Автоматизация процесса укладки мешков с картофелем на поддоны

Автор: Белякова Е.С., Фирсов А.С., Соколов С.А., Михайличенко В.А.
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса
Статья в выпуске: 3 (40), 2023 года.
Бесплатный доступ
Автоматизация процесса упаковки и перемещения тары является одним из главных вопросов производства. Реализация автоматизированного процесса упаковки на предприятиях позволяет повысить количество реализуемой продукции с минимальными затратами и заключается в расширении функциональных возможностей малых ферм, возделывающих картофель, используя роботизированную линию упаковки и транспортировки урожая. (Цель исследования) Разработать конструкцию робота для укладки мешков с картофелем на поддоны. (Материалы и методы) В качестве примеров были рассмотрены существующие конструкции роботов укладчиков. Исследовали прочностные свойства конструкции робота на предполагаемую нагрузку, подобраны необходимые материалы и комплектующие для изготовления рамы робота. (Результаты и обсуждение) Произведены необходимые расчеты и смоделирована конструкция робота укладчика. (Выводы) Установлено, что за счет внедрения автоматизированного робота на линии упаковки картофеля годовая экономия денежных средств составит 80% от исходно рассматриваемой технологии.
Автоматизация, процесс упаковки, надежность, возделывание картофеля, пневмосистема, модернизация, контроль
Короткий адрес: https://sciup.org/147242265
IDR: 147242265 | УДК: 681.51:621.798.151:635.21:621.869.82
Automation of the process of laying bags of potatoes on pallets
Automation of the packaging process and the movement of containers is one of the main issues of production. The implementation of an automated packaging process at enterprises makes it possible to increase the number of products sold at minimal cost and consists in expanding the functionality of small farms cultivating potatoes using a robotic packaging and crop transportation line. (The purpose of the study) To develop a robot design for laying bags of potatoes on pallets. (Materials and methods) The existing designs of stacker robots have been considered as examples. The strength properties of the robot structure for the expected load have been investigated, the necessary materials and components for the manufacture of the robot frame have been selected. (Results and discussion) The necessary calculations have been made and the design of the stacker robot was modeled. (Conclusions) It is established that due to the introduction of an automated robot on the potato packaging line, the annual savings of money will amount to 80% of the initially considered technology.
Текст научной статьи Автоматизация процесса укладки мешков с картофелем на поддоны
Введение. В мировом сельском хозяйстве картофель занимает одно из первых мест наряду с рисом, пшеницей и кукурузой. Время хранения и спелости продукта до реализации на рынке зависит от производительности предприятия [9]. Реализация автоматизированной укладки мешков с картофелем на поддоны в предприятиях позволит увеличить производительность предприятий, а так же снизить затраты на фонд оплаты труда.
Материалы и методы исследования. При разработке и проектировании автоматизированного робота укладчика на первом этапе рассмотрены характеристики и параметры его работы [1]. Для привода автоматизированного рассчитываем его основные кинематические параметры.
Определяем требуемую мощность на выходном валу, Рвых , кВт: Р вых = Р дв ^ Л общ ,
Л , = Л ■ Л к ■ Л 2 • Л • Л 2, общ рем зуб пк м пк где Рдв - мощность двигателя; л; — КПД каждой кинематической пары, Для привода конвейера выбран двигатель на 0,12 кВт. Требуемая составляет 0,103 кВт
основные конвейера
мощность
Описание работы и устройства робота укладчика. Автоматический робот укладчик предназначен для укладки мешков картофеля на поддон (коробов). На рисунке 1 представлена схема технологического процесса фасовки картофеля.
