Анализ влияния помех на эффективность обнаружения объекта в беспроводных сенсорных сетях с датчиками звука и вибрации

Автор: Парфенов В.И., Буй Ч.Т.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 4 т.28, 2025 года.
Бесплатный доступ
Обоснование. Большое влияние на эффективность функционирования беспроводных сенсорных сетей оказывает поглощение излучения от объекта наблюдения в окружающей среде. Учитывая также необходимость передачи информации от сенсоров в центральный узел, выносящего окончательное (комплексное) решение, следует констатировать, что задача обнаружения объекта излучения (цели) в таких системах существенно зависит от рельефа местности. Действительно, часто непосредственная передача информации от сенсоров в центральный узел бывает невозможна, в связи с чем информацию приходится передавать последовательно от сенсора к сенсору. Цель. Разработать алгоритмы обнаружения цели, используемые как в самих сенсорах, так и в центральном узле, при последовательной передаче информации от сенсора к сенсору с учетом ослабления излучения от объекта при использовании датчиков звукового и вибрационного типа. Методы. Синтез алгоритмов приема осуществлялся классическими методами статистической обработки информации, а анализ эффективности проводился по полученным точным рекуррентным формулам. Результаты. Синтезированы два комплексных алгоритма обнаружения объекта в беспроводных сенсорных сетях, и определена их эффективность для двух типов датчиков и разных сред распространения излучения. Показано, что первый из них обладает лучшей эффективностью по сравнению со вторым, однако проигрывает второму алгоритму из-за необходимости использования сенсоров с повышенной энергоемкостью источников питания. Заключение. Результаты, полученные в ходе проведенных исследований, могут быть эффективно использованы при выборе типа датчиков в зависимости от особенностей среды распространения и помеховой обстановки.
Беспроводные сенсорные сети, сенсоры, вероятность ошибки, коэффициент поглощения, окружающая среда
Короткий адрес: https://sciup.org/140313459
IDR: 140313459 | УДК: 621.391 | DOI: 10.18469/1810-3189.2025.28.4.87-96
Analysis of the effect of interference on the effectiveness of the detection of an object in wireless sensory networks with sound sensors and vibration
Background. The absorption of radiation from an object in the environment has a great influence on the efficiency of wireless sensor networks. Taking into account also the need to transmit information from sensors to a central point delivering a final (complex) solution, it should be noted that the task of detecting a radiation object (target) in such systems depends significantly on the terrain. Indeed, often the direct transmission of information from sensors to the central node is not possible, and therefore the information has to be transmitted sequentially from sensor to sensor. Aim. Develop target detection algorithms used both in the sensors themselves and in the central node, with a consistent transmission of information from sensor to sensor taking into account the attenuation of radiation from the object when using sound and vibration type sensors. Methods. The synthesis of reception algorithms was carried out by classical methods of statistical processing of information, and the analysis of efficiency was carried out according to obtained exact recurrency formulas. Results. Two complex algorithms of object detection in wireless sensor networks were synthesized and their efficiency was determined for two types of sensors and different radiation propagation media. The former is shown to be more efficient than the latter, but loses out on the second algorithm due to the need to use sensors with higher power consumption. Conclusion. The results obtained during the studies can be effectively used in selecting the type of sensors depending on the characteristics of the propagation environment and the interference situation.
Текст научной статьи Анализ влияния помех на эффективность обнаружения объекта в беспроводных сенсорных сетях с датчиками звука и вибрации
Беспроводные сенсорные сети (БСС) считаются одним из самых перспективных направлений развития технологий в двадцать первом веке. В прошедшее десятилетие идея беспроводных сенсорных сетей получила большое признание и в научном мире, и в промышленности во всем мире [1; 2]. Беспроводные сенсорные сети представляют собой самоорганизующиеся сети, состоящие из множества беспроводных сенсорных узлов, распределенных в пространстве и предназначенных для мониторинга характеристик окружающей среды или управления объектами, расположенными в ней. Благодаря своей высокой гибкости, расширенному охвату наблюдения, надежности, мобильности и экономической эффективности, на сегодняшний день беспроводные сенсорные сети являются основным способом сбора данных для широкого спектра приложений, таких как военное дело, сельское хозяйство, окружающая среда, транспорт, здоровье и т. д. Кроме того, БСС могут выступать в качестве распределенных охранных систем [3].
