Анализ математической модели кольцевой роторной печи

Автор: Минкина Татьяна Владимировна
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Физико-математические науки
Статья в выпуске: 1 (44) т.10, 2010 года.
Бесплатный доступ
Описана дискретная модель температурных полей кольцевой роторной печи. Составлена компьютерная программа для расчёта тепловых процессов и построена передаточная матрица рассматриваемого объекта. С помощью спектров Гершгорина исследованы характеристики передаточной матрицы тепловых полей рассматриваемой печи как объекта управления.
Дискретная модель, передаточная матрица, диагональная доминантность
Короткий адрес: https://sciup.org/14249325
IDR: 14249325 | УДК: 681.536
Mathematic model's analysis of circular rotor stove
The discrete model of the temperature levels of circular rotor stove is described. The computer program for calculation of thermal processes is made on the basis of the model. According to the results of calculations the transmission matrix of the examined object is got and the spectrum of Gershgorina of thermal fields of the considered furnace as object of management is investigated.
Текст научной статьи Анализ математической модели кольцевой роторной печи
Кольцевая роторная печь (рис.1), как показывают расчёты, является более энергосберегающей по сравнению с традиционными печами, применяемыми для производства 1 т извести. Основная задача технологического процесса заключается в термической обработке исходного материала (щебня), перемещаемого вдоль печи специальным устройством.
Рис.1. Схема объекта управления: 1 – вход и выход камеры; 2 – форсунки; 3 – датчики, измеряющие температуру в камере; 4 – кирпичная кладка; 5 – теплоизоляционная обмазка; D – диаметр наружной стенки кирпичной кладки; Θ 1 , X 1 , X 2 , X 3 , Y 1 , Y 2 , Y 3 – геометрические размеры печи
Температурное поле в печи должно соответствовать технологическим условиям обработки щебня. В связи с этим задача проектирования системы управления температурным полем печи приобретает особую важность.
Постановка задачи . Для проектирования системы управления температурным полем кольцевой роторной печи необходимо решить следующие задачи:
-
- описать математическую модель температурных полей кольцевой роторной печи;
-
- построить передаточную матрицу объекта управления, связывающую вектор входных воздействий (тепловые потоки форсунок) и вектор функций выхода (температуру в точках установки датчиков);
-
- рассмотреть возможные методы синтеза системы управления температурным полем рассматриваемого объекта;
-
- синтезировать систему управления.
Рассмотрим решение первых трех задач.
При разработке дискретной модели температурных полей кольцевой роторной печи сделаем следующие допущения:
-
- будем полагать, что температура на входе и выходе камеры 1 поддерживается постоянной; датчики измерения температуры 3 расположены внутри печи в точках X 1 -X 3 , Y=Y 2 , Θ дi ( i= 1,…, 5);
-
- нижняя часть нагревательной камеры и боковые поверхности теплоизолированы; щебень рассыпан равномерно по дну печи;
-
- скорость движения щебня в нагревательной камере 0,0222 м/мин;
-
- управляющим (входным) воздействием служит тепловой поток, вырабатываемый путём сжигания природного газа в форсунках 2, а его плотность вычисляется по формуле Q i =P i /X 3 Y 4 , P i – мощность, выделяемая i- й форсункой.
Геометрические параметры рассматриваемой печи: D= 9,88 м; X 1 = 1,40 м ; X 2 = 0,20 м; X 3 = 0,20 м; X 4 = 0,30 м; Y 2 = 0,4 м; Y 3 = 0,15 м; Y 4 = 0,8 м; Θ 1 =300 .
