Анализ статистики ускоренного построения орбитальной системы координат транспортных пилотируемых и грузовых кораблей и методы повышения точности

Автор: Сумароков Антон Владимирович, Борисенко Юрий Николаевич, Борисенко Николай Юрьевич, Платонов Валерий Николаевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 2 (21), 2018 года.
Бесплатный доступ
Рассматриваются результаты использования алгоритма ускоренного построения орбитальной системы координат в рамках летно-конструкторских испытаний транспортных пилотируемых и грузовых кораблей серий «Союз МС» и «Прогресс МС». Алгоритм ускоренного построения орбитальной ориентации, примененный в системе управления движением и навигации этих кораблей, основан на знании предполагаемой ориентации корабля в момент отделения от ракеты-носителя и угловой скорости его вращения в момент появления готовности измерителей угловой скорости. На основе телеметрической информации, полученной за год, прошедший с момента начала применения данного алгоритма, анализируется точность построения ориентации, и приводятся средние ошибки определения ориентации предложенным способом. Дополнительно на основе анализа полученных результатов приводятся методы повышения точности прогноза.
Транспортные пилотируемые корабли "союз мс", грузовые корабли "прогресс мс", построение орбитальной системы координат, система управления движением и навигации
Короткий адрес: https://sciup.org/143166673
IDR: 143166673 | УДК: 531.551:681.5.01
Statistical analysis of accellerated construction of orbital reference frame for manned and cargo transport spacecraft and accuracy increase methods
Consideration is given to the results of using an accelerated construction algorithm for manned and cargo transport spacecraft Soyuz MS and Progress MS orbital reference frame. An accelerated orbital reference frame construction algorithm applied in the spacecraft motion control and navigation system is based on the knowledge of the anticipated spacecraft attitude at separation from the launch vehicle and its angular spin rate upon readiness of the angular rate sensors. Based on the telemetry information received for the year of using this algorithm, a precision of establishing the orbital attitude is analyzed, and average errors of attitude determination by the proposed method are provided. Additionally, based on the analysis results methods of increasing the attitude prediction accuracy are presented.
Текст научной статьи Анализ статистики ускоренного построения орбитальной системы координат транспортных пилотируемых и грузовых кораблей и методы повышения точности
В настоящее время при запусках транспортных пилотируемых кораблей (ТПК) «Союз МС» и транспортных грузовых кораблей (ТГК) «Прогресс МС» к Международной космической станции широко применяется баллистическая схема ускоренной стыковки за ~4 витка орбиты [1]. Для сокращения времени этапа построения орбитальной ориентации сразу после выведения и отделения корабля от третьей ступени ракетоносителя применяется алгоритм ускоренного построения орбитальной системы координат (ОСК) [2–4]. Для оценки углов ориентации связанного базиса космического аппарата относительно орбитального [5] в данном алгоритме используются априорная информация об ориентации ракеты-носителя в момент разделения, а также измерения угловой скорости, полученные через несколько минут после разделения.
Использование алгоритма ускоренного построения орбитальной ориентации имеет ряд преимуществ по сравнению с традиционным алгоритмом построения ориентации [6, 7] с использованием датчика инфракрасной вертикали (ИКВ). В частности, ввиду особенностей расположения на корпусе корабля, именно при нахождении осей связанного базиса корабля вблизи осей орбитальной системы координат достигается наиболее эффективная работа антенн как аппаратуры спутниковой навигации, позволяющей получать информацию о положении корабля в пространстве с использованием сигналов спутниковых систем GPS и ГЛОНАСС, так и единой контрольнотелеметрической системы, позволяющей передавать телеметрическую информацию и принимать управляющие команды через систему спутников-ретрансляторов «Луч». Угловая скорость корабля при этом не должна превышать 0,1 °/с. Следовательно, чем скорее после завершения участка выведения будет обеспечено совмещение связанного и орбитального базисов, тем скорее будут получены измерения вектора состояния и параметры орбиты космического аппарата, а также обеспечена связь со спутниками системы «Луч». Использование алгоритма ускоренного построения ОСК позволяет сразу после начала работы системы управления и навигации корабля спрогнозировать его положение относительно орбитального базиса и далее в течение нескольких десятков секунд развернуть корабль таким образом, чтобы его связанный базис стал близок к положению ОСК. Дополнительно следует также отметить, что для дальнейшего уменьшения времени между пуском и стыковкой к станции [8] крайне важно быстро определять орбиту выведения и формировать заданную ориентацию корабля к моменту выдачи корректирующего импульса.
