Автоматизация мониторинга строительных работ на основе лазерного сканирования с беспилотных воздушных судов

Автор: Рада А.О., Кузнецов А.Д., Зверев Р.Е., Тимофеев А.Е.
Журнал: Нанотехнологии в строительстве: научный интернет-журнал @nanobuild
Рубрика: Результаты исследований ученых и специалистов
Статья в выпуске: 4 т.15, 2023 года.
Бесплатный доступ
Введение. Существующие публикации и технологии по цифровому моделированию объектов строительства предполагают значительные затраты и длительность выполнения работ. Для мониторинга и контроля значительного количества объектов необходима разработка технологий лазерного сканирования только с беспилотных воздушных судов без наземной съемки. Материалы и методы. В исследовании использовано беспилотное воздушное судно типа «гексакоптер» с лазерным сканером, специализированное программное обеспечение для работы с данными аэрофотосъемки и лазерного сканирования, в том числе разработанное авторами. При разработке алгоритма сравнения облаков точек использован метод октантов. Результаты и обсуждение. В ходе исследования разработана технология автоматизации мониторинга и контроля строительных работ, в соответствии с которой однократно выполняется аэрофотосъемка и строится ортофотоплан объекта (для размещения данных лазерного сканирования). Затем с определенной периодичностью проводится лазерная съемка с беспилотного воздушного судна, формируются плотные облака точек на разные даты. Для их сравнения разработан линейный вычислительный алгоритм, который по данным о двух плотных облаках точек позволяет получить результирующее облако, которое отражает прогресс в выполнении строительных работ. Особенностью алгоритма является то, что поиск точек ведется не по всему облаку, а в границах октантов. Это ускоряет обработку данных и снижает нагрузку на вычислительные мощности. Технология получила программную реализацию в веб-приложении «Система управления мониторингом строительных работ на объектах, прошедших государственную экспертизу». Она дает возможность пользователю быстро получить визуальное представление об изменении строительного объекта за выбранный период, провести все необходимые измерения (координат, геометрических параметров, расхода материалов и др.). Выводы. Разработанная технология автоматизации мониторинга строительных работ может использоваться застройщиками, заказчиками, государственными и муниципальными органами власти для быстрого получения информации в целях контроля и поддержки принятия управленческих решений.
Строительные работы, строительный контроль, лазерное сканирование, цифровые технологии, беспилотное воздушное судно, информационная модель здания, плотные облака точек
Короткий адрес: https://sciup.org/142238810
IDR: 142238810 | УДК: 69.002.5 | DOI: 10.15828/2075-8545-2023-15-4-373-382
Automation of monitoring construction works based on laser scanning from unmanned aerial vehicles
Introduction. Current publications and technologies for digital modeling of construction projects often entail considerable expenses and lengthy project timelines. In order to effectively monitor and control a large number of objects, there is a need to develop laser scanning technologies specifically for unmanned aerial vehicles, eliminating the need for ground-based imaging. Materials and methods. The study employed a hexacopter-type unmanned aerial vehicle equipped with a laser scanner, as well as specialized software for processing aerial imagery and laser scanning data, which included tools developed by the authors. The octant method was utilized when developing an algorithm for point cloud comparison. Results and discussion. In the course of the study, a technology for automating the monitoring and control of construction work was developed, in accordance with which aerial photography is performed once and an orthophotomap of the object is built (to accommodate laser scanning data). Then, with a certain frequency, laser surveys are carried out from an unmanned aerial vehicle, dense clouds of points are formed for different dates. To compare them, a linear computational algorithm has been developed, which, using data on two dense point clouds, allows obtaining the resulting cloud, which reflects the progress in the construction work. A feature of the algorithm is that the search for points is not carried out over the entire cloud, but within the boundaries of octants. This speeds up data processing and reduces the load on computing power. The technology received software implementation in the web application "Management system for monitoring construction work at facilities that have passed the state examination." It allows the user to quickly get a visual representation of the change in the construction object for the selected period, to carry out all the necessary measurements (coordinates, geometric parameters, material consumption, etc.). Conclusions. The developed technology for automating the monitoring of construction work can be used by developers, customers, state and municipal authorities to quickly obtain information in order to control and support managerial decision-making.
Текст научной статьи Автоматизация мониторинга строительных работ на основе лазерного сканирования с беспилотных воздушных судов
С овременный этап развития строительной отрасли характеризуется постепенным внедрением цифровых технологий, на которые возлагается решение ряда производственных задач, ранее выполнявшихся «вручную» (то есть непосредственно человеком) [1–3]. В качестве основных преимуществ цифровых технологий в строительстве следует назвать высокую точность, скорость и полноту получения необходимой для принятия решений информации, исключение зависимости от недостаточной квалификации и (или) недобросовестности исполнителя-человека, сокращение затрат за счет использования беспилотной техники, специализированного программного обеспечения, а также снижение рисков [4–6].
Наиболее распространенной цифровой технологией в современном строительстве можно считать построение информационной модели здания (от англ. Building Information Modeling, BIM) [7–8]. По своей сути она выступает цифровым двойником строительного объекта как предмета управления, который дает возможность осуществлять важнейшую управленческую функцию контроля выполнения работ. Идея BIM-модели заключается в том, что на стадии проектирования создается (в том числе) трехмерная цифровая модель объекта. Затем по ходу строительства с использованием беспилотного транспорта, технологий сканирования поверхности, датчиков, сенсоров, специализированного программного обеспечения с определенной периодичностью создаются новые 3D-модели, демонстрирующие прогресс в выполнении строительных работ [9–10]. Причем данные операции выполняются в автоматическом или полуавтоматическом режиме.