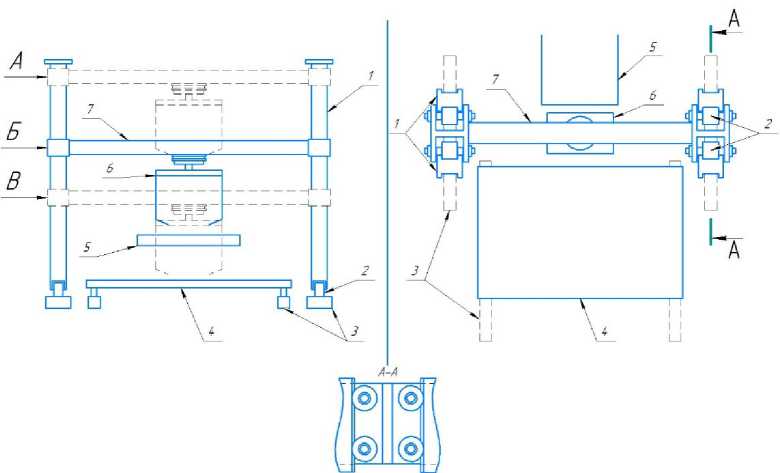
1 – стойка вертикального хода; 2 – направляющие ролики; 3 – рельс; 4 – платформа для поддона; 5 – подающий конвейер; 6 – захват тары;
7 – балка вертикального хода; А – начальное положение робота;
Б – положение захвата мешка; В – положение укладки мешка на поддон Рисунок 1 – Схема технологического процесса фасовки картофеля
Робот имеет 4 степени свободы: продольное перемещение по оси Х, поперечное перемещение по оси Y, вертикальное перемещение по оси Z, вращательное движение захвата. За счет мощной конструкции из балок, робот может перемещать тяжелую тару до 200 кг.
Процесс укладки происходит следующим образом: робот имеет программу с произведением циклов работы. Каждый цикл движения соответствует положению тары на поддоне [2,8]. Подающий конвейер перемещает тару к роботу. Робот, считав с помощью датчика наличие тары, начинает работу цикла укладки:
-
1 - робот подходит к таре с начальной точки с раздвинутыми захватами;
-
2 – пневматический механизм приподнимает тару и захваты сжимаются;
-
3 – робот перемещает тару на поддон в нужное положение;
-
4 – захваты разжимаются;
-
5 – робот приходит в начальное положение.
Если цикл отрабатывает без ошибки, и робот вернулся в начальное положение, то начинается повторение цикла, но с изменением положения тары на поддоне.
Рабочее давление пневмосистемы захвата, скорости вращения электродвигателей робота в процессе работы фиксированы. Изменение данных параметров возможно лишь при остановке цикла укладки, и после установки должна провестись проверка работоспособности.
Расчеты. Проведя анализ существующих конструкций и предварительных расчетов, разработана твердотельная модель балочного робота укладчика [3,4] (рисунок 2)
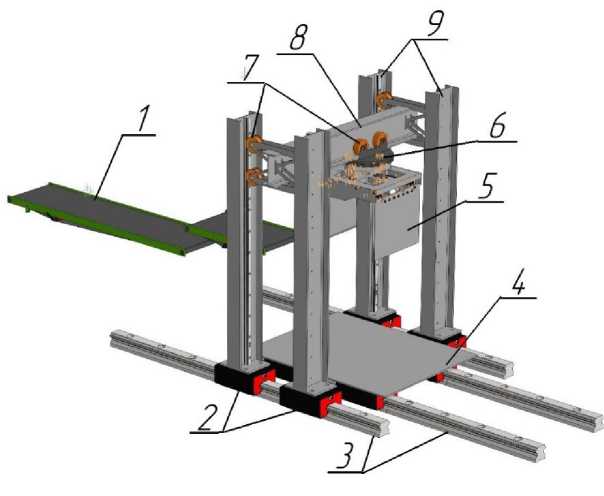
1 – подающий конвейер; 2 – направляющие каретки; 3 – рельсы; 4 – платформа для поддона; 5 – захват; 6 – редуктор захвата; 7 – направляющие ролики; 8 – подвижная балка; 9 – вертикальные стойки.
Рисунок 2 – Балочный робот укладчик
Каркас робота изготовлен из металлопроката «Двутавр», 4 вертикальные стойки и одна поперечная подвижная балка. Основная нагрузка в процессе работы приходится на поперечную балку робота.
На балке закреплен подвижный захват. За перемещение захвата по оси Y отвечают ролики, закрепленные на редукторе захвата. Основная нагрузка в процессе работы приходится на поперечную балку робота. Для обоснования прочности робота произведен расчет балки на изгиб [5,6,7], по исходным данным: двутавр сортамент 18Б2, длина балки L = 1248 мм, прилагаемая нагрузка на балку P = 722,26 Н. Полученные данные занесены в таблицу 2.
