Анализ устойчивости перевернутого маятника в среде MATLAB /Control System Toolbox

Автор: Петрова Светлана Николаевна, Пирожок Александр Александрович, Игонина Елена Викторовна
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Вопросы прикладной математики
Статья в выпуске: 2, 2012 года.
Бесплатный доступ
В статье рассмотрена динамическая модель перевернутого маятника. Для моделей класса LTI рассмотрены методы, алгоритмы и программы анализа и синтеза систем управления. Линеаризованные уравнения позволяют исследовать рассматриваемые модели на устойчивость.
Короткий адрес: https://sciup.org/14719891
IDR: 14719891 | УДК: 004.3'142.23
Текст научной статьи Анализ устойчивости перевернутого маятника в среде MATLAB /Control System Toolbox
В статье рассмотрена динамическая модель перевернутого маятника. Для моделей класса LTI рассмотрены методы, алгоритмы и программы анализа и синтеза систем управления. Линеаризованные уравнения позволяют исследовать рассматриваемые модели на устойчивость.
Динамические модели перевернутых маятников различной конфигурации часто используются в исследованиях как наглядные примеры неустойчивых объектов, в частности, при сравнении методов синтезаалгоритмов автоматической стабилизации [1 — 10]. Мно гозвенные перевернутые маятники служат упрощенными примерами шагающих роботов, ракет на старте, нескольких барж, которые толкает буксир, ит.д.
Принципиальная схема неустойчивого механического объекта — перевернутого маятника на каретке — изображена на рис. 1.
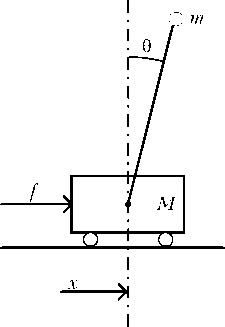
Рис. 1. Принципиальная схема перевернутого маятника на каретке
На рис. 1 приняты следующие обозначения параметров: т — масса маятника, кг; М — масса каретки, кг; / — длина маятника, м, а также переменных: 0(t) — угол отклонения маятника, рад; x(t) — положение каретки, м; f ( t ) — сила, действующая на каретку, Н (кг*м/сек 2 ).
Рассматриваемый механический объект имеет две степени свободы — вращательное движение маятника и поступательное движе ние каретки. Управление таким объектом осложняется тем обстоятельством, что имеется только одно управляющее воздействие — сила f(t), приложенная к каретке.
Кроме того, иногда можно измерять только положение каретки, и нет датчиков угла маятника, нет также датчиков скоростей их изменения. Классические и современные методы синтеза систем автоматического управления основаны на математических моделях в виде дифференциальных или разностных уравнений. Рис. 1 можно интерпретировать
как символьную модель, представленную на языке механики. Для перевода на язык математических моделей используют законы классической механики. Такой способ построения математических моделей называют аналитическим — он возможен для объектов хорошо изученной природы. Примем следующие допущения: массы сосредоточены; отсутствует сопротивление среды; отсутствует трение.
В качестве обобщенных координат для рассматриваемой системы с двумя степенями свободы выберем 6 (t) — угол отклонения маятника и j (t) — положение каретки.
Для записи уравнений динамики механической системы воспользуемся уравнениями Лагранжа второго рода
Выражение для кинетической энергии запишется так:
1 1?
Т = - Мх + - mvA,(2)
где
2 -2-2
г А - зс a + ^ A ;
хА - х + i sin 9; Х a - Х + I cos 99;
/ a — I cos 9; / a - -I sin 99;
г д - Х 2 + 2 Х 9 1 cos 9 + i 292.
С учетом этих выражений вместо (2) получим
Т = 1
ваемого объекта в виде системы двух дифференциальных уравнений второго порядка:
ml2 - mgl sin 9 + ml2 cos 9 - 9; (5)
dt2dt2
d x9
(M + m) —д + ml cos 9 —T -dt22
- ml sin 9 f—)
I dt)
- f-
Уравнения (5) и (6) представляют собой выражения баланса моментов, действующих на маятник, и баланса сил, действующих на каретку.