Таким образом, лица, принимающие решения, быстро получают необходимую информацию высокого качества для контроля и корректирующих действий, кроме того, автоматизация дает возможность снизить затраты на процессы мониторинга и контроля. Исключаются случайные ошибки, которые может допустить сотрудник-человек, а также становится практически невозможной целенаправленная фальсификация данных. К сказанному также можно добавить, что с 2021 г. в России становится обязательным создание цифровых моделей объектов, которые строятся за счет бюджетных средств.
Однако анализ литературы показывает, что разработка технологий создания BIM-моделей и их реализация на практике сталкивается с серьезными проблемами и ограничениями. Это вызвано недостаточной изученностью и разработанностью ряда теоретических и прикладных аспектов цифрового моделирования в строительстве.

Так, в современных условиях уже установлена целесообразность использования беспилотных воздушных судов (БВС) для проведения воздушной съемки строительных объектов и получения необходимой информации [11]. Например, в [12] решена задача контроля состояния наземных тепловых сетей на основе тепловизионной съемки с БВС, позволяющей выявить места утечек теплоносителя, которые требуют ремонта. Существуют разработки по проведению дистанционного бесконтактного строительного контроля с использованием аэрофотосъемки, которые демонстрируют достаточное качество получаемых данных [13–14]. Следует также отметить, что использование БВС исключает необходимость нахождения людей в потенциально опасных производственных зонах.
Как известно, на БВС могут быть размещены различные приборы и устройства, собирающие необходимую пользователю информацию: фотовидеокамеры, тепловизионные камеры, трехмерные лазерные сканеры (лидары) и др. [15–17]. Для управления строительством наибольшее значение имеет лазерное сканирование как наиболее подходящая технология получения данных для последующего построения трехмерных моделей. В ходе работы лидара на исследуемый объект направляется лазерный луч, а затем фиксируется время и направление его отражения. В результате формируется плотное облако точек, которое после обработки дает возможность получать трехмерные модели [18]. Плотные облака точек обеспечивают достаточно высокую точность результатов, т.к. скорость съемки достигает нескольких миллионов точек в минуту [19].
Построение информационных моделей зданий с использованием БВС и лазерного сканирования, а также иных технологий сбора данных уже обсуждалось в ряде работ. В частности, D. Moon и др. в своем исследовании демонстрируют, что облака точек, полученные с помощью лазерного сканирования, не обеспечивают необходимой точности информации для проектирования земляных работ при возведении крупных объектов. Для решения этой проблемы предложено комбинировать результаты лазерного сканирования с данными аэрофотосъемки [20]. Аналогичную методику исследования применили Y.H. Jo, S. Hong при построении цифрового двойника исторических объектов с целью планирования их реставрации и ремонта [21].
Однако такой подход увеличивает полезную нагрузку на БВС, сокращает время одного полета (вследствие роста массы полезной нагрузки), увеличивает общую продолжительность и стоимость работ. Частично решить эту проблему можно при использовании БВС с более высокой максимальной взлетной массой и продолжительностью полета, но такая
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ УЧЕНЫХ И СПЕЦИАЛИСТОВ техника сама по себе намного дороже и может быть малодоступной в условиях санкций, ограничений на импорт в Россию. Кроме того, при одновременном использовании информации в разных форматах растет потребность в вычислительных мощностях, увеличивается время обработки данных, появляется необходимость в дополнительном специализированном программном обеспечении. Поэтому совместное использование аэрофотосъемки и лазерного сканирования может быть перспективно по преимуществу для крупных уникальных объектов, а не для массовой практики строительного контроля и мониторинга.
Существуют также разработки по совместному применению лазерного сканирования как с поверхности Земли оператором-человеком, так и с БВС [22–24]. Это улучшает качество получаемой модели, но одновременно приводит к получению большого объема избыточной информации («шума»). Кроме того, требуются значительные расходы на работу операторов на поверхности, необходимо иметь ручные лазерные сканеры в достаточном количестве и т.д. Не случайно такой подход также чаще всего используется для построения моделей уникальных объектов исторического наследия и рекомендован ЮНЕСКО для трехмерной реконструкции историкокультурных памятников [25]. Согласно [26], использование двух методов получения данных для моделей зданий приводит к росту временных и финансовых затрат от 20-30% до 50% и более, что далеко не всегда компенсируется качеством данных [27].
Анализ литературы также показал, что в большинстве работ рассматривается научно-техническая задача получения модели уже построенного ранее здания по результатам однократного обследования. В дополнение к уже процитированным исследованиям можно отметить опыт по изучению деформаций и смещений здания Института передовых садоводческих исследований Трансильвании (г. Клуж-Напока, Румыния), который построен на слабых грунтах [28]. В этой работе были выявлены деформации и смещения фасада, которые в основном соответствуют допустимым отклонениям. В [29] выполнялась съемка здания Обсерватории имени Босхи (Индонезия), которое расположено на линии геологического разлома и требует ежегодного контроля.
В отличие от имеющихся исследований, в данной работе рассматривается использование лазерного сканирования с БВС для мониторинга и контроля строительных работ. Эта задача отличается тем, что сканирование должно проводиться не однократно или ежегодно (как в случае с уже построенными зданиями), а раз в сутки или еще чаще, причем на большом числе объектов. Следовательно, вопрос снижения затрат выходит на первый план и становится наиболее актуальным. Проведение комбини- рованного наземного и воздушного сканирования ежедневно в большинстве случаев невозможно в силу как финансовых, так и временных ограничений.
