Автоматизация двухосевого поворотного стола КИН-52

Автор: Седышев Вячеслав Викторович, Белочкин Павел Евгеньевич, Шаршин Дмитрий Николаевич, Карпусевич Константин Родионович
Рубрика: Приборостроение, метрология и информационно-измерительные приборы и системы
Статья в выпуске: 1 т.16, 2016 года.
Бесплатный доступ
Статья посвящена автоматизации двухосевого поворотного стола созданного на базе стационарного КИН-52. Представлены конструкторские решения механизма наклона по наружной оси и модуля вращения по внутренней оси испытательного стенда. Даны конструкторские оценки, как всего испытательного стенда, так и отдельных его элементов. Для автоматизированного электромеханического управления движением по осям стенда разработана и реализована функциональная схема поворотного стола, которая воплощена в специальном блоке управления. На лицевой стороне блока управления имеется сенсорная операторная панели, которая позволяет осуществлять дистанционное управление режимами работы стенда. Сбор данных с испытуемого прибора и параметров работы стенда осуществляется по отдельному каналу. В статье приведены результаты калибровки энкодера, позволяющие судить о реальной точности датчика углового перемещения. Работа модуля вращения отображена только на режимах разгона и торможения. Представленная математическая модель отражает основные переменные и параметры стенда.
Автоматизация, конструкция, поворотный стол
Короткий адрес: https://sciup.org/147155099
IDR: 147155099 | УДК: 681.5 | DOI: 10.14529/ctcr160107
Automation of two-axis rotary table KIN-52
The article is devoted to the two-axis turntable automation created on the basis of a stationary KIN-52. Design solutions tilt axis and on the outside of the module on the inner rotation axis of the test stand are presented. Design evaluation as all the test rig and its individual elements is given. A functional scheme of the turntable is developed and implemented for automated electromechanical motion control axes stand, which is embodied in a special control unit. On the front side of the control unit there is a touch operator panel that allows to carry out remote control of operating modes of the stand. Collecting of the data from the device under test and the parameters of the stand is carried out on a separate channel. The results of the calibration of the encoder allowing to judge the real accuracy rotary encoder are given. Job rotation module is displayed only on the mode of acceleration and deceleration. This mathematical model reflects the basic variables and parameters of the stand.
Текст научной статьи Автоматизация двухосевого поворотного стола КИН-52
Как показывает практика, современное прецизионное приборостроение нуждается в проведении испытаний приборов и систем в условиях максимальной реалистичности, т.е. приближенных к реальным условиям эксплуатации.
Испытания приборов ориентации и навигации, применяемых в транспортной промышленности и аэрокосмической отрасли, связаны с моделированием в лабораторных условиях различных режимов движения объектов, на которых в дальнейшем планируется эксплуатация приборов. Подобного рода испытания являются важным этапом подготовки к эксплуатации и ставят перед собой цель – проверку работоспособности, функциональной надежности изделия в реальных условиях применения.
Как правило, динамика транспортного средства, особенно движения летательных аппаратов, имеет сложный характер, что вызвано сложными траекториями движения и наличием переменных нагрузок. Это вызывает существенные трудности при разработке, проектировании, изготовлении испытательных стендов, имитирующих реальные условия полета.
В настоящее время наука и производство во всем мире накопило большой опыт решения подобных задач. Лидеры данной области – компании Ideal Aerosmith (США), Acutronic (Швейцария) – имеют в своем портфеле полный модельный ряд испытательного оборудования, начиная с малогабаритных поворотных столов и заканчивая большими многоосевыми стендами для моделирования и имитации полета [4].
Современные испытательные стенды – это сложные мехатронные системы, в которых гармонично сочетаются законы механики, электроники и теории автоматического управления [1, 2]. Для создания и производства отечественных испытательных стендов высокого качества нужно разработать методы, изготовить инструменты и подготовить специалистов передового уровня науки и техники, способных создавать высоконадежную испытательную аппаратуру.
В настоящее время кафедрой приборостроения ЮУрГУ решается задача разработки, проектирования, изготовления и испытания макета поворотного автоматизированного стенда для оценки точностных параметров гироскопических приборов, приборов навигации и бесплатфор-менных инерциальных блоков (БИБ) в условиях углового движения.
