Автоматизация управления беспилотными транс-портными средствами в точном земледелии

Автор: Романов А.А., Филиппов А.А.
Журнал: Онтология проектирования @ontology-of-designing
Рубрика: Прикладные онтологии проектирования
Статья в выпуске: 2 (60) т.16, 2026 года.
Бесплатный доступ
Рассматривается задача автоматизации управления беспилотными транспортными средствами в точном земледелии. На основе онтологии предметной области предложен комплексный подход к формированию заданий, включающих траекторию движения и управляющие сигналы для средств обработки сельскохозяйственных полей. Разработан программный комплекс, включающий географическую информационную систему для создания электронных карт полей, алгоритм формирования заданий и модуль нечѐткого логического вывода на основе онтологий и продукционных правил. Особенностью подхода является формализация экспертных знаний агрономов, позволяющая учитывать почвенно-климатические особенности, характеристики культур и параметры технологических операций. Представлены структура онтологии для описания технологических операций обработки полей и механизм нечѐткого вывода для расчѐта норм внесения удобрений, позволяющий учитывать особенности конкретного участка поля, сельскохозяйственной культуры и выполняемой технологической операции. Создано расширение для конфигурации «1С:ERP Агропромышленный комплекс», объединяющее разработанный программный комплекс с учѐтной системой сельскохозяйственного предприятия. Описан пример применения системы для расчѐта нормы внесения удобрений под зерновые культуры, который показал, что суммарный расход удобрений на 7% ниже при использовании предложенного подхода по сравнению с традиционным методом.
Беспилотное транспортное средство, онтология, нечѐткий логический вывод, автоматизация управления, технологическая операция, точное земледелие
Короткий адрес: https://sciup.org/170213149
IDR: 170213149 | УДК: 004.89 | DOI: 10.18287/2223-9537-2026-16-2-255-268
Automation of unmanned vehicle control in precision agriculture
This paper examines the automation of unmanned vehicle control in precision agriculture. Based on a domain ontology, a comprehensive approach to generating tasks, including the trajectory and control signals for agricultural field treatment equipment, is proposed. A software system has been developed, comprising a geographic information system for creating electronic field maps, a task generation algorithm, and a fuzzy inference module based on ontologies and production rules. A distinctive feature of this approach is the formalization of agronomists' expert knowledge, making it possible to take into account soil and climate conditions, crop characteristics, and parameters of technological operations. An ontology structure for describing technological field treatment operations and a fuzzy inference mechanism for calculating fertilizer application rates are presented, enabling consideration of the characteristics of a specific field area, agricultural crop, and technological operation being performed. An extension for the configuration 1C:ERP Agro- Industrial Complex was developed to integrate the proposed software system with the accounting system of an agricultural enterprise. An example of applying the system to calculate fertilizer application rates for grain crops is described. The results demonstrated that the total fertilizer consumption was 7% lower when using the proposed approach compared to the traditional method.
Текст научной статьи Автоматизация управления беспилотными транс-портными средствами в точном земледелии
Сельское хозяйство находится на этапе автоматизация бизнес-процессов [1]. Это особенно актуально для растениеводства, где своевременность и точность выполнения технологических операций влияют на конечный результат. Применение беспилотных транспортных средств (БПТС) позволяет уменьшить воздействие вредных факторов на оператора и способствует переходу к точному земледелию с учётом неоднородности поля и оптимальному управлению ресурсами. В данной работе под оптимальным понимается такое управление БПТС, которое минимизирует затраты (расход материалов и длину маршрута). Критерием оптимальности является достижение целевой нормы внесения материалов (удобрения, пестициды и т.д.), определяемой с использованием базы знаний (БЗ) и механизма нечёткого логического вывода (НЛВ). Ограничениями являются геометрические параметры поля (границы, препятствия), технические характеристики БПТС (ширина обработки) и агротехноло-гические требования, формализованные в виде нечётких правил. Каждое поле характеризуется: рельефом, границами, почвенным составом, историей обработок и др.; различные сельскохозяйственные культуры требуют особых подходов; технологические операции имеют сложные взаимосвязи и ограничения, известные лишь специалистам. Создание интеллектуальных управляющих систем, формализующих опыт агрономов-технологов, позволит преобразовать качественные оценки специалистов в количественные задания для системы управления БПТС и осуществить более точное контекстно-ориентированное управление производственными процессами.
