Анализ БПЛА, как актуальных радиолокационных целей, и их маскирующих факторов

Автор: Коптев В.А.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 6-1 (93), 2024 года.
Бесплатный доступ
В данной работе анализируются БПЛА, как актуальные радиолокационные цели. Описаны их маскирующие факторы, влияющие на обнаружение БПЛА. Особое внимание уделено конструктивным особенностям БПЛА, затрудняющим их обнаружение, таким как аэродинамическая форма и использование радиопрозрачных или радиопоглощающих материалов. В работе представлены классификации БПЛА и оценка их распределения по количеству разработок, что позволяет определить основные характеристики наиболее часто встречающихся целей в реальных условиях.
Бпла, обнаружение целей, рлс, маскирующие факторы, миниатюризация авиационной техники
Короткий адрес: https://sciup.org/170205388
IDR: 170205388 | DOI: 10.24412/2500-1000-2024-6-1-244-250
Analysis of UAVs as current radar targets, their masking factors
This paper analyzes UAVs as current radar targets. Their masking factors affecting the detection of UAVs are described. Special attention is given to the design features of UAVs that complicate their detection, such as aerodynamic shape and the use of radio-transparent or radio-absorbing materials. The paper presents classifications of UAVs and an assessment of their distribution by the number of developments, which allows for determining the main characteristics of the most frequently encountered targets in real conditions.
Текст научной статьи Анализ БПЛА, как актуальных радиолокационных целей, и их маскирующих факторов
Ранее радиолокационными целями являлись достаточно крупные объекты, такие как самолёты и корабли. Их обнаруживали и отслеживали с целью раннего предупреждения возможных угроз. Развитие радиолокационных систем (РЛС) было направлено на увеличение вероятности обнаружения, увеличение точности определения параметров целей и применение новых инженерных решений для улучшения работы.
В свою очередь, воздушные цели также претерпели эволюцию. Ранее это были объекты с большой радиолокационной заметностью, такие как крупные самолёты и ракеты. Авиационная техника прошла по пути миниатюризации: малоразмерные самолёты и беспилотные летающие аппараты (БПЛА). Разнообразие выполняемых ими задач и универсальность использования, привело к тому, что БПЛА стали массово распространяться на разные сферы жизни общества. В том числе, их нелегальное использование может нести определённые угрозы. Следовательно, требуется контролировать их применение на определённых территориях. Определим, какие особенности БПЛА препятствуют их обнаружению [1].
Маскирующие факторы.
У БПЛА имеется ряд конструктивных особенностей, затрудняющих их своевременное обнаружение. Например, особая аэродинамическая форма с минимальным количеством плоских поверхностей приводит к слабому вторичному излучению, отражаемому в направление РЛС, в конструкции могут иметься радиопрозрачные или радиопоглощающие материалы. Небольшие размеры самих аппаратов и множество других конструктивных особенностей, снижающие заметность объектов и усложняют задачу обнаружения. Раздерём их подробнее [1-2].
1. Геометрические особенности и размеры конструкций.
Это один из ключевых аспектов, усложняющих обнаружение БПЛА. При радиолокации радиоволны отражаются от различных элементов объекта во всех направлениях, рассеивая энергию. Элементы конструкции, расположенные перпендикулярно направлению распространения радиоволн, или соединения деталей, образующие уголковый отражатель, вносят наибольший вклад в общую мощность вторичного излучения.
Характеристика цели, которая показывает способность объекта отражать часть мощности поля в направлении приёмника, является Эффективная площадь рассеивания (ЭПР). Если объект имеет небольшие размеры, его ЭПР будет ещё меньше, поскольку только часть отражённого сигнала будет приниматься. В общем случае эту характеристику можно рассчитать (1) [3].
, П2
ст = 4nR2 — (1)
П 1
Где, 4nR2 - площадь сферы пространства с радиусом R, до которой дошла электромагнитная волна, создающая плотность потока мощности П 1 в точке нахождения цели. А П2 - плотность потока мощности, создаваемая вторичным излучением цели на приёме РЛС. В формуле (1) присутствует величина расстояния, но это не означает её зависимости от него, увеличивая R во столько же раз падает П2. Это энергетический параметр, который используется для оценки радиолокационной заметности объекта [3].