Поэтому необходимы дальнейшие исследования технологии воздушного лазерного сканирования как максимально дешевого и быстрого технического решения. Как полагают авторы, при использовании эффективных алгоритмов обработки данных оно может обеспечить необходимую точность измерений. Добавим, что в соответствии с данными систематического обзора [30], наиболее перспективными направлениями исследований в изучаемой предметной области как раз и являются контроль затрат на аппаратное и программное обеспечение, улучшение возможностей обработки данных, автоматизация данных процессов.
Как частично уже отмечалось ранее, в современных реалиях необходимо также учитывать усложнение доступа к наиболее современным техническим решениям, включая ограничение на экспорт промышленных БВС из Китайской Народной Республики, прекращение официального бизнеса «Leica Company» (ведущий производитель систем наземного лазерного сканирования) в России. Следовательно, возникает необходимость в максимально эффективном использовании уже имеющегося оборудования, а также в более широком применении техники, не попадающей под санкции, введенные в отношении России в 2022–2023 гг.
Однако в опубликованных российских исследованиях по вопросам лазерного сканирования в строительстве пока не нашли отражения возможности использования этой технологии при строительном контроле. Отдельные работы отечественных авторов (как и цитируемые выше зарубежные исследования) рассматривают построение моделей объектов культурного и исторического наследия по данным наземного и воздушного лазерного сканирования [31–32]. Популярным направлением исследований является использование лазерного сканирования (обычно мобильного, с размещением лидара на автомобиле) для контроля ровности дорог [33–35]. Этому благоприятствуют простые геометрические характеристики дорожного полотна (нарушение ровности сплошного плоскостного объекта сразу же идентифицируется даже при малой производительности лидаров). Данные разработки не ориентированы на контроль строительства объектов более сложной конфигурации (зданий, сооружений).
Таким образом, в процессах контроля и мониторинга строительных работ перспективно использование технологии воздушного лазерного сканирования с БВС, имеющей достаточную точность, приемлемую стоимость. Эта технология должна решать задачу корректного сравнения исходной проектной модели
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ УЧЕНЫХ И СПЕЦИАЛИСТОВ объекта строительства с фактическим состоянием. Кроме того, нужно отслеживать соответствие плановых и фактических моделей с графикам строительства и результатам сканирования на конкретную дату. Поэтому очень важны алгоритмы преобразований и сравнений соответствующих облаков точек. Учитывая все сказанное выше, цель данного исследования – разработка и апробация технологии автоматизации мониторинга и контроля строительных работ на основе данных лазерного сканирования с БВС.
МЕТОДЫ И МАТЕРИАЛЫ
В исследовании использован БВС «DJI Matrice 600 Pro» (производство – Китайская Народная Республика) типа «гексакоптер», со скоростью полета до 65 км/ч, максимальной взлетной массой 15,5 кг, максимальной высотой полета 2500 м, дальностью радиосвязи 5000 м, продолжительностью полета до 18 мин. БВС может использоваться при температурах от –10оС до +50оС и скорости ветра до 8 м/с. Также он укомплектован бортовым приемником спутниковой системы навигации.
Для сканирования на БВС размещался воздушный лазерный сканер «АГМ-МС3.200» (производство – Российская Федерация) весом 1,3 кг, с частотой сканирования 600 кГц (600 тыс. раз в секунду), максимальной дистанцией сканирования 150 м, обзором на 360о, точностью определения дальности 3 см, точностью определения координат 5 см. Прибор может использоваться при температуре от –20оС до +40оС. Общий вид задействованного в исследовании оборудования показан на рис. 1.
Проектная высота воздушного лазерного сканирования составляла 100 м. Полетное задание планировалось в программе «UgCS». Цифровой ортофотоплан разрабатывался с использованием программы «Agisoft Metashape Professional». Для обработки облаков точек применялась программа «Credo Скан 3D». При определении точной траектории движения БВС использовался онлайн-сервис «AGM Posworks web», для коррекции данных по движению БВС и устранения шума – программное обеспечение «AGM ScanWorks».
При разработке алгоритма сравнения плотных облаков точек использована методология недвоичных деревьев данных и метод построения деревьев октантов. Обработка плотных облаков точек, программная реализация алгоритма велась в приложении «Система управления мониторингом строительных работ на объектах, прошедших государственную экспертизу» (собственная разработка авторов, выполненная в Институте цифры Кемеровского государственного университета, Кемерово, Россия).
В качестве объекта работ была использована площадка нефтебазы по хранению и перевалке нефти и нефтепродуктов в г. Кемерово (Кемеровская область – Кузбасс, Россия).
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
На начальном этапе исследований был создан цифровой ортофотоплан местности, который необходим для последующего размещения на нем данных лазерного сканирования по объектам строительства. Для создания ортофотоплана использовались исходные (необработанные) цифровые материалы аэро-

Рис. 1. Общий вид оборудования, использованного в исследовании (слева – БВС, справа – воздушный лазерный сканер на подвесе)
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ УЧЕНЫХ И СПЕЦИАЛИСТОВ фотосъемки, элементы внутреннего ориентирования фотоснимков, элементы внешнего ориентирования фотоснимков (центры проекций аэрофотоснимков). Цифровой ортофотоплан получен из аэрофотоснимков с перекрытием границ для получения непрерывного изображения строительного объекта без швов и порезов.
