Автоматизация группы питательных насосов в транспортабельной котельной установке

Автор: Кускарбекова Сулпан Ириковна, Максимов Никита Максимович, Осинцев Константин Владимирович
Рубрика: Автоматизированные системы управления технологическими процессами
Статья в выпуске: 2 т.23, 2023 года.
Бесплатный доступ
Модернизация систем автоматического управления электрических устройств играет важную роль с точки зрения энергоэффективности и энергосбережения при эксплуатации теплоэнергетических установок. Разработка учебного лабораторного стенда, который имитирует работу прямоточного парового котла змеевикового типа в составе транспортабельной котельной установки, позволила внедрить систему автоматического управления питательным насосом с помощью внедрения контроллера, частотного привода и управления устройством посредством программы SCADA. На основе экспериментальных данных в результате работы учебного лабораторного стенда предложена идея по созданию автоматизированной системы управления группой питательных насосов для прямоточных паровых котлов змеевикового типа, которые эксплуатируются в составе транспортабельной котельной установки на нефтепромысловой площадке. Данная установка и котельный агрегат приняты за базовые модели при проектировании учебного лабораторного стенда. Цель работы заключается в создании схемы автоматизации группы насосов транспортабельной котельной установки, используя экспериментальные данные с учебного лабораторного стенда, а также приняв во внимание теоретическую и практическую составляющую по применению автоматизации всей или части группы питательных насосов с точки зрения энергоэффективности и энергосбережения. Материалы и методы содержат информацию о создании и адаптации математической модели для описания работы насосов с учетом гидравлических сопротивлений, которые возникают за счет змеевиков котла - навитых труб сложной формы в виде коаксиального цилиндра. Результаты работы отражены в виде алгоритмической структурной схемы блока насоса и принципиальной схемы автоматизации группы насосов котельной установки. В ходе работы предложен перечень оборудования для модернизации системы управления блоком питательных насосов. В заключении рассмотрены перспективы дальнейшей разработки в данной области, приведены преимущества разделения насосов на подгруппы, такие как основные - регулируемые и вспомогательные - нерегулируемые, а также положительные аспекты в использовании частотного регулирования для основных насосов в составе эксплуатируемой котельной установки.
Программируемый логический контроллер, электропривод, scada, асу тп, прямоточные котлы
Короткий адрес: https://sciup.org/147240885
IDR: 147240885 | УДК: 681.5.011 | DOI: 10.14529/ctcr230207
Automation of a group of feed pumps in a transportable boiler plant
Modernization of automatic control systems of electrical devices plays an important role in terms of energy efficiency and energy saving in the operation of thermal power plants. The development of an educational laboratory stand, which simulates the operation of a direct-flow steam boiler of a coil type as part of a transportable boiler plant, allowed the introduction of an automatic control system for a feed pump with the help of the introduction of a controller, a frequency drive and control of the device through the SCADA program. Using experimental data as a result of the work of the educational laboratory stand, the idea of creating an automated control system for a group of feed pumps for direct-flow steam boilers of the coil type, which are operated as part of a transport boiler plant at an oilfield site, is proposed. This installation and boiler unit are taken as basic models when designing a training laboratory stand. The purpose of the work is to create an automation scheme for a group of pumps of a transportable boiler plant, using experimental data from an educational laboratory stand, as well as taking into account the theoretical and practical component for the use of automation of all or part of a group of feed pumps from the point of view of energy efficiency and energy saving. Materials and methods contain information on the creation and adaptation of a mathematical model to describe the operation of pumps, taking into account hydraulic resistances that arise due to boiler coils - wound pipes of complex shape in the form of a coaxial cylinder. The results of the work are reflected in the form of an algorithmic block diagram of the pump unit and a schematic diagram of the automation of a group of pumps of a boiler plant. In the course of the work, a list of equipment for upgrading the control system of the feed pump unit was proposed. In conclusion, the prospects for further development in this area are considered, the advantages of dividing pumps into subgroups are given, such as the main - regulated and auxiliary - unregulated, as well as positive aspects in the use of frequency control for the main pumps as part of the operated boiler plant.