1 Постановка задачи
Внедрение технологий точного земледелия связано с использованием широкого спектра технических и программных решений. Известны комплексные проприетарные платформы от производителей техники (например, John Deere Operations Center1, CLAAS Telematics2), отдельные агронавигаторы 3 и системы параллельного вождения 4 . Данные системы обладают высокой точностью позиционирования, отработанными алгоритмами планирования пути, удобными картографическими интерфейсами и имеют определённые ограничения [2].
-
■ Эффективное функционирование таких систем часто возможно только при использовании специализированной техники конкретного производителя, оснащённой штатными системами управления и дорогостоящими датчиками. Это создаёт высокий порог входа и приводит к зависимости от поставщика.
-
■ Проприетарные программные платформы, как правило, представляют собой «чёрный ящик» с ограниченными возможностями адаптации и интеграции. Пользователь не может модифицировать логику принятия решений (например, алгоритмы расчёта норм внесения препаратов) под условия конкретного хозяйства, агрономические практики или локальные нормативы.
-
■ Большинство решений направлено на управление техникой в поле, но слабо связано с учётными системами сельхозпредприятия.
Известны работы, посвящённые вопросам использования методов искусственного интеллекта [3-6], онтологий [7, 8] и нечёткой логики [9] для решения различных сельскохозяйственных задач. Однако эти работы часто имеют фрагментарный характер и решают лишь частные задачи. Предлагаемый подход направлен на интеграцию с существующей инфраструктурой сельхозпредприятия. В [10] описана модель БЗ предметной области земледелия: параметры поля, особенности обрабатываемых культур, особенности процесса и средств обработки, параметры БПТС. В данной работе предложенная в [10] модель дополнена использованием НЛВ для расчёта норм внесения удобрений на основе экспертных продукционных правил, учитывающих особенности конкретного участка поля, сельскохозяйственной культуры и выполняемой технологической операции.
Целью настоящей работы является повышение эффективности и качества выполнения технологических операций БПТС за счёт разработки метода формирования комплексного задания на управление БПТС. Для достижения поставленной цели задание должно формироваться с учётом комплекса факторов: характеристик поля, агрономических требований культуры, параметров операции и технических возможностей оборудования [11]. В качестве критерия эффективности выполнения задания рассматривается минимизация отклонения расчётной нормы удобрений от экспертных агрономических рекомендаций при соблюдении аг-ротехнологических требований.
В работе решаются следующие задачи:
-
■ разработка географической информационной системы для формирования электронных карт полей с возможностью создания тематических слоёв, отражающих особенности производственного процесса: характеристики почв, заболевания растений, историю обработок и текущее состояние посевов;
-
■ создание модуля НЛВ на основе БЗ, обеспечивающего формализацию и использование экспертных знаний агрономов при принятии решений и управлении БПТС;
-
■ разработка алгоритма формирования заданий для БПТС, учитывающего особенности поля, требования сельскохозяйственных культур, параметры технологических операций и технические характеристики средств обработки.
Использование онтологического подхода для формализации экспертных знаний в задачах управления технологическими операциями в сельском хозяйстве является активно развивающимся научным направлением [12, 13]. Интеграция онтологий с интернетом вещей [1416] и системами поддержки принятия решений [17] позволяет создавать гибкие системы управления.