Для построения цифрового ортофотоплана выполнялись следующие шаги:
-
1) ортотрансформирование аэрофотоснимков c использованием центров их проекций;
-
2) автоматическое отождествление снимков, построение разряженной точечной цифровой модели местности;
-
3) контроль положения и построения цифровой разряженной точечной модели поверхности по контрольным знакам;
-
4) построение плотной точечной цифровой модели поверхности;
-
5) построение ортофотоплана;
-
6) обрезка ортофотоплана и цифровой модели поверхности по границам объекта работ.
Далее проводилась работа непосредственно по созданию плотного облака точек на основе данных лазерного сканирования. При этом использовалась информация о траектории полета БВС, данные инерциальной системы БВС, результаты замеров с помощью лидара. Создание плотного облака точек включало следующие шаги:
-
1) получение точной траектории движения БВС относительно точки базовой станции (КЕМЕ);
-
2) автоматическое внесение корректирующих поправок инерциальной системы в данные замеров дальности;
-
3) автоматическая фильтрация предварительной версии плотного облака точек от шумов.
Таким образом, авторами были получены цифровой ортофотоплан местности, где выполняются строительные работы, и два плотных облака точек – по результатам аэрофотосъемки и по результатам лазерного сканирования. Прежде чем переходить к использованию полученных результатов для разработки технологии автоматизации мониторинга и контроля строительных работ, необходимо было оценить качество полученных данных, сопоставить их между собой (для оценки правильности расчетов, исключения грубых ошибок, подтверждения соответствия нормативным требованиям). С этой целью в программу «Credo Скан 3D» загружались плотные облака точек и строилась вертикальная секущая плоскость по характерным объектам на территории, где проводятся строительные работы. Результирующий профиль облаков точек по секущей плоскости показан на рис. 2.
Синяя линия соответствует облаку точек по результатам лазерного сканирования 23 августа 2022 г., красная линия соответствует облаку точек по результатам лазерного сканирования 17 декабря 2022 г. Зеленая линия соответствует плотному облаку точек, полученному в результате аэрофотосъемки.
Погрешность определения координат точек δ (согласно инструкции к используемому в исследовании лазерному сканеру) рассчитывается по следующей формуле:
δ = 15 + 1 × 10–3 × D , (1)
где D – расстояние до измеряемого объекта, км.
Результаты съемок должны соответствовать нормативным требованиям к результатам топографической аэрофотосъемки по погрешности расчета координат и плотности точек в расчете на 1 квадратный метр (согласно ГОСТ Р 59328-2021 «Аэрофотосъемка топографическая. Технические требования»). Поскольку дистанция до измеряемого объекта равна проектной высоте полета, то есть 100 м, погрешность расчета координат точек в пространстве в соответствии с (1) составит 15 + 1 × 10–3 × 0,1 = 0,015 м. Это соответствует нормативным требованиям к точности определения координат точек при воздушном лазерном
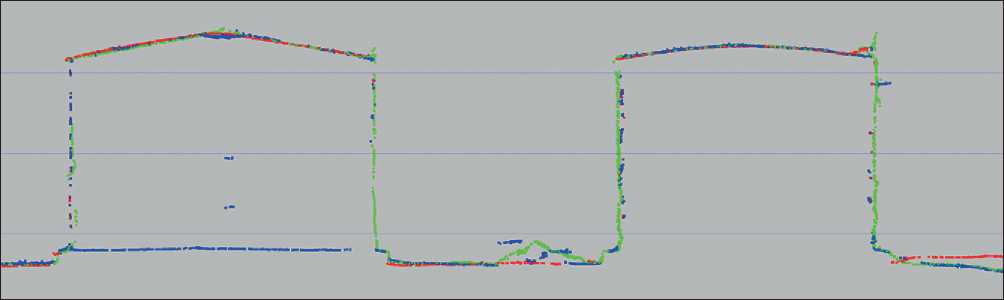
Рис. 2. Результирующий профиль облаков точек по секущей плоскости
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ УЧЕНЫХ И СПЕЦИАЛИСТОВ
Таблица 1
Характеристики плотных облаков точек по результатам лазерного сканирования
|
Дата сканирования |
Количество точек, шт. |
Площадь, м2 |
Плотность точек, единиц на м2 |
|
23.08.2022 г. |
28 447 422 |
118 229 |
240,6 |
|
17.12.2022 г. |
14 633 928 |
118 229 |
123,8 |
|
Начало алгоритма J |
|
V |
сканировании. В табл. 1 показаны характеристики плотных облаков точек по результатам лазерного сканирования. Как видно из данных табл. 1, плотность точек в расчете на один квадратный метр также соответствует действующим нормативным требованиям.
После получения и обработки первичных данных лазерного сканирования и аэрофотосъемки на начало строительства необходимо было разработать алгоритм для сопоставления начальных данных и результатов, которые отражают прогресс в проведении строительных работ на определенные даты. Такой алгоритм должен обрабатывать два облака точек, полученных на разные даты, и выделять фрагменты объекта строительства, которые были созданы за соответствующий период. В ходе исследования авторами разработан следующий линейный алгоритм (рис. 3). Для удобства восприятия и изложения слева пронумерованы блоки алгоритма.
Охарактеризуем основные блоки алгоритма. В ходе реализации первого блока загружается одно из плотных облаков точек, при этом очередность (в первую очередь вводятся результаты более ранней или более поздней съемки) не имеет значения, поскольку алгоритм предусматривает выбор нужной последовательности сравнения. Второй блок является блоком операций. Здесь система координат первого облака преобразуется в локальную систему координат. Для преобразования также используются данные аэрофотосъемки, поскольку каждая точка на снимке прикреплена к определенным географическим координатам, имеющим высокую точность.