Обнаружение проникновения на охраняемые объекты в таких системах выполняется несколькими сенсорами. Учитывая ограниченные энергетические возможности миниатюрных сенсоров, целесообразно выносить решения о наличии или отсутствии проникновения непосредственно в самих локальных сенсорах и затем передавать только их по радиоканалу в центральный узел (ЦУ). В этом случае передавать требуется лишь локальные решения, представляемые в виде простой бинарной информации типа «да» или «нет». В центральном узле данные комплексируются, т. е. выносится окончательное решение о наличии или отсутствии объекта проникновения. Улучшение эффективности обнаружения по сравнению с эффективностью отдельных сенсоров за счет комплексирования информации в ЦУ было показано во многих ранее опубликованных работах [4–6]. В частности, в [7] были рассмотрены алгоритмы комплексирования информации в беспроводных сетях при использовании акустических и вибрационных сенсоров. Однако в этой и подобных работах предполагалось, что имеется возможность передачи информации непосредствен-
Е^Н © Парфенов В.И., Буй Ч.Т., 2025
Таблица 1. Коэффициент поглощения звука для некоторых сред распространения.
Table 1. Sound absorption coefficient for some environments.
|
Тип среды |
Частота |
ц/ f 2 , см -1<2 |
|
Воздух |
132–400 (кГц) |
2,94·10 -13 –3,99·10 -13 |
|
Кислород |
598,9 (кГц) |
1,68·10 -13 (давление 0,99 атм.) |
|
Углекислый газ |
304,4 (кГц) |
27,1·10 -13 (давление 0,98 атм.) |
|
Вода |
7–250 (МГц) |
25^10 ' 17 ( t° = 20°C) |
но от каждого сенсора в ЦУ. Подобную процедуру передачи информации, к сожалению, не всегда возможно реализовать в реальных условиях, учитывая неоднородный рельеф местности. Таким образом, основной целью настоящей работы является разработка алгоритмов обнаружения объектов и анализ их эффективности в БСС с различными видами сенсоров с учетом влияния среды распространения при отсутствии прямых каналов «сенсор – ЦУ».
1. Влияние окружающей среды на функционирование локального сенсора
Как известно, под сенсором понимается устройство непосредственного измерения физического, химического параметра (температуры, давления, частоты, силы света ...), преобразующее контролируемый параметр (величину) в удобный для дальнейшего использования сигнал, как правило, электрический. В распределенной системе охраны возможно применение датчиков (сенсоров), функционирование которых основывается на разных физических явлениях (звуковом, вибрационном, тепловом излучениях и пр.). Причем для наблюдения за одним и тем же объектом можно применять несколько сенсоров разного назначения. Кроме того, каждый локальный узел БСС содержит не только измерительный датчик, но и встроенные микропроцессор и передатчик. Микропроцессор по встроенному в нем алгоритму выносит локальное решение об обнаружении объекта. Передатчик передает эту информацию в ЦУ. В ЦУ на основании принятых решений от каждого сенсора осуществляется их комплексирование и выносится окончательное решение. Очевидно, что на эффективность обнаружения будут влиять помехи как в каналах «объект - i-й сенсор», так и в каналах « i-й сенсор - ( i +1)-й сенсор».
Итак, учтем, что сенсор измеряет некоторое физическое явление и преобразует его в электриче-
ский сигнал. Известно, что энергия преобразованного электрического сигнала пропорциональна порции излученной энергии от цели. Аналогично [8] запишем следующее выражение для интенсивности принимаемого сигнала в открытом пространстве:
P
I =----2 ■ exp (-2p-r).
4п r 2
Здесь P о - излучаемая мощность от источника, ц - коэффициент поглощения, зависящий от частоты излучения и свойств среды.