Текст научной статьи Автоматизация группы питательных насосов в транспортабельной котельной установке
Транспортабельная котельная установка (далее по тексту – ТКУ) на базе паровых прямоточных котлов змеевикового типа эксплуатируется на северном месторождении Варь-Еган. Во время режимно-наладочных испытаний и сезонной работы возникла необходимость в модернизации системы управления группы питательных насосов.
Группа питательных насосов отвечает за подачу химически очищенной воды в паровые прямоточные котлы змеевикового типа [1]. В котлах данного типа из-за конструктивных особенностей возникает высокое гидравлическое сопротивление [2]. Во время работы оператор паровых котлов обязан следить за стабильной работой котлов и за давлением, создаваемым насосами. На данный момент в существующей транспортабельной котельной установке управление подобными насосами осуществляется с помощью базовой автоматизации, которая заключается во включении или отключении насосов, изменении частоты двигателя с помощью потенциометра [3]. Это неэффективно из-за отсутствия на панели управления информации об оборотах двигателя в зависимости от нагрузки и защитных функций по нескольким параметрам [4].
Группа питательных насосов включает в себя 4 насоса по 2 на каждый котел. Каждая подгруппа подключена последовательно к каждому котлу для поддержания стабильного напора (рис. 1).
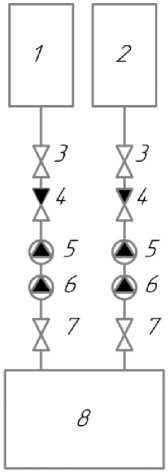
Рис. 1. Часть принципиальной схемы ТКУ: 1, 2 – паровой котел; 3, 7 – запорная арматура; 4 – обратный клапан; 5, 6 – питательные насосы;
8 – питательная емкость
Fig. 1. Part of the schematic diagram of the boiler plant: 1, 2 – steam boiler; 3, 7 – shut–off valves; 4 – return valve; 5, 6 – feed pumps; 8 – feed tank
По опытным данным, полученным во время эксплуатации котельной в реальных условиях, был создан учебный лабораторный стенд, который имитирует работу прямоточного парового котла змеевикового типа (рис. 2) [5].
В состав основного оборудования стенда входит насос, расходомер, вентилятор и датчики давления. Стенд автоматизирован (рис. 3). Шкаф управления состоит из следующего оборудования: программируемый логический контроллер (далее по тексту – ПЛК), частотный привод и вспомогательное оборудование. ПЛК подключается к компьютеру, на котором установлена программа SCADA. С помощью нее управляющий стендом может запускать, отключать и менять режимы работы основного оборудования с виртуального рабочего стола на компьютере (далее по тексту – ПК).
Программа также сигнализирует о превышении параметров: обороты двигателя, давление в змеевике. После предупреждения двигатель насоса отключается в безопасном режиме. Основное электрическое оборудование также защищено от перепадов напряжения с помощью реле. Все параметры записываются и сохраняются в электронном виде.

Рис. 2. Фото лабораторного стенда Fig. 2. Photo of the laboratory stand

Рис. 3. Фото шкафа управления лабораторного стенда
Fig. 3. Photo of the control cabinet of the laboratory stand
Автоматическая система управления стендом показала хорошие результаты во время экспериментов: постоянная связь контроллера с ПК, реагирование на внесенные параметры с минимальным промежутком времени, сохранение всей информации в электронном журнале в режиме онлайн и простота интерфейса. Удобство в изменении параметров гидравлической системы на удаленном расстоянии позволило оценить перспективы разработки подобного управления для котельной. Плавное изменение характеристик двигателей насосов позволит снизить потребление электроэнергии, откроет возможности в регулировании работы котлов в соответствии с режимными картами в более точном диапазоне, что скажется на расходе топлива и увеличении энергоэффективности котельной в целом [6].