Следует отметить, что чем точнее координаты (чем больше знаков после запятой имеют соответствующие записи), тем выше потребность в вычислительных мощностях, больше нагрузка на них, кроме того, удлиняется время вычислений. Для того чтобы сократить время обработки и нагрузку на вычислительные мощности, авторами предлагается переводить систему координат из исходной в локальную. Это осуществляется в четвертом арифметическом блоке алгоритма. В пятом блоке алгоритма облака точек совмещаются друг с другом в локальной системе координат.
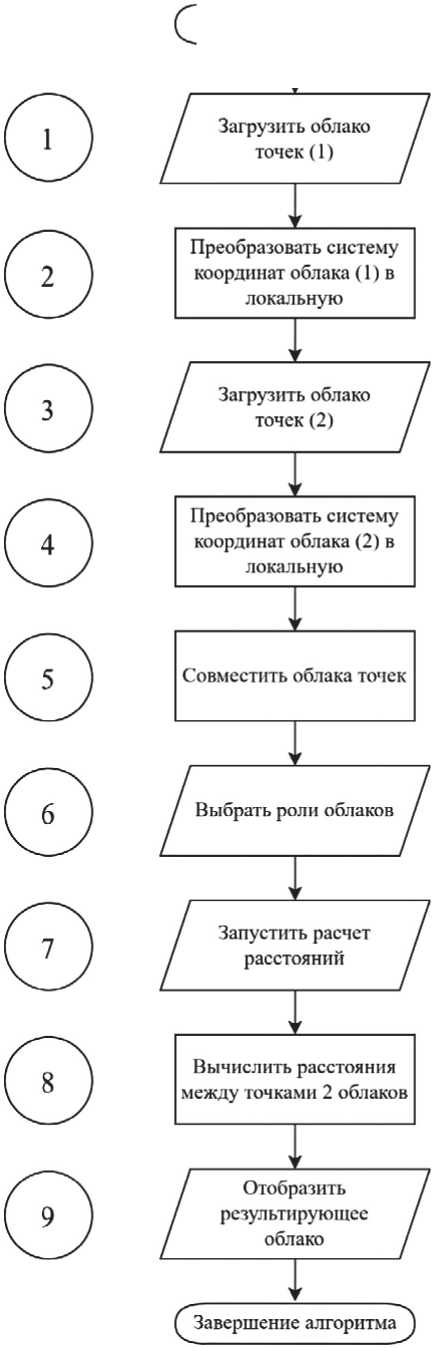
Рис. 3. Алгоритм сравнения плотных облаков точек на разные даты, используемый для мониторинга и контроля строительных работ
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ УЧЕНЫХ И СПЕЦИАЛИСТОВ
Далее в шестом блоке ввода-вывода данных выбираются роли облаков. Облако, полученное ранее, является исходным или опорным. Второе облако – это сравниваемое облако, которое является результатом более поздней съемки. На нем будут рассчитываться и визуализироваться расстояния между точками. Поскольку по мере выполнения строительных работ обычно появляются все новые и новые фрагменты объекта (например, этажи), то более позднее по времени съемки облако точек будет содержать больше информации, чем исходное. Соответственно, опорное облако определяется в соответствии с более ранней датой съемки. В результате выполнения шестого блока алгоритма рассчитанные расстояния (сгенерированные скалярные поля) размещаются на сравниваемом облаке.
Затем в процессе исполнения седьмого блока алгоритма проводится расчет расстояний между точками опорного и сравниваемого облака. Для расчета используется метод «ближнего соседа», когда для каждой точки сравниваемого облака находится ближайшая точка в исходном облаке, рассчитывается евклидово расстояние между ними. Затем это расстояние приписывается точке сравниваемого облака, в результате чего на базе данного облака формируется соответствующее скалярное поле.
Особенностью предлагаемого алгоритма является то, что поиск точек с целью рационального использования вычислительной мощности и сокращения времени работы ведется не по всему исходному облаку, а в границах заранее заданного пространства. Пространство совмещенных облаков представляется в виде октодерева, где каждый узел в дереве октантов делит пространство на восемь новых октантов (рис. 4).
Каждый из внутренних узлов октодерева содержит информацию о 8 «потомках», нижележащих узлах, причем каждый из них по размерам в 2 раза меньше «предка». Такая структура данных позволяет хранить трехмерные координаты при использовании 3 байт вместо 12 байт. Также существенно сокращается время поиска наименьшего поддерева, которое содержит нужную точку координат. Поиск ближайшей точки координат ведется не по всему исходному облаку, а только в границах октанта.
Девятый блок алгоритма отображает результирующее облако точек, то есть итог сопоставления опорного и сравниваемого облаков. Это облако должно визуализироваться с использованием цветовой схемы для отображения шкалы полученных расстояний. При использовании такого облака можно непосредственно идентифицировать фрагменты объекта, которые появились в течение определенного времени, а также провести точные измерения их положения в трехмерной системе координат.
Разработанный авторами алгоритм реализован в программе (веб-приложение) «Система управления мониторингом строительных работ на объектах, прошедших государственную экспертизу». Рассмотрим его использование для мониторинга строительных работ. Войдя в приложение, пользователь выбирает два облака точек для сравнения в соответствии с интересующими его датами. После выполнения сравнения программа отображает результирующее облако точек (рис. 5).