Коэффициент поглощения может быть получен либо по расчетным теоретическим формулам, либо взят из справочных материалов. В частности, формула для коэффициента поглощения звука имеет следующий вид [9]:
ю2
М =---я 2pv 3
4 г
■ -п +
C V
CP _
+ ^ Р,
где ю - частота звукового излучения, р - плот
ность среды; v - скорость распространения волны в среде; п - коэффициент внутреннего трения; ^ - коэффициент вязкости; X - коэффициент теплопроводности среды; C v , С р - удельные тепловые емкости при постоянном объеме и давлении; ц p - коэффициент поглощения, связанный с релаксацией [9].
Для примера в таблице 1 приведены некоторые значения коэффициентов поглощения звука для некоторых сред распространения.
В случае распространения вибрации в среде коэффициент поглощения описывается следующим выражением [10]:
р = 4,34 ^ v
1 I-1 + P2 ^ V2 I
— ■ 1 +
4 I Pl ■ Vi J
где ю - угловая частота вибрации; п - коэффициент потерь; v - скорость распространения волны; р - плотность среды (предполагается, что вибрация проходит от слоя с индексом «1» к среде с ин-
Таблица 2. Значения коэффициентов n , V и плотности р для основных типов грунта.
Table 2. Values of the coefficients n , V and density р for the main types of soil.
-
2. Алгоритмы обнаружения цели в беспроводных сенсорных системах
Рассмотрим беспроводную сенсорную систему, включающую в себя K сенсоров. Каждый сенсор воспринимает исходящее от цели определенное физическое воздействие (в нашем случае – звук или вибрацию) и определенным образом обрабатывает его с целью вынесения решения о наличии или отсутствии этой цели (объекта). Далее это бинарное решение последовательно передается по радиоканалу от сенсора к сенсору и, наконец, окончательно в ЦУ (еще раз подчеркнем, что передача информации непосредственно в ЦУ считается невозможной вследствие сложного рельефа местности).
Рассмотрим отдельно i-й локальный сенсор (i = 1, ..., K). Считаем, что первый сенсор (с номером i = 1) расположен на самом удаленном расстоянии от ЦУ, а последний (K-й сенсор) ближе всех к ЦУ. Для решения задачи обнаружения объекта наблюдения сенсором введем в рассмотрение гипотезу H 1, которая означает, что проникновение на наблюдаемый объект происходит, и гипотезу Hо, при выполнении которой такого проникновения на объект нет. Следовательно, сенсор может вынести только одно из двух решений, а именно, решение Ui = 1, если этот сенсор обнаружил объект, и Ui = -1, если сенсор не обнаружил его. Будем характеризовать эффективность обнаружения объекта сенсором вероятностями ложной тревоги ai = P ^ui = 1 |но ] и пропуска цели в i = P ^и^ = -1| H 1 ]. В практических условиях применения БСС в локальном сенсоре часто используется критерий обнаружения Неймана–Пирсона [11]. В связи с этим в дальнейшем вероятности ai, а следовательно, и пороги обнаружения hi считаем известными (одинаковыми для всех сенсоров). В то же время вероятность пропуска цели в i, оче- видно, зависит от энергии приходящего от цели (объекта) сигнала. Кроме того, учтем, что передача информации от сенсора к сенсору осуществляется по радиоканалу. В дальнейшем будем характеризовать i-й канал (между сенсорами i-м и (i+1)-м) вероятностью ошибки Pi. В случае энергетического обнаружения в i-м локальном сенсоре эти вероятности можно найти в соответствии со следующими выражениями:
a i = 1 -Ф ( h ), в i =Ф ( h — Z ( r i )), (4)
x
–
интеграл веро-
1 ,-x X 7 7
где Ф ( x ) = ■ exp(----) dx
2 n 2
ятности, r i - - расстояние от i -й цели до сенсора;
2E^
Z(ri) = у —]y — отношение сигнал/шум; h - по рог обнаружения; E (ri) - энергия принятого сигнала в i-м сенсоре; N – двусторонний спектр мощности белого шума.
На основании (1) запишем выражение для отношения сигнал/шум для i -го локального сенсора в сокращенном виде как
Z 0,- J exp( - 2 p^ r )
Z ( г. ) = i^ i’ , (5)
ri где Z0i – отношение сигнал/шум (ОСШ) при нулевом расстоянии от цели до сенсора.
