Анализ алгоритмов обнаружения импульсного шума на изображениях

Автор: Фан Нгок хоанГ., Спицын Владимир Григорьевич
Журнал: Проблемы информатики @problem-info
Рубрика: Средства и системы обработки и анализа данных
Статья в выпуске: 2 (10), 2011 года.
Бесплатный доступ
Выполнен анализ алгоритмов обнаружения импульсного шума на изображениях. Проведено сравнение результатов, полученных с помощью этих алгоритмов по количеству необнаруженных и неправильно обнаруженных пикселей, искаженных импульсным шумом.
Обработка изображенияя, импульсный шум, обнаружение шума
Короткий адрес: https://sciup.org/14362800
IDR: 14362800 | УДК: 004.932
Текст научной статьи Анализ алгоритмов обнаружения импульсного шума на изображениях
Введение. Изображения часто искажаются шумами, появляющимися на этапах их получения и (или) передачи. Причинами возникновения шумов на изображениях могут быть сбои в работе канала связи, шум видеодатчика и др. Одним из основных видов шумов является импульсный шум [1].
Пусть X ij — интенсивность пикселя ( i , j ) исходного изображения X , [ n min , n max ] — динамический диапазон изображения X , Y ,j — интенсивность пикселя ( i , j ) зашумленного изображения Y . Тогда импульсный шум определяется по формуле
Y j = ( X ij , 1 " p (1)
Ri,j, p, где p — вероятность импульсного шума; Rij — заменитель значения интенсивности пикселя (i,j). При Ri,j Е [nmin, nmax] изображение искажается импульсным шумом случайного значения (RVIN), при Ri,j Е {nmin, nmax} — импульсным шумом фиксированного значения или шумом “соли и перца” (SPN).
Различие шумов между SPN и RVIN показано на рис. 1. В случае SPN значение R ij в формуле (1) равно n min (0) или n max (255). Однако в случае RVIN значение R i,j изменяется в пределах от n min до n max .
Одной из основных задач в области обработки изображения является подавление шумов. При этом, как правило, для удаления шумов используются фильтры. Обычно процесс фильтрации включает два этапа: классификацию (обнаружение) и реконструкцию (фильтрование).
В данной работе рассматриваются алгоритмы обнаружения импульсного шума “соли и перца”. Выполнен анализ этих алгоритмов и проведено сравнение результатов, полученных с их помощью.
а

0 {0,255} 255
б

0 {0,255} 255
Рис. 1. Представление шума “соли и перца” при значении R i,j Е { n min , n max } ( а ) и импульсного шума случайного шума при R i,j Е [ n min , n max ] ( б )
Алгоритмы обнаружения импульсного шума. В [2] предложен алгоритм обнаружения импульсного шума “соли и перца” с использованием адаптивного медианного фильтра (АМФ). Пусть Z — изображение, полученное при применении АМФ к зашумленному изображению Y . Заметим, что в формуле (1) значение Y i,j зашумленного пикселя равно R i,j Е {n min , n max }, следовательно, множество зашумленных SPN пикселей можно определить следующим образом:
M = { ( i, j ) Е A : Y i,j = Z i,j и Y i,j Е {n min ,n max }} .
Множество неискаженных пикселей определяется как M c = A\M .
В [3] предложен другой алгоритм обнаружения импульсного шума на основе применения параметра β — масштабного параметра, который определяется на основе изменения значений интенсивности в окрестности пикселя. Этот параметр представляет собой разность между значениями интенсивности центрального пикселя Yi,j и соседних пикселей Ym,n в окрестности. Одной из формул, предложенных для масштабной оценки, является формула для среднего значения (Yi,j — Ymn)2 в окрестности вх (i,j) = n
^^^^^^^^^г
J 52 ( Y ij - Y mn \ ) , x ( m,n ) ∈ A
где A — множество N — 1 соседних пикселей.
Если значение β -пикселя мало, то он не является искаженным пикселем. В противоположном случае если значение β больше порогового значения, то пиксель является искаженным. В [3] использовалась окрестность размером 3 х 3 ( N = 9). По результатам экспериментов пороговое значение равно 90.