2 Алгоритм формирования заданий
Формально задачу формирования заданий для системы управления БПТС можно представить в виде функции: F: F j х S х V j х А ^ Т ^ , аргументами которой являются сведения об i -м поле , технологической операции ̂ , j -м БПТС и формализованные знания агрономов в виде БЗ А с функцией НЛВ: F = (S[, В f, О f, Af , D f>,
где S i = {(^ ik> hk> {(У ik l> ^ ikl>
К
– спецификация технологических операций, кото- к=1
рые необходимо выполнить на i -м поле в текущем сезоне с учётом находящейся на поле
А
сельскохозяйственной культуры . Каждая технологическая операция определяет ис-
Л
пользование множества БПТС ∈ , средств обработки ∈ и материалов ∈ с учётом их взаимной совместимости;
– множество координат границы i -го поля;
of = {(т&в а>} ^= 1 - множество препятствий на i- -м поле, каждое k-е препятствие О[к определяется типом Т^ и множеством координат В^. ;
Af = { ( В -1 , {{keyh , value fk}]L >} – множество отдельных участков i -го поля, k -й уча-
'/£ = 1
сток поля имеет границы в виде множества координат , а также данные агрохимического обследования почвы к -го участка {(k е y -k ,, va I и е -k i)}k_1 (ключ-значение);
D i = {( Вik, N tk >}k=1 - множество заражённых участков i -го поля, к -й участок заражения определяется множеством координат границы участка и названием заболевания .
Выбранная для выполнения технологическая операция определяется аргументом ̂ ∈ .
Аргумент позволяет описать характеристики j -го БПТС, который выбран для выполнения технологической операции ̂ [10].
БЗ содержит формализованные знания агронома в виде нечётких продукционных правил на языке SWRL , которые используются для организации НЛВ при формировании задания .
Результатом вычисления функции является задание для i -го поля и j -го БПТС технологической операции S следующего вида: Ti j=(Рj, Gк, R { >,
где – множество точек маршрута j-го БПТС по i-му полю , каждая точка представляет собой пару географических координат;
L К
Gtj = {< В § к, {<к еу § к lt v a lu е § к i )} )} _ – множество ячеек, на которые делится поле. Ячей-
*k=i ка имеет координаты границы с учётом габаритов j-го БПТС и установленного на
БПТС средства обработки, а также содержит множество управляющих сигналов {<к еу § к I, v а 1и е § к l )}^_1 для установленного средства обработки;
– множество отношений между текущей точкой маршрута и соответствующей ей ячейкой.
Алгоритм формирования заданий можно представить в виде следующих шагов.
выбор поля и необходимой для выполнения технологической операции ̂ .
вывод доступных для использования комбинаций БПТС, средств обработки и материалов
{
выбор необходимой комбинации <^т, Ttт, Mim).
для выбранного БПТС Vj = <^т, Tim) формируется маршрут передвижения по i -му полю в виде множества точек [18].
на основе характеристик выбранного БПТС формируется множество ячеек поля с ука-
занием их границ
〉 } . Ячейка ∈ представляет собой квадрат, сто-
рона которого равна ширине средства обработки БПТС .
формируется множество отношений между каждой точкой маршрута и соответствующей ей ячейкой.
для k-й ячейки ∈ на основе процесса НЛВ БЗ выполняется формирование множества управляющих сигналов А: (А[ П В gk) х (D tГ П В § к) х I х Mim ^
{<& е У §кi, valuе § кг >} ^ =i, G J к = < В§jk,{{кеу § кb vа 1ие§* г >} ^=1 >. Входными данными процесса НЛВ являются данные агрохимического обследования ̂ ∩ и сведения о заражённых участках ∩ в текущей ячейке с учётом соответствия координат, а также дополнительные сведения ̂ (тип сельскохозяйственной культуры и сезон проведения технологической операции) и выбранный материал ̂ (удобрения, химикаты и т.д.).
В результате формируется задание для системы управления БПТС, в т.ч. координаты маршрута передвижения по полю и множество управляющих сигналов для средства обработки с привязкой к отдельным участкам поля с учётом характеристики почвы и заболеваний сельскохозяйственной культуры.
