Анализ восстановления квадратурных составляющих по пилот-сигналам

Автор: Комарова К.В.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4 т.23, 2021 года.
Бесплатный доступ
Рассмотрена задача восстановления квадратурных составляющих по пилот-сигналам в многочастотных системах связи. Для нахождения дисперсии ошибки оценивания квадратурных составляющих используются методы фильтрация Калмана, авторегрессионные процессы 1 и 2 порядка.
Корреляционная функция, квадратурные составляющие, пилот-сигналы, многочастотные системы связи, относительная дисперсия ошибки
Короткий адрес: https://sciup.org/148323269
IDR: 148323269 | УДК: 004.94 | DOI: 10.37313/1990-5378-2021-23-4-111-115
Analysis of recovery of square components from pilot signals
The problem of restoring quadrature components from pilot signals in multi-frequency communication systems is considered. To find the variance of the error in estimating quadrature components, the Kalman filtering methods and autoregressive processes of the 1st and 2nd order are used.
Текст научной статьи Анализ восстановления квадратурных составляющих по пилот-сигналам
Для систем радиосвязи важной проблемой является повышение помехоустойчивости приёма цифровых дискретных сигналов. В системах приема дискретных сообщений пилот-сигналы используются для восстановления квадратурных составляющих коэффициента передачи канала связи [1]. Применение пилот-сигналов позволяет дать оценку частотно-временного поля характеристик принимаемых сигналов и снизить вероятность ошибочного приема символов. Поэтому их число должно выбираться с учетом компромисса между снижением скорости передачи информации и качеством оценивания характеристик замираний. Для оценивания (интерполяции) частотно-временного случайного поля (СП) применяются различные методы, тесно связанные с моделями представления СП квадратурных составляющих [2]. Наиболее эффективно представление СП в виде двумерного марковского поля, что позволяет применять для восстановления калмановские алгоритмы [3]. Вместе с тем, это приводит к дополнительным ошибкам за счет замены реальных корреляционных функций (КФ), СП экспоненциальными. Таким образом, встает актуальная задача сравнительного анализа эффективности алгоритмов восстановления СП квадратурных составляющих в системах мобильной связи на основе известных и предложенных методов представления СП с помощью авторегрессий с кратными корнями характеристических уравнений.
Рассмотрим возможности восстановления квадратурных составляющих с корреляционной функцией (КФ) в пространстве частот. Для нахождения дисперсии ошибки оценивания квадратурных составляющих воспользуемся филь-
трацией Калмана при аппроксимации реальной дробно-рациональной КФ авторегрессионными (АР) процессами первого и второго порядка.
Оптимальная оценка вектора квадратурных составляющих записывается в виде [4]:
,
где P – ковариационная матрица ошибок оценивания. Используя формулы, запишем
, (2)
где Vx = M^xx г} – ковариационная матрица вектора значений квадратурных составляющих. Структура этой матрицы имеет следу-
ющий вид:
/ ^2
14 =
5*2 1
Вг 2
-2
ВВ
1 3
2 3
ВВ
1 м
2 М
, (3)
Rm 1
Rm 2
Rm г
где – ковариация между значениями квадратурных составляющих на частотах . Эту матрицу удобно переписать в виде:
где
;
–
коэффициент корреля-
ции квадратурных составляющих, которые находятся по заданной КФ:
R.. = RQ< = i -j) = R(k) =
= R(M =
,
где – разность соседних
частот. уровне [5-6]:
Заданный интервал корреляции ^0 на 1/ e позволяет выбрать коэффициент £F
R(k0)=1 e

Ve—1 или a — , где e – основание натурального
^0
логарифма.
Обычно применение фильтра Калмана основано на замене КФ экспонентой
^1(Ю = о^р^1 , (7)
где Py находится из условия равенства W- . При этом pY = e ^o. e
Для повышения эффективности восстановления квадратурных составляющих будем использовать АР процесс с корнем характеристического уравнения кратности m=2 . При этом КФ
RiU^qi+^W^ , (8) где параметр p по заданному значению /Cq .