Таблица 2 – Характеристики поперечной балки сортамента 18Б2
|
Показатель |
Значение |
|
|
Допустимые |
Расчетные |
|
|
Нормальные напряжения ст, МПа |
197 |
16,20 |
|
Касательные напряжения т, МПа |
114,3 |
2,98 |
|
Коэффициент устойчивости стенки |
2,5 |
0,96 |
|
Коэффициент устойчивости полки |
16,17 |
5,36 |
|
Запас прочности по ст, % |
1116 |
|
|
Запас прочности по т, % |
3734,2 |
|
Данные таблицы характеризуют о прочности и безопасности конструкции робота, при работе с тарой, масса которой не превышает 30 кг.
Стойки перемещаются линейно по оси Х благодаря рельсам и кареткам.
Поперечная балка перемещается по оси Z вдоль вертикальных стоек благодаря системе из 4х рельс и 8 роликов.
Движение робота вдоль осей X, Z, Y осуществляется с помощью зубчато-ременного привода: подвижный механизм закреплен между концами ремня, ремень натягивается между натяжителем и шкивом ЭД. При вращении вала ЭД ремень начнет перемещать механизм. Схема привода для перемещения поперечной балки аналогична приводам для перемещения захвата по оси Y и стоек по оси X. Схема представлена на рисунке 3.
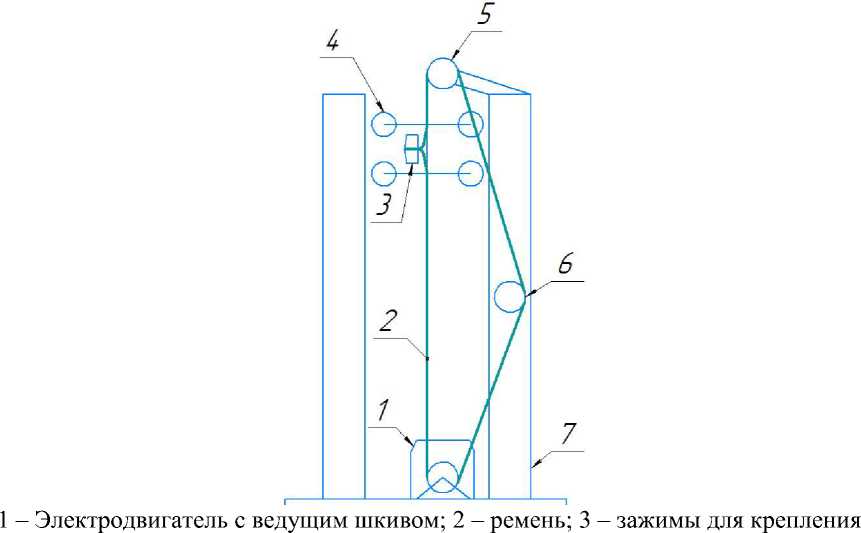
механизма на ремне; 4 – балка; 5 – ведомый шкив; 6 – натяжитель; 7 - стойки Рисунок 3 – Схема привода робота
Принцип работы захвата. Захват выполнен из нержавеющей стали AISI 304, устанавливается на поперечную балку робота с помощью поворотного редуктора. Захват имеет зажим для захвата мешка, которые приводятся в движение с помощью двух пневмоцилиндров (рисунок 4). Давление в пневмоцилиндре: 0.01…1 МПа.
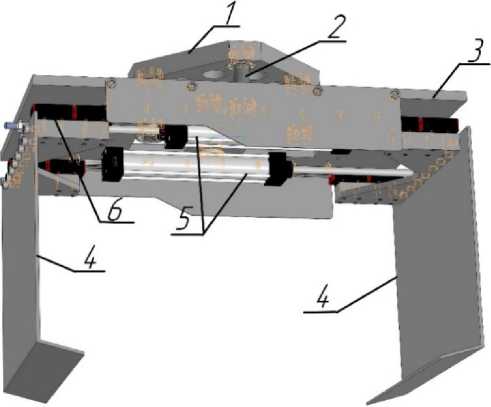
1 – платформа крепления захвата к редуктору; 2 – стойка крепления рамы к платформе; 3 – рама робота; 4 – зажим робота; 5 – пневмоцилиндры; 6 – каретка с рельсом.
Рисунок 4 – Модернизированный захват
Конструкция предполагает перемещение тары массой до 30 кг. Сама тара удерживается при перемещении на специальных пластинах, расположенных на зажимах захвата.