Как видно из данных рис. 5, программное обеспечение позволяет получить наглядное представление об изменениях трехмерного объекта за определенный срок, который устанавливается пользователем. Чем больше расстояние между точками в облаке, тем ближе цветовая шкала к красной части спектра. Минимальные расстояния соответствуют синей части спектра. Судя по рис. 5, в течение анализируемого периода существенно увеличилась высота объекта, находящегося в верхней левой части результирующего облака точек. Также достигнут значительный
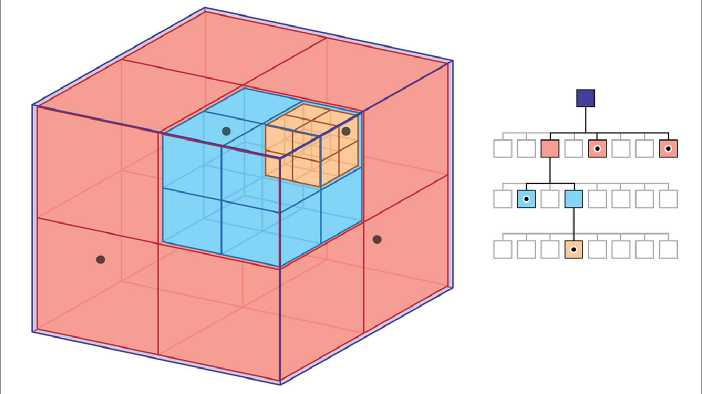
Рис. 4. Пример структурирования точек пространства с использованием октодеревьев [36]
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ УЧЕНЫХ И СПЕЦИАЛИСТОВ
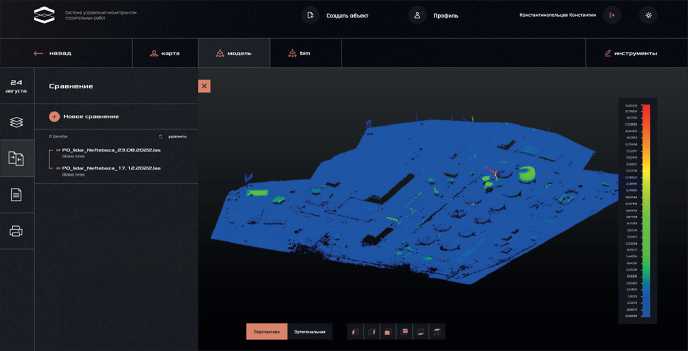
Рис. 5. Пример визуализации результирующего облака точек в программе «Система управления мониторингом строительных работ на объектах, прошедших государственную экспертизу»
прогресс в строительстве резервуара цилиндрической формы (правая верхняя часть результирующего облака точек). На остальной части строительной площадки существенных изменений не было (на изображении доминирует синий цвет).
В программе предусмотрен также ряд инструментов для точной оценки геометрических параметров объектов строительства и их изменений. В частности, предусмотрена функция «Построение профиля высот». Она позволяет оценить перепад высоты между выбранными точками (рис. 6).
Каждая точка имеет значения координат в трехмерной системе, что позволяет точно установить ее положение на реальном объекте. Профили (графики) перепада высот, как видно из рис. 6, можно выгрузить в форматах .csv (2D) и .las (3D).
Также по данным плотных облаков точек, используемым в программе «Система управления мониторингом строительных работ на объектах, прошедших государственную экспертизу», можно выполнить следующие операции, необходимые для пользователя (лица, принимающего решения):
-
1) измерение расстояния между точками с целью получить точные расстояния между объектами и рассчитать их геометрические размеры;
-
2) измерение координат точек для точного определения положения точки в трехмерном пространстве и обнаружения интересующего пользователя объекта на местности;
-
3) измерение площади и объема, что дает возможность рассчитать объем и массу материалов, использованных в течение определенного периода времени.
ЗАКЛЮЧЕНИЕ
Существующие публикации и технологии построения BIM-моделей зданий обладают определенными ограничениями и недостатками для постоянного использования в процессах контроля и мониторинга объектов строительства (достаточно высокая стоимость, длительность проведения съемки и обработки данных, необходимость применения дорогостоящей техники и оборудования). Ускорить и удешевить мониторинг объектов строительства можно на основе технологии лазерного сканирования исключительно с БВС (без наземной съемки) с последующей автоматизированной обработкой данных по соответствующим алгоритмам. В данном случае аэрофотосъемка и построение ортофотоплана проводится однократно в начале строительства, а затем с нужной периодичностью выполняется только воздушное лазерное сканирование.
Для обработки данных в исследовании разработан линейный алгоритм, позволяющий сопоставлять облака точек на разные даты и идентифицировать изменения координат точек. Отличительной особенностью алгоритма является то, что поиск точек при сравнении ведется не по всему облаку, а в гра-
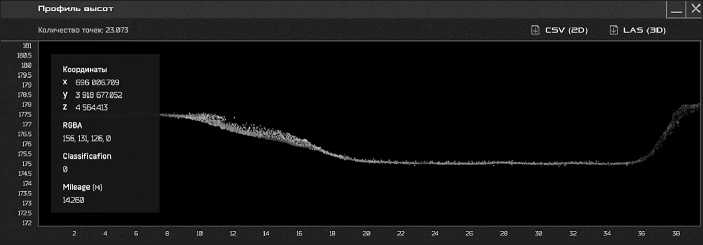
Рис. 6. Пример построения профиля высот между выбранными точками в программе «Система управления мониторингом строительных работ на объектах, прошедших государственную экспертизу»
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ УЧЕНЫХ И СПЕЦИАЛИСТОВ ницах области, заданной октантом. Это позволяет уменьшить нагрузку на вычислительные мощности и сократить время обработки данных. Результатом исполнения алгоритма является результирующее облако точек как результат сравнения двух облаков (с разными датами съемки).
