Аналитическая модель компенсации двигательной ошибки в адаптивном управлении движением биомеханической системы

Автор: Загревский Валерий Иннокентьевич, Загревский Олег Иннокентьевич
Журнал: Человек. Спорт. Медицина @hsm-susu
Рубрика: Спортивная тренировка
Статья в выпуске: 2 т.19, 2019 года.
Бесплатный доступ
Цель. Разработать компьютерную программу моделирования движения объекта с заданными параметрами начального и конечного фазового состояния. Материалы и методы. Двигательная ошибка при выполнении спортивного упражнения является результатом отклонения в кинематическом состоянии спортсмена от параметров заданной программы движения. Математический аппарат адаптивного управления, основанный на использовании в математической структуре управляющей функции информации о текущих параметрах фазового состояния объекта движения, способен уменьшить рассогласование в параметрах программной и текущей траектории. В статье выдвигается и экспериментально подтверждается гипотеза о возможности компьютерного синтеза движений биомеханических систем с нейтрализацией двигательной ошибки на основе математического аппарата адаптивного управления. В проведенных вычислительных экспериментах математическое описание движения объекта основано на известном законе разомкнутого по времени сближения (А.П. Батенко, 1977), в котором требуется, чтобы и скорость, и координаты одновременно приняли бы заданные значения. Время движения в этом законе - неуправляемый параметр. Математическая модель объекта движения построена в форме системы дифференциальных уравнений первого порядка. Результаты. Математическая модель движения материальной точки с заданными значениями фазовых координат в начальный и конечный моменты времени реализована в компьютерной программе. Программа функционирует на базе интегрированной среды разработки Visual Studio Express 2013 в языковой среде Visual Basic 2010. Поддержка результатов моделирования обеспечивается числовой и графической информацией. Заключение. Разработанная компьютерная модель метода адаптивного управления реализует целевой результат движения и к конечному моменту времени нейтрализует рассогласование между текущим и программным кинематическим состоянием объекта. В модели спортивных упражнений результат нейтрализации проявляется в погашении двигательной ошибки.
Техника упражнения, биомеханическая система, двигательная ошибка, управление, синтез движения
Короткий адрес: https://sciup.org/147233524
IDR: 147233524 | УДК: 796.012 | DOI: 10.14529/hsm190210
Analytical model for compensating motion error in the adaptive motion control of the biomechanical system
Aim. The article deals with developing software to simulate the motion of an object with the given parameters of initial and final phase status. Materials and methods. A motion error in sports exercise is the result of kinematic deviation from the parameters of a given motion program. The mathematical apparatus of adaptive control allows neutralizing motion mistakes between a program and a real trajectory. It is based on utilising the information about current parameters of a phase status of a moving object in a mathematical structure of the control function. The article proposes and experimentally proves the hypothesis about the computer synthesis of motions in biomechanical systems based on the mathematical apparatus of adaptive control. In the computational experiments, a mathematical description of an object is based on a well-established law of open-time approximation (A.P. Batenko, 1977), which requires that both velocity and coordinates simultaneously take the given values. Motion time in this law is an uncontrolled parameter. The mathematical model of a moving object is built as a system of a first-order differential equation. Results. A mathematical model describing the motion of a material point with given phase coordinates at the initial and final points in time is implemented in a computer program. The program works based on the integrated development environment Visual Studio Express 2013 and the Visual Basic 2010 language environment. Conclusion. The developed computer model of adaptive control achieves the aim of any motion, which implies transferring an object from a given initial state to the required final state.
Текст научной статьи Аналитическая модель компенсации двигательной ошибки в адаптивном управлении движением биомеханической системы
В работе А.П. Батенко [2] предложен достаточно простой, но эффективный метод синтеза управления с обратной связью. В этой связи мы выдвинули гипотезу о возможности использования предлагаемого метода в синтезе адаптивного управления в движениях биосистем.
За одну из возможных форм адаптивного управления можно принять разомкнутое управление [2]. Задача разомкнутого управления заключается в переводе объекта управления из начального фазового состояния [So, Vo] c заданной координатой [So] и скоростью [Vo] в конечное фазовое состояние [Sk, Vk] c заданной координатой [Sk] и скоростью [Vk]. Время движения [Tk] в разомкнутом управлении не
рое обеспечивает возврат объекта движения
регламентируется.
Закон управления . Для заданных условий задачи закон управления, в котором от
на программную траекторию.
Возвращение объекта движения на программную траекторию может быть достигну-
сутствует время выполнения задачи, имеет вид [2]
и —
К2 - V 2 ko
2( Sk — S o ),
а движение объекта, осуществляемое по закону (1), описывается дифференциальным уравнением:
то при условии, что адаптивное управление формируется на основе обратной связи, учитывающей информацию о текущем состоянии объекта по координате и скорости [ S , V ]. Закон управления с обратной связью может быть получен заменой в (1) начальных значений фазовых координат [ S o , V o ] их текущими значениями [ S , V ]:
d 2S
2 — ( S k - S ) + dt

— vk 2 .