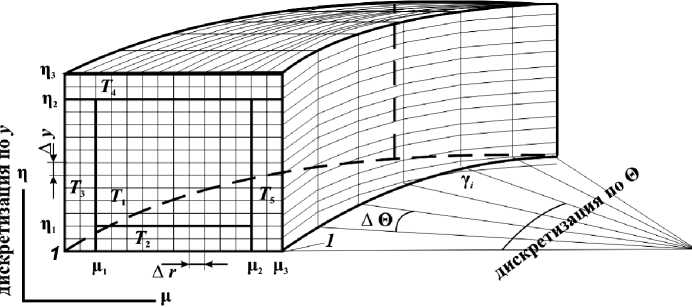
Дискретная модель. Схема дискретизации математической модели [1] рассматриваемого объекта управления приведена на рис. 2. В рассматриваемой задаче будем полагать, что по выбранной координате шаг дискретизации остается постоянным.
дискретизация по г
Рис. 2. Схема дискретизации математической модели объекта управления:
T 1 –T 5 – температурные поля различных сред; μ – точки дискретизации по радиусу ( D/ 2) (μ=1,…, μ 3 );
∆r – шаг дискретизации по радиусу r ; η – точки дискретизации по координате y (η=1,…, η 3 );
∆y – шаг дискретизации по y ; γ – точки дискретизации по Θ (γ=1,…, γ k ); ∆Θ – шаг дискретизации по Θ
Согласно приведённой схеме дискретизации, математическая модель объекта управления в дискретном виде записывается следующим соотношением [1]:
Дт а ( i *- 1, n,Y i ,™ + 1^ +1 .n.Y
Л Ar2
1 Т . -Т
AT i MY
+ i ^Чпу i .wi.y +
D/2-Лтц ArТ , -ТГ +7: , 1 Г ,-2Т +г
i ,№1,Y i ,№Y i ,W1,Y + i ,№Y - 1 i ,№Y i ,ЦЛ,У + 1 -
Ay2 D/2-Ari A02
где At - шаг дискретизации по времени; a i - коэффициент температуропроводности i-й среды,
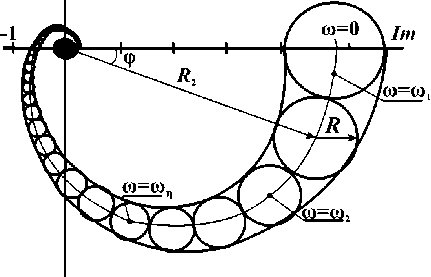
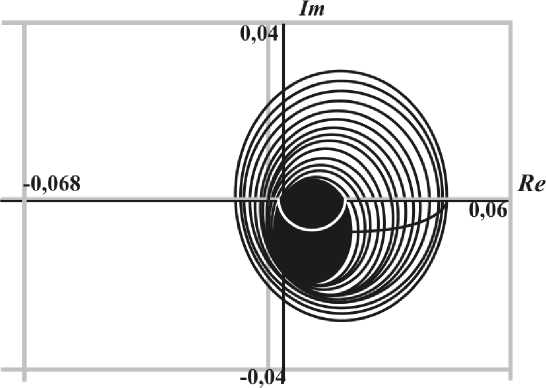
X ai = —; с - теплоемкость; X i - коэффициент теплопроводности; y — плотность, 1 Рис. 3. Схема дискретизации функций выхода Дискретные аналоги граничных условий [2] отражают неразрывность температур и температурных полей на границах раздела сред. Для фазовой переменной Т1 они могут быть записаны в виде следующих соотношений X1 г -т . 1,^1,1,Y 1,^1+1,1,Y Δr — X3 3,Ц1-l,n,Y l,^i,1,Y . ; η1<η<η2, 1<γ<γk; X1 1,^2,1,Y ^“ Г . 1,Ц2 +1,1,Y Δr — Х5 1,^2,n,Y 52Ц2+1>1^. ; η1<η<η2, 1<γ<γk; Г -Т ., -Т ^ntT 1,M2-1,Y _ л 4,Ц,П2+1,Y ' 1 л = Х4л Δy Δy μ1<μ<μ2, 1<γ<γk; 1,Ц,П1 +1,Y 1,кП1,У _; 1,Н,П1,Г 2,Ц,П1 -1,Y . '1 — ^9 ; Δy Δy μ1<μ<μ2, 1<γ<γk, где λ1– коэффициент теплопроводности первой среды. Аналогичными соотношениями записываются граничные условия и для других фазовых переменных: T^i— 0; T^п — о; м=1мз,n=iпз. ,μ,η, ,μ,η,γk Дискретный аналог входного воздействия Qi, (i=1,…, 5) на объект управления (см.