Данная статья отражает основные результаты выполненной по данной тематике научноисследовательской работы.
Приборостроение, метрология
1. Общий вид испытательного стенда
Разработка двухосного автоматизированного испытательного стенда базировалась на использовании в установке механической части поворотного стола КИН-52 с ручным управлением (рис. 1).
В разработанном автоматизированном стенде на наклонном столе КИН-52 закрепляется установочная рабочая площадка, на которую закрепляется собранный модуль вращения (рис. 2).
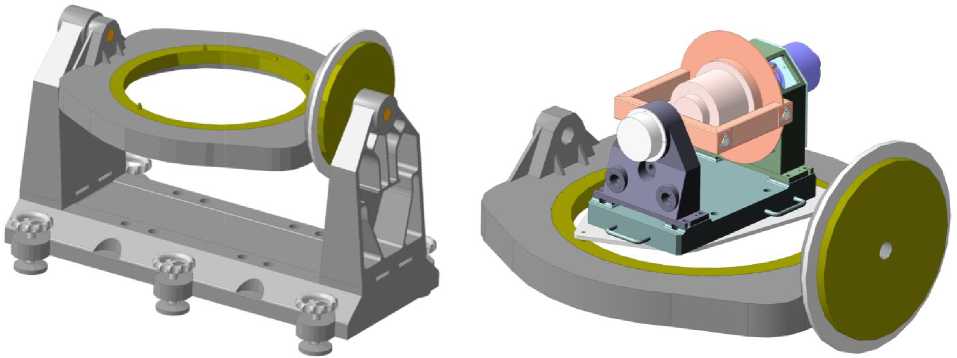
Рис. 1. Поворотный стол КИН-52
Рис. 2. Модуль вращения на столе КИН-52
Для обеспечения автоматизации вращения наклонного стола вокруг наружной оси (оси Y ) на основании стола КИН-52 устанавливается механизм наклона с электроприводом.
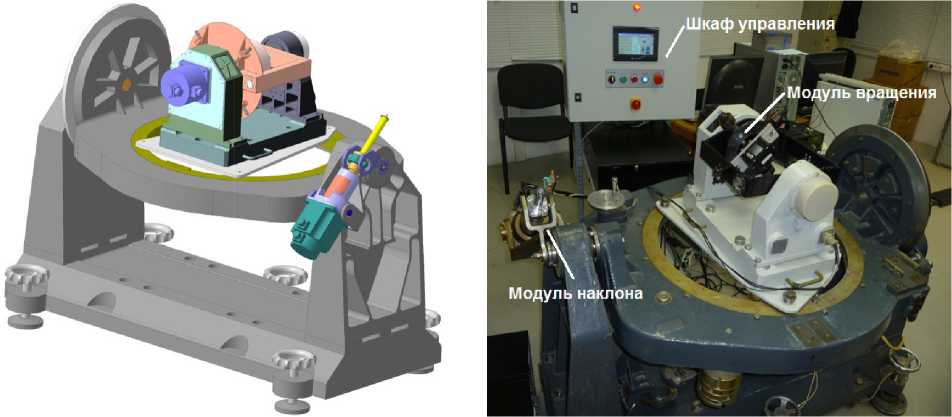
Рис. 3. Общий вид макета испытательного стенда
На столе КИН-52 закреплен модуль вращения (по оси X ), где и располагается испытуемый прибор (ИП). Общий вид установки представлен на рис. 3.
2. Конструкция испытательного стенда
Автоматизированный испытательный стенд (см. рис. 3) на базе КИН-52 состоит из двух основных частей: модуля вращения (МВ) и механизма наклона (МН).
-
2.1. Модуль вращения
Модуль вращения состоит (рис. 4) из основания 1 с опорой левой 2 и правой 3, зафиксированными на основании специальными штифтами.