Программное управление . Решением (2)
Vk 2 - V 2 2( S k - S ).
является функция
S = S o + V o t +
( к2-К2 I t2 kot .
( 2( S k - S o ) J 2
Элементами первой и второй производной по t от S в уравнении (3) являются скорость ( V ) и ускорение объекта ( и )
В работе [2] показано, что закон управления (6) можно привести к виду, в котором в синтезируемом управлении присутствует обратная связь по текущей координате ( S ) и текущей скорости ( V )
и — ko + ksS + kvV 2 . (7)
Здесь коэффициенты k o , k s , k v зависят от но-
— = V — V + Vk--Vo-1, dt o 2(Sk - So)
d 2 S — u — V k 2 - Vo2
dt 2 2( S k - S o ).
мера квадранта, в котором находится изображающая фазовая точка объекта:
ko =
v,2-v2 ( s v2
' k o о 1 - o + r o
2( S k - S o ) ( A S J 2 A S ,
Уравнения (3, 4) суть заданного про
kS —
граммного управления при наложенных условиях на начальное и конечное фазовое состояние объекта. Время движения ( T V ) не рег-
V. 2 - V 2
ko
,;
2AS(Sk - So) V2
если квадрант I ( x > 0, y > 0);
ламентируется, но определяется из выражения
T — 2( S k - S o ) V Vk + Vo
ko —
.
V 2 - Vo 2 L So I V 2 k o 1 o I k
2( S k - S o ) I A S J 2 A S ,
Уравнения (3, 4) являются уравнениями программного управления, обеспечивающие перемещение объекта из начального фазового состояния [ S o , V o ] в конечное фазовое состояние [ S k , V k ], в соответствии с заданным законом (1) изменения ускорения ( и ).
Адаптивное управление. Задача возвращения объекта на заданную траекторию появ-
kS —
V2 - V 2 1
ko
, ;
2 A S ( S k - S o ) V 2 A S
если квадрант II ( x < 0, y > 0);
К2-К2 ( S \ V2 k — Vk----Vol 1 + SO. I-'°, o 2(Sk - So) ( AS J 2AS
К 2 - V 2 1
ko ks , kv ;
S 2 A S ( S k - S o ) V 2 A S
ляется в том случае, если заданное начальное фазовое состояние объекта по координате не соответствует параметрам заданного программного управления в начальный момент времени ( t o ). Такой ситуации в технической
если квадрант III ( x < 0, y < 0);
подготовке спортсмена соответствует двигательная ошибка упражнения, возникающая в процессе выполнения целевого упражнения [4, 5, 9, 11]. В этом случае необходимо синтезировать такое адаптивное управление, кото-
, Vk 2 - V o 2 C, S o I Vk 2 k„ — 1 + , o 2( S k - S o ) ( A S J 2 A S
V 2 - v 2 1
ko , ;
S 2AS(Sk - So) V 2AS если квадрант IV (x > 0,y < 0).
Номеру квадранта соответствует местоположение фазовой точки, ограниченной ося-
ми ( x , y ) прямоугольной декартовой системы координат в соответствии с уравнениями (8).
Вычислительный эксперимент. На первом этапе вычислительных экспериментов рассматривалось движение материальной точки (кисть, стопа, общий центр масс тела спортсмена) под действием программного управления (1). На втором этапе рассматривалась возможность использования адаптивного управления для компенсации двигательной ошибки и возвращения объекта движения на программную траекторию.
Программное управление. Исходные данные для программной траектории объекта движения: начальное фазовое состояние [ S o = 1,00 м, V o = -1,0 м/с], конечное фазовое состояние [ S k = 0 м, V k = 0 м/с]. Пусть A S = 0,05 м. Тогда время движения равно
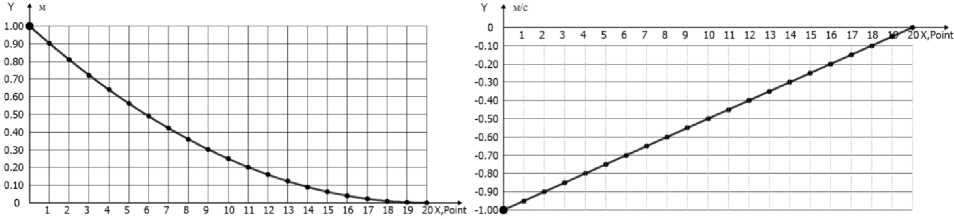
A - Координаты B - Скорость