Процесс регулирования группы питательных насосов представляет собой несколько вариаций: параллельное включение регулируемых и нерегулируемых насосов, работа полностью регулируемых или нерегулируемых групп. Существуют исследования по параллельной работе регулированного и нерегулируемого насосных агрегатов, об эффективности применения частотного привода, что отмечено в работах Р.С. Новикова, В.Е. Прокофьева, К.В. Яновича [7]. Вопросы эксплуатации частотно-регулируемого привода в промышленности, использование котроллера, выявленные положительные аспекты опытного исследования в области энергосбережения раскрывают в своей работе Химани Праджапати, Свапнил Арья, Джейдипсин Бария [8]. Научные труды А.А. Прокопова, Р.А. Кахорова, В.А. Новикова, М.П. Белова содержат разработки базы математических моделей компонентов электроприводных систем насосных агрегатов, которые могут быть использованы для оптимизации системы управления данных устройств [9]. Однако в работах приведены общие решения, без учета особенностей сопротивлений со стороны потребителей после насосов, что влияет на динамические и энергетические характеристики насосной группы. Исследование гидравлических сопротивлений в каналах разной формы представлено в работах Бастьяна Раппа [10], Н.А. Войнова, Д.А. Земцова, А.В. Богатковой, Н.В. Дерягины [11]. В рассматриваемом случае в котельной установке большое сопротивление по гидравлической системе возникнет со стороны котлов, так как змеевики парового агрегата представляют собой навитые трубы в форме коаксиального цилиндра. Таким образом, системы автоматического регулирования группой насосов в транспортабельной котельной установке требуют совершенствования.
Теоретическая часть
Для определения расхода в момент времени необходимо руководствоваться базовой формулой о давлении:
p = p- g • H i , (1)
где p - плотность теплоносителя, кг/м3;
g – ускорение свободного падения, м/с2;
Hi – напор, м.
Если рассматривать напорную характеристику насоса, который работает с изменяющейся
частотой вращения рабочего колеса, то уместна формула [9]:
Pi = P о •
| V toном V
—
p 0 p ном
2 ном
• Q<
где p 0 – давление насоса холостого хода, МПа;
p – номинальное давление насоса, МПа; ном toi - текущая скорость рабочего колеса на выходе из насоса, об/мин;
ю ном - номинальная скорость рабочего колеса на выходе из насоса, об/мин;
Q ном – номинальная подача насоса, м3/с;
Qi – текущая подача насоса, м3/с;
R
_ p 0 p ном
= Q2
ном
– принять как гидравлическое сопротивление насоса.
Первое слагаемое уравнения (2) можно выразить в виде формулы как давление холостого хода при любой скорости вращения рабочего колеса насоса:
p0 •
ю i
V toном V
= k„
p0
• to 2 .
Если рассматривать коаксиальные змеевики прямоточного парового котла как самое большое сопротивление для работы насоса, то можно выразить характеристику сети:
Р с = P п + pm“2 p п < Q з , Q ном
где pп – противодавление, которое обусловлено в данном случает из-за разности геодезических высот между питательным баком и насосами, МПа;
Qз – расход в змеевиках прямоточного парового котла, м3/с.
R з
p ном p п
0"
ном
– принять как гидравлическое сопротивление змеевиков котла;
^ - коэффициент сопротивления змеевика в местах изгиба, адаптированный впервые для прямоточного парового котла змеевикового типа.
Решая совместно уравнения (1), (2) и (4), можно получить расход теплоносителя без учета временной характеристики:
Q i - Q ном
•
® i | PiI -~
V ю ном ) p 0
1 - P^
p 0
Если внедрить в уравнение (5) время и выразить для прямоточного парового котла змеевико- вого типа, то оно примет вид:
-y- -f у У[ p l + p 0 - p с -( R S ) • Q i ] , d т VP^ L )
где т - время;
s – сечение трубопровода, м2;
L – длина трубопровода, м;
p 1 – давление на всасе трубопровода насоса, МПа;
R Σ – сумма гидравлических сопротивлений.
Для решения поставленных задач рассматривается осуществление системы автоматического регулирования насосной группы. Каждое устройство может быть изображено в виде единичной динамической системы из структурной схемы (рис. 4).
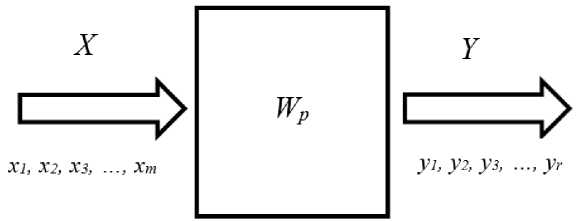
Рис. 4. Представление переменных динамического звена Fig. 4. Representation of dynamic link variables
Данное звено описывается уравнением Лапласа, где передаточная функция W p может быть выражена уравнением [12]:
W p
У(P) x(P),
где x и у - входная и выходная переменные.