На рис. 1 приведены три графика КФ R®, R^k), R2(k) при ko = 10. Хоро шо видно, что КФ ^2 ( ^ D лучше аппроксимирует реальную частотную КФ 7? (k ).
ДИСПЕРСИЯ ОШИБКИ ДЛЯ ДВУХ ПИЛОТ-СИГНАЛОВ составляющих на 10 частотных позициях с дву- мя пилот-сигналами, расположенными на первой и девятой позициях.
При этом в формуле:
-1000000000
относительные дисперсии ошибок оценивания будут диагональными элементами матрицы.
^ = VX(E+ q^CV^1 , (9)
гдеq=^– отношение сигнал/шум. Структу- ра матрицы имеет следующий вид:
/ »i Лг/^Х Лз/^Х - Р1м/о,\
L= ^21/^ "2 ^2з/"х - PimIOxX
,(0)
Vmi/Ox Рмг/oi Рмз/»х - Ом ’ где °1 ~ ^eXI^x^I ~ aE^iax,…,
^M — т2 – относительные дисперсии оши- бок оценивания квадратурных составляющих.
a^ = si^Truz^ =.
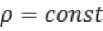
Представлены графики при, как для q=10, так и для q=100, (рис. 3, 4).
Из рисунков 3 и 4 видно, что АР моделей с кратными корнями характеристических уравнений и КФ R2(k) (АР процесс с корнем характеристического уравнения кратности m=2) немного проигрывает по дисперсии ошибки по отношению к фильтрации с КФ R(k). Предложенный подход R(k) более эффективен, чем остальные методы фильтрации.
Представленное на рис. 2 в качестве примера рассмотрим восстановление квадратурных
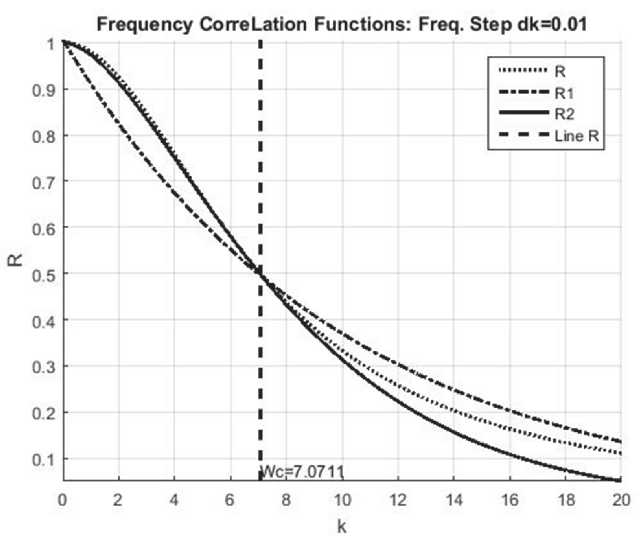
Рис. 1. Корреляционные функции по частоте dk = 0,01, где dk – дискретность шага.