3 База знаний и организация нечёткого логического вывода
БЗ системы управления БПТС можно представить в виде:
A = { 0 WL ,S WRL ,P e 11et, SWRLF), где 0 W- - онтология на языке OWL 2 5 для описания структуры БЗ; – множество продукционных правил на языке SWRL 6 ;
– машина логического вывода Pellet 7;
– разработанный компонент для осуществления процесса НЛВ на основе БЗ [19].
-
3.1 Структура онтологии
Схема онтологии представлена на рисунке 18. Структура компонента БЗ для формирования задания по внесению удобрений представлена с использованием диалекта де- скрипционной логики SW ОЗ Q T(D )9 [20].
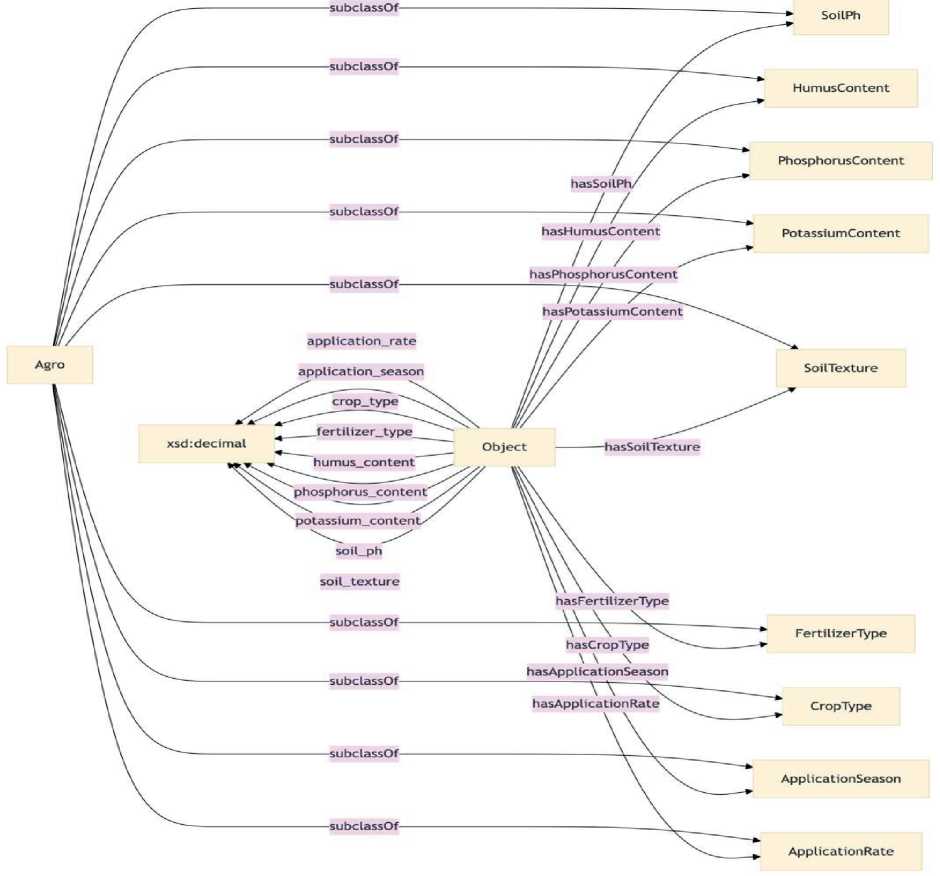
Рисунок 1 – Схема онтологии
Структура компонента содержит описание следующих классов:
-
■ класс Ад го = Т описывает набор характеристик почвы к еу ^ , типов управляющих сигналов для средства обработки БПТС , а также дополнительные сведения ̂ : тип
сельскохозяйственной культуры и сезон проведения технологической операции;
-
■ класс Objесt = Т описывает ячейку Gцк некоторого поля Fi в рамках задания Ту для системы управления БПТС.
Классы А го о и О be е с t объявлены непересекающимися А дг о п О be е с t Е 1.
