Анализ влияния параметров на движение роботизированных транспортных платформ

Автор: Юрасов А.С., Виноградов А.В.
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Перспективные проекты
Статья в выпуске: 2 (43), 2024 года.
Бесплатный доступ
Цель исследования - анализ механических и динамических характеристик роботизированной транспортной платформы, включая расчет допустимых значений скорости при различных коэффициентах трения и углах наклона поверхности от 5° до 20°. Использованы методы инженерного эксперимента (проведение тестов, измерение параметров движения, оценка сил трения) и математического моделирования (разработка модели, симуляции для предсказания поведения, анализ зависимостей). Исследованы механические характеристики (масса робота и груза, конструкция платформы), динамические характеристики (скорость передвижения, ускорение и замедление), кинематические параметры (угол наклона поверхности и коэффициент трения). Результаты показывают зависимость движущей силы от угла наклона и других параметров платформы, оптимальные условия эксплуатации и допустимую массу груза. Оптимальная масса для достижения допустимой скорости составляет 150-210 кг. Предложенная модель позволяет определить оптимальные условия эксплуатации платформы, что способствует повышению точности управления и надежности эксплуатации в динамичных и изменяющихся средах.
Роботизированная платформа, движущая сила, сила трения, угол наклона, равноускоренное движение, грузоподъемность
Короткий адрес: https://sciup.org/147247511
IDR: 147247511 | УДК: 531.8
Analysis of the influence of parameters on the movement of robotic transport platforms
This paper presents a comprehensive analysis of the mechanical and dynamic characteristics of a robotic transport platform, including the calculation of permissible speed values under various coefficients of friction and surface inclinations. The dependence of the driving force on the angle of inclination and other platform parameters is demonstrated, allowing for the determination of optimal operating conditions. The main focus is on calculating the platform's speed when the load mass changes and examining the dependence of speed on mass to identify permissible load capacities. The results illustrate that the optimal mass for achieving permissible speed ranges between 150-210 kg.
Текст научной статьи Анализ влияния параметров на движение роботизированных транспортных платформ
Введение. В последние десятилетия значительный прогресс в области робототехники и автоматизации привел к широкому внедрению роботизированных транспортных платформ в различные сферы промышленности и логистики [1]. Эти платформы предназначены для выполнения различных задач, включая транспортировку грузов на производственных предприятиях, складских комплексах и логистических центрах [5]. Одним из ключевых аспектов эффективности роботизированных платформ является их способность к безопасному и быстрому перемещению в динамичной и изменяющейся среде, что требует точного учета различных параметров, таких как коэффициент трения, масса платформы и ее ориентация в пространстве [6]. Актуальность исследования обусловлена необходимостью повышения точности управления и надежности эксплуатации таких платформ [2, 7]. Основная цель работы - разработка математической модели, позволяющей определить движущую силу в зависимости от условий движения и характеристик поверхности. Результаты данного исследования могут быть полезны для разработчиков роботизированных систем, инженеров и специалистов по логистике, стремящихся улучшить производительность и надежность автоматизированных транспортных средств. Понимание взаимосвязи между параметрами движения и их влияние на поведение платформы позволит создавать более адаптивные и устойчивые системы, способные эффективно работать в различных условиях и справляться с непредвиденными ситуациями.
Материалы и методы. В работе применялся литературный обзор, методы инженерного эксперимента, изобретательской деятельности.
Результаты и обсуждение.
Введем обозначения:
-
• F – движущая сила, Н;
-
• Ртр - сила трения, Н;
-
• N – сила реакции опоры, Н;
-
• m – масса платформы, кг;
-
• g – ускорение свободного падения, м/с;
-
• α – угол склона, град;
-
• μ – коэффициент трения;
-
• а - ускорение движения платформы, м/с2.
