Автоматический сбор информации о параметрах транспортного потока в целях обеспечения безопасности дорожного движения

Автор: Маковецкая-Абрамова Ольга Валентиновна
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Диагностика и ремонт
Статья в выпуске: 1 (43), 2018 года.
Бесплатный доступ
Статья содержит результаты экспериментов по сбору информации о параметрах транспортного потока в автоматическом режиме с применением цифровой обработки сигналов.
Транспортный поток, распознавание образов, растровый датчик, преобразование фурье
Короткий адрес: https://sciup.org/148186401
IDR: 148186401 | УДК: 004.93
Текст научной статьи Автоматический сбор информации о параметрах транспортного потока в целях обеспечения безопасности дорожного движения
Проблема обеспечения безопасности дорожного движения в мире в последние годы становится все более острой. Постоянное увеличение автомобильного парка, наряду с другими причинами, привело к резкому росту количества дорожно-транспортных происшествий (ДТП), тяжесть последствий которых вполне сравнима с национальным бедствием для многих и стран, в том числе и для России. Причинами смертей в результате ДТП являются многие факторы: это и плохие дороги, и плохие водительские умения, и вождение автомобиля в состоянии алкогольного опьянения, невнимательность и плохая культура вождения и многие другие факторы. Каждые сутки на дорогах России погибают более 20 и получают ранения около 500 человек. Для решения проблемы безопасности дорожного движения (БДД) требуется проведение комплексных мероприятий:
– уточнение требований к здоровью водителей, совершенствование системы подготовки;
-
– повышение требований к конструктивной безопасности автомобилей и техническому состоянию их в условиях эксплуатации;
-
– разработку объективных методов оценки причин возникновения происшествий;
-
– организацию и оперативное управление движением – активное и пассивное регулирование;
-
– своевременная информация водителей о постоянных и меняющихся условиях движения;
-
– совершенствование медицинской и технической помощи при ДТП;
-
– учет особенностей восприятия водителем дорожных условий в проектировании дорог и организации движения;
-
– поддержание службой ремонта и содержания дорог транспортноэксплуатационных качеств дороги; и другие.
Информация о ситуации на дороге фиксируется видеокамерами, системы видеослежения помогают в поиске автомобилей по государственному номеру, находящийся в розыске, угоне, фиксируют данные о случившимся дорожно-транспортном происшествии. Существует множество алгоритмов обработки видеоинформации в мониторинге транспортных потоков [1]. Однако записи на камеры слежения имеют общий недостаток избыточности информации, фактически без применения сложных алгоритмов они дублирует глаз и память человека стоящего на обочине дороги.
Организация движения и оперативное управление движением, а так же своевременное информирование водителя об изменениях в транспортном потоке осуществляется по каналам телекоммуникационной связи автомобиля с диспетчерской службой в рамках работы интеллектуальных транспортных систем.
С 1 января 2017 года в России – все транспортные средства, выпускаемые в обращение на территории стран Таможенного союза оснащены автомобильными терминалами“ЭРА ГЛОНАСС”– системой экстренного реагирования при авариях. Предполагается, что внедрение системы приведёт к сокращению времени реагирования при авариях и других чрезвычайных ситуациях, что позволит снизить уровень смертности и травматизма на дорогах и повысить безопасность грузовых и пассажирских перевозок. Подобные комплексные системы мониторинга и регистрации транспортных средств работают во всем мире - это, например, проект SIMRAV в Бразилии, проект E911 и программы NG9-1-1 в США, диспетчерской службой быстрого реагирования под названием
ECall в Японии и Европе. В будущем количество автомобилей включенных в системы транспортной телематики будет увеличиваться, однако сегодня не весь парк автомобилей подключен к терминалам систем мониторинга и регистрации [2].
В данном исследовании показана эффективность применения наземных детекторов изучения транспортного потока. Перспективным для получения информации о параметрах транспортного потока – интенсивности движения, плотности потока, качественного состава потока является применение оптикоэлектронных растровых датчиков. Сигнал, регистрируемый оптико-электронным датчиком, является результатом свертки собственного сигнала АТС e(t) с импульсной характеристикой растра h(t) (диаграммой направленности). Процедура восстановления входного сигнала e(t) по наблюдаемой свертке и известному описанию самого объекта называется “обратным цифровым преобразованием”
Датчик прост в изготовлении и обслуживании, может работать в любых погодных условиях (ветер, снег, дождь), так же на его работоспособность не влияет пыль и дым что особенно важно в реальных условиях трассы [3].
На рисунке 1 представлена фотография растрового датчика, рисунок 2, иллюстрирует элементарную ячейку пластинчатого растра.