Если за начало отсчета угла маятника принять нижнее положение равновесия, то в уравнениях (5), (6) изменятся знаки некоторых слагаемых с учетом тождеств: sin ( 9 + л ) - - sin 9; cos ( 9 + л ) - - cos 9.
В результате запишутся несколько иные уравнения:
d 9
ml —д + m g l sin 9 - mi cos 9 — д - 9;
dt2
d xd9
(M + m) —д - ml cos 9 —+ dt22
+ ml sin 9

- f.
(6а)
(6б)
Эти уравнения описывают так называемый козловый кран, в котором роль маятника играет груз на тросе.
Для записи системы дифференциальных уравнений в форме Коши — системы уравнений первого порядка, разрешенных относительно производных, исходные уравнения разрешим относительно старших производных. Заметим, что вторые производные Э, Ji в уравнения (5), (6) входят линейно. С учетом этого, приведем уравнения к матричной форме:
l ml cos 6
■ • cos 6 6
х
М + m х
g sin 6 ml62 sin 6 + f
Прежде всего проверим существование и единственность решения — вычислим определитель матрицы:
D = l ( М + m ) - ml cos2 9 = 1М + + Im sin2 6 * 9
и убедимся в том, что он не равен нулю.
Для решения системы уравнений воспользуемся правилом Крамера:
D
д sin 9 ml9 2 sin 9 + f
cos 9
M + m
ния переменных 0 и 0, когда приближенно можно принять: sin 0 к 0; cos0 к 1; 02 к 0. Пренебрегая малыми величинами высших порядков, вместо нелинейных уравнений (7) получим линейные (линеаризованные) уравнения в символьном виде:
A 0
•
= (( M + m ) g sin 9 - ml 92 sin 9 cos 9 - -f cos 9) / D ;
= 0; At
|
.. 1 |
l g sin 9 |
|
|
x = — D |
ml cos 9 ml 92 sin 9 + f |
= ( ml 292 sin 9 + If - mgl sin 9 cos 9) / D.
Заметим, что правые части уравнений не содержат переменных х, х, т. е. положение и скорость каретки не влияют на ускорения маятника и каретки. Объект может занимать любое положение или совершать равномерное поступательное движение. Это не отразится на динамике системы «каретка-маятник».
Теперь легко записать уравнения объекта в форме Коши:
A9 = 9;
At
■
A 0
— = 0 = (( М + т)д sin О At
^^^^^е
- т/0 2 sin 0 cos 0 - f cos 0) / D;
Ax ■ x:
At
-^ = x = ( ml 26 2 sin 9 + If - mgl sin 6 cos 6 ) / D.
Если за начало отсчета угла маятника принять нижнее положение равновесия, то изменятся некоторые знаки во втором и четвертом уравнениях системы (7):
AG
— = 0 = (- (М + т)д sin 0
At
^^^^^е
(7а)
- т/ 02 sin 0 cos 0 + f cos 0) / D ;
— = x = (- ml 292 sin 9 + If -
At (7б)
- m g l sin 9 cos 9) / D .
Далее будем рассматривать малые отклоне
Ai) At
( М + т ) д0 - f
IM ’
Ax
— = x ; At
Ax f - тд0 At = М
Запишем линейную систему (8) в матричной форме с использованием вектора состояний v = ( 9 6 xi: ) '
— 0
At x
x
1 0 0
т + М
/М
д
0 0 0
0 0 10
х
-
тд
М
-
0 0 0
•
+
+
/М
М
x = [ 0 0 10 ] х
x
•
f ;
■ 0
x
+ 0 ■ f .
Получена линейная модель в так назы
ваемой форме пространства состояний
A v
= Av + Bf; At x = Cv + Df.
Первое из этих уравнений называется уравнением состояний, второе — уравнением выхода.
Матричная форма пространства состояний является стандартом для анализа линейных стационарных систем (типа LTI — Linear Time-Invariant). Для моделей класса LTI разработано большое количество методов, алгоритмов и программ анализа и синтеза систем управления. Такая форма принята как одна из основных в программе MATLAB / Control System Toolbox фирмы The MathWorks, Inc.