Вращающаяся часть МВ представляет собой раму 4 – сварную конструкцию из алюминиевой пластины прямоугольного сечения, что обеспечивает необходимую жесткость. На раме 4 закреплен стол 5 в виде стального диска с кольцом 6 для установки ИП. Кольцо 6 предусмотрено для обеспечения возможности последующей установки ИП. В качестве ИП может быть БИБ, БИНС (бесплатформенная инерциальная система), любой датчик угловой скорости или акселерометр в произвольном положении. Стол 5 подкреплен ребрами жесткости 7 с противоположной от кольца 6 стороны. В конструкции рамы предусмотрены специальные балансировочные узлы 8 для устранения дисбаланса вращающейся части МВ, на котором установлен ИП. Конструкция стола, балансировочных узлов и электроразъемов обеспечивает удобство и безопасность установки ИП и его коммутации.
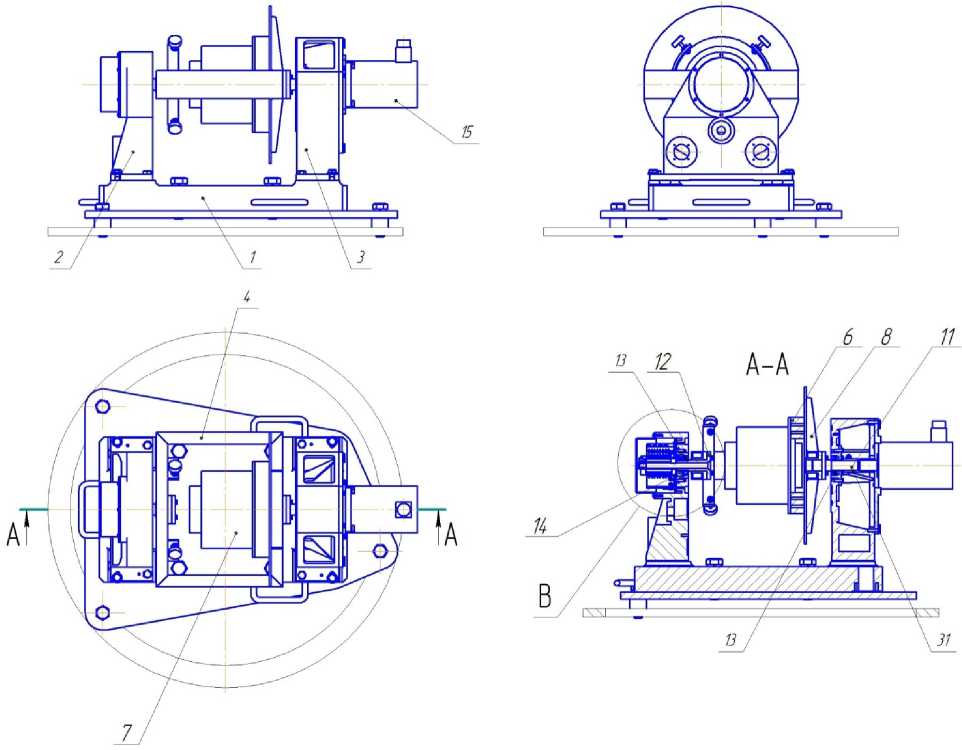
Рис. 4. Модуль вращения установки КИН-52
Рама 4 с рабочей площадкой приводится во вращение серводвигателем 11 через беззазорную сильфонную муфту 12, компенсирующую несоосность вала сервопривода и полуоси вращающейся части. Сильфонная муфта 12 имеет необходимый запас по жесткости и передаваемому моменту.
Телеметрическая информация с ИП снимается посредством щеточного узла, обеспечивающего неограниченное вращение. Щеточный узел имеет 2 канала съема информации по 8 колец каждый (всего 16 колец). Каждый канал продублирован дважды, что обеспечивает высокую надежность передачи информации.
Модуль вращения устанавливается на существующие крепежные площадки стенда КИН-52. На рабочий стол модуля вращения устанавливается испытываемый ИП. При помощи двух разъемов производится его коммутация. Посредством балансировочного узла осуществляется балансировка модуля вращения с установленным испытываемым блоком.
Приборостроение, метрология
При подключении электропитания сервоприводы устанавливают модуль вращения и поворотный механизм в заданные исходные положения. Управление сервоприводами производится через интерфейс пользователя. Во время проведения программы испытаний телеметрическая информация передается через щеточный узел модуля вращения и обрабатывается специальным программным обеспечением, расположенным на персональном компьютере (ПК) и операторной панели стенда.