Составим систему уравнений согласно второму закону Ньютона [4]:
г F + Ftp + N + Ft = та
t N + Ft = 0
Введем систему прямоугольных координат, в которой ось Ох параллельна силе подъема, а ось Оу–параллельна направлению силы реакции опоры. Переходя к скалярной форме посредством нахождения проекций на оси этой системы, и добавляя в систему соотношение силы реакции опоры и силы трения, запишем:
! F — Ftp — mg • sina = та N — mg • cosa = 0
Ftp = pN
Перенесем слагаемые mg∙sinα и mg∙cosα в правые части первых двух уравнений и представим силу реакции опоры в третьем уравнении произведением mg^ cosa. Заменим Frp в первом уравнении системы на произведение µmg∙cosα из ее третьего уравнения:
!F
- pmg • cosa = mg • sina + та N = mg • cosa ,
FTp = pmg • cosa
При помощи формулы 3 мы можем посчитать движущую силу роботизированной платформы, для этого необходимо знать ее значение ускорения. Так как роботизированная тележка перемещается по той же траектории, что и впереди идущий человек, то ее скорость напрямую зависит от средней скорости перемещения человека.
Рассмотрим случай, когда скорость роботизированной платформы и средняя скорость перемещения человека приблизительно равны и постоянны, то есть они движутся равномерно и параллельно относительно друг друга, тогда:
vp«v4,p = 1,39 м,(4)
vk = const, а = 0 ^2,(5)
F = FTp + mg • sina,(6)
Произведем расчет по 3 формуле, воспользовавшись следующими исходными данными: m = 150 кг; g = 10 ^2; g = 0,25 [3]. Подсчитаем значения движущейся силы при значениях угла наклона от 0° до 20°. Составим таблицу (таблица 1) и построим график (рисунок 1).
Таблица 1 - Зависимость силы подъема от угла наклона при vp ~ гч . с р
|
α, град |
0 |
5 |
10 |
15 |
20 |
|
F , Н |
300 |
429,6 |
555,9 |
678,1 |
794,9 |
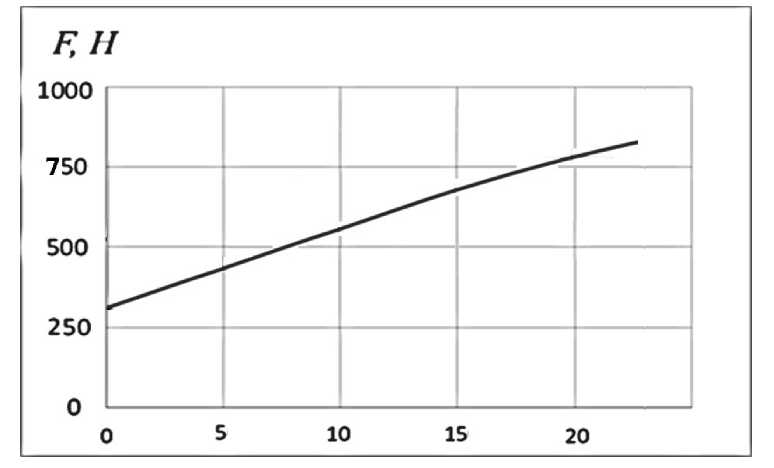
Рисунок 1 - Зависимость подъемный силы от угла наклона при vp ~ гср . ч
По данному графику видно, что чем больше угол наклона, тем больше движущая сила, следовательно, при возрастании угла наклона требуется прикладывать большую движущую силу, чтобы преодолеть силу тяжести и силу трения, действующие на роботизированную платформу.
Найдем среднюю скорость человека по следующей формуле:
V cp t ,
Узнаем допустимое значение средней скорости роботизированной платформы относительно средней скорости перемещения человека на отрезке ab равном 100 м.
км 1000•5 м
^сря = 5 — = 3600 = 1,39 с,
Выразим из приведенной выше формулы время, затрачиваемое человеком, чтобы пройти путь длиной 100 м:
$ _ 100 _ t vcp 1,39 = 72 c,
Рассмотрим случай, когда средняя скорость перемещения человека и скорость роботизированной платформы неравны друг другу и средняя скорость роботизированной платформы изменяется в процессе передвижения, то есть она приобретает ускорение. Зададимся, что ускорение роботизированной платформы величина постоянная и вид его движения равноускоренный:
^р ^ ^ср.ч^ср.ч I,39 ~ (8)
Зададимся условиями, что время на преодоление расстояния от а до b составит 72 с и S1 – расстояние между человеком и роботизированной платформой составляет 5 м, тогда найдем оставшееся расстояние S2, которое необходимо преодолеть роботизированной платформе (рисунок 2).