1 23456789 10
Рис. 2. Расположение двух пилот-сигналов
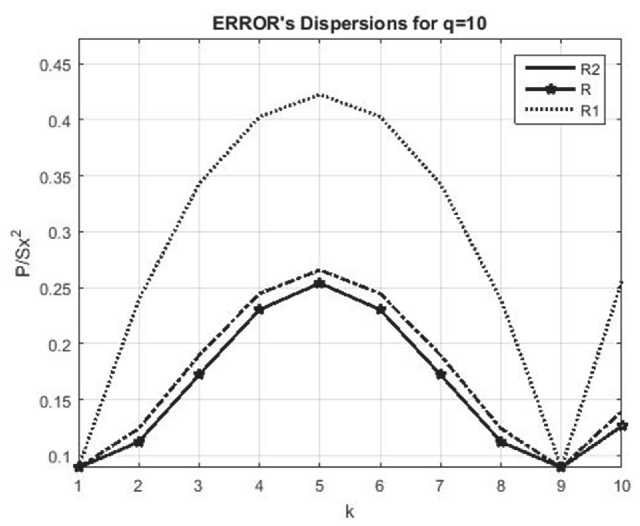
Рис. 3. Относительная дисперсия ошибки при

:, q = 10
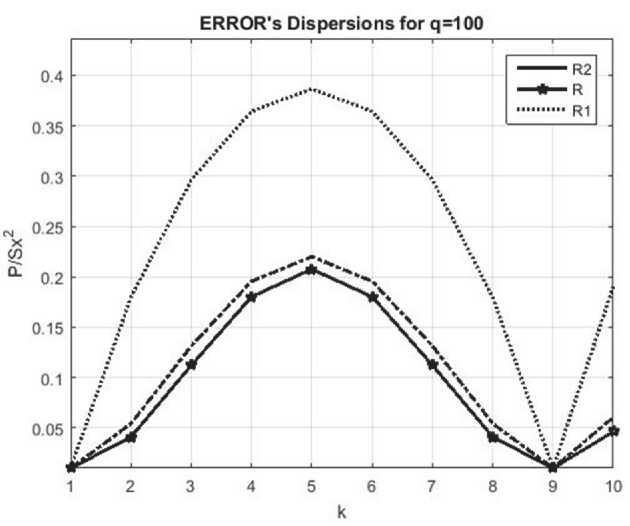
Рис. 4. Относительная дисперсия ошибки при р = \5 'ль t, q = 100
При анализе эффективности восстановления значений квадратурных составляющих по частоте произведено сравнение алгоритмов Калмана, авторегрессионных процессов с корнями характеристического уравнения. Установ лен существенный (в 2 - 3 раза) проигрыш по величине дисперсии ошибки восстановления при использовании классической калмановской фильтрации с экспоненциальной аппроксимацией R 1 (k). Вместе с тем, авторегрессионные мо- дели обеспечивают возможности применения восстановления квадратурных составляющих по пилот-сигналам в реальном масштабе времени.
ДИСПЕРСИЯ ОШИБКИДЛЯ ЧЕТЫРЁХ ПИЛОТ-СИГНАЛОВ
Представленное на рис. 5 рассмотрим восстановление квадратурных составляющих на 10 частотных позициях с четырьмя пилот-сигнала-ми, расположенными на первой-второй и восьмой-девятой позициях.
При этом в формуле:
С = 0000001000 0000000010
относительные дисперсии ошибок оценивания будут диагональными элементами матрицы.
^ = VX(E+ q^CV^1 , (6)
где q= — – отношение сигнал/шум. Структу- T2
ра матрицы имеет следующий вид:
a2
P^/^ P13fOx - Р1м/Ох\
»2 ^23/^ ™ РгМ^х I ,(7)
^мг/^х Рмз!^х — ам /
ZT2 — ZT2 /zr2 ZT2 — ZT2 /zt2
где ^1 ~ QexIQX»°T ~ ^ETi^X , …,
^м — – относительные дисперсии оши бок оценивания квадратурных составляющих.
a^ = si^Truz^ = .
Представлены графики при p = const, как для q =10, так и для q =100, (рисунки 6, 7).
Как следует из анализа кривых на рис. 6 и рис. 7, применение АР моделей с кратными корнями характеристических уравнений и КФ R 2(k)
практически не приводит к проигрышу по дисперсии ошибки по отношению к фильтрации с КФ R(k). Заметим, что использование классической калмановской фильтрации с экспоненциальной аппроксимацией R1(k) реальных КФ проигрывает предложенному подходу в 2-3 раза по дисперсии ошибки восстановления при не- значительном уменьшении вычислительных затрат. Вместе с тем, АР модели обеспечивают возможности применения калмановского восстановления квадратурных составляющих по пилот-сигналам в реальном масштабе времени.