-
2.2. Механизм наклона
-
2.3. Блок управления испытательного стенда
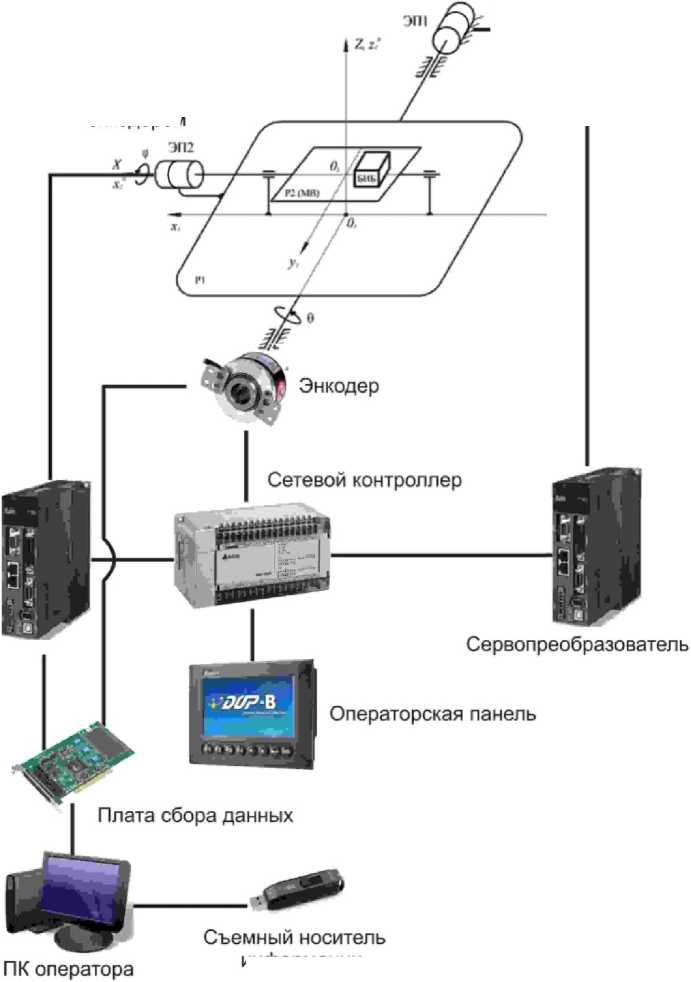
Автоматизированная система управления (АСУ) испытательного стенда представлена на рис. 6 и состоит из самого стенда (кинематическая схема), двух модулей управления синхронными электромашинами сервопривода (сервопреобразователи), программируемого логического контроллера Siemens S1214, операторной панели, дополнительного прецизионного энкодера и соот-
- ветствующих блоков питания, электрозащиты и монтажа (на рис. 6 не показано). Все блоки размещены в специальном пульте управления (см. рис. 3).
Механизм наклона рабочего стола стенда КИН-52 (рис. 5) предназначен для вращения вокруг оси Y модуля МВ и установлен на площадке крепления теодолитного кронштейна. МН обеспечивает поворотные движения стола стенда вокруг оси Y в пределах ±30° в виде синусоидальных колебаний (диапазон частот f = 0,1…5,0 Гц).
Механизм наклона приводится в движение серводвигателем мощностью 1,5 кВт. Вращение серводвигателя передается посредством упругой беззазорной муфты на винт 3 шариковинтового механизма. Серводвигатель 1, муфта 2 и винт 3 собраны в специальном корпусе 5, который имеет фланец для установки серводвигателя.