Значение ЭПР также зависит от длины волны. Если размеры неровностей на поверхности радиоотражающих деталей меньше, чем λ/16, то отражение от такой поверхности можно считать зеркальным. Если длина волны значительно превышает размеры конструкции, радиоволны распространяются вокруг объекта, огибая его и создавая слабый отражённый сигнал. В результате сложный характер отражения и зависимость ЭПР от угла обзора цели (на практике её значение усредняется на определённом диапазоне углов) приводят к тому, что мощность вторичного излучения является случайной величиной [3].
2. Особенности материалов исполнения конструкций.
В дополнение к вышесказанному, для уменьшения ЭПР используются материалы со специфическими электромагнитными свойствами. Начиная с радиопрозрачных элементов конструкции (пластиковый корпус, пластиковые винты) и заканчивая применением покрытий, рассеивающих (поглощающих) излучение вместо его отражения (технология «Stealth»). Без учёта дополнительных факторов, снижающих
ЭПР, её значение для БПЛА можно оценить в пределах 0,1–0,01 м2. Если использовать средства, уменьшающие радиолокационную заметность объекта, значение ЭПР может быть снижено ещё ниже уровня 0,01 м2. [2, 4]
В результате возникает вопрос о том, возможно ли физически обнаружить такой объект средствами радиолокации на достаточном расстоянии. Приведём пример: выражение (2) для расчёта ЭПР прямоугольной металлической пластины (со сторонами a, b и площадью S), повёрнутой перпендикулярно к РЛС. Этот параметр можно аналитически вычислить только для объектов простой геометрической формы. Для объектов со сложной аэродинамической формой ЭПР определяется путём моделирования или экспериментально. Если взять частоту радиосигнала 10 ГГц, можно приблизительно рассчитать эффективную площадь поверхности гипотетического объекта с ЭПР 0,01 м2. Которая, в итоге составила « 0,85 * 10-3 м2. Сравнить это значение можно с площадью листа бумаги формата А10, размеры которого составляют 37 x 26 мм [4].
с^4^^ 0,01 =^=> S
тах Л2 0,032
= 8.457 * 10-4 м2 (2)
Дополнительно, для сравнения, в таблице 1 представлены геометрические размеры двух БПЛА, и других радиолокационных целей, найденных в открытых источниках. Величины оценок ЭПР можно экстраполировать в зависимости от размеров соответствующих объектов. Для более точных оценок необходимо провести моделирование их радиоотражающих свойств [4].
Таблица 1. Сравнение летающих объектов, геометрических размеров, и оценок ЭПР.
|
Летательный объект |
Тип объекта |
Ширина, м |
Высота, м |
Длинна, м |
|
Phantom 3 |
Вертолёт |
0,35 |
0,2 |
0,35 |
|
RQ-11 Raven |
Самолёт |
1,4 |
1,1 |
0,96 |
|
Tomahawk |
Самолёт |
2,62 |
0,53 |
6,25 |
|
AH-64 Apache |
Вертолёт |
2,03 |
4,66 |
10,59 |
|
Ми-8 |
Вертолёт |
2,3 |
4,75 |
18,42 |
|
МИГ 29 |
Самолёт |
11,36 |
4,73 |
17,32 |
|
F-16 |
Самолёт |
9,45 |
5,09 |
15,03 |
|
F-15 |
Самолёт |
13,05 |
5,63 |
19,43 |
3. Активное маневрирование.
У пилотируемых аппаратов и БПЛА разные сферы применения, цели и задачи. Поэтому сравнивать их манёвренные воз- можности сложно. Но если рассматривать этот вопрос, в общем и целом, то у БПЛА, особенно у низкоскоростных моделей, манёвренность лучше.