В уравнении выхода (10) за выход объекта — измеряемую непосредственно переменную принято положение каретки, т. е. скаляр. Поэтому матрица выхода С оказывается строкой. Если за выход принимать вектор ( 0 х )', то матрица выхода будет иметь две строки
"1000" С = ,
0 0 10
а матрица обхода получится столбцовой
Когда интересуются нижним положением равновесия маятника, т. е. начало отсчета углов внизу, некоторые элементы матриц А и В изменят знаки.
Исследуем модель на устойчивость. Устойчивость «в малом» положения равновесия (0 0 0 0)' нелинейной модели (7) можно выявить на основе первого метода Ляпунова, т. е. по линеаризованной модели. Ляпунов показал, что об устойчивости «в малом» положения равновесия можно судить по линеаризованным уравнениям. Условием асимптотической устойчивости положения равновесия нелинейной системы является принадлежность корней характеристического полинома (собственных значений матрицы состояний) линеаризованной системы открытой левой полуплоскости.
Корни характеристического полинома
( М + m )
A ( s ) = det( s l - A) = s 2 I s2-- ^m 9 I (11)
равны:
сти положения равновесия нелинейной системы.
Корни характеристического полинома (11) равны:
М + m 9
s 1 = s 2 = °; s 3,4 = ± hj М Jj , (12а) т. е. имеется пара мнимых корней, отражающих колебательные свойства системы. Частота колебаний маятника, подвешенного на подвижной каретке, отличается от частоты маятника с неподвижной точкой подвеса в
( М + т ) / М раз. Таким образом, подвижная опора повышает частоту колебаний маятника. Очевидно, если масса каретки многократно превышает массу маятника, то поведение системы приближается к поведению маятника с неподвижной точкой подвеса.
Линеаризованные уравнения (9) позволяют исследовать устойчивость и качественный характер движений при малых отклонениях состояния системы от положения равновесия. Для исследования поведения объекта управления при произвольных отклонениях необходимо решать нелинейные уравнения (7). Для автоматизации численных решений при конкретных начальных условиях и внешних воздействиях будем использовать программу MATLAB/Simulink фирмы The MathWorks, Inc.
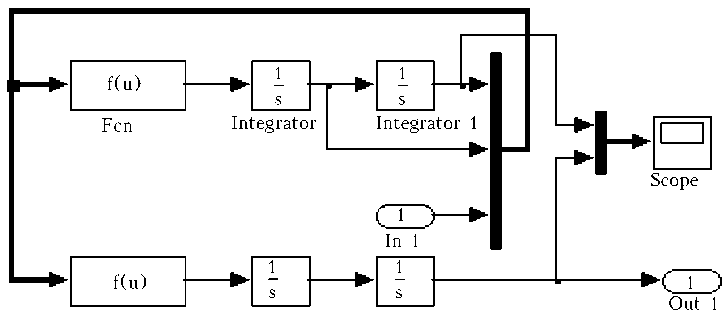
Построение компьютерной модели сводится к выбору соответствующих библиотечных блоков и их соединение ориентированными связями, как показано на рис. 2. Представленная структурная схема — модель объекта на языке Simulink. Основу программы образуют два двойных интегратора, входами которых являются вторые производные переменных.
Блоки Fen и Fcn1 реализуют выражения, находящиеся в правых частях второго и четвертого уравнений системы (7):
Fen : ((M+m)*9.8*sin(u[1])-m*l*u[2]*u[2]* *sin(u[1])*cos(u[1])-u[3]*cos(u[1]))/(l*M+ +m*l*sin(u[1])*sin(u[1]));
Fen/ : (m*l*l*u[2]*u[2]*sin(u[1])+l*u[3]-m* l*9.8*sin(u[1])*cos(u[1]))/(l*M+m*l*sin (u[1])*sin(u[1]))
На входы этих блоков подается вектор
(00 f ) • = (u[1] u[2] u[3]) - .