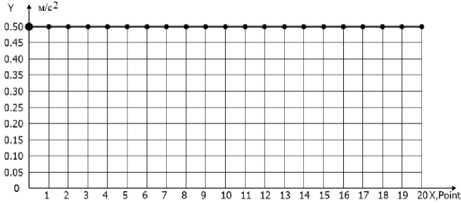
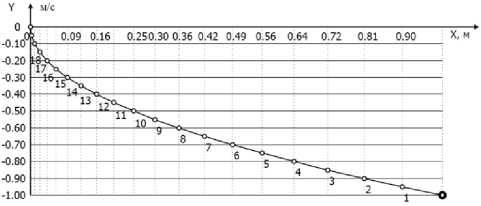
C - Ускорение D - Фазовая траектория
Рис. 1. Элементы программной траектории (A, B, D) и программного управления (C) Fig. 1. Program trajectory (A, B, D) and program control (C) elements
B - Скорость
A - Координаты
C - Ускорение
D - Фазовая траектория
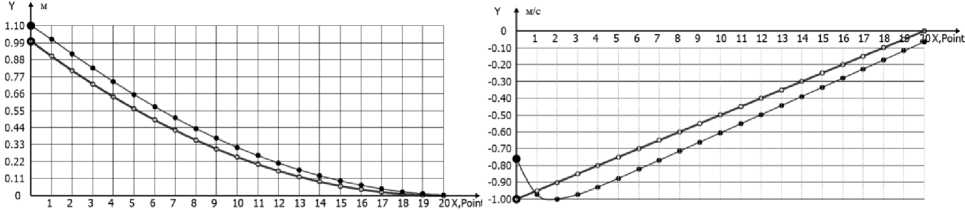
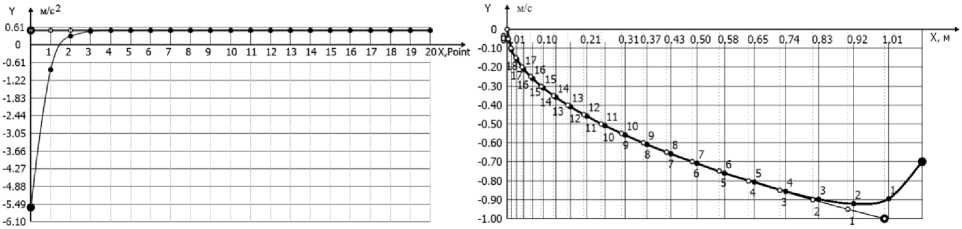
Рис. 2. Элементы программной траектории (–o–; A, B, D) и программного управления (–o–; C), адаптивной траектории (A, B, D) и адаптивного управления (C)
Fig. 2. Program trajectory (–o–; A, B, D), program control (–o–; C), adaptive trajectory (A, B, D), and adaptive control (C) elements
2,0 с, что следует из (5). Программная траек тория и ее элементы, реализующие поставленную задачу, показаны на рис. 1.
Временная длительность движения поделена на 20 точек (рис. 1). Шаг выдачи результатов вычислений - 0,1 с, шаг интегрирования - 0,001 с. По условиям поставленной задачи коэффициенты закона управления (7) из формульных зависимостей (8) будут рассчитываться для IV квадранта. Закон управления принимает вид: и = 0,5 - 10 S + 10 V 2.
Адаптивное управление . Двигательная ошибка, характеризующая отклонение объекта движения от начального состояния, задавалась списком [ S o = 1,10 м, V o = -0,70 м/с]. В соответствии с условиями задачи конечное фазовое состояние объекта задано в виде:[ S k = 0 м, V k = 0 м/с].
Координаты объекта ( S ) и скорость ( V )
вычислялись численным
интегрированием
системы уравнений:
V = и ,
_ S = V .
Результаты вычислительного эксперимента с использованием адаптивного управления, корректирующего отклонения от программной траектории, приведены на рис. 2.
Выводы
-
1. Программное управление с постоянным ускорением реализует задачу приведения объекта из начального заданного фазового состояния в требуемое конечное фазовое состояние.
-
2. Адаптивное управление выполняет задачу нейтрализации двигательной ошибки и приводит объект движения в конечный момент времени в заданную точку пространства.
-
3. Полная компенсация двигательной ошибки по скорости не достигается, и в конечный момент времени достигнутая скорость не соответствует заданной.
Список литературы Аналитическая модель компенсации двигательной ошибки в адаптивном управлении движением биомеханической системы
- Андреев, А.С. О стабилизации программных движений голономной механической системы / А.С. Андреев, О.А. Перегудова // XII Всероссийское совещание по проблемам управления ВСПУ-2014. - М.: Ин-т проблем управления им. В.А. Трапезникова РАН, 2014. - С. 1840-1843.
- Батенко, А.П. Управление конечным состоянием движущихся объектов / А.П. Батенко. - М.: Сов. радио, 1977. - 256 с.
- Борисов, О.И. Методы управления робототехническими приложениями: учеб. пособие / О.И. Борисов, В.С. Громов, А.А. Пыркин. - СПб.: Ун-т ИТМО, 2016. - 108 с.
- Гавердовский, Ю.К. Обучение спортивным упражнениям. Биомеханика. Методология. Дидактика / Ю.К. Гавердовский. - М.: Физкультура и Спорт, 2007. - 912 с.
- Горячева, Н.Л. Двигательные ошибки в спорте: учеб.-метод. пособие / Н.Л. Горячева. - Волгоград: ВГАФК, 2017. - 64 с.