Зная переходную характеристику (8), которая обусловлена единичным воздействием на звено (9), можно судить о динамических свойствах системы (10), применяя преобразования Лапласа:
y = h (t);
f 0, t < о x ( t ) = ;
[ 1, t > о
^ 1 W. W
x(p)= e p • dt = ; h(p)= p; h(t)^ p.
0 ppp
Так и м образ ом, в озмо жно вычисление реакции передаточной функции н а да н н ое ед и н и чн ое воздействие.
У чи ты в ая в ыш е с к аза нн ое , с хе му м оду ля комп о н е нта – насоса – можно изобразить в виде рис. 5.
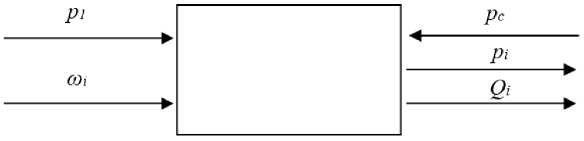
Рис. 5. Схема модуля компонента Fig. 5. Component module diagram
Изме н е н и е час тоты в ращ е ния рабочего колеса насосного агрегата при в од и т к и зме н е н ию в се х е го ра бочи х ха р а к тери с ти к .
Ал гори т ми че ск ая струк ту рная схема работы насоса представлена на рис. 6.
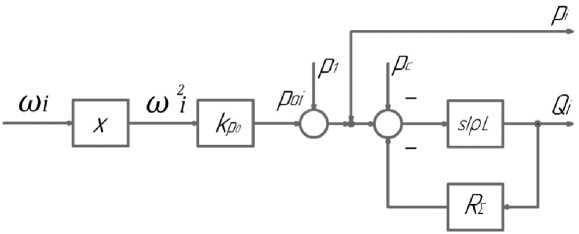
Рис. 6. Алгоритмическая структурная схема блока насосной группы Fig. 6. Algorithmic block diagram of the pump group unit
Практическая часть
Проанали зиров а в ра б оту ла б ор а торн ого с т е н д а и Т К У при рабочих условиях, выявили, что мож но п рин ять н ас осы 5 ( с м. рис . 1) ос н ов н ыми , а 6 – вспомогательными в соответствии с на г рузк ой п ри ра б оте к отл ов . Ис пользовав представленные теоретические выр а же н и я, д а н на я тео р ия п ре дло же н а с це лью з а щ и ты обору д ов а н и я от постоянных перепадов напряжения и снижения за г ружен ности п итающе й с е ти ( р ис. 7), которые часто происходят на объекта х, а т а кже эк он оми и ка п и т альных за тр а т н а о б ору д ов а н и е , реш е н и е о б у с та н ов к е ч а с тотн о -регулируемого электропривода в роли основной пары питательных насосов, в качестве вспомогател ьн ых – неуправляе мы й э л е к троп ри в од, пол учаю щ и й п и та н и е на п рямую от пи та ющ ей сети.
Управление частотно- р ег ул ируемым приводом будет осуществляться с пом о щь ю ч аст о т но го пр ео бр аз о ват ел я со единен ны м с П Л К пут ем з адания необходимой частоты вращения вала двигате л я дл я по ддер ж ания нео б х о дим о го давления в системе. Информация о состоян ии давл ен ия в каж д ом из ко т л о в будет по ступат ь от датчиков давления, установленных на входе ко т л ов. В сл уч ае, есл и нео бх о дим о е давл ен ие в о дном из котлов не обеспечивается основным насосом, в работу вкл юч ает ся вспо м о г ат ел ь ный насос с помощью магнитного пускателя после подач и на ег о кат ушку сиг нал а упр авл ения. Усл о вием вк лючение вспомогательного насоса является пр евы шение уст ановленного значения т о ка ст ат о р а основного насоса. После того как вспомогател ь ны й насо с вы х о дит на н о м инал ь ны й р еж им рабо т ы , происходит регуляция выходной частоты вращения о сно вно г о н а со са. Дл я з ащит ы вспо м ог ат ел ь н ых насосов предусмотрена установка тепловог о р ел е и авт о м ат ический вы кл юч ат ел ь . Та к им о бр а зом осуществляется регулирование давления н а пар о вы х ко т л ах.