В данной статье обсуждаются точности и величина ошибок прогноза, полученная при применении алгоритма ускоренного построения ориентации. Данный алгоритм был интегрирован в состав бортового программного обеспечения системы управления движением и навигации ТПК «Союз МС» и ТГК «Прогресс МС». Впервые верификация разработанного алгоритма ускоренного построения ОСК была проведена на корабле «Союз МС-03», отправившемся в полет к Международной космической станции в ноябре 2016 г. С тех пор было проведено семь пусков с построением начальной ориентации при помощи данного алгоритма. На основе статистической информации, полученной в ходе анализа телеметрических данных, приводятся методы повышения точности прогноза начальной ориентации.
Циклограмма алгоритма ускоренного построения начальной ориентации
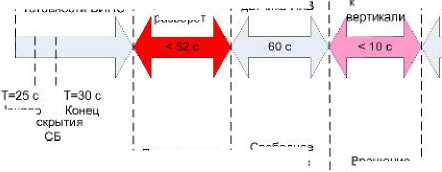
В отличие от алгоритма построения начальной ориентации с использованием только показаний датчика ИКВ, в алгоритме ускоренного построения орбитальной ориентации добавляется этап прогнозирования и разворота в прогнозируемую ОСК [2]. Циклограмма режима с использованием ускоренного построения ориентации представлена на рис. 1. Ввиду того, что при прогнозировании ориентации корабля относительно ОСК используется бортовая эталонная модель свободного движения космического аппарата [9, 10], при прогнозировании неизбежно возникают ошибки, обусловленные действием возмущающих моментов как в процессе разделения, так и в процессе свободного движения. Дополнительное влияние оказывает изменение массовоинерционных характеристик корабля в процессе раскрытия элементов конструкции.
Событие:
Тип углового движения:
I Набор точностной I готовности БИНС
Приведение к местной
Контакт отделения
Включение датчика ИКВ
Прогноз ОС К и программный разворот
Т>120с Включение ДУС
Операция:
Начало
Вращение со скоростью 0,75 град/с
Программное вращение со скоростью 3.5 град/с
Свободное вращение с угловыми скоростями возникшими при разделении с РН
Свободное вращение с угловыми скоростями близким к нулю
। Подстройка
। (уточнение местной вертикали)
550sTs632 с
Получение признака «Готовность системы
120-180 с
Программный разворот по рысканью за 2 минуты
Поддержание местной вертикали (вращение с орбитальной угловой скоростью)
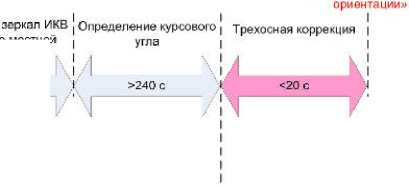
Рис. 1. Циклограмма ускоренного построения орбитальной системы координат
В табл. 1 представлены данные по статистике каждого этапа построения начальной ориентации, полученные из анализа телеметрической информации в ходе полета ТПК «Союз МС-03» (№ 733, пуск состоялся 17.11.2016 г.), «Союз МС-04» (№ 734, пуск состоялся 19.04.2017 г.), «Союз МС-05» (№ 735, пуск состоялся 28.07.2017 г.) и «Союз МС-06» (№ 736, пуск состоялся 13.09.2017 г.), а также
ТГК «Прогресс МС-05» (№ 435, пуск состоялся 22.02.2017 г.), «Прогресс МС-06» (№ 436, пуск состоялся 14.06.2017 г.), «Прогресс МС-07» (№ 437, пуск состоялся 14.10.2017 г.).