рис.3) записывается в виде следующих соотношений: - Т λ 1,μ1,η, γ - 1,Ц1 + 1,ПЛ A r — Qj, η1<η<η2, γj<γ<γj+1; j=1,…, 5, где Qj – тепловой поток, выделяемый j-й форсункой (j=1,…, 5). Функцией выхода служат значения температурного поля в точках установки датчиков Тi,μdi, ηdi, γdi (μdi,ηdi,γdi (i=1,…, 5) – координаты точек установки датчиков) (рис.3), Qj – количество теплоты, выделяемое j-й форсункой (j=1,…, 5). При моделировании объекта были использованы следующие значения геометрических и физических параметров: D=9,7; X1=1,42; X2=0,22; X3=0,4; Y1=0,8; Y2=0,4; Y3=0,12; Y4=0,8; μ1=3; μ2=15; μ3=17; η1=3; η2=14; η3=18; ∆r=0,1; ∆y=0,06; Θ=2,50;γk=120; γ1=23, γ2=25, γ3=41, γ 4=43, γ5=59, γ6=61, γ7=77, γ 8=79, γ9=95, γ10=97; di=14, ηdi=8, (i=1,…,5); γd1=8, γd2=26, γd3=44, γd4=62, γd5=90. Q=1000W a1=0,014 – воздух; a2=0,016 – кирпич; a3=0,008 – щебень; ld1=18 – воздух; ld2=23 – кирпич; ld3=20 – щебень; V=0,00037 – м/с. По результатам расчетов получена передаточная матрица W рассматриваемого объекта, связывающая вектор входных воздействий (тепловые потоки форсунок) и вектор функций выхода (температуру в точках установки датчиков): 0,015e-70S 2060S+1 0,051e-ios 2380S+1 0,042e-bos 5140S+1 0,0315 -380S e 7440S+1 0,016 -1100S e .8600S+1 0,0125 0,0095 0,0065 0,004 -1700S e 90S e 550S e 000S e 700S 5020S+1 6900S+1 840OS+1 860OS+1 0,050 0,0385 0,0265 0,0155 -Ю305 e 70S e 0S e 5 0S --------e 4460S+1 6920S+1 8520S+1 8940S+1 0,0765 -12s 0,068 s 0,0465 -250S 0,027 6. 4276S+1 5880S+1 770OS+1 820OS+1 0,059 e-13os 0,083 e-8s 0,067 e-50S 0,039 e-250S 6740S+1 4984S+1 570OS+1 680OS+1 0,030 e-560S 0,042 e-240S 0,0555 e_50s 0,056 e-7s 8480S+1 6920S+1 470OS+1 e 2486S+1 Выделим два сложившихся в настоящее время подхода для построения замкнутых систем управления рассматриваемым объектом, передаточная матрица которого приведена выше: решение методами сосредоточенных систем и решение методами систем с распределёнными парамет- рами. Решение методами сосредоточенных систем основывается на свойстве диагональной до- минантности передаточных матриц объекта управления [2,3]. Положим, что в результате экспе- Re Рис.4. Построение спектра Гершгорина: ωη – заданные значения круговой частоты ω; φ=arctg(Im(Wi,i(jω)/Re(Wi,i(jω)), R2=[(Im(Wi,i(jω))2+Re(Wi,i(jω))2]1/2; m R= £ [(Im(W,j))2 +RW)№ j=1, j * i i, j=1, 2,..., m, mx m - размерность матрицы W риментальных исследований получена передаточная матрица, связывающая j-й вход с i-м выходом: W(5) = ^,7- (^)]. Исследуем полученную передаточную матрицу. Полагая s=jω, где ω – круговая частота, определим модули и фазы элементов матрицы W. Если модули диагональных элементов матрицы W намного больше суммы модулей остальных элементов соответствующей строки, то матрица W обладает свойством диагональной