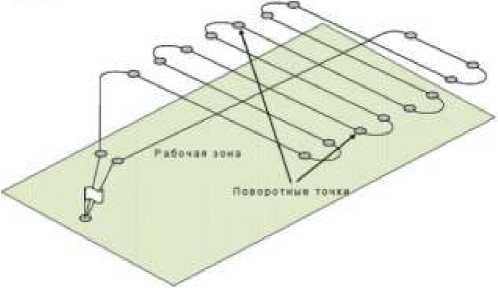
Рис. 1. Траектория полета БПЛА «Змейка» [5]
Рассмотрим конструкцию БПЛА вертолётного типа, рисунок 2. Такие аппараты способны к непредсказуемой траектории полёта: от почти неподвижного зависания в одной точке пространства до резкого увеличения скорости в вертикальной и горизонтальной плоскости. Они могут пере- мещаться на малых скоростях и на малых высотах, что снижает эффективность систем обнаружения, поскольку такие объекты становятся незаметными для радаров из-за пассивных помех, создаваемых окружающими объектами [1, 2].

Рис. 2. Примеры исполнения БПЛА вертолётного типа [4]
Другой тип конструкции – это БПЛА самолётного типа, рисунок 3. Они представляют собой беспилотные самолёты и также способны выполнять сложные манёвры. Они обладают большой продолжи- тельностью и дальностью полёта. По сути, БПЛА самолётного типа в определённой степени могут заменять функции пилотируемой авиации, но без её недостатков: низкая стоимость, безопасность использо- вания, быстрота развёртывания, универсальность применения. При этом они сохраняют низкую видимость для средств обнаружения, что серьёзно затрудняет их отслеживание.

Рис. 3. Примеры исполнения БПЛА самолётного типа [4]
4. Разные варианты управление БПЛА
Одним из важных факторов, затрудняющих обнаружение БПЛА, являются разнообразные возможности управления ими. Можно выделить три основных способа управления БПЛА, а также различные средства для их улучшения и повышения точности ориентации в пространстве [1, 6].
4.1. Первым методом является автономное управление, то есть без участия оператора. БПЛА следуют заранее определённым маршрутам и алгоритмам наведения. Информация поступает от встроенных датчиков, таких как инерциальная навигационная система, или от пассивного приёма навигационных сигналов, например, GPS или ГЛОНАСС, либо устанавливается местоположение по рисунку местности, а также от других сенсоров. Таким образом, отсутствует обмен радиосигналами с внешними системами навигации, что обеспечивает режим радиомолчания и делает обнаружение беспилотника по наличию канала связи невозможным. Однако коррекция маршрута движения при возникновении ошибок наведения также невозможна.
4.2. Второй способ управления беспилотными аппаратами – дистанционное управление с помощью операторов. Этот метод можно разделить на два уровня: стратегический и тактический. Стратегический уровень относится к тяжёлым
4.3. Третий метод управления беспилотными аппаратами – комбинированный. Часть пути дрон следует по заранее заданному маршруту, используя собственные навигационные системы, а в конце переходит под управление оператора. До этого момента беспилотник не излучает сигналы в радиоэфир, за исключением небольшого количества вторичного излучения от облучения РЛС. Поэтому засечь его с помощью средств радиоразведки будет трудно. Время для адекватной реакции будет только на последнем этапе полёта.
5. Разнообразие комплектующих аппарата.
6. Имитация других целей.
БПЛА, выполняющим полёты на дальние расстояния. В этом случае управление беспилотниками, осуществляется с помощью специализированных спутниковых систем связи. Из-за этого режим радиомолчания не может быть обеспечен. Однако оператор имеет полный контроль над БПЛА из центра управления и самостоятельно, с некоторой задержкой, выстраивает траекторию полёта, избегая систем ПВО и РЛС. Тактический уровень предназначен для управления лёгкими БПЛА, находящимися рядом с оператором, практически в пределах прямой видимости. В таких условиях оператор использует не только информацию, полученную от дрона, но и свои ощущения и другие сенсорные устройства. Оператор обменивается данными с БПЛА и получает оперативную обстановку в нужной области пространства.
В дополнение к вышесказанному, даже активный канал связи оператора с БПЛА не будет являться надёжным фактором, облегчающим обнаружение. Поскольку канал связи можно засечь только при приближении к конечной части своего маршрута. Кроме того, он может быть защищён сложными методами шифрования, использовать широкополосные сигналы, скрытые за шумами, или другие методы модуляции сигнала и рабочих частот, что затрудняет идентификацию канала связи с БПЛА.
