виде:
Lu — f = 0, где L - дифференциальный оператор, а приближенное решение найдем по формуле u = Е NU i , тогда
Lu — f = § , где § - ошибка результатов моделирования.
Для получения минимального значения § для каждой из базисных функций N i , ортогональных ошибке по области R , требуется выполнение равенства
J N i § dR = 0. (5)
R
В соответствии с методами Галёркина и конечных элементов получили уравнения в виде
J N p L { ф } dR = 0, в = i , j , k ,..., (6)
R где ф - искомая величина, которая аппрокси- мируется соотношением ф = Nфl+ N^j=\. N ]{Ф}, (7)
где [ N ] = [ N i N j ] - матричная строка;
{ Ф } =
' Ф/'
Ф
вектор-столбец.
Высший порядок производных в L(ф) не ограничен и на единицу больше порядка не- прерывности интерполяционных соотношений. Поскольку рассматриваемые интерполяционные соотношения (7) нулевого порядка непрерывности (непрерывна ф, но не ее первая производная), то в уравнения (6) включены производные порядка не выше первого. Это ограничение может вызвать сложности построения алгоритма, которые преодолены сокращением порядка L(ф) , интегрированием по частям.
Для решения модели объекта исследования (2) - (4) методом конечных элементов задана система дифференциальных уравнений в частных производных. Для упрощения описа-
Г [ N ( e ) ] d' x dZ = [ N ( e ' ^ — Le / J zz 2 L J zz
-
T dx Zj
f ZN ( e ) dx dZ dZ dZ
L ( e )
-
Z . (13)
ния алгоритма расчета уравнение (1) шем с заменой переменных d2 x dx
—х - a--+ bx = 0
dZ2 dZ с граничными условиями
перепи-
Z = 0:
Z = 1:
dx
—=A; dZ dx
= о , dZ
где a = Pe ; b = Pe t £ ; A = Pe x 0.
Применение метода Галёркина к дифференциальному уравнению (8) заключалось в решении интегрального уравнения
j [NI
о
1T [ d
dx I a—Z + bx ) J dZ = 0. (11)
Интерполяционная функция для x определена на отдельном элементе, поэтому уравнение (11) записано для суммы
NE T
X j [ N(e) ]
e = 1 L e )L
2 d 2 x ( e )
—/
--------1
dx ( e e a
[ ZZ
\
ZZ = 0, (12)
+ bx ( e ) )
J
где NE - число элементов; L ( e )- длина от-
дельного элемента.
Для вычисления выбраны функции формы и преобразован интеграл (12) таким образом, что он содержит производные порядка не выше первого.
Ограничимся линейной моделью для x x = NX, + N j X j =
( 7 A 7 | 1 - Z I , Z . [ L J L
интеграл
j [ N ( e ) ] L < e >
] d2x dZ dZ
преобразуем путем интегрирования по частям
Подставляя (13) в (11) и группируя подобные члены, получаем
T dx Zj
Г N ( e ) ] T dx
L ] dZ
Zi
- j
L ( e )
d [ N(e) ] ]
dZ
+ а Г N(e) ] ]
dx
—dZ + dZ
+ b j Г N ( e ) ] T xdZ . (14)
L < e ) L ]
Сумма интегралов в (1.14) представляет собой матрицу коэффициентов элемента [ k ( e ) ] в уравнении
[ k ( e ) ]( X } = { f ( e ) } .
Первое слагаемое в выражении (14) соответствует вектор-столбцу { F } и определяет производную dy / dx (наклон) на каждом конце конечного элемента. При неизвестном наклоне элемента в узловых точках первое слагаемое в (14) не учитывается.
Вычислим производные в выражении первого интеграла (14):
А [ N ] ] = d Г - L [ = 1 I -Ч, dZ dZ Z L [ 1
. L
dx dZ
—{ n }{ x } = -[ - 1;1] J X | , dZ L И J L [ X J J
и после подстановки получим
L
j [ dZ [ N ] T + a [ N ] T
1 a
L 2
1 a
L 2
dx
— ZZ = dZ
-+-
L 2
1 + -
L 2 ]
i
Вычислим второй интеграл в (14)
b j [N]T xdZ = b j [N]T xdZ =
Le ) Le )
|
; 0' 1 - L |
A + |
L x2 1 - |
1 • 0 - |
[ L |
a ^^^^^™ ^^^^^^^^^^e 2 |
|
0 |
X. |
1 |
a ^^^^^s ^^^^^^^^^^. |
||
|
. L . |
. L |
_ L |
2 |
1 a
L + 2 { X 1 1 +
L+a J. X 2
L
+ b 3
L
L
Верхние индексы отброшены, так как рассматривается отдельный элемент. Интегрирование выполняется в пределах от нуля до L, так как функции формы в (5) выражены в местной системе координат с центром в i - м узле, L - длина элемента.
Алгоритм решения задачи моделирования (8). Разобьем аппарат по длине на NE = 5 элементов (рис. 1), построенных на множестве узлов Q :{ X 1 , X 2,..., X 6},
^^^^^^B
L