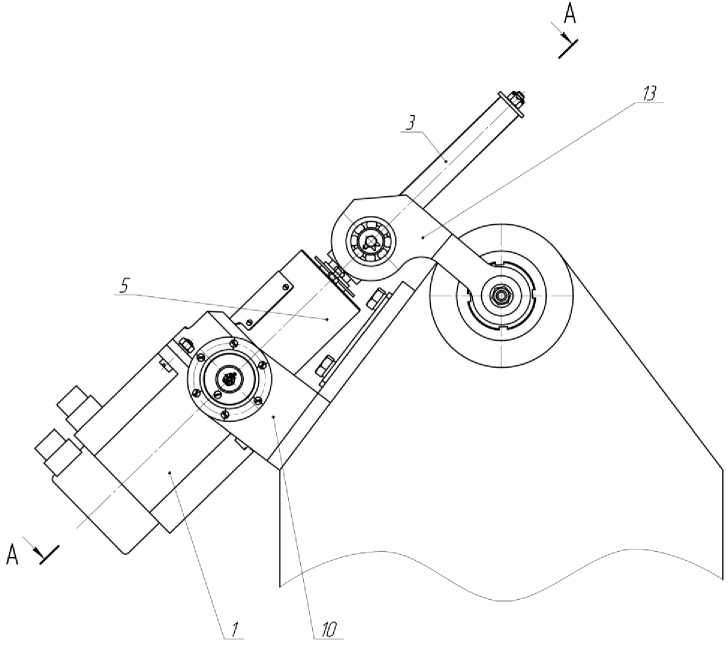
Рис. 5. Вид МН спереди
Представленное решение МН существенно упрощает конструкцию и позволяет осуществлять электромеханическое управление, как с наименьшими габаритами привода, так и оптимальными его мощностными параметрами.
Серводвигатель с встроенным энкодером
Серводвигатель с встроенным энкодером
информации
Рис. 6. Функциональная схема испытательного стенда
АСУ испытательного стенда имеет два канала: управления режимами испытаний и мониторинга переменных и параметров (см. рис. 6). В канал управления входят операторная панель, сетевой контроллер, сервоприводы и дополнительный энкодер по оси Y . В канал мониторинга – ПК, плата сбора данных, блоки сервопривода и дополнительный энкодер.
Человеко-машинный интерфейс АСУ (ЧМИ АСУ) стенда проверки ИП предназначен для выбора задания углового движения, а также отображает необходимую даталогическую информацию (данные). В ЧМИ АСУ входит операторная панель, которая размещена на лицевой части пульта управления (см. рис. 3) и представлена на рис. 7. Эта информация может дублироваться и размещаться на персональном компьютере.
Приборостроение, метрология
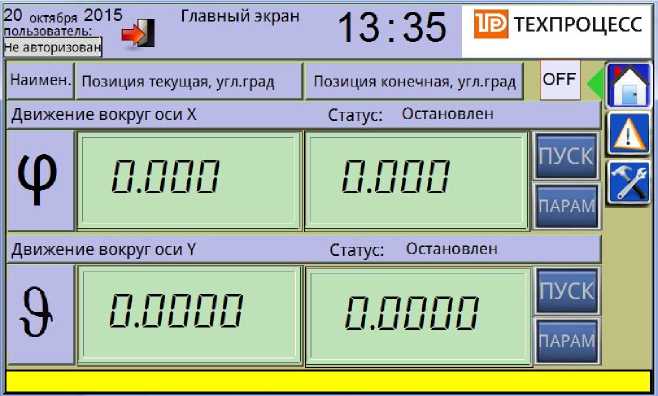
Рис. 7. Лицевая панель человеко-машинного интерфейса АСУ
Лицевая панель ЧМИ АСУ предназначена для задания режимов работы испытательного стенда (сенсорным способом).
Результаты мониторинга переменных испытательного стенда и ИП подаются непосредственно на ПК и хранятся в виде таблиц, где происходит обработка данных.
3. Математическая модель макета испытательного стенда
При составлении динамических уравнений испытательного стенда были приняты следующие исходные условия и допущения [3]:
-
– рамы и оси подвеса модуля вращения принимаются абсолютно жесткими;
-
– шарикоподшипники (ШП) по осям подвеса принимаются абсолютно жесткими; в ШП имеют место только малые контактные деформации, влияющие на моменты трения качения;
-
– приборный блок ИП жестко связан с рамой Р2 и рассматривается как твердое тело (см. рис. 6);
-
– ось х 2 внутренней рамы Р2 (см. рис. 6) является осью симметрии системы тел (рама Р2; блок БИБ), которая в данном рассмотрении также именуется как МВ;
-
– центр масс системы (Р2; ИП) находится на оси х 2 ;
-
– ось Z системы координат X , Y , Z принимается вертикальной, оси X , Y отсчётной конфигурации системы тел с двумя степенями свободы (МВ, рама Р1) принимаются горизонтальными (в виде рамы Р1 условно представлен наклонный стол стенда);
-
– ось х 2 рамы Р2 принимается параллельной оси х 1 рамы P1;
-
– электродвигатели по осям поворотов Y , x 2 являются синхронными, с постоянными магнитами; процессы в двигателях принимаются квазистационарными;
-
– инерцией механизма наклона при выводе динамических уравнений можно пренебречь;
– муфта ходовой части механизма наклона принимается абсолютно жесткой.