Энергосберегающий эффект (от ЧРП)
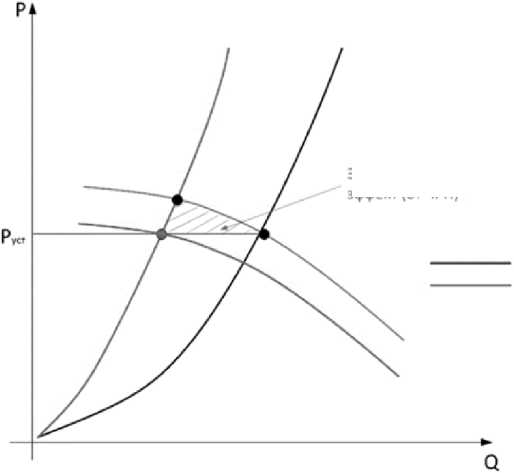
Р- давление
Q- подача без частотного регулирования с частотным регулированием
Рис. 7. Зависимость подачи от давления с частотным и без частного регулирования Fig. 7. Dependence of supply on pressure with frequency and without private regulation
Необ ход и мо в н е дри ть в с х ему расходомер для измерения количества п рохо д ящ е го те плон оси те ля че р е з о б а к отла пу те м его установки в общую линию сразу после п и та те льн ой е мк о с ти 8 (см. ри с. 1) , к о торая п ос ле б у д ет разветвляться после на два потока для двух ко т лов соо т в е тс т в е нн о.
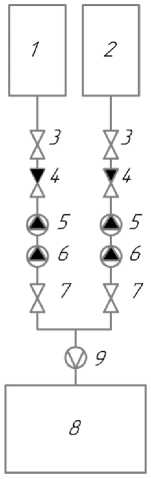
Рис. 8. Часть принципиальной схемы ТКУ: 1, 2 – паровой котел; 3, 7 – запорная арматура; 4 – обратный клапан; 5, 6 – питательные насосы;
8 – питательная емкость; 9 – расходомер Fig. 8. Part of the schematic diagram of the boiler plant: 1, 2 – steam boiler; 3, 7 – shut-off valves; 4 – check valve; 5, 6 – feed pumps; 8 – feed tank;
9 – flow meter
В соответствии с вышесказанным поставлены следующие задачи для создания автоматизации системы управления группой питательных насосов в ТКУ [13]:
-
1) создание единой панели управления, которая будет включать верхний и нижний уровни: включение и отключение плановое, задание количества оборотов, сигнализацию и отключение аварийное при превышении параметров (по скорости двигателя);
-
2) регулирование текущих параметров с записью в виртуальный журнал на компьютере;
-
3) переключение работы каждого насоса и подгрупп;
-
4) автоматическое изменение оборотов двигателя насоса в зависимости от необходимой нагрузки на котлы.
На основании поставленных задач можно выделить следующие основные узлы в цепи управления на начальной стадии проектирования [14]:
-
1) узел включения и отключения;
-
2) узел пуска;
-
3) узел торможения;
-
4) узел защиты;
-
5) узел автоматического технологического процесса.
Оборудование, входящее в перечисленные уз- лы: частотный преобразователь, ПЛК, электромагнитный пускатель, тепловое реле, автоматические выключатели, датчики давления, расходомер, преобразователь напряжения. На рис. 8 представлена часть принципиальной схемы ТКУ после внедрения расходомера, а на рис. 9 изображена принципиальная схема автоматизации группы насосов транспортабельной котельной установки.