Разные материалы элементов корпуса, пропеллеров, внутренних компонентов электроники и прочих составляющих конструкции БПЛА у разных аппаратов неодинаковы. От них существенно зависят лётные характеристики, манёвренность и сфера решаемых задач. Вследствие этого невозможно чётко определить сигнатуру цели, по которой можно было бы установить, от какого аппарата отразился сигнал [1].
Например, пропеллеры большего диаметра с большим числом лопастей обладают высокой подъёмной силой. Или для получения крутящего момента используются электромоторы с аккумуляторами или двигатели внутреннего сгорания с топливными баками. Всё это будет значительно влиять на отражённый от БПЛА сигнал. И настройка на обнаружение объектов с определёнными характеристиками является бесперспективным подходом, серьёзно ограничивающим количество потенциальных целей.
Низкотехнологичные БПЛА характеризуются низкой стоимостью производства и эксплуатации, поэтому их применение имеет относительно небольшую ценность. Это позволяет им выполнять сложные задачи, оставаясь незамеченными, или использовать другие беспилотники без риска их безвозвратной потери.
Например, использовать дроны, как постановщик помех или как ложные цели. Это можно организовать, закрепив специальные отражатели на корпусе БПЛА, или установить особый передатчик, способный имитировать отражённый сигнал от определённых целей. В результате этого истинная работа беспилотника скрывается, а другие аппараты оказываются под защитой, так как внимание средств обнаружения и противодействия отвлекается на него. Или просто, подавляет свою маломощную радиосигнатуру.
Актуальная классификация.
Выше были обозначены общие факторы, которые затрудняют обнаружение БПЛА. Однако стоит учесть, что речь идёт о разных типах беспилотников, отличающихся характеристиками, спецификой применения и конструкцией. Необходимо составить общее представление о БПЛА и определить параметры (лётные, конструктивные и другие), которым соответствуют аппараты, вызывающие наибольшие сложности при обнаружении с помощью РЛС.
В открытых источниках существует несколько различных классификаций БПЛА. Беспилотники делятся по конструктивным особенностям, сфере применения и лётным параметрам (взлётной массе, дальности и так далее). Большинство классификаций даёт лишь общее представление и не учитывает всё многообразие существующих моделей. Из-за этого возникает неправильное понимание областей применения отдельных категорий беспилотников. Наиболее полная классификация БПЛА по лётным параметрам представлена в таблице 2, Международной ассоциации беспилотных летательных систем. Эта классификация актуальна для современных моделей беспилотников. Однако могут встречаться уникальные образцы со специфическими характеристиками, которые трудно отнести к определённой категории [1, 7].
Таблица 2. Классификация БПЛА по международной ассоциации по беспилотным летательным системам
|
класс БПЛА |
обозначение |
Наименование |
взлётный вес, кг |
радиус действия, км |
предельная высота, км |
время полёта, ч |
|
малый |
и |
нано |
до 0,25 |
до 1 |
0,1 |
< 1 |
|
μ |
микро |
до 5 |
до 10 |
3 |
1 |
|
|
mini |
мини |
до 25 |
10-40 |
3 |
< 4 |
|
|
легкий |
CR |
ближнего действия класс 1 |
25-50 |
25-70 |
3 |
2-4 |
|
ближнего действия класс 2 |
50-150 |
50-100 |
3 |
<6 |
||
|
средний |
SR |
малой дальности |
до 200 |
до 150 |
4 |
6-8 |
|
MR |
средней дальности |
до 500 |
200 |
5 |
10-12 |
|
|
MRE |
средний дальности с долгим полётом |
500 |
500 |
8 |
10-18 |
|
|
LADP |
маловысотный большой дальности |
до 250 |
более 250 |
до 4 |
1.5-2 |
|
|
тяжёлый |
LALE |
маловысотный большой дальности с долгим полётом |
до 250 |
более 500 |
4 |
18 |
|
MALE |
средневысотный большой дальности с долгим полётом |
до 1000 |
более 1000 |
8 |
24 |
|
|
HALE |
высотный большой дальности с долгим полётом |
до 2500 |
более 4000 |
20 |
>24 |
Была проведена оценка количества существующих разработок БПЛА. Их распределение неравномерно среди представленных классификаций, как показано на рисунке 4.