В [4] предложен другой алгоритм обнаружения импульсного шума на основе учета интенсивности и приближения локальной непрерывности. Первое правило сформулировано по значению интенсивности. Пусть t 1 — порог для обнаружения импульсного шума. Пиксели, значения интенсивности которых меньше значения t 1 или больше, чем n max — t 1 , с большей вероятностью являются искаженными. Множество этих пикселей определяется следующим образом:
N 1 = { ( i,j ) : Y j < 1 1 или Y i j > n max
^^^^^^^^^г
t 1 } •
Второе правило сформулировано на основе применения приближения локальной непрерывности. В соответствии с этим правилом, если характер изменения значений пикселей в локальной окрестности достаточно гладкий, текущий пиксель имеет меньшую вероятность искажения импульсным шумом. Пусть Y i,j — значение интенсивности текущего пикселя,
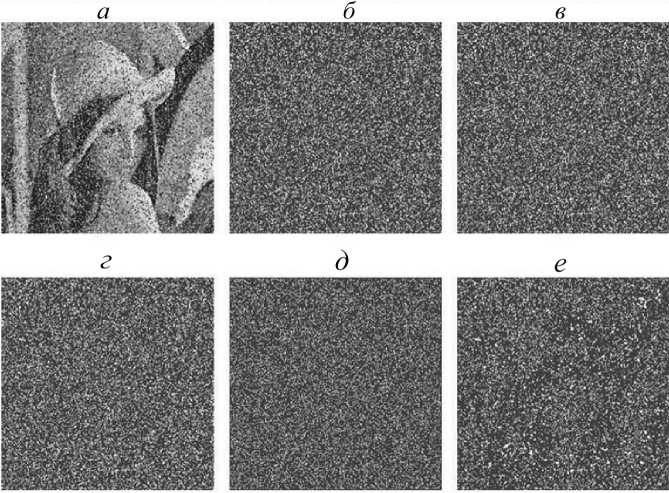
Рис. 2. Результаты обнаружения импульсного шума с плотностью 20 %: а — зашумленное изображение; б — AdapMed3 х 3; в — AdapMed5 х 5; г — AdapMed7 х 7; д — Threshold123; е — Beta
Y m,n — значение интенсивности восьми соседних пикселей окрестности, t 1 и t 2 — соответственно пороговое значение разности интенсивностей и пороговое значение пропорции, выраженные в процентах. Множество этих пикселей определяется по формуле
N 2 = {( i,j ): count ( | У ;^
^^^^^^^^^г
Y m,n \ > t 2 ) 1
------------- / t 3 •
Множество пикселей, искаженных импульсным шумом, является пересечением двух предыдущих множеств:
N = N 1 n N 2 .
В соответствии с экспериментами, проведенными в [4], значения порогов t 1 , t 2 и t 3 равны 0,15; 0,30 и 0,80 соответственно.
Результаты экспериментов. Выполнен анализ и проведено сравнение результатов перечисленных алгоритмов обнаружения импульсного шума “соли и перца”. Оценка результатов определяется по количеству неправильно обнаруженных пикселей и по количеству необнаруженных зашумленных пикселей. Пусть алгоритмы, основанные на АМФ с максимальным размером окрестности 3 х 3, 5 х 5 и 7 х 7, называются AdapMed3 х 3, AdapMed5 х 5 и AdapMed7 х 7 соответственно. Алгоритм, основанный на параметре в , называется Beta. Алгоритм, основанный на порогах t 1 , t 2 и t 3 , называется Threshold123.
Расчеты с использованием указанных алгоритмов проводились для изображения “Лена” с различными плотностями импульсного шума. На рис. 2 представлены результаты обработки изображения “Лена”, искаженного импульсным шумом с плотностью 20 %.
Количество неправильно обнаруженных пикселей (НОП) и необнаруженных пикселей (НП)
|
Плотность, % |
AdapMed3 х 3 |
AdapMed5 х 5 |
AdapMed7 х 7 |
Threshold123 |
Beta |
|||||
|
НОП |
НП |
НОП |
НП |
НОП |
НП |
НОП |
НП |
НОП |
НП |
|
|
1 |
0 |
7 |
0 |
1 |
0 |
0 |
0 |
9 |
4 |
162 |
|
2 |
0 |
10 |
0 |
0 |
0 |
0 |
0 |
14 |
3 |
291 |
|
3 |
0 |
7 |
0 |
0 |
0 |
0 |
0 |
35 |
8 |
425 |
|
4 |
0 |
9 |
0 |
0 |
0 |
0 |
0 |
62 |
7 |
587 |
|
5 |
0 |
17 |
0 |
1 |
0 |
0 |
0 |
83 |
15 |
671 |
|
6 |
0 |
24 |
0 |
0 |
0 |
0 |
0 |
153 |
20 |
838 |
|
7 |
0 |
25 |
0 |
2 |
0 |
0 |
0 |
188 |
27 |
969 |
|
8 |
0 |
15 |
0 |
0 |
0 |
0 |
0 |
303 |
48 |
1139 |
|
9 |
0 |
33 |
0 |
1 |
0 |
0 |
0 |
353 |
40 |
1267 |
|
10 |
0 |
26 |
0 |
2 |
0 |
0 |
0 |
455 |
74 |
1337 |
|
15 |
0 |
44 |
0 |
1 |
0 |
0 |
0 |
1267 |
141 |
2055 |
|
20 |
0 |
131 |
0 |
0 |
0 |
0 |
0 |
2668 |
395 |
2760 |
|
25 |
0 |
228 |
0 |
0 |
0 |
0 |
0 |
4437 |
708 |
3300 |
|
30 |
0 |
552 |
0 |
0 |
0 |
0 |
0 |
7145 |
1435 |
3925 |
|
35 |
0 |
981 |
0 |
8 |
0 |
0 |
0 |
9737 |
2182 |
4345 |
|
40 |
0 |
1829 |
0 |
26 |
0 |
0 |
0 |
13 171 |
3246 |
5061 |
|
45 |
0 |
2931 |
0 |
61 |
0 |
0 |
0 |
17 111 |
4560 |
5709 |
|
50 |
0 |
4736 |
0 |
220 |
0 |
1 |
0 |
21 173 |
6310 |
6256 |
В таблице указано количество необнаруженных пикселей и количество неправильно обнаруженных пикселей. На рис. 3, 4 представлены результаты сравнения с данными таблицы. Отметим, что алгоритм обнаружения шума, в котором используется адаптивный медианный фильтр с максимальным размером окрестности 7 х 7 (AdapMed7 х 7), дает наилучший результат.