4. Моделирование переходных процессов
Математическая модель углового движения стенда представляет собой систему из двух уравнений, полученную с учетом указанных выше допущений, и имеет следующий вид:
(У^ + m2x2+ ^^ + ^^ -cos2ф +/ y 2 Z 2 sin2ф) 9 + ((С-У^т2ф ++2/У 2 2 2 со82ф) 6 ф =
= м Д,’^ + М сопр У1 + т 2 д (IO 1 O 2 |sin6 — IO 2 C 2 |cos6) + +m1^(%1 Ci cos9 + zl ci sin9) + (? 6 (t);
Лф + ^-62sin2ф -/v,zд2cos2ф = Мд2 + MconD + Q„(t), 2 ^2Z2 ДВХ2 С0прХ1 ^Ф где φ – угол поворота внутренней рамы Р2 вокруг оси O2x2 (оси X); θ – угол поворота наружной рамы Р1 вокруг оси Oiy 1 (оси Y); х2 = 1010212 + 102С212; A, B, C- элементы тензора инерции МВ; J(y1)y – приведённый момент инерции рамы Р1 вместе с закреплёнными на ней элементами привода (ЭП1); Jy z – центробежный момент инерции МВ в точке C2; m1, m2 – массы рамы Р1 и модуля вращения соответственно; M(1) , M(1) – приведённые к осям поворотов моменты при-двy1 двx2
водов; Mсопр , Mсопр – моменты сопротивления, основными составляющими которых являют ся моменты трения в подшипниках и токоподводах; Qθ(t), Qϕ(t) – возмущающие моменты.
Представленные уравнения движения отражают основные переменные и параметры стенда, которые необходимо корректировать перед проведением испытаний соответствующего ИП.
Разрабатываемый испытательный стенд должен совершать движение вокруг осей X и Y , при этом по оси X обеспечивать следующие параметры:
-
- вращение с угловой скоростью |ф| < 200 °/с;
-
- разгон |ф| < 16 °/с2;
-
- торможение |ф| < 16 °/с2, длительность 5.. .10 с;
-
– максимальная погрешность составляет 30″.
По оси Y должно быть обеспечено угловое движение со следующими параметрами:
-
– вращение вокруг со скоростью ϑ = ±10°;
-
– максимальная погрешность составляет 30″ в диапазоне ±30°;
-
– угловое движение в виде синусоидальных колебаний в диапазоне частот 0,1…5,0 Гц с амплитудой до 1°.
Для формирования закона изменения угловой скорости сервопривод был переведен в режим управления скоростью, кроме того, была выполнена настройка сервопривода с помощью программного обеспечения, входящего в комплект поставки сервопривода.
С целью проверки правильности настройки были проведены испытания сервопривода с механической нагрузкой (макет модуля вращения поворотного стола) и сняты зависимости угловой скорости от времени. Угловая скорость платформы определялась с помощью датчика команд (энкодера) сервопривода. Данные с датчика команд передавались в персональный компьютер (цифровой осциллограф).
При малом времени ускорения и замедления (порядка 200…500 мс) процесс имеет перерегулирование, что ограничивает частотный диапазон внешних возмущений. Данный результат отражает инерционные свойства вращающейся рамы макета модуля вращения МВ. С точки зрения быстродействия системы перерегулирование является недопустимым. Кроме того, колебательный переходный процесс вызывает недопустимо большие динамические нагрузки на элементы системы. Подавление нежелательных колебаний регулируемой величины в переходном процессе возможно при соответствующей настройке ПИД-регулятора сервопривода.
На рис. 8 представлен график плавного разгона и торможения согласно требованиям технического задания. Как видно из графических зависимостей, особых отклонений от заданной траектории движения не наблюдается.