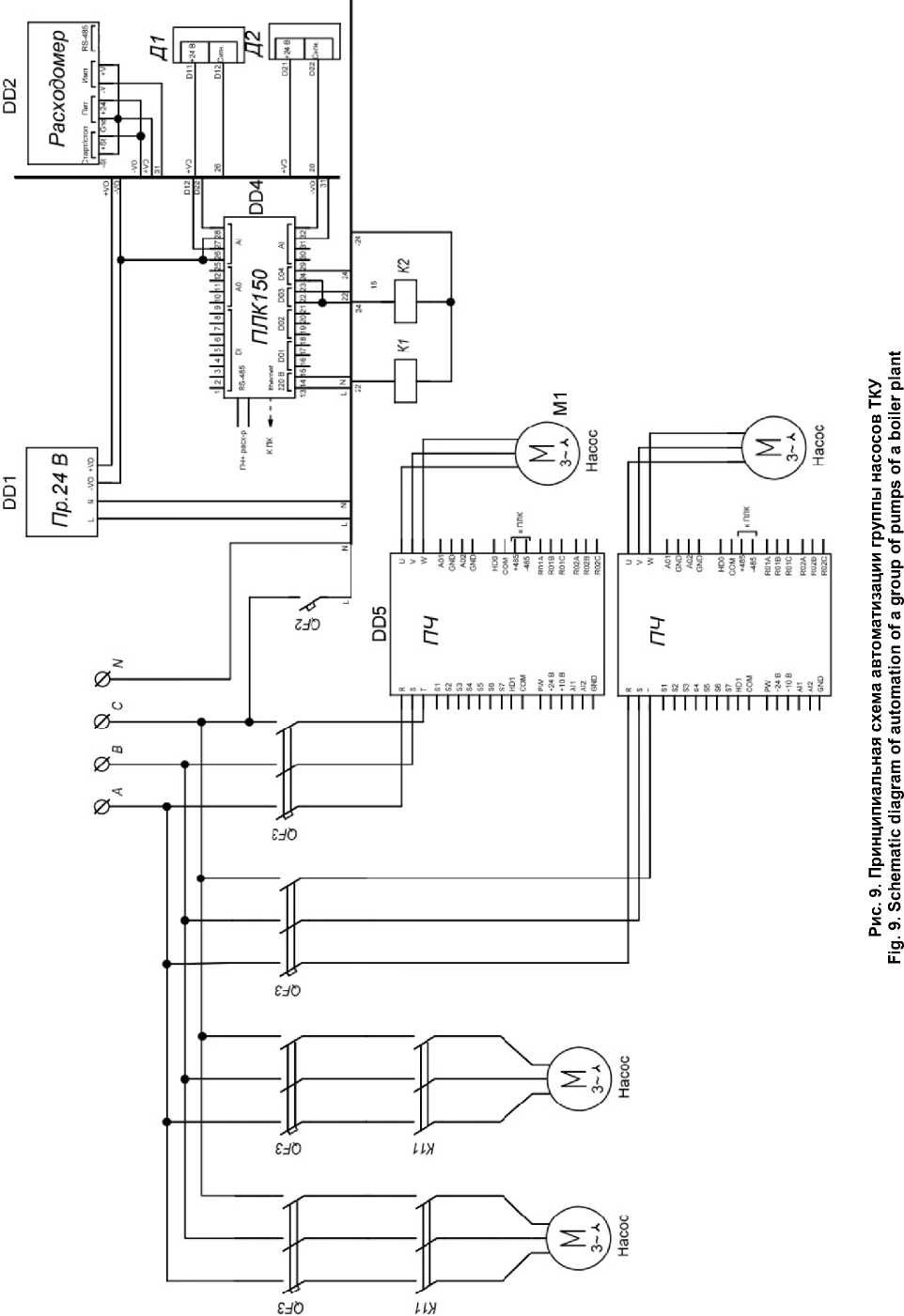
Использование ПЛК в данной схеме обусловлено функциональными возможностями [15]:
-
1) легкость в управлении через компьютер с человеко-машинным интерфейсом;
-
2) увеличение надежности системы автоматизации;
-
3) моментальное реагирование при изменении состояния системы и параметров.
Динамическое торможение осуществляется по принципу скорости – в зависимости от скорости двигателя.
Заключение
Таким образом, на основе опыта проектирования, автоматизации и управления лабораторным стендом, который имитирует работу прямоточного парового котла змеевикового типа, была предложена схема автоматического управления группой питательных насосов для транспортабельной котельной установки, в которой эксплуатируются подобные котлы.
Математическая модель адаптирована для насосов, которые работают с большим гидравлическим сопротивлением со стороны змеевиковых элементов. С помощью уравнений Лапласа возможно вычисление реакции передаточной функции на данное единичное воздействие. Также в работе получена алгоритмическая структурная схема блока насосной группы. Аналогично можно рассмотреть и для других блоков алгоритмические структурные схемы, которые могут описывать динамические и энергетические характеристики в системе управления группой насосов, а впоследствии формирующие полный процесс управления.