Данные табл. 1 показывают, что суммарное время, затрачиваемое на процесс определения и разворота корабля в необходимую ориентацию, составляет в среднем ~630 c, что позволяет получать признак готовности системы ориентации до окончания зоны связи с кораблем через наземные измерительные пункты, длительность которой с момента разделения составляет ~11 мин. При этом в среднем уже через ~33 с после появления готовности измерений датчиков угловой скорости корабль оказывается развернут в ориентацию, близкую к необходимой, что позволяет в полной мере использовать возможности аппаратуры спутниковой навигации. Для сравнения с ранее использовавшимся алгоритмом построения начальной ориентации, основывавшемся только на измерениях ИКВ [6], была проанализирована телеметрическая информация, полученная в ходе полета ТПК «Союз ТМА-20М» (№ 720, пуск состоялся 19.03.2016 г.), «Союз МС-01» (№ 731, пуск состоялся 07.07.2016 г.), «Союз МС-02» (№ 732, пуск состоялся 19.10.2016 г.) и ТГК «Прогресс МС-03» (№ 433, пуск состоялся 17.07.2016 г.). На всех этих кораблях сигнал готовности системы ориентации был получен уже после окончания зоны связи, и точное время его появления неизвестно, однако оценка времени его появления может быть получена путем прибавки ~360 c ко времени начала этапа определения курсового угла. Среднее время начала этапа определения курсового угла составляет ~410,7 с от формирования сигнала «Контакт отделения», что дает приблизительную оценку длительности построения начальной ориентации в среднем ~770 c. Таким образом, дополнительно следует отметить, что выигрыш по времени по сравнению с использовавшимся ранее алгоритмом составляет >2 мин (ранее формирование сигнала готовности системы ориентации происходило уже вне зоны видимости наземных измерительных пунктов).
Точность прогнозирования положения орбитальной системы координат и методы ее улучшения
Ключевым вопросом остается точность прогнозирования кватерниона разворота в ОСК. К сожалению, для оценки точности прогноза нет никаких объективных данных о реальной ориентации аппарата относительно ОСК на момент окончания разворота по прогнозу. Можно лишь использовать косвенные методы оценки данной точности.
В качестве косвенных данных, имеющихся на борту для оценки точности прогноза кватерниона разворота из связанного базиса на момент появления готовности датчиков угловой скорости TSINS к ориентации ОСК на подъем орбиты, выступают интегралы от угловых скоростей корабля B ( t ).
Таблица 1
Длительности этапов построения орбитальной системы координат
|
Наименование этапа |
№ 733 |
№ 435 |
№ 734 |
№ 436 |
№ 735 |
№ 736 |
№ 437 |
Среднее |
|
Время формирования сигнала |
23:29: |
09:07: |
10:22: |
12:29: |
18:50: |
00:25: |
11:55: |
|
|
«Контакт отделения» |
02.6 |
23.6 |
32.6 |
01.9 |
00.6 |
52.4 |
43.2 |
|
|
Длительность подготовительных операций, с |
168 |
129,2 |
157,8 |
129,4 |
160,6 |
170 |
129,4 |
149,2 |
|
Прогноз ориентации и программный разворот, с |
36,4 |
37,4 |
32,6 |
36,4 |
27,2 |
26 |
36,4 |
33,2 |
|
Включение датчика ИКВ, с |
60,6 |
59,8 |
60,6 |
59,9 |
60,6 |
61 |
60,4 |
60,4 |
|
Приведение к местной вертикали, с |
2,8 |
7,4 |
5,4 |
5,6 |
3,4 |
3,6 |
4,6 |
4,7 |
|
Подстройка зеркал ИКВ, с |
129,2 |
129,2 |
123,6 |
164,6 |
124,2 |
129,8 |
157,4 |
133,4 |
|
Определение курсового угла и программный разворот в ОСК, с |
336,4 |
236,8 |
220,6 |
233 |
215,8 |
237,8 |
233,6 |
244,9 |
|
Время появления готовности |
23:41: |
09:17: |
10:32: |
12:39: |
19:00: |
00:36: |
12:06: |
|
|
системы ориентации |
16.0 |
22.8 |
33.2 |
30.8 |
10.2 |
20.6 |
05.0 |
|
|
Суммарное время, затраченное на построение ориентации, с |
733,4 |
599,2 |
600,6 |
628,9 |
609,6 |
628,2 |
621,8 |
631,7 |
Интегрирование в бортовых алгоритмах осуществляется в кватернионной форме [11] и начинается в момент появления первых измерений угловой скорости TSINS. Так как процесс интегрирования начинается с единичного кватерниона, то назовем базис, в котором осуществляется интегрирование, базисом бесплат-форменной инерциальной навигационной системы (БИНС). К сожалению, сами интегралы не позволяют непосредственно вычислить ошибки прогнозирования ввиду наличия угловой скорости вращения самой ОСК, однако указанные ошибки могут быть получены путем обработки данных, если воспользоваться следующими соображениями:
-
• в момент получения признака готовности системы ориентации TACR базисы ОСК и базис, в котором осуществляется интегрирование угловой скорости, начинают совпадать с точностью до ошибок стабилизации;
-
• базис ОСК вращается вокруг оси Oz' с угловой скоростью орбитального движения.