Предположим, что для передачи информации от сенсора к сенсору используются сигналы с фазой манипуляцией. Тогда вероятность ошибки в канале с учетом (5) запишется в виде [12; 13]
P i =Ф ( - Z ( ъ )). (6)
В дальнейшем в данной работе будут рассматриваться два алгоритма для обнаружения проникновения на охраняемый объект.
Вначале рассмотрим первый алгоритм, в соответствии с которым каждый сенсор решает две задачи. Первая задача заключается в том, что каждый сенсор непосредственно сам по принятому от объекта излучению выносит локальное решение о наличии или отсутствии этого объекта в соответ- ствии со встроенным в нем алгоритмом. Результатом является либо решение Ui = -1, либо решение Ui =1. В соответствии со второй задачей сенсор передает свое решение, а также соответствующие решения, принятые от соседних сенсоров, далее по радиоканалу. Таким образом, окончательно в ЦУ придет пакет вида (u К\ и К- 1,... u(К)). Здесь uK – принятое в ЦУ решение от первого сенсора, ... и IК) - принятое в ЦУ решение от K-го сенсора. Следовательно, решение, вынесенное первым сенсором и заключенное в первом пакете, должно будет пройти через K каналов связи (последовательно от сенсора к сенсору), причем на каждом i-м шаге возможно ее искажение с вероятностью Pi. В то же время решение, вынесенное в последнем K-м сенсоре, пройдет всего один канал связи с вероятностью искажения в нем PK. Обозначим принятый в ЦУ пакет как (и К\ и К- 1,... и (К)) = (UK, UK-1,..., U1).
Аналогично [14] можно показать, что алгоритм обнаружения цели (объекта), используемый для вынесения окончательного (комплексного) решения в ЦУ, может быть представлен в следующем виде:
H 1
К к >
M=E Ci ■ Ui =E Xi < h,
H 0
где C i =
C1 = 1п(ф(1)/ф(0)), U = 1, C 2 i = 1n((1 -фi 0))/(1 -фi1))), Ui =
- 1,
k
1 + [П (1 — 2 Pj)] ■ (1 — 2 ■₽ i)
C 1 i = In
C i 4
U i = 1,
C 2 i = In
k
1 + П (1 - 2Pj)] ■ (2ai -1)
k
1 - П (1 - 2Pj)] ■ (2ai -1)
k
1 - [П (1 - 2 Pj)] ■ (1 - 2 ■₽ i)
,
,
Ui =-1.
В (7) использованы следующие обозначения: M – логарифм отношения правдоподобия, X i = C i ■ U i ,
k
фi0’ = 1 + П(1 - 2Pj) ■ (2ai -1),
_ j = i_
Г k"
ф i 1) = 1 + П^(1 - 2 P j ) ■ (1 - 2 P i ), пороговое значе-
. j = i_ ние h определяется исходя из выбранного критерия оптимальности.
Эффективность разработанного алгоритма (7) будем описывать вероятностью полной ошибки P ^ min = min( A ^ + B ^)/ 2. Минимальное значение этой вероятности достигается при определенном значении порога h , а A s и B ^ - вероятности ошибок первого и второго рода всей системы соответственно. По аналогии с [15] эти вероятности могут быть найдены на основе следующих рекуррентных соотношений:
A z= 1 -4*K’(h *), (8)
% =^K’( h *), где:
^k0’(h) = Фк0) '^ (h - C1 k) + (1 - Фк0’) '^ (h + C2k), ^Зh) = Фк1’ -^Vh-C1 k) + (1 -Фк1’)'^1’(h + C2k) .
Существенным недостатком первого алгоритма (алгоритм (7)) является то, что длина передаваемого пакета данных при передаче информации от сенсора к сенсору все время увеличивается. Действительно, если первый сенсор передает пакет данных, содержащий лишь сведения о собственном решении, то уже второй сенсор будет передавать пакет данных, имеющий размер, в два раза превышающий размер пакета от первого сенсора. А в ЦУ придет пакет данных, размер которого в ( K +1) раз превысит размер пакета от первого сенсора. Это будет приводить в конечном итоге к тому, что расход энергии сенсоров будет неравномерным: первый сенсор будет расходовать для передачи информации минимальную энергию, а K -й – максимальную. Следовательно, необходимо с увеличением номера сенсора увеличивать его энергоемкость, что не всегда возможно, да и не всегда целесообразно по экономическим причинам.