Для уменьшения износа пневмоцилиндров, в системе устанавливается блок подготовки воздуха (БПВ). Схема подключения пневматического оборудования представлена на рисунке 5.
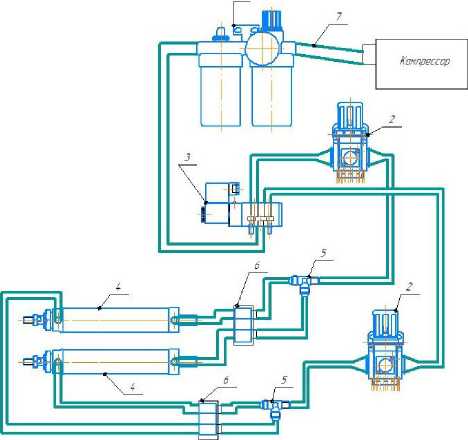
-
1 – блок подготовки воздуха; 2 – пнеморегулятор; 3 – распределитель воздуха;
4 – пневматический цилиндр; 5 – фитинг разветвитель; 6 – распределитель давления;
7 – пневмотрубка
Рисунок 5 – Схема подключения пневматики захвата
Поток сжатого воздуха поступает в пневмоцилиндры через распределитель воздуха. При заклинивании штока одного из пневмоцилиндров, при заданном общем давлении, распределитель давления, состоящий из втулки с отверстиями и пальца, частично перекрывает свободнодвижущемуся пневмоцилиндру поток сжатого воздуха из-за разности давлений, что позволяет перенаправить давление на заклинивший цилиндр и протолкнуть его шток.
Выводы: В результате исследования установлено, что предлагаемая конструкция позволяет увеличить производительность труда на производстве на 40%. Рассматриваемый технологический процесс является перспективным для внедрения на современных предприятиях по производству картофеля. Следующим этапом планируется разработка программного обеспечения робота и проведение лабораторных испытаний.
80 Агротехника и энергообеспечение. – 2023. – № 3 (40)
Тверь, ул. Маршала Василевского (Сахарово), 7
Список литературы Автоматизация процесса укладки мешков с картофелем на поддоны
- Фирсов А.С. Методические указания к выполнению курсового проекта по дисциплине "Детали машин и основы конструирования" на тему "Разработка привода конвейера". ФГБНУ "ФНДЛК", Тверь, 2019. - 34 с.
- Пашуков С.А. Чхетиани А.А. Современные технологии возделывания картофеля и их теоретический анализ // Novainfo: электронный журнал. - URL: https://novainfo.ru/article/3269 - Дата публикации: 21 апреля 2015 года.
- CNC TEHNOLOGY: официальный сайт. - Москва. - Обновляется в течение суток. - URL: https://cnc-tehnologi.ru/(дата обращения 25.09.2023).
- Полное руководство по роботизированным укладчикам поддонов // EVS Robotics: [сайт]. - 2018. - URL: https://www.evsint.com/ru/guide-for-robotic-palletizers/(дата обращения: 23.09.2023).
- Расчет балки на прочность // Cтроительный сайт ProstoBuild: [сайт]. - 2015. - URL: https://prostobuild.ru/onlainraschet/144-raschet-balki-na-prochnost.html (дата обращения: 22.09.2023).
- Двутавр 18Б2 нормальный (балочный) по ГОСТ 26020-83 // Инженерум: [сайт]. - 2017. - URL: https://engineerum.com/sortament/gost-26020-83/dvutavr_normalnyj-balochnyj/18b2/#:~:text=Двутавр%2018Б2%20нормальный%20(балочный)%20по,оси%20%22x%22%20i%20x%3D%2074%2C1см (дата обращения: 22.09.2023).
- Елисеев Ю.В. Сопротивление материалов: методические указания для проведения практических занятий / Ю.В. Елисеев, А.В. Кудрявцев - Тверь: ТГСХА, 2016.- 57 с.
- Правила транспортировки картофеля // Картофельный союз: [сайт]. - 2011. - URL: https://welikepotato.ru/pravila-transportirovki-kartofelya/(дата обращения: 21.09.2023).
- Нормы технологического проектирования предприятий по хранению и обработке картофеля и плодоовощной продукции // Библиотека нормативной документации: [сайт]. - 2023. - URL: https://files.stroyinf.ru/Data1/39/39091/#i1002499 (дата обращения: 21.09.2023).