= 0
Для элементов n = 2,..., NE :
L
L
a
2 a 7
1 a
---+
L 2
1 a
— + —

+ b
L
L 2
3 L
L 6
L б" L

= 0
X i = ( i - 1) • L , i = 1,..., NP , NP = NE + 1, L = 1/ NE . Пронумеруем элементы и узлы таким образом, чтобы каждый элемент e был ограничен сверху узлом i , а снизу - узлом j , причем i < j .
Объединим матрицы элементов, получим систему линейных алгебраических уравнений:
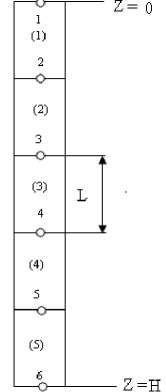
Рис. 1. Область перемещения суспензии сверху вниз: в скобках помечены номер конечного элемента, цифрой (помечен) - узел
|
(1 a bL ) - + + k L 2 3 ) |
1+ |
(1 k L |
a - +• 2 |
bL2 6j |
| u 2 |
- A = 0; |
||
|
(1 a bL Л k L + 2 + 6 j |
| u 1 |
+(" |
2 ^^^^. ^^^^^^^™ L |
2 bL + 3 |
j u 2 |
+( |
1 a bL' L " 2 + T. |
j U 3 = 0 |
|
(1 a bL Л k L + 2 + 6 j |
| u 2 |
+( |
2 - L |
2 bL + 3 |
| u 3 |
+( |
■ 1 - a + bL . L 2 6, |
j u 4 = 0; |
|
(1 a bL Л k L + 2 + 6 j |
| u 3 |
+( |
2 ^^^^^ ^^^^^^^. L |
2 bL + 3 |
^ " 4 |
+( |
' 1 a bL . "l" i+T. |
) u 5 = 0 |
|
(1 a bL Л k L + 2 + 6 j |
| u 4 |
+( |
2 - L |
2 bL + 3 |
| u 5 |
+( |
1 a bL . L ” k+T |
) u 6=0; |
|
(1 a bL Л k L + 2 + 6 j |
| u 5 |
+1 |
1 ^^^^^ ^^^^^^^^ L |
a —+ 2 |
bL 3 |
j u . |
= 0. |
(15) |
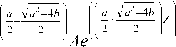
Тестовый пример. Для случая a - 4 b > 0 найдено точное решение задачи (8) - (10) для а = 1,1; b = 0,264; A = 0,055:
x ( Z ) =
Рассмотрим систему уравнений для первого элемента. Из (9) известны значения про-
2 e
+
dx изводных фикции x в узлах 1 и 6 — dZ
= A и
X 1



dx dZ
= 0. В других узлах значение производ- X 6
ной неизвестно, поэтому в них не указывается значение производной, а система уравнений для первого элемента в матричной форме имеет следующий вид:
V a 2 - 4 b - e