Вращение орбитального базиса за время A t можно представить с помощью следующего кватерниона:
A L (A t ) = (cos(0,5w orb A t ) 0 0 sin(0,5ro orb A t )). (1)
Таким образом, если взять значение интеграла от угловых скоростей в момент TACR или позже (принимая во внимание (1)), можно спрогнозировать кватернион перехода от базиса БИНС к орбитальному базису следующим образом:
Q = B ( T ACR ) ^ A L ( t — T acr ). (2)
Следовательно, ошибка ориентации корабля относительно ОСК может быть получена из интеграла от угловых скоростей и выражения (2):
N ( t ) = B ( t ) ◦ Q . (3)
На рис. 2 представлены данные, обработанные с использованием выражений (2), (3) от момента TSINS до TACR для различных кораблей в процессе построения ОСК. На рис. 3 представлены данные, обработанные с использованием выражений (2), (3), в момент окончания разворота в прогнозируемую ориентацию. В качестве нулевого момента времени для графиков на рис. 2, 3 выбран момент появления готовности датчиков угловой скорости.
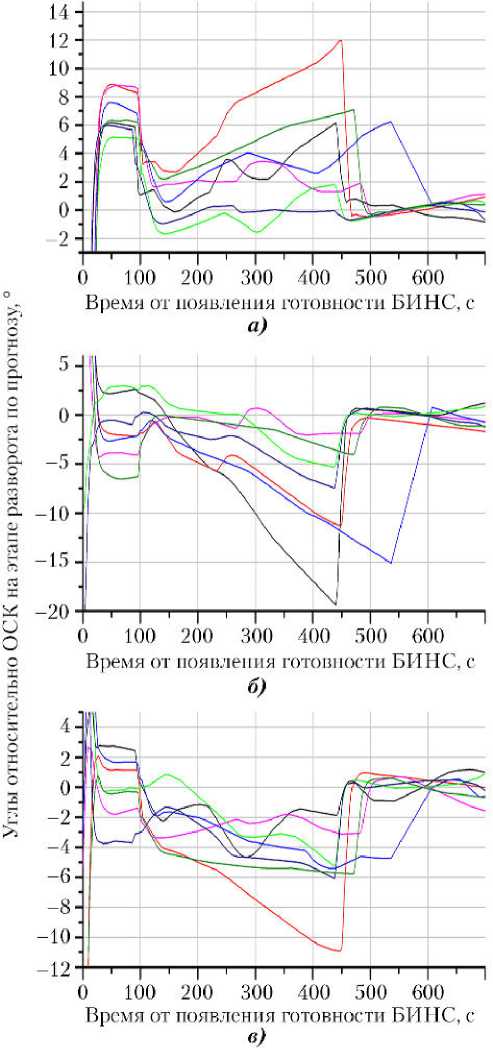
Рис. 2. Поведение ошибок ориентации в процессе построения орбитальной системы координат (ОСК): а — крен;
б — рысканье; в — тангаж
Как видно из рис. 3, сразу после разворота по прогнозу ошибки определения ориентации находятся в диапазонах по крену +5^+9°; по рысканью — -6^+3°; по тангажу — -4^+3°. После уточнения ориентации по измерениям датчика местной вертикали ошибки по крену и тангажу были сведены к нулевым значениям. Дополнительно следует отметить, что величина ошибок ориентации косвенно подтверждалась изображением с видеокамеры, которая включается по началу работы системы управления движением и навигации на грузовых кораблях «Прогресс МС». Видеокамера на данных кораблях установлена параллельно продольной оси корабля и направлена по направлению полета, поэтому на изображении, полученном с нее, по наклону горизонта Земли был четко виден небольшой угол рассогласования по крену.