Разработанный алгоритм получил программную реализацию в созданном авторами веб-приложении «Система управления мониторингом строительных работ на объектах, прошедших государственную экспертизу». При контроле и мониторинге строительных работ пользователь (лицо, принимающее решение) имеет возможность выбрать даты, в которые были получены облака точек, и провести их сравнение. Результирующее облако точек будет сформировано автоматически. Предусмотрена его визуализация с использованием цветовой схемы (красный цвет соответствует наибольшим изменениям, синий цвет соответствует минимальным изменениям). Также в веб-приложении предусмотрены функции построе-
ния профиля высот между выбранными точками, измерения координат точек и расстояний между ними, измерения площадей и объемов объектов строительства, расчета использованных материалов.
Таким образом, разработанная технология позволяет вести мониторинг и контроль строительных объектов с высокой скоростью, низкими затратами (так как не требует трудоемкого дорогостоящего лазерного сканирования с поверхности Земли), дает возможность максимально использовать существующую аппаратную и приборную базу без привлечения труднодоступного оборудования с высокой стоимостью. Разработанный алгоритм также способствует сокращению временных затрат и снижению нагрузки на вычислительные мощности. Программная реализация технологии контроля и мониторинга строительных работ дает возможность лицам, принимающим решения, быстро получать необходимую информацию, отслеживать изменения на объекте строительства, сопоставлять их с плановыми данными.
Список литературы Автоматизация мониторинга строительных работ на основе лазерного сканирования с беспилотных воздушных судов
- Schnell P., Haag P., Jünger H.C. Implementation of digital technologies in construction companies: establishing a holistic process which addresses current barriers. Businesses. 2023; 3(1): 1–18. https://doi.org/10.3390/businesses3010001
- Luo H., Lin L., Chen K., Antwi-Afari M. F., Chen L. Digital technology for quality management in construction: A review and future research directions. Developments in the Built Environment. 2022; 12: 100087. https://doi.org/10.1016/j.dibe.2022.100087
- Adekunle P., Aigabvboa C., Thwala W., Akinradewo O., Oke A. Challenges confronting construction information management. Frontiers in Built Environment. 2022; 8: 1075674. https://doi.org/10.3389/fbuil.2022.1075674
- Aliu J., Oke A.E. Construction in the digital age: exploring the benefits of digital technologies. Built Environment Project and Asset Management. 2023; 13(3): 412-429. https://doi.org/10.1108/BEPAM-11-2022-0186
- Ammar A., Nassereddine H., AbdulBaky N., AbouKansour A., Tannoury J., Urban H., Schranz C. Digital twins in the construction industry: a perspective of practitioners and building authority. Frontiers in Built Environment. 2022; 8: 834671. https://doi.org/10.3389/fbuil.2022.834671
- Papadonikolaki E., Krystallis I., Morgan B. Digital technologies in built environment projects: review and future directions. Project Management Journal. 2022; 53(5): 501–519. https://doi.org/10.1177/87569728211070225
- Fargnoli M., Lombardi M. Building Information Modelling (BIM) to enhance occupational safety in construction activities: research trends emerging from one decade of studies. Buildings. 2020; 10(6): 98. https://doi.org/10.3390/buildings10060098
- Ferdosi H., Abbasianjahromi H., Banihashemi S., Ravanshadnia M. BIM applications in sustainable construction: scientometric and stateof-the-art review. International Journal of Construction Management. 2023; 23(12): 1969–1981. https://doi.org/10.1080/15623599.2022.2029679
- Xu X., Mumford T., Zou P. Life-cycle building information modelling (BIM) engaged framework for improving building energy performance. Energy and Buildings. 2021; 231: 110496. https://doi.org/10.1016/j.enbuild.2020.110496
- Jiang Y. Intelligent building construction management based on BIM digital twin. Computational Intelligence and Neuroscience. 2021; 2021: 4979249. https://doi.org/10.1155/2021/4979249
- Su S., Zhong R.Y., Jiang Y. Digital twin and its applications in the construction industry: A state-of-art systematic review. Digital Twin. 2022; 2: 15. https://doi.org/10.12688/digitaltwin.17664.1
- Рада А.О., Кузнецов А.Д., Зверев Р.Е., Акулов А.О. Перспективы мониторинга состояния тепловых сетей путем тепловизионного обследования // Уголь. 2022. № S12. С. 149–154. http://doi.org/10.18796/0041-5790-2022-S12-149-154
- Бузало Н.А., Кундрюцков Д.Н., Пономарев Р.Р. Применение беспилотных летательных аппаратов при обследовании зданий и сооружений // Строительство и архитектура. 2022. Т. 10. № 1. С. 6–10. https://doi.org/10.29039/2308-0191-2021-10-1-6-10
- Siwiec J. Comparison of airborne laser scanning of low and high above ground level for selected infrastructure objects. Journal of Applied Engineering Sciences. 2018; 8(2): 89–96. https://doi.org/10.2478/jaes-2018-0023
- Szczepański M. Vision-based detection of low-emission sources in suburban areas using unmanned aerial vehicles. Sensors. 2023; 23(4): 2235. https://doi.org/10.3390/s23042235
- Pikalov S., Azaria E., Sonnenberg S., Ben-Moshe B., Azaria A. Vision-less sensing for autonomous micro-drones. Sensors. 2021; 21(16): 5293. https://doi.org/10.3390/s21165293
- Liang H., Lee S-C., Bae W., Kim J., Seo S. Towards UAVs in construction: advancements, challenges, and future directions for monitoring and inspection. Drones. 2023; 7(3): 202. https://doi.org/10.3390/drones7030202
- Rashdi R., Martínez-Sánchez J., Arias P., Qiu Z. Scanning technologies to building information modelling: a review. Infrastructures. 2022; 7(4): 49. https://doi.org/10.3390/infrastructures7040049
- Aryan A., Bosché F., Tang P. Planning for terrestrial laser scanning in construction: a review. Automation in Construction. 2021; 125: 103551. https://doi.org/10.1016/j.autcon.2021.103551
- Moon D., Chung S., Kwon S., Seo J., Shin J. Comparison and utilization of point cloud generated from photogrammetry and laser scanning: 3D world model for smart heavy equipment planning. Automation in Construction. 2019; 98: 322–331. https://doi.org/10.1016/j.autcon.2018.07.020
- Jo Y.H., Hong S. Three-dimensional digital documentation of cultural heritage site based on the convergence of terrestrial laser scanning and unmanned aerial vehicle photogrammetry. ISPRS International Journal of Geo-Information. 2019; 8(2): 53. https://doi.org/10.3390/ijgi8020053
- Adhikary R., Parikh K. Drone mapping versus terrestrial laser scanning for building mapping and assessment. Journal of Remote Sensing & GIS. 2021; 10: 283.