-
8 Для повышения компактности и читаемости по сравнению со средствами визуализации редактора Protégé ( OntoGraf ) схема выполнена с помощью сервиса Mermaid ( https://mermaid.live ).
-
9 https://en.wikipedia.org/wiki/Description_logic#Naming_convention .
Класс Оbjе ct содержит следующие функциональные свойства данных для определения чётких значений результатов агрохимического обследования почвы [21]:
■ soiIPh - показатель кислотности (pH) почвы в единицах по шкале от 1 до 14;
-
■ humusOontent - показатель содержания гумуса в почве;
-
■ рhosphorusОоneent - содержание фосфора в почве;
-
■ роtassiumOontent - содержание калия в почве;
О bj ее t с = 1 ooiIPh.Decimal n = 1 humusCon tent. Dccimal n n = 1 ph о pph о rus С о nCent . Decima I n = 1 p о tass ium oontent . D ecima I.
Класс App Iicati о пС e so on = Agro n {Autumn, Spring, Vegetation} используется для описания сезона проведения технологической операции: осень, весна, вегетация.
Описания результатов агрохимического обследования почвы кеу^ в виде качественных (нечётких) значений имеют вид [21]:
■ С о iIPh = Ag г о n {A cidi с, A l к a Iine, Шeutral} описывает уровень кислотности (pH) почвы: кислотная, ще лочная, нейтральная;
■ Humuo С оп ee п t = A дг on {HL о w, НМе d ium, НН i д h} описывает процент содержания гумуса в почве:
низкий, средний, высокий;
■ Р h о pph о ruo С оп t пп t = A д oon {PhD е fi с i еп t , Р hCuf ficient , PhHig h} описывает уровень содержания фосфора в почве: недостаточный, достаточный, высокий;
■ Pоtassiumonntent = Agoo n {P оDe f icinnt , PoSf f f icinnt , PоHigh} описывает уровень содержания калия в почве: недостаточный, достаточный, высокий;
■ S о iITexture = Ag г о n {L ight, Medium, He аyy) описывает механический состав почвы как соотношение глины, ила и песка: легкий (песчаная, супесчаная), средний (суглинок) и тяжелый (глинистая);
■ FrrtlIizerType = Atoon {Nitrognn, Phosphorus, oo tass ium) описывает тип удобрения: азотные, фос форные и калийные;
■ тип сельскохозяйственной культуры: чувствительная к хлору (картофель, ягоды, лук), зерновая (пшеница, ячмень), бобовая (горох, соя), овощная; представлен перечисляемым классом CropType = Agro n {ChlorineSensitive, Grain, Legume, Vegetable};
Для описания нормы внесений удобрений (от 0-300 кг/га, универсальный диапазон может покрыть большинство типов удобрений) в качестве примера типа управляющего сигнала кеyG для средства обработки БПТС Vj используется свойство данных pppIicationRate :
О bject с = 1 ppp11ca ti о rP ate. Decim a I.
Для описания данного показателя в виде качественных значений используется следующий перечисляемый класс:
App Iica ti о nR ate = A go о n {RNnne ,R R euuce d ,R Me dium, RRncre aee d ,R Hig h,R Vr г у High}.
Для организации отношений между классом О je'е ot и объявленными перечисляемыми классами созданы следующие функциональные объектные свойства:
О bj е с t с = 1 hsoS о i IPh.S о i IPh n = 1 h esHume s С о nen nt. fumes С о neent n n = 1 hosPhosphruus С о nennt . Phsshh о uss С о nennt n n = 1 hosP о toss ium С о neent. P о toosiumCnntent n n = 1 hosOollTexture. OoiITexture n = 1hosFortiitzerType. FertlIizeTypee n = 1 hos To о p Ppe e-To о p Pye e n = 1 hasApp I i cati none so о n.ppp I i ca ti none so о n n = 1 h eshp p Iica ti о rP ate. ppp IicatiorP ate .
На основе описанной структуры онтологии формируется множество продукционных правил на языке SWRL для организации НЛВ.