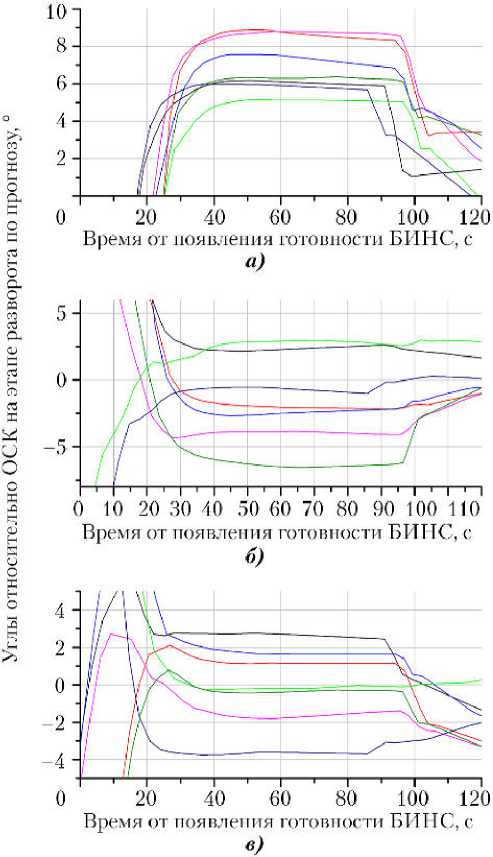
Рис. 3. Поведение ошибок ориентации в момент окончания разворота в прогнозируемую орбитальную систему координат (ОСК): а — крен; б — рысканье; в — тангаж
Нарастающий характер ошибок в процессе построения ориентации на рис. 3 объясняется работой фильтра, описанного в работе [12] и оценивающего ошибку углового рассогласования в канале рысканья, когда отсутствует управление по некоторым направлениям. После определения курсового угла эти ошибки были выявлены и далее скомпенсированы. Модернизация данного фильтра является предметом дальнейших доработок алгоритма построения начальной ориентации. Однако, несмотря на эти обстоятельства, результаты летноконструкторских испытаний показывают, что использование предлагаемого алгоритма позволяет значительно ускорить процесс построения ОСК и после выведения оперативно получать на борту информацию о параметрах орбиты корабля.
При анализе ошибок ориентации отдельно следует остановиться на ошибке разворота в прогнозируемое положение ОСК в канале крена. В табл. 2 представлены данные по параметрам разворота и ошибкам прогноза положения ОСК для вышеуказанных космических кораблей, на которых применялся алгоритм ускоренного построения ориентации. Данные табл. 2 и рис. 2, 3 показывают, что ошибка прогноза в канале крена имеет ярко выраженную систематическую составляющую. Объяснение наличия систематической ошибки может быть дано, если воспользоваться следующими соображениями. Из представленных данных видно, что после разделения корабль оказывается закручен с угловой скоростью ~0,8 °/с, причем наибольшую величину имеет компонента угловой скорости в канале крена. Средние значения скорости закрутки, полученные по данным телеметрии, имеют следующие величины: в канале крена 0,76±0,06 °/с; в канале рысканья 0,01 ±0,15 °/с; в канале тангажа 0,19±0,09 °/с.