Выберем следующие значения параметров: I = 0,25 м; m = 0,2 кг; М = 0,4 кг и проведем компьютерный эксперимент при следующих начальных условиях:
Fen 1
Integrator 2 Integrator 3
P и с. 2. Модель на языке графического редактора Simulink
(бо бо ^0-^О )' = (1 0 0 0)' — маятник отклонен на 1 рад, угловая скорость маятника, положение и скорость каретки равны нулю. Рассматриваем свободные движения автономной системы - к каретке не оказывается воздействие, т.е. f = 0. На рис. 3 приведены результаты моделирования, из которых ясно, что верхнее положение маятника неустойчиво — при малейшем отклонении от него состояние системы не возвращается к нему, а начинаются колебания маятника относитель но нижнего положения. Маятник колеблется с амплитудой (к - 1) радиан, а каретка совершает периодические движения своеобразной формы.
Колебания маятника и каретки не затухают, так как построенная ранее математическая модель игнорирует потери энергии на преодоление сопротивления среды и трение. Полученные результаты могут быть использованы для изучения устойчивости ряда класса управляемых технических систем.
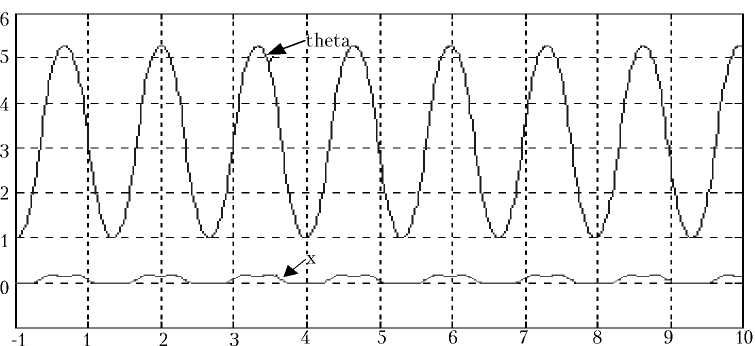
Р и с. 3. Поведение объекта управления при начальных условиях ( 10 0
Список литературы Анализ устойчивости перевернутого маятника в среде MATLAB /Control System Toolbox
- Андриевский Б. Р. Глобальная стабилизация неустойчивого маятника с маховичным управлением/Б. Р. Андриевский//УБС. 2009. 24. С. 258 280.
- Игонина Е. В. Синтез и устойчивость системы управления перевернутым маятником/Е. В. Игонина, А. А. Пирожок//Динамика неоднородных систем. 2010. № 53 (3). С. 47 52.
- Колесников А. А. Синергетическое управление системой «Перевернутый маятник на управляемой тележке»/А. А. Колесников//Тезисы докладов VII Международного семинара «Устойчивость и колебания нелинейных систем управления». М., 2002. С.45 49.
- Крутько П. Д. Декомпозирующие алгоритмы робастно устойчивых нелинейных многосвязных систем/П. Д. Крутько//Изв. РАН. ТиСУ. 2005. № 1. С. 67 75.
- Крутько П. Д. Робастно устойчивые структуры управляемых систем высокой динамической точности. Алгоритмы и динамика управления движением модельных объектов/П. Д. Крутько//Изв. РАН. ТиСУ. 2005. № 2. С. 112 116.
- Крутько П. Д. Стабилизация состояний равновесия двойного маятника, нагруженного следящей и консервативной силами/П. Д. Крутько, В. Е. Палош//Изв. РАН. ТиСУ. 2009. № 2. С. 3 17.
- Решмин С. А. Оптимальное по быстродействию управление перевернутым маятником в форме синтеза/С. А. Решмин, Ф. Л. Черноусько//Изв. РАН. ТиСУ. 2006. № 3. С. 123 128.
- Федосов Б. Т. Управление неустойчивыми объектами. Обратный маятник [Электронный ресурс]/Б. Т. Федосов. Режим доступа: http://www.keldysh.ru/papers/2007/source/> prep2007_20.pdfwww.keldysh.ru/papers/2007/source/prep2007_20.pdf http://www.keldysh.ru/papers/2007/source/prep2007_20.pdf>.
- Формальский А. М. О стабилизации перевернутого маятника с неподвижной или подвижной точкой подвеса/А. М. Формальский//ДАН. 2006. Т. 406, № 2. С. 175 179.
- Формальский А. М. Перевернутый маятник на неподвижном и подвижном основании/А. М. Формальский//ПММ. Т. 70, № 1. 2006. С. 62 71.