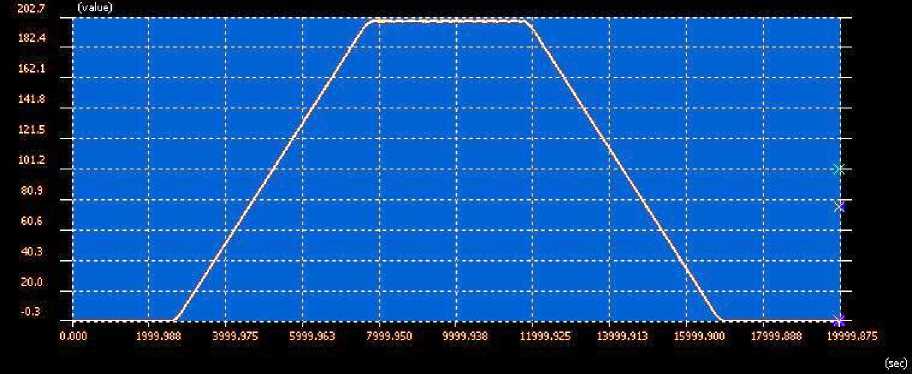
Рис. 8. График зависимости угловой скорости от времени (время разгона 5000 мс, время останова 5000 мс, <р = 200 °/с2)
Приборостроение, метрология
5. Калибровка энкодера сервопривода
В состав цепи обратной связи системы управления сервопривода входит энкодер (датчик угла), показания с которого используются для управления положением и скоростью выходного вала сервопривода. С целью проверки декларируемых изготовителем точностных характеристик энкодера, были проведены испытания, позволяющие судить о реальной точности датчика.
Калибровка энкодера осуществлялась с помощью автоколлиматора АК-0,5. Схема проведения испытаний представлена на рис. 9.
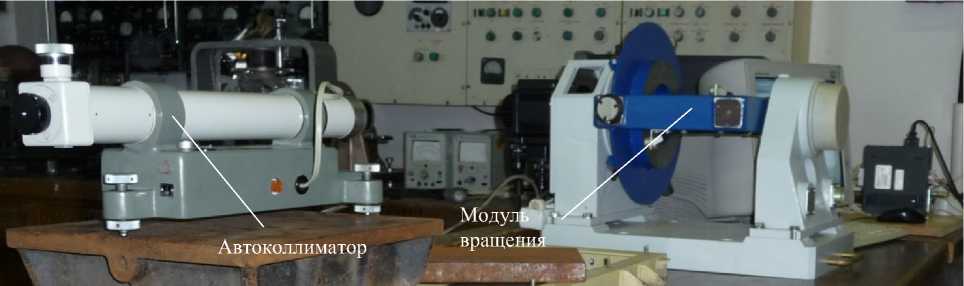
Рис. 9. Установка для калибровки энкодера
Для проведения калибровки сервопривод был переведен в режим управления положением, точность определения положения программным путем была установлена в значение 648 000 импульсов за оборот, что давало цену импульса 2″.
Калибровка включала в себя три серии измерений. В первой и во второй серии модуль вращения поворачивался на 600″ (300 импульсов) с шагом 30 импульсов, а затем в обратную сторону с этим же шагом. В третьей серии МВ поворачивался на 300″ (150 импульсов) с шагом 15 импульсов и обратно с этим же шагом. Результаты измерений представлены в табл. 1–3.