Параметры оценки начальной ориентации
Таблица 2
|
Параметр |
№ 733 |
№ 435 |
№ 734 |
№ 436 |
№ 735 |
№ 736 |
№ 437 |
Среднее |
|
Время прогноза, с |
168 |
129 |
158 |
129 |
160 |
170 |
129 |
149±19,2 |
|
Абсолютная угловая скорость на момент включения БИНС, ° /с |
0,75 |
0,76 |
0,91 |
0,78 |
0,81 |
0,79 |
0,77 |
0,80 ±0,06 |
|
Величина угла разворота в прогнозируемую ОСК, ° |
81,1 |
88,0 |
66,1 |
81,2 |
53,4 |
55,3 |
83,6 |
72,7 ± 14,2 |
|
Абсолютная ошибка прогноза ОСК, ° |
8,1 |
9,0 |
7,0 |
9,8 |
6,1 |
6,9 |
9,1 |
8,0 ± 1,3 |
|
Ошибка прогноза ОСК по крену, ° |
7,5 |
8,7 |
6,1 |
8,8 |
5,1 |
5,9 |
6,3 |
6,91 ± 1,44 |
|
Ошибка прогноза ОСК по рысканью, ° |
–2,5 |
–2,1 |
2,2 |
–3,8 |
2,9 |
–0,5 |
–6,5 |
–1,47 ± 3,31 |
|
Ошибка прогноза ОСК по тангажу, ° |
1,6 |
1,1 |
2,7 |
–1,8 |
–1,8 |
–3,6 |
–0,4 |
–0,31 ± 2,23 |
Через 25 с после разделения у корабля начинают раскрываться панели солнечных батарей, процесс их раскрытия занимает ~5 с. За счет раскрытия солнечных батарей в канале крена происходит значительное изменение диагональной компоненты тензора инерции вокруг оси Х . После раскрытия панелей солнечных батарей данная компонента увеличивается на ~18%, в то время как остальные компоненты изменяются в пределах не более 1%. При формировании прогноза ориентации данное обстоятельство никак не учитывается, и для прогнозирования используется тензор инерции с уже раскрытыми панелями солнечных батарей [2]. Таким образом, если воспользоваться законом сохранения кинетического момента, то до раскрытия батарей корабль вращается на ~18% быстрее, чем после того, как произойдет раскрытие. За 30 с эта повышенная скорость вращения приведет к тому, что угол, на который за это время развернется корабль, также увеличится на ~18%. Например, для средней скорости вращения после раскрытия солнечных батарей в канале крена 0,76 °/с угол разворота за время с момента разделения до раскрытия панелей солнечных батарей составит ~22,8°, в реальности же в это время корабль вращается со скоростью 0,9 °/с, что приводит к тому, что реальный угол поворота составляет ~26,9°. Таким образом, в результате корабль оказывается развернут на 4,1° больше прогнозируемого положения.
На рис. 4 представлен процесс вращения корабля, восстановленный по данным телеметрии, полученной в ходе полета ТПК «Союз МС-03». На данном рисунке дугой синего цвета показано свободное вращение корабля от момента разделения до момента раскрытия солнечных батарей. Дугой черного цвета показано свободное вращение корабля от момента раскрытия солнечных батарей до начала управления кораблем при помощи реактивных двигателей. Дугой зеленого цвета показан разворот корабля в прогнозируемое положение орбитальной системы координат. Вектор ω TБИНС обозначает направление угловой скорости вращения корабля, вектор V — направление скорости орбитального движения корабля.
Из рис. 4 видно, что в результате того, что в процессе прогнозирования не учитывается факт вращения корабля с большей скоростью и на больший угол до раскрытия панелей солнечных батарей, алгоритм прогноза считает, что угол разворота был меньше реального, и формирует разворот на угол больший, чем требуется. Это отчетливо наблюдается на рис. 3, а, где на графике поведения угла в канале крена видно, что при развороте корабль систематически проскакивает реальное положение ОСК и стабилизируется с определенной систематической ошибкой.
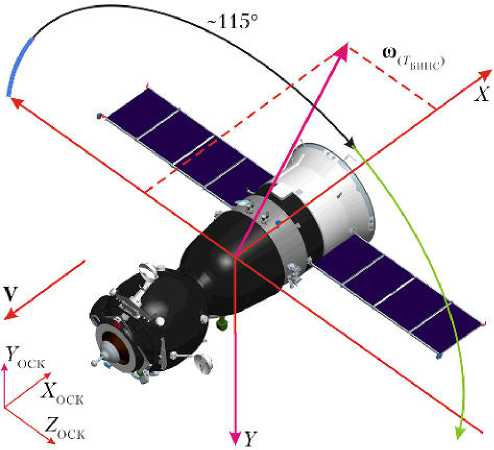
Рис. 4. Процесс вращения корабля
Таким образом, учет изменения тензора инерции при формировании прогноза позволит уменьшить величину систематической ошибки разворота до ~3°. Оставшаяся часть систематической ошибки объясняется воздействием моментов со стороны системы разделения корабля и третьей ступени ракеты-носителя. В результате действия этих моментов после разрыва механических связей корабля и ракеты корабль оказывается развернут относительно ОСК на некоторый небольшой угол, который и дает вклад в ошибки прогноза. Данная ошибка может быть учтена в алгоритме при формировании прогноза положения ОСК относительно текущего положения.