Рисунок 2 – Перемещение роботизированной платформы и человека на плоскости
S2 = S-S1 = 95 м,
Тогда при заданном времени и пути, найдем среднюю скорость передвижения роботизированной платформы:
vcp = 95 = 1,3 м, ср 72 с
Следовательно, найдём ускорение. Так как движение равноускоренное, то:
= ^к- ^ t , где тк - конечная скорость роботизированной платформы, равная 1,3м,
Тогда:
Vk
а = , t откуда, а = 1,3 —, при t = 1с - время разгона двигателя.
Тогда найдем значение движущей силы, воспользовавшись формулой (3) (таблица 2): F = цтд • cosa + та + тд • sina, где т = 150кг; д = 10^; ц = 0,25 [3]; а = 1,3 СМ .
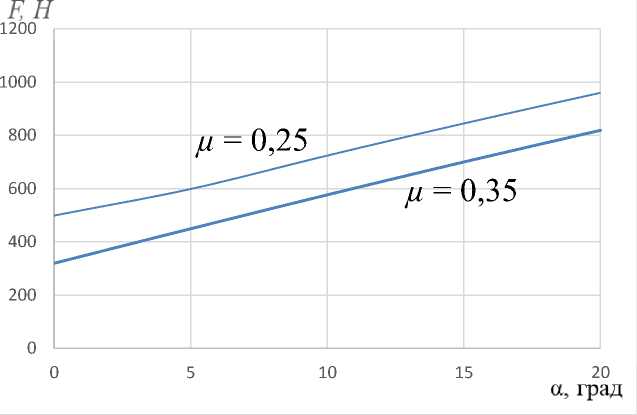
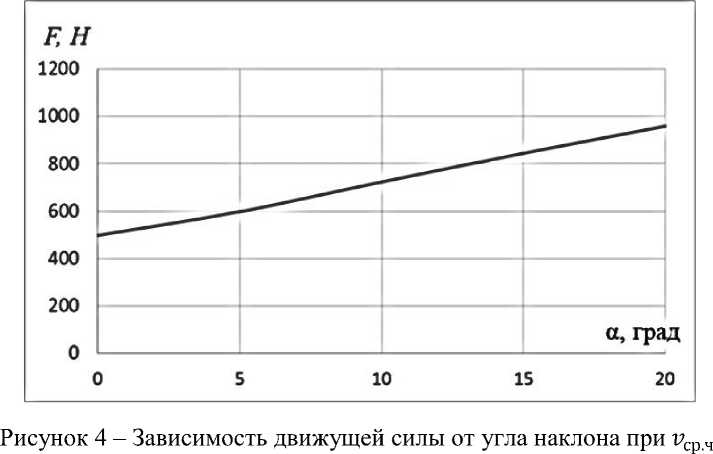
Рисунок 3 - Зависимость движущей силы от угла наклона при vp Ф vcp4
Произведем расчет при разных значениях коэффициента трения в равноускоренном движении роботизированной платформы. Воспользуемся ГОСТом 9128-2013, в котором принято следующее значение коэффициента трения, равное 0,25 - 0,35 [3].
Таблица 2 - Зависимость движущей силы от угла наклона при vp Ф аср . ч
|
α, град |
0 |
5 |
10 |
15 |
20 |
|
F , Н |
570 |
700 |
825 |
946 |
1060 |
По графику видно, что при меньшем значении коэффициента трения равное 0,25 движущая сила в два раза меньше, следовательно, для дальнейших расчетов примем F = 570 H; g = 0,25; a = 0° .
Воспользуемся ранее выведенной формулой, показывающей зависимость движущей силы от изменения угла склона:
I
F = ^.mg • cosa + ma + mg • sina а = 7 '
Подставим полученную формулу для нахождения ускорения роботизированной платформы в первое уравнение, связывающее силу и угол наклона. Покажем зависимость средней скорости от основных механических характеристик роботизированной платформы:
F = ^mg • cosa + m^- + mg • sina, Перенесем все значения, не содержащие скорость, в правую часть:
F — ^mg • cosa + mg • sina = m^-,
Разделим обе части уравнения на у :
F(F-^.mg^cosa+mg^sina) ---------m ---------= V k ,
t • (—^g • cosa + g • sina + у) = VK,
Возьмем ранее полученные значения: F = 570 Н; a = 0°; m = 150 кг; g = 10 ^2; д = 0,25;
t = 1 с: произведем подсчет конечного значения скорости роботизированной платформы:
Vk = 1,29 7.