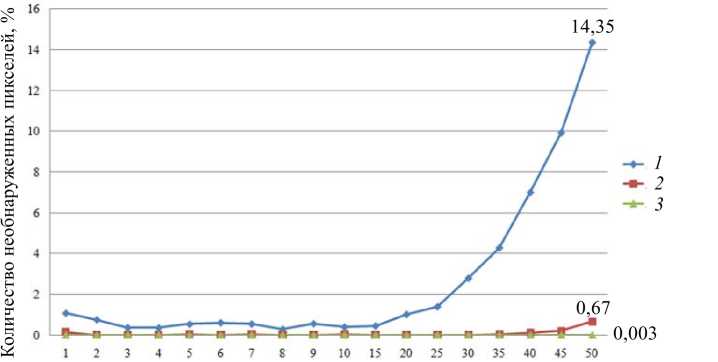
Плотность импульсного шума, %
Рис. 3. Результат сравнения по количеству необнаруженных пикселей алгоритмов AdapMed3 х 3 ( 1 ), AdapMed5 х 5 ( 2 ), AdapMed7 х 7 ( 3 )
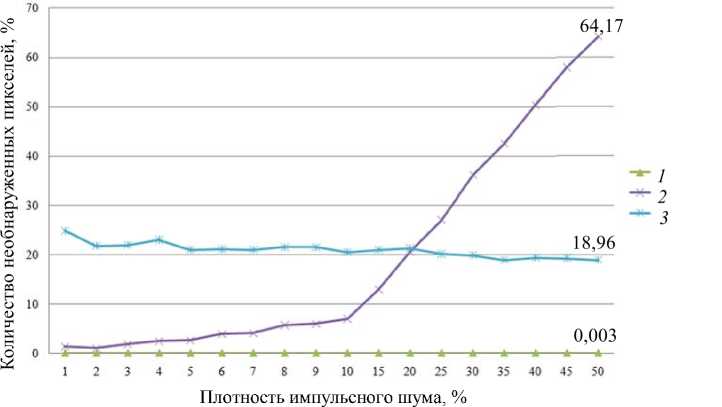
Рис. 4. Результат сравнения по количеству необнаруженных пикселей алгоритмов AdapMed7х 7 (1), Threshold123 (2), Beta (3)
Заключение. В данной работе выполнен анализ и проведено сравнение результатов, полученных с помощью алгоритмов по обнаружению импульсного шума фиксированного значения или шума “соли и перца”. Результаты проведенных экспериментов показали, что алгоритм на основе адаптивного медианного фильтра с максимальным размером окрестности 7 х 7 дает наилучший результат по сравнению со всеми рассмотренными алгоритмами.
Список литературы Анализ алгоритмов обнаружения импульсного шума на изображениях
- Gonzalez R. C., Woods R. E. Digital image processing. Boston: Addison-Wesley, 2001. 813 p.
- Chan R., Ho C., Nikolova M. Salt-and-pepper noise removal by median-type noise detectors and detail-preserving regularization//IEEE Trans. Image Proc. 2005. V. 14, N 10. P. 1479-1485.
- Kam H. S., Tan W. H. Noise detection fuzzy (NDF) filter for removing salt and pepper noise//Lecture Notes Comput. Sci. 2009. V. 5857. P. 479-486. (Intern. visual informatics conf. 2009 (IVIC'09)).
- Najeer A. J., Rajamani V. Design of hybrid filter for denoising images using fuzzy network and edge detecting//Amer. J. Sci. Res. 2009. Iss. 3. P. 5-14..