В связи с этим перейдем ко второму алгоритму, свободному от данного недостатка. Постановка задачи здесь аналогична, однако в данном алгоритме каждый сенсор выполняет уже три функции, а не две, как первый алгоритм. Первая функция заключается в следующем. Каждый i-й локальный сенсор, как и в первом алгоритме, обладает некоторым встроенным в него алгоритмом обнаружения. Этот алгоритм может быть реализован разными способами, но наиболее часто он представляет собой стандартный энергетический приемник. Используя этот приемник, каждый сенсор выносит локальное решение о наличии или отсут- ствии этого объекта. Однако далее в соответствии со второй функцией, в отличие от первого алгоритма, каждый i-й сенсор не только сам выносит решение, но и принимает информацию от соседнего (i-1)-го сенсора. Таким образом, в i-м сенсоре появляются два бинарных решения (собственное и от соседнего сенсора). Эти решения объединяются в одно общее, используя некоторый комплексный алгоритм обработки этих данных. Наконец, третья функция заключается в непосредственной передаче получаемого комплексного решения далее по радиоканалу к (i+1)-му сенсору. Если i = K, то информация от этого сенсора передается уже непосредственно в ЦУ, т. е. в ЦУ приходит пакет данных, содержащий обработанную информацию от последнего сенсора. Далее ЦУ в результате принятого от последнего сенсора сигнала должен вынести окончательное (комплексное) решение о наличии или отсутствии объекта.
Рассмотрим, как будут выглядеть алгоритмы вынесения решения в отдельных сенсорах и в ЦУ. С этой целью найдем отношения правдоподобий для каждого i -го сенсора Mi ( i = 2,… K ) и для ЦУ м цу • Аналогично [16] можно показать, что логарифм отношения правдоподобия, используемый в i -м сенсоре ( i = 2,… K ), можно записать в виде
а ^ и P z - вероятности ошибок первого и второго рода для ( i -1)-го сенсора для алгоритма ком-плексирования в этом сенсоре, которые могут быть легко найдены аналогично [16]. Таким образом, комплексный алгоритм обнаружения, используемый в i -м сенсоре, заключается в следующем. Находится отношение правдоподобия (9), в соответствии с критерием идеального наблюдателя [11] определяется порог обнаружения h i , и затем логарифм отношения правдоподобия сравнивается с найденным порогом. Если выполняется условие M i > h i , то выносится решение в пользу гипотезы H 1 , если M i < h i , то в пользу гипотезы H о •
Аналогичным образом выглядит алгоритм обнаружения, используемый в ЦУ. Несложно показать, что выражение для логарифма отношения правдоподобия можно представить в виде c 1, и(цу) = 1
c 2 , u
Mцу = ln( Лцу) =
где c 1 =
ln
K
( цу ) =
K
-1,
Mi
' C 11 i , u i = 1, u i i )i = 1, C 12 i , и =- 1, u ( ^ = 1, ' C 21 i , U i = 1, u i - 1 =- 1, C 22;, i (i) i
1 i ui =-1, ui-1 =-1>
где ui – собственное решение i -го сенсора о наличии или отсутствии объекта (цели); и i - 1 - возможно искаженная за счет помех информация, поступившая от ( i -1)-го сенсора в i -й сенсор, причем
C11i = ln
' ( 1 -в i )K 1 P - 1 + ( 1 • . ) ( 1 - P i - 1 ) ]'
а i [a Z i . ( 1 P i - 1
) + (1 -^ i - 1

c 2
= In
C 12 i
C21i = In
' (1 -pzK )(1 -PK) + 14PK } KK