- Tysiac P., Sieńska A., Tarnowska M., Kedziorski P., Jagoda M. Combination of terrestrial laser scanning and UAV photogrammetry for 3D modelling and degradation assessment of heritage building based on a lighting analysis: case study – St. Adalbert Church in Gdansk, Poland. Heritage Science. 2023; 11: 53. https://doi.org/10.1186/s40494-023-00897-5
- Luhmann T., Chizhova M., Gorkovchuk D. Fusion of UAV and terrestrial photogrammetry with laser scanning for 3D reconstruction of historic churches in Georgia. Drones. 2020; 4(3): 53. https://doi.org/10.3390/drones4030053
- Sobura S., Bacharz K., Granek G. Analysis of two-option integration of unmanned aerial vehicle and terrestrial laser scanning data for historical architecture inventory. Geodesy and Cartography. 2023; 49(2): 76–87. https://doi.org/10.3846/gac.2023.16990
- Wang X. Application of 3D digital modeling technology in the construction of digital cities. Journal of Geographic Information System. 2023; 15(1): 98–109. https://doi.org/10.4236/jgis.2023.151006
- Bouziani M., Chaaba H., Ettarid M. Evaluation of 3D building model using terrestrial laser scanning and drone photogrammetry. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. 2021; XLVI-4/W4-2021; 2021: 39–42. https://doi.org/10.5194/isprs-archives-XLVI-4-W4-2021-39-2021
- Nap M-E., Chiorean S., Cira C-I., Manso-Callejo M-Á., Păunescu V., Șuba E-E., Sălăgean T. Non-destructive measurements for 3D modeling and monitoring of large buildings using terrestrial laser scanning and unmanned aerial systems. Sensors. 2023; 23(12): 5678. https://doi.org/10.3390/s23125678
- Kartini G.A.J., Saputri N.D. 3D Modeling of Bosscha Observatory with TLS and UAV integration data. Geoplanning: Journal of Geomatics and Planning. 2022; 9(1): 37–46. https://doi.org/10.14710/geoplanning.9.1.37-46
- Wu C., Yuan Y., Tang Y., Tian B. Application of terrestrial laser scanning (TLS) in the architecture, engineering and construction (AEC) industry. Sensors. 2022; 22(1): 265. https://doi.org/10.3390/s22010265
- Гутников В.А., Точилин О.Н. Лазерное сканирование объектов и территорий архитектурного и археологического наследия // Градостроительство. 2022. № 5–6. С. 39–44. EDN: EYUJET.
- Азаров Б.Ф., Карелина И.В. Наземное лазерное сканирование как инструмент для формирования информационных моделей зданий и сооружений // Геодезия и картография. 2019. № 6. С. 16–23. https://doi.org/10.22389/0016-7126-2019-948-6-16-23. EDN: DGOUPS.
- Середович В.А., Алтынцев М.А., Егоров А.К. Определение индекса ровности дорожного покрытия по данным мобильного лазерного сканирования // Вестник Сибирского государственного университета геосистем и технологий. 2017. Т. 22. № 3. С. 33–44. EDN: ZHICHF.
- Герасюк Е.А., Комиссаров А.В. Применение наземного лазерного сканирования для инженерно-геодезических изысканий при реконструкции автомобильных дорог // Интерэкспо Гео-Сибирь. 2017. Т. 9. № 1. С. 37–42. EDN: YUEHEF.
- Азаров Б.Ф., Алейникова Е.В. Оценка точности регистрации результатов сканирования на участке автомобильной дороги Р-257 «Енисей» (км 299+900 – км 304+900) // Ползуновский альманах. 2020. № 2–1. С. 4–9. EDN: SBJDCU.
- Wei W., Ghafarian M., Shirinzadeh B., Al-Jodah A., Nowell R. Posture and map restoration in SLAM using trajectory information. Processes. 2022; 10(8): 1433. https://doi.org/10.3390/pr10081433