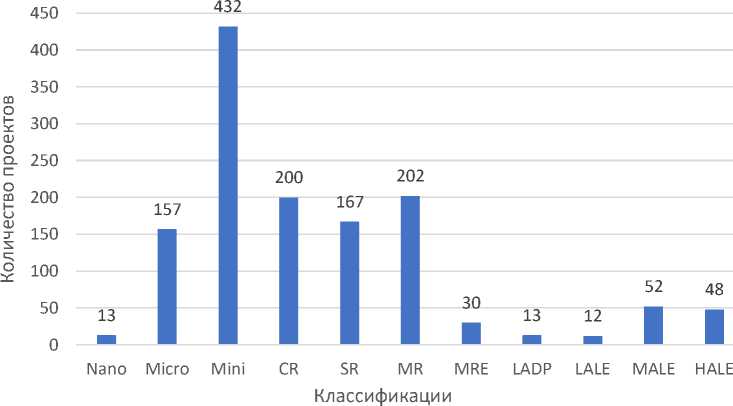
Рис. 4. Распределение проектов БПЛА по разным классам [8]
Проще описать разнообразие БПЛА по количеству следующим образом, имеются: малые, лёгкие, средне-лёгкие и все остальные, так как их общее количество составляет более 88 % всех разработок. Однако даже в пределах трёх указанных категорий наибольшее количество приходится на ка- тегорию «мини». Это обусловлено несколькими факторами: возможностью создания с использованием менее технологичных решений, простотой использования, доступностью для потребительского рынка и универсальностью применения. Сложившаяся ситуация стимулирует раз- работку именно таких моделей беспилотников. Они отличаются небольшими размерами и взлётной массой, но обладают хорошими лётными характеристиками для выполнения сложных задач. Таким обра- зом, можно предположить, что именно такие БПЛА чаще всего используются в реальных условиях [8].
Выводы.
В данной работе были проанализированы особенности сложных радиолокационных целей, к которым относятся БПЛА. Были описаны ключевые факторы, влияющие на сложность обнаружения этих це- лей. Представлена актуальная классификация БПЛА и оценка их распределение по количеству разработок, что позволяет определить приблизительные характеристики наиболее актуальных целей, часто встречающихся в реальных условиях. Видно, что преобладают малогабаритные БПЛА с соответствующими лётнотехническими характеристиками: взлётный вес до 25 кг; радиус действия до 40 км; «потолок» полёта до 3 км; время полёта до 4 часов. Их трудно распознать с помощью средств РЛС.
Список литературы Анализ БПЛА, как актуальных радиолокационных целей, и их маскирующих факторов
- Макаренко С.И. Противодействие беспилотным летательным аппаратом. Монография. - СПб.: Наукоемкие технологии, 2020. - 204 с.
- Христенко А.В. Обнаружение низколетящих малоразмерных целей методом фоновой радиолокации: дис. канд тех. наук: 05.12.14 - "Радиолокация и радионавигация". - Томск, 2019. - 168 с.
- Сперанский В.С. Радиолокация, радиолокационные системы и устройства. - М.: Брис-М, - 2011 - 257 с., 83.
- Парнес М. Расчет эффективной поверхности рассеяния малых объектов // СВЧ-Электроника. - 2017. - №2. - С. 62-64.
- Траектории БПЛА // Flectone. - [Электронный ресурс]. - Режим доступа: https://flectone.ru/traektoriya-bpla.html (дата обращения: 20.01.2024).
- Щербинин В.В., Свиязов А.В., Смирнов С.В., Кветкин Г.А. Автономный навигационный комплекс для роботизированных наземных и летательных аппаратов // Известия Южного федерального университета. Технические науки. - 2014. - № 3 (152). - С. 234-243.
- Классификация БПЛА по летным характеристикам // Геоскан пионер. - [Электронный ресурс]. - Режим доступа: URL:https://docs.geoscan.ru/pioneer/database/const-module/classification/classification.html (дата обращения: 13.01.2024).
- Карпович А.В., Чернышев Ю.М. Выполнение огневых задач с беспилотным летательным аппаратом типа квадрокоптер. - 2022. - 104 с.