aX (1 - P) +(1 -ax ) PK
\ z K K z к K у
' (1 -Pz к ) PK + PZ к (1 - PK) ] az PK + (1 -az )(1 - PK)
7 z K K z K K 7
Тогда в ЦУ на основе принятых данных u
( цу )
K
решение о наличии или отсутствии объекта (цели)
будет выноситься в соответствии с алгоритмом
_рфч л^^
( 1 -a i ) [« z i - 1 ( 1 - P i - 1 ) + ( 1 -« z i - 1 ) P i - 1
'(1 -ei >K, (1 - Pi-1 )+(1 -.)Pi-, ]' ai [azi_1 Pi-1 + (1 - aZi_1 ) (1 - Pi-1)]
C 22 i = In
P i [P Z i - 1 ( 1 - P i - 1 ) + ( 1 -P Z i - 1 ) P i - 1 ] '
J1 -ai)[azi .Pi-1 + (1 -az,
вида: если М цу > Ь цу , то выносится решение о том, что проникновение присутствует в зоне наблюдения (выполняется гипотеза H 1 ); если же М цу = 1п( Л цу) < Н цу , то решение выносится в пользу H 0 (проникновения отсутствует в зоне наблюдения). Порог обнаружения Ь цу , как и ранее, выбирался в соответствии с критерием идеального наблюдателя, т. е. из условия минимума полной вероятности ошибки P ^ min = min( aZ цу + pZ цу )/2 • Аналогично [16] можно показать, что вероятности ошибок обнаружения будут находиться
в соответствии со следующими рекуррентными
соотношениями:
ау = [ау (1 - P ) + (1 -ау )P ] х
zЦУ z K K z K K
Xl^ С 1 - Ьцу
)+[«^ PK
K
+
+(1 - ay z K
)(1 - PK)’°(c 2 - Ьцу),
в^цу =[(1 -^ K1,1 - PK'+ ₽z PK1 *
xg(^цу - c 1)+ [(1 - P^ )PK +
+вЕ (1 - PK ’^c(^ЦУ - c2)' K
Отметим, что эффективность обоих алгоритмов (формулы (8), (11)) описываются достаточно простыми рекуррентными соотношениями, особенно удобными при цифровой реализации.
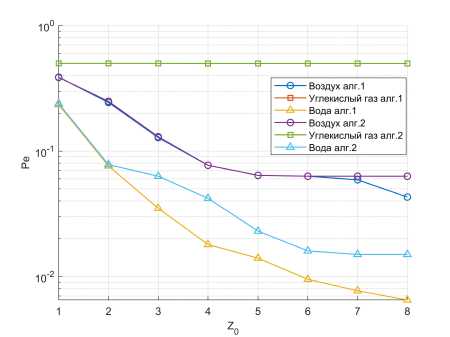
Рис. 1. Зависимость минимальной вероятности полной ошибки от ОСШ для различных сред распространения при
-
3. Результаты вычислений
-
a) Результаты вычислений эффективности обнаружения объекта с помощью БСС с датчиками звука.
Исследование эффективности разработанных комплексных алгоритмов обнаружения при использовании датчиков звука, т. е. определение минимальной вероятности полной ошибки всей системы, на основе двух предложенных алгоритмов (первого и второго) выполнялось для различных условий наблюдений, различающихся друг от друга характеристиками сред распространения, количеством сенсоров и ОСШ в каналах связи. Расчеты выполнялись при следующих предположениях: местоположение объекта априори известно; вероятность ложной тревоги для всех сенсоров одинакова и равна a = 10 - 1 ; вероятность пропуска сигнала для каждого сенсора, зависящая от расстояния до объекта, вычислялась по известным формулам [15].
На рис. 1 показана зависимость PΣ min от ОСШ Z0 для разных условий распространения при K = 10. Предполагалось, что в сети 10 сенсоров расположены на прямой линии длиной L = 3 (в дальнейшем все численные значения приводятся в некоторых безразмерных величинах). Координаты объекта наблюдения считались известными: (x0; y0) = (1,66; 0,3), координаты ЦУ также предполагались известными и равными (xx; yy) = (3; -1), т. е. объект находился примерно посередине, а ЦУ – ближе к краю (к последнему K-му сенсору) сети. Параметры 8 = 0,5, у = 2. Значения коэффициентов поглощения звука для некоторых сред (воздух, углекислый газ, вода) распространения рассчитывались по данным из таблицы 1.