Следует подчеркнуть, что по ранее полученной формуле, показывающей зависимость скорости от основных механических характеристик роботизированной платформы при равноускоренном движении, скорость передвижения и его масса обратно пропорциональные величины, следовательно, при увеличении массы платформы скорость будет падать. Произведем анализ данной зависимости с целью получения допустимых значений грузоподъемности роботизированной платформы v к , м/с (таблица 3).
Таблица 3 - Зависимость скорости от массы
|
m , кг |
80 |
120 |
150 |
180 |
210 |
|
м V k ,- с |
4,6 |
2,25 |
1,3 |
0,7 |
0,2 |
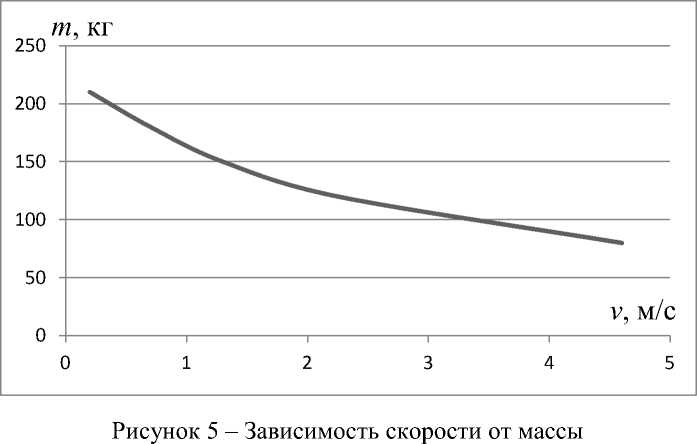
Исходя из расчетов и графика (рисунок 5), видно, что оптимальное значение скорости, близкое к допустимому значению 1,3 м , получается оптимальная масса роботизированной платформы является 150-210 кг, в случаях выше 210 кг на нее оказывается сильное сопротивление, из-за чего она не может разогнаться.
Заключение. Результаты исследования подтверждают, что движущая сила роботизированной платформы увеличивается с увеличением угла наклона поверхности и коэффициента трения. Также была установлена зависимость скорости от массы платформы: при увеличении массы скорость снижается. Эти данные необходимо учитывать при проектировании и эксплуатации платформ.
Список литературы Анализ влияния параметров на движение роботизированных транспортных платформ
- Белоногов А.В. Анализ и выбор систем навигации робота для позиционирования в условиях замкнутого пространства // Материалы IV Международной научной конференции "Технические науки: проблемы и перспективы". 2016. С. 40-42. EDN: WFFINV
- IEEE Transactions on Automation Science and Engineering. 2022.
- ГОСТ 9128-2013. Измерение коэффициента сцепления дорожного покрытия.
- Журавлёв В. Ф. "Масса [материальной точки] полагается постоянной, независящей ни от положения точки в пространстве, ни от времени" Основы теоретической механики. - М.: Физматлит, 2001. - С. 9. - 319 с.
- Xuewu Wang, Xin Zhou, Zelong Xia, Xingsheng Gu. A survey of welding robot intelligent path optimization. Journal of Manufacturing Processes. Volume 63. 2021. Pages 14-23.
- Y. Wen and P. Pagilla, "Path-Constrained and Collision-Free Optimal Trajectory Planning for Robot Manipulators", in IEEE Transactions on Automation Science and Engineering, vol. 20, no. 2, pp. 763-774, April 2023. EDN: FASBOA
- Локтионова О.Г., Савельева Е.В., Политов E.Н. Алгоритм управления движением мобильной роботизированной платформы с изменяемым уровнем автономности// International Journal of Open Information Technologies. 2023. EDN: FDLFNY