Представленная принципиальная схема автоматизации группы насосов ТКУ включает в себя только частотное регулирование основных насосов, давления на входе, а также расход теплоносителя. Управление возможно осуществлять с помощью ПК через виртуальный стол в программе SCADA. Деление насосов на регулируемые и нерегулируемые позволит снизить затраты на капитальные вложения, получить наилучший эффект по энергосбережению, а также повысить эффективность использования основного и вспомогательного оборудования котельной установки.
Список литературы Автоматизация группы питательных насосов в транспортабельной котельной установке
- Dyakonov E., Mikhailov V., Usikov N. Design of boiler plants (past, present and possible future) // American scientific journal. 2020. Vol. 1, no. 43. P. 51-55. DOI: 10.31618/asj.2707-9864.2020.1.43.52
- Малахов А.В., Савиных И.А. Конструктивно-технологические особенности и комплектация блочно-модульных котельных установок // Транспортные системы. 2017. № 2 (5). С. 60-64. DOI: 10.46960/62045_2017_2_60
- Дудкин М.М., Осинцев К.В., Кускарбекова С.И. Опытное исследование работы парового котла змеевикового типа при эксплуатации на северном нефтяном месторождении // Вестник ЮУрГУ. Серия «Энергетика». 2019. Т. 19, № 4. С. 14-25. DOI: 10.14529/power190402
- Кауанов А.С., Паршина Г.И., Сичкаренко А.В. Разработка методики исследования работы насосных установок на базе стенда-имитатора // Вестник ToU: Энергетическая серия. 2021. № 1. С. 152-162. DOI: 10.48081/TFDT5813
- Осинцев К.В., Кускарбекова С.И. Разработка автоматизированной системы управления для учебного лабораторного стенда // Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». 2022. Т. 22, № 3. С. 141-150. DOI: 10.14529/ctcr220313
- Регулирование нагрузки и обеспечение экономичности паровых котлов с экстремальным регулятором / В.Р. Сабанин, В.И. Кормилицын, В.И. Костык и др. // Теплоэнергетика. 2014. № 12. С. 63-69. DOI: 10.1134/S0040363614110071
- Новиков Р.С., Прокофьев В.Е., Янович К.В. Параллельная работа регулируемого и нерегулируемого насосных агрегатов // Актуальные проблемы военно-научных исследований. 2020. № 6 (7). С. 175-184.
- Prajapati Himani, Arya Swapnil, Baria Jaydeepsinh C. Variable Frequency Drive // Advances in Power Generation from Renewable Energy Sources (APGRES). SSRN Electronic Journal. 2019. DOI: 10.2139/ssrn.3442439
- Математические модели электроприводных систем насосных агрегатов и станций / А.А. Прокопов, Р.А. Кахоров, В.А. Новиков, М.П. Белов // Известия СПбГЭТУ «ЛЭТИ». 2017;10:44-54.
- Rapp Bastian E. Chapter 17 - Hydraulic Resistance // Microfluidics: Modelling, Mechanics and Mathematics. Elsevier, 2017. P. 351-370. DOI: 10.1016/B978-1-4557-3141-1.50017-4
- Study of hydraulic resistance of tangential swirlers / N.A. Voinov, D.A. Zemtsov, A.V. Bo-gatkova, N.V. Deryagina // Journal of Physics: Conference Series. 2021. Vol. 2094 (5). P. 052029. DOI: 10.1088/1742-6596/2094/5/052029
- Сафиуллин Р.К. Основы автоматики и автоматизация процессов. Казань: Изд-во Казанск. гос. архитектур.-строит. ун-та, 2013. 187 с.
- Терехов В.М., Осипов О.И. Системы управления электроприводов. М.: Издат. центр «Академия», 2006. 304 с.
- Анучин А.С. Системы управления электроприводов. М.: Издат. дом МЭИ, 2015. 371 с.
- Антропов Я.А., Кретов Я.А. Особенности работы и методы регулирования питательных насосов // Технические науки: проблемы и решения: сб. ст. по материалам LXI Междунар. науч.-практ. конф. 2022. № 6 (56). DOI: 10.32743/2587862X.2022.6.56.342611