использовании датчиков звука
Fig. 1. The dependence of the minimum probability of a complete error on the SNR for various environments when using sound sensors
Из приведенных результатов следует, что минимальная вероятность полной ошибки уменьшается с ростом отношения сигнал/шум, однако не всегда. В частности, в углекислом газе потери при распространении настолько велики, что обнаружение объектов в таких условиях невозможно. В воздухе оба исследуемых алгоритма обладают практически одинаковой эффективностью приема. В то время как в воде некоторое преимущество в эффективности обнаружения имеет первый алгоритм. Действительно, при распространении в углекислом газе минимальная вероятность полной ошибки не меняется с ростом ОСШ и составляет примерно 0,5; в воздухе при увеличении ОСШ с одного до восьми эта вероятность уменьшается примерно в 9 раз; в воде этот выигрыш в эффективности обнаружения увеличивается до 16 раз (при применении алгоритма 2) и до 37 раз (при применении алгоритма 1).
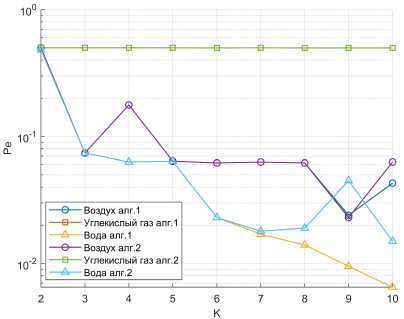
Рис. 2. Зависимость минимальной вероятности полной ошибки от количества сенсоров для различных сред распространения при использовании датчиков звука
Fig. 2. The dependence of the minimum probability of a complete error on the number of sensors for various environments when using sound sensors
На рис. 2 показана зависимость вероятности полной ошибки от количества сенсоров в сети при разных условиях распространения звука для двух синтезированных ранее алгоритмов (при ОСШ Z o = 8). Из анализа приведенных результатов можно сделать вывод, что в целом (за исключением опять же среды с углекислым газом) вероятность полной ошибки с ростом K уменьшается. При количестве используемых сенсоров, не превышающих 8–9, оба из рассматриваемых алгоритмов обладают примерно одинаковой эффективностью обнаружения. Уменьшение вероятности полной ошибки с ростом количества сенсоров более существенно для водной, чем для воздушной среды. В первом случае выигрыш в эффективности (при увеличении количества сенсоров в 8 раз) может достигать 70, а во втором – только 30. Наблюдаемый немонотонный характер поведения вероятности ошибки от K объясняется тем, что эта вероятность существенно зависит от взаимного расположения объекта излучения и сенсора.
-
b) Результаты вычислений эффективности обнаружения объекта с помощью БСС с датчиками вибрации.
Исследование эффективности разработанных комплексных алгоритмов обнаружения при использовании датчиков вибрации, т. е. определение минимальной вероятности полной ошибки всей системы на основе двух предложенных алгоритмов (первого и второго), выполнялось для различных условий наблюдений, различающихся друг от друга характеристиками сред распространения, количеством сенсоров и ОСШ в каналах связи. Расчеты выполнялись при следующих предположениях. Предполагалось, как и ранее, что в сети сенсоры расположены на прямой линии длиной L = 5 (в дальнейшем все численные значения приводятся в некоторых безразмерных величинах); местоположение объекта априори известно: (x0;y0) = (2,66; 1,2); координаты ЦУ также предполагались известными и равными ( xx ; yy ) = (5; - 1), т. е. объект находился примерно посередине, а ЦУ – ближе к краю (к последнему K -му сенсору) сети. Параметры 8 = 0,5, у = 2. Значения коэффициентов поглощения звука для некоторых сред (грунт, песок, глина) распространения рассчитывались по данным из таблицы 2. Вероятность ложной тревоги для всех сенсоров предполагалась одинаковой и равной б = 10 - 1 ; вероятность пропуска сигнала для каждого сенсора, зависящая от расстояния до объекта, вычислялась по известным формулам [16].