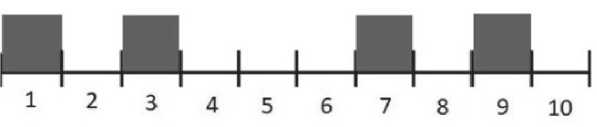
Рис. 5. Расположение четырёх пилот-сигналов
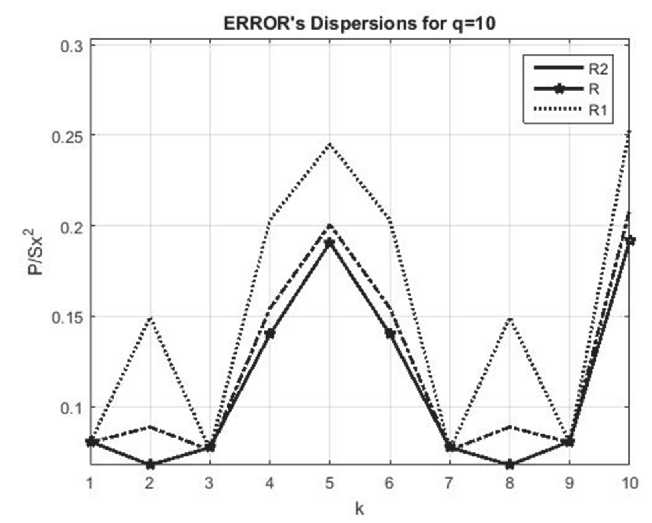
Рис. 6. Относительная дисперсия ошибки при
, q = 10
Рис. 7. Относительная дисперсия ошибки при р = const, q = 100
ЗАКЛЮЧЕНИЕ
В работе представлен анализ эффективности алгоритмов восстановления случайных полей квадратурных составляющих в системах мобильной связи на основе известных и предложенных методов представления случайных полей с помощью авторегрессий с кратными корнями характеристических уравнений. Предложено осуществлять восстановление полей канала связи в реальном масштабе времени на основе калмановской фильтрации с применением АР моделей с кратными корнями характеристических уравнений. Установлено, что использование классической калмановской фильтрации с экспоненциальной аппроксимацией R 1 (k) реальных КФ проигрывает предложенному подходу в 2-3 раза по дисперсии ошибки восстановления при незначительном уменьшении вычислительных затрат.
Список литературы Анализ восстановления квадратурных составляющих по пилот-сигналам
- Чердынцев В. А. Оптимальные алгоритмы приёма цифровых сигналов в каналах с помехами. [Электронный ресурс] - URL: https://cyberleninka.ru/article/n/optimalnye-algoritmy-priema-tsifrovyh-signalov-v-kanalah-s-pomehami/viewer
- Каюков И.В., Манелис В.Б. Квазикогерентный прием многолучевого сигнала с прерывистым пилот-сигналом в мобильных системах связи // Цифровая обработка сигналов. 2003. № 1. С. 11-16.
- Камаев Д.Ш. Оценивание квадратурных составляющих в системах мобильной связи с пилот-сигналами // 60-я Научная сессия, посвященная Дню радио, г. Москва РНТОРЭС им. А.С. Попова, 2005. С. 65-69.
- Белянчиков А. В. Корреляционные функции авторегрессионных случайных полей с кратными корнями характеристических уравнений // Современные проблемы проектирования, производства и эксплуатации радиотехнических систем. 2018. С. 158
- Джеймс У.К. Связь с подвижными объектами в диапазоне СВЧ [пер. с англ. - Под ред. М.С. Ярлыкова, М.В.Чернякова]. - М.: Связь, 1979. - 520 с.
- Васильев К.К. Оптимальная обработка сигналов в дискретном времени: учеб. пособие. - М.: Радиотехника, 2016. - 288 с.