доминантности [3]. Исследование диагональной доминантности может быть осуществлено с помощью спектров Гершго-рина для заданной передаточной матрицы. При этом для каждого значения ω= ωη могут быть построены круги Гершгорина, объединяя которые, получим спектр Гершгорина (спектр Гершгорина, построенный для i-й строки диагонально-доминантной матрицы, приведен на рис. 4). Для диагонально-доминантных матриц разработана частотная методика синтеза многомерных систем управления [3]. В рассматриваемой задаче диагональная доминантность отражает взаимовлияние j-го входного воздействия на i-й выход. На рис.5 показан спектр Гершгорина для первой строки передаточной матрицы рассматриваемого объекта (W). Аналогично могут быть построены спектры Гершгорина и для остальных строк матрицы. Рис. 5. Спектр Гершгорина для первой строки матрицы W Выводы. В рассматриваемой статье описана дискретная модель температурных полей кольцевой роторной печи и построена передаточная матрица рассматриваемого объекта. С помощью спектров Гершгорина исследованы характеристики передаточной матрицы. Результаты расчётов показали, что передаточная матрица рассматриваемого объекта не обладает свойством диагональной доминантности, т.е. взаимосвязи между j-м входным воздействием и i-й функцией выхода достаточно существенны, и их нельзя не учитывать. Следовательно, методика синтеза регуляторов многомерных систем управления, опирающаяся на диагональную доминантность передаточной матрицы объекта управления, не может быть использована. В рассматриваемом случае может быть использована методика синтеза систем с распределёнными параметрами, описанная в [4].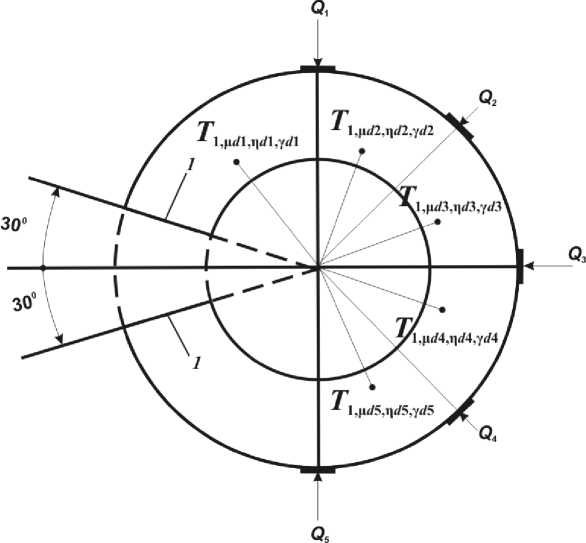
Список литературы Анализ математической модели кольцевой роторной печи
- Минкина Т.В. Математическая модель кольцевой роторной печи/Т.В. Минкина//Управление и информационные технологии: межвуз. науч. сб. -Пятигорск, 2008. -С.121-128.
- Воронов А.А. Основы теории автоматического управления/А.А. Воронов//Автоматическое регулирование непрерывных линейных систем. -М.: Энергия, 1980. -309 с.
- Солодовников В.В. Частотный метод анализа и синтеза многомерных систем автоматического управления: учеб. пособие/В.В. Солодовников, Н.А. Чулин. -М.: Высшая школа, 1981. -46 с.
- Малков А.В. Синтез распределенных регуляторов для систем управления гидролитосферными процессами/А.В. Малков, И.М. Першин.-М.: Научный мир, 2007. -252 с.