Заключение
В статье была рассмотрена статистика применения алгоритма ускоренного построения ОСК, используемого в системе управления ТПК «Союз МС» и ТГК «Прогресс МС». Алгоритм применяется для сокращения времени на определение текущего значения вектора состояния с помощью аппаратуры спутниковой навигации сразу после выведения корабля на орбиту искусственного спутника Земли и отделения его от ракеты-носителя. Принцип работы предлагаемого алгоритма основан на априорном знании параметров ориентации ракеты-носителя в момент разделения, а также измерений угловой скорости, имеющихся на борту после начала работы бесплатформенной инерциальной навигационной системы. Данные телеметрии, полученные в ходе пусков ряда кораблей «Союз МС» и «Прогресс МС» к Международной космической станции, показывают работоспособность алгоритма ускоренного построения орбитальной ориентации. В статье приведена точность прогнозирования положения ОСК относительно приборного базиса корабля, выявлена природа ошибок ориентации и предложены методы их уменьшения.
Список литературы Анализ статистики ускоренного построения орбитальной системы координат транспортных пилотируемых и грузовых кораблей и методы повышения точности
- Микрин Е.А., Орловский И.В., Брагазин А.Ф., Усков А.В. Новые возможности автономной системы управления модернизированных кораблей «Союз» и «Прогресс» для реализации «быстрой» встречи с МКС//Космическая техника и технологии. 2015. № 4(11). С. 58-67.
- Борисенко Н.Ю., Сумароков А.В. Об ускоренном построении орбитальной ориентации грузовых и транспортных кораблей серий «Союз МС» и «Прогресс МС»//Известия РАН. Теория и системы управления. 2017. № 5, С. 131-141. DOI: 10.7868/S0002338817050110.
- Гладышев А.Д., Сумароков А.В. Алгоритмы оценки параметров движения космического аппарата//Материалы докладов XV конференции молодых ученых «Навигация и управление движением»/Под общ. ред. акад. В.Г. Пешехонова. СПб: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2013. С. 202-209.
- Патент РФ 2568235. Российская Федерация. Способ управления движением космического объекта после отделения от другого космического объекта. Муртазин Р.Ф., Сумароков А.В., Борисенко Ю.Н., Борисенко Н.Ю.; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка RU2014106956/11; приоритет от 26.02.2014 г.//Изобретения. Полезные модели. 2015. № 31.
- Бранец В.Н., Платонов В.Н., Сумароков А.В., Тимаков С.Н. О стабилизации спутника связи, несущего маховики, без использования датчиков углов и угловых скоростей.//Известия РАН. Теория и системы управления. 2008. № 1. С. 127-137.
- Легостаев В.П., Микрин Е.А., Орловский И.В., Борисенко Ю.Н., Платонов В.Н., Евдокимов С.Н. Создание и развитие систем управления движением космических кораблей «Союз» и «Прогресс»: опыт эксплуатации, планируемая модернизация. Сб. статей. М.: МФТИ, 2009. С. 4-13.
- Микрин Е.А., Тимаков С.Н., Сумароков А.В., Богданов К.А., Жирнов А.В., Зыков А.В. Опыт и перспективы создания бортовых алгоритмов управления движением космических аппаратов//Вестник Российского фонда фундаментальных исследований. 2017. № 3(95). С. 23-45.
- Муртазин Р.Ф. Двухвитковая схема сближения космического корабля «Союз» с Международной космической станцией//Космонавтика и ракетостроение. 2017. № 1(94). С. 30-37.
- Сумароков А.В., Тимаков С.Н. Об одной адаптивной системе управления угловым движением спутника связи//Известия РАН. Теория и системы управления. 2008. № 5. С. 131-141.
- Ефимов Д.А., Сумароков А.В., Тимаков С.Н. О гиростабилизации спутника связи в отсутствие измерений угловой скорости//Известия РАН. Теория и системы управления. 2012. № 5. С. 119-128.
- Бранец В.И., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. М.: Наука, 1992. 280 с.
- Бранец В.Н., Севастьянов Н.Н., Федулов Р.В. Лекции по теории систем ориентации, управления движением и навигации. Уч. пос./Под общ. ред. Н.Н. Севастьянова. Томск: Томский государственный университет, 2013. 313 c.