V a 2 - 4 b
Решая систему (15), получаем значение концентрации в узловых точках u i , i = 1^6. Текст программы представлен на рис. 2.
-
> restart;
Число элементов
-
> NE:=15;
NE:=15
Число узлов
-
> NP:=NE+1;
NP:=16
-
> PR_MKE:=proc(PE,tcp,epsilon,x0,N)
-
> local a,b,A,u,ur,i,n,L,SYST,PER,rez,Z,U,dr0,drk;
-
> global S;
-
> L:=1/N;
-
> a:=PE;
-
> b:=PE*tcp*epsilon;
-
> A:=PE*x0;
Система алгебраических уравнений
-
> ur[1]:=(-1/L+a/2)*u[1]+(1/L-a/2)*u[2]+b*L/3*u[1]+b*L/6*u[2]-A;
-
> for n from 2 to N-1 do
> ur[n]:=(1/L+a/2)*u[n-1]+(-1/L-a/2)*u[n]+b*L/6*u[n-1]+b*L/3*u[n]+(-1/L+a/2)*u[n]+(1/L-a/2)*u[n+1]
+b*L/3*u[n]+b*L/6*u[n+1];
-
> od;
-
> ur[N]:=(1/L+a/2)*u[N-1]+(-1/L-a/2)*u[N]+b*L/6*u[N-1]+b*L/3*u[N];
-
> SYST:={seq(ur[n],n=1..N)};
-
> PER:={seq(u[n],n=1..N)};
-
> rez:=fsolve(SYST,PER);
-
> for i from 1 to N do
-
> Z[i]:=(i-1)*L; od:
-
> for i from 1 to N do
-
> U[i]:=subs(rez,u[i]); od;
-
> dr0:=(U[2]-U[1])/L;
-
> drk:=(U[N]-U[N-1])/L;
-
> printf(" xn= %10.5f A= %10.5f dr0= %10.5f drk= %10.5f \n",U[1],A,dr0,drk);
-
> S:=[seq([Z[i],U[i]],i=1..N)];
-
> end proc:
-
> # PE tcp epsilon x0 N
-
> S1 :=PR_MKE(1.1,10,0.3,0.05,100):
xn= 0.00501 A= 0.05500 dr0= 0.05522 drk= 0.00082
-
> plot([S1]);
Рис. 2. Текст программы в языке символьных вычислений Maple
Результаты расчета представлены в виде кривой на рис. 3.
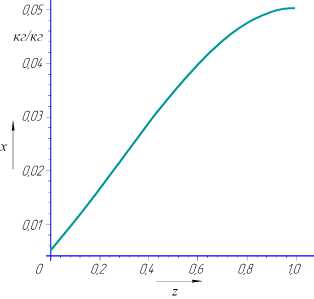
Рис. 3. Расчетная кривая изменения концентрации суспензии по высоте трубки
Из рис. 3 видно, что значение концентрации абсолютно сухих веществ суспензии увеличивается при течении суспензии сверху вниз к нижней точке прозрачной трубки био- реактора.
Результаты расчета методом конечных элементов оценивались средней ошибкой ап- проксимации:
100 n
Xi - Xi xi
Ac = Z n i=1
где x i , x i – точно вычисленное по формуле (16)
и вычисленное по методу конечных элементов значение концентрации; n – число узлов конечно-элементной модели.
При NE = 5 средняя ошибка аппроксимации вычисленной концентрации составила 2,2 %, а при NE = 10 – 0,04 %.
Предлагаем метод моделирования процесса культивирования сине-зеленых микроводорослей, основанный на математической интерпретации концентрации абсолютно сухих веществ суспензии при ее росте по высоте прозрачной трубки в пленочном биореакторе совместным сочетанием методов Галёркина и конечных элементов. Идентификация параметров предлагаемой модели по экспериментальным данным позволила получить удовлетворительную сходимость результатов моделирования и использовать их для определения геометрических размеров биореактора.
При решении задачи моделирования был рассмотрен линейный одномерный симплекс-элемент. Для повышения точности решения потребуется другой подход, который состоит в применении элементов высокого порядка, то есть комплекс или мультиплекс элементов, требующий меньшее количество элементов. Это могут быть квадратичные и кубические элементы [6], что будет следующим этапом при моделировании исследуемого процесса.