Таблица 1
Первая серия измерений
|
Показания энкодера (1 импульс = 2″) |
Показания автоколлиматора, угловые секунды |
Разность показаний, угловые секунды |
|||
|
Импульсы |
Угловые секунды |
Разворот МВ |
Разворот МВ в обратную сторону |
Разворот МВ |
Разворот МВ в обратную сторону |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
30 |
60 |
60 |
60 |
0 |
0 |
|
60 |
120 |
120 |
120 |
0 |
0 |
|
90 |
180 |
177 |
180 |
3 |
0 |
|
120 |
240 |
237 |
240 |
3 |
0 |
|
150 |
300 |
297 |
300 |
3 |
0 |
|
180 |
360 |
357 |
360 |
3 |
0 |
|
210 |
420 |
417 |
420 |
3 |
0 |
|
240 |
480 |
478 |
480 |
2 |
0 |
|
270 |
540 |
538 |
540 |
2 |
0 |
|
300 |
600 |
598 |
598 |
2 |
2 |
Таблица 2
Вторая серия измерений
|
Показания энкодера (1 импульс = 2″) |
Показания автоколлиматора, угловые секунды |
Разность показаний, угловые секунды |
|||
|
Импульсы |
Угловые секунды |
Разворот МВ |
Разворот МВ в обратную сторону |
Разворот МВ |
Разворот МВ в обратную сторону |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
30 |
60 |
59 |
60 |
1 |
0 |
|
60 |
120 |
119 |
120 |
1 |
0 |
|
90 |
180 |
179 |
180 |
1 |
0 |
|
120 |
240 |
239 |
240 |
1 |
0 |
|
150 |
300 |
299 |
300 |
1 |
0 |
|
180 |
360 |
359 |
360 |
1 |
0 |
|
210 |
420 |
419 |
420 |
1 |
0 |
|
240 |
480 |
479 |
480 |
1 |
0 |
|
270 |
540 |
539 |
540 |
1 |
0 |
|
300 |
600 |
599 |
599 |
1 |
1 |
Таблица 3
Третья серия измерений
|
Показания энкодера (1 импульс = 2″) |
Показания автоколлиматора, угловые секунды |
Разность показаний, угловые секунды |
|||
|
Импульсы |
Угловые секунды |
Разворот МВ |
Разворот МВ в обратную сторону |
Разворот МВ |
Разворот МВ в обратную сторону |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
15 |
30 |
29 |
30 |
1 |
0 |
|
30 |
60 |
59 |
60 |
1 |
0 |
|
45 |
90 |
88 |
90 |
2 |
0 |
|
60 |
120 |
120 |
120 |
0 |
0 |
|
75 |
150 |
149 |
150 |
1 |
0 |
|
90 |
180 |
179 |
178 |
1 |
2 |
|
105 |
210 |
210 |
209 |
0 |
1 |
|
120 |
240 |
240 |
240 |
0 |
0 |
|
135 |
270 |
270 |
270 |
0 |
0 |
|
150 |
300 |
300 |
300 |
0 |
0 |
Полученная таким образом разность показаний автоколлиматора и энкодера не превышает 3″, что соответствует заявленной изготовителем точности и требованиям технического задания.
Заключение
В соответствии с требованиями к испытательным поворотным стендам были успешно решены следующие задачи: создано вращение на 360° по оси X и повороты на ± 30° по оси Y . Проведены натурные испытания углового движения при различных режимах: разгон и торможение, гармонические колебания, при ступенчатом и импульсном воздействии по осям X и Y стенда.
Представленный испытательный стенд обеспечивает угловую скорость вращения по оси X 200 °/с при ускорении разгона и торможения до 16 °/с2. Гармонические колебания – от 0,1 до 5 Гц при амплитуде до 1° по осям X и Y . Точность позиционирования обеспечивается до 3″ по оси X и до 7,5″ по оси Y .
Приборостроение, метрология
Список литературы Автоматизация двухосевого поворотного стола КИН-52
- Герман-Галкин, С.Г. Проектирование мехатронных систем на ПК/С.Г. Герман-Галкин. -СПб.: Корона-Век, 2008. -368 с.
- Прецизионные управляемые стенды для динамических испытаний гироскопических приборов/Д.М. Калихман; под общ. ред. акад. В.Г. Пешехонова -СПб.: ГНЦ РФ ЦНИИ «Электоприбор», 2008. -296 с.
- Разработка стендовой аппаратуры для испытания бесплатформенного инерциального блока в условиях углового движения: отчет о НИР (заключ.): № госрегистрации 01201366262/Рук. В.В. Седышев; исполн. А.Н. Лысов -Челябинск. 2014. -91 с.
- Carter, R. Weighted Least-Squares Based Control for a Four Axis Gimbal Set/R. Carter, P. Duffey, S. Bachorski, M. Kagi, H. Havlicsek//Proceedings of SPIE. -2010. -Vol. 7663. -P. 1-12.