Рисунок 1 – Фотография растрового датчика
Оптико-электронный датчик фиксирует перекрываемый, движущемся автомобилем оптический фон, превращая его в электрический сигнал. Данные сигналы получили название “оптических образов” автомобилей. Библиотека оптических образов автомобилей разного класса (легковых, грузовых, автобусов и пр.), собранная в ходе данного исследования показала необходимость дополнительной цифровой обработки сигналов – для выявления отличительных характеристик. В качестве математическо-
О.В. Маковецкая-Абрамова го аппарата обработки сигналов было применено двойное преобразование Фурье. В результате, для получения характерных признаков сигналов были получены кепстры сигналов, для разделения сигналов в случае их наложения, в поле зрения растра, был использован алгоритм оператора деконволюции.
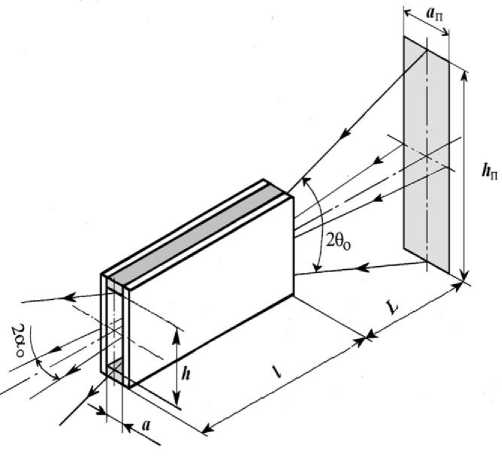
Рисунок 2 - Элементарная ячейка пластинчатого растра
Кепстры сигналов более информативны – сравнение с библиотекой кепстров в автоматическом режиме позволяет отнести проезжающий автомобиль к тому или иному классу. Деконволюция сигналов требуется в случае наложения оптических образов от нескольких автомобилей, что случается достаточно часто в условиях многорядного двустороннего движения.
Данные исследования проводились на оборудовании передвижной лаборатории мониторинга транспортного потока, созданной на кафедре Общей и прикладной физики
Владимирского государственного университета [4]. Схема оборудования лаборатории представлена на рисунке 2.
Информация о параметрах транспортного потока собранная при помощи детектора на основе пластинчатого растра использовалась для расчета нагрузки на дорожное полотно – автодорожным хозяйством г. Владимир, для обоснования мест расположения регулируемых перекрестков и режима работы светофоров – УГИБДД Владимирской области, для решения задачи снижения аварийности на дорогах, уменьшения количества дорожнотранспортных происшествий.
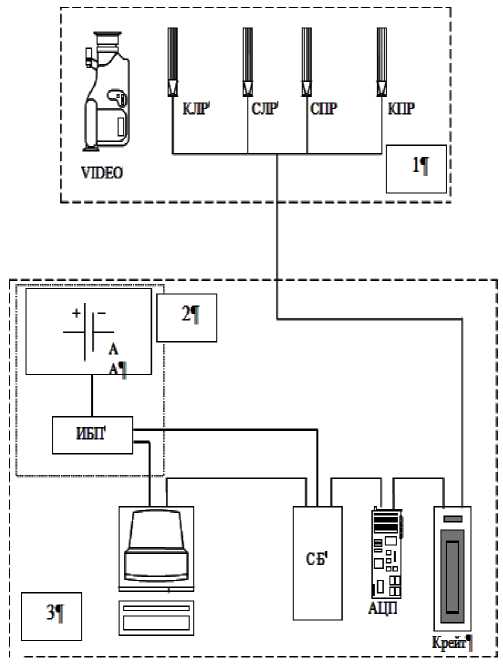
Рисунок 2 - Передвижная лаборатория: 1 - выносной блок ; 2 – источник питания; 3 – регистрирующий блок
Список литературы Автоматический сбор информации о параметрах транспортного потока в целях обеспечения безопасности дорожного движения
- Кузмин С.А. Алгоритмы обработки видеоинформации в системе мониторинга транспортных потоков -Электротехнические и информационные комплексы и системы. No 3, т. 1, 2015.
- Ю. Недре После нашей Эры -https://auto.mail.ru/25.11.2013. 10:00 статьи.
- Маковецкая-Абрамова О.В. Автоматическое распознавание оптических образов транспортных средств: моногр./СПб., изд-во СПбГЭУ, 2017-115с.
- Плешивцев В.С. Некоторые проблемы организации управления транспортными потоками: моногр./Владимир, изд-во ВлГУ, 2001 -79с.