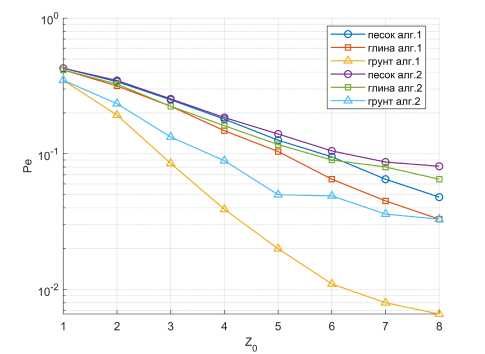
Рис 3. Зависимость минимальной вероятности полной ошибки от ОСШ для различных сред распространения при использовании датчиков вибрации
Fig. 3. The dependence of the minimum probability of a full error on the SNR for various environments when using vibration sensors
На рис. 3 показана зависимость минимальной вероятности полной ошибки от ОСШ Z 0 в сети для разных условий распространения (при K = 5). Как и следовало ожидать, вероятность ошибки уменьшается с ростом ОСШ. Анализ приведенных результатов свидетельствует о том, что наилучшая эффективность достигается при распространении вибрации в грунте – в этом случае вероятность ошибки уменьшается примерно в 6 раз при увеличении ОСШ от одного до 8, в то время как в песке этот выигрыш составляет всего 5 раз. При распространении в глине этот выигрыш чуть больше, но незначительно.
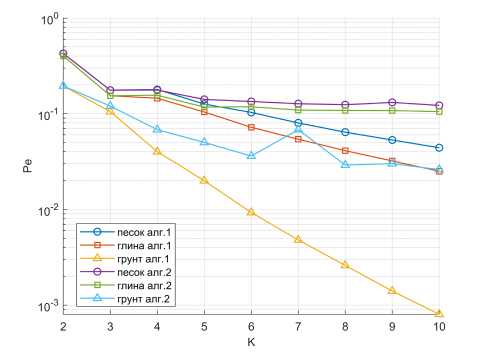
Рис. 4. Зависимость минимальной вероятности полной ошибки от количества сенсоров для различных сред распространения при использовании датчиков вибрации
Fig. 4. The dependence of the minimum probability of a complete error on the number of sensors for various environments when using vibration sensors
На рис. 4 показана зависимость вероятности полной ошибки от количества сенсоров в сети при разных условиях распространения вибра- ции для двух синтезированных ранее алгоритмов (при ОСШ Zо = 5). Из приведенных результатов следует, что эта вероятность в целом уменьшается с ростом К. Причем, как и ранее, наилучшей средой (с точки зрения достижения минимальной вероятности ошибки обнаружения объекта) распространения оказался грунт, далее – глина и, наконец, самым плохим – песок. Причем первый алгоритм (формула (7)) в рассматриваемых условиях оказался более эффективным, чем второй.
Заключение
В работе были выполнены статистический синтез и анализ двух алгоритмов комплексирования информации в беспроводных сенсорных сетях с учетом влияния окружающих сред распространения. Рассматривались два типа датчиков – звуковой и вибрации, а также среды распространения с различными характеристиками. Сравнительный анализ приведенных результатов с результатами из [7], выполненных в одинаковых условиях, показал, что синтезированные алгоритмы несколько проигрывают в эффективности обнаружения результатам из [7]. Однако не следует забывать, что разработанные в данной работе алгоритмы целесообразно применять при сложном рельефе местности, когда отсутствует прямая видимость с ЦУ, когда алгоритмы из [7] становятся в принципе неработоспособными. Отметим также, что приведенные результаты позволяют оценить эффективность принятия решения системой в разных средах функционирования локальных сенсоров и предварительно осуществлять выбор типа сенсора и типа алгоритма для повышения качества работы всей системы.
Информация о конфликте интересов: у авторов нет конфликта интересов, о котором следует заявить. Все соавторы ознакомились с содержанием рукописи и согласны с ним, и нет финансовой заинтересованности, о которой следует сообщить. Мы подтверждаем, что представленная работа является оригинальной и не находится на рассмотрении в каком-либо другом издании.
Информация о вкладе каждого автора: Парфенов В.И. – концепция и дизайн исследования, анализ полученных данных и написание текста; Буй Ч.Т. – сбор и обработка материалов, написание текста. Все авторы внесли значимый вклад в проведение исследования и подготовку статьи, прочли и одобрили финальную версию статьи до публикации.