-
3.2 Продукционные правила
Компонент S WRL БЗ A системы управления БПТС позволяет описывать экспертные знания на основе качественных (нечётких) значений для сокращения времени наполнения БЗ. Например, правила определения нормы внесения азотных удобрений имеют вид [21]:
hasApplicationSeason(?o, Autumn) ^ hasSoilTexture(?o, Light)
^ hasFertilizerType(?o, Nitrogen) -> hasApplicationRate(?o, RNone)
hasHumusContent(?o, HHigh) ^ hasFertilizerType(?o, Nitrogen) ->
-
-> hasApplicationRate(?o, RReduced)
hasCropType(?o, Legume) ^ hasFertilizerType(?o, Nitrogen) ->
-
-> hasApplicationRate(?o, RReduced)
-
3.3 Нечёткий логический вывод
hasCropType(?o, Grain) ^ hasHumusContent(?o, HLow) ^ hasApplicationSeason(?o, Spring) ^
^ hasFertilizerType(?o, Nitrogen) -> hasApplicationRate(?o, RHigh)
hasCropType(?o, Vegetable) ^ hasApplicationSeason(?o, Vegetation) ^
^ hasFertilizerType(?o, Nitrogen) -> hasApplicationRate(?o, RMedium).
Для обеспечения корректности и непротиворечивости продукционных правил проведена их валидация. На первом этапе полученный набор SWRL -правил проверялся с помощью встроенных средств редактора Protege . На втором этапе агроном проверил правильность задания норм внесения удобрений для различных комбинаций кислотности и плодородия почв.
Агроном или инженер по знаниям может добавлять новые классы и корректировать коэффициенты НЛВ без изменения программного кода алгоритма НЛВ. В качестве направления развития системы рассматривается применение методов машинного обучения (например, на основе анализа дерева решений) [22]. Это позволит автоматически корректировать БЗ на основе накопленных исторических данных.
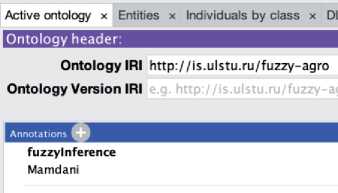
Для определения параметров и настроек алгоритма НЛВ с помощью SW RLF используются OWL -аннотации [19]:
-
■ fuzzyInference - определение алгоритма НЛВ, применяется к онтологии (рисунок 2а).
-
■ fuzzylnferenceConjunction , fuzzyInferenceDisjunction , fuzzyInferenceImplication - ручное определение параметров алгоритма НЛВ: реализация оператора И, реализация оператора ИЛИ, функция активизации; применяются к онтологии и переопределяют настройки для выбранного алгоритма (рисунок 2а).
-
■ fuzzyInputVariable - определение входных переменных; применяется к свойствам онтологии (рисунок 2б).
-
■ fuzzyOutputVariable - определение параметра для вычисления в процессе НЛВ; применяется к свойствам онтологии (рисунок 2в).
-
■ fuzzyOutputVariableDefuzzifier - ручное определение функции дефаззификации; применяется к свойствам онтологии с аннотацией fuzzyOutputVariable и переопределяет настройки для выбранного алгоритма (рисунок 2в).
-
■ fuzzyVariableMinimum , fuzzyVariableMaximum - определение интервала допустимых значений переменной; применяются к свойствам онтологии с аннотациями fuzzyInputVariable или fuzzyOutputVariable (рисунок 2в).
-
■ fuzzyTerm - определение терм лингвистической переменной; применяется к индивидуальности онтологии. Данная аннотация также позволяет выбрать вид функции принадлежности для фаззификации значения входной переменной (рисунок 2г).
В качестве входных переменных для алгоритма НЛВ с помощью аннотации fuzzyInputVariable обозначены следующие свойства класса Object: soilPh, humusContent , phosphorusContent , potassiumContent , hasSoilTexture, hasFertilizerType, hasCropType, hasApplicationSeason .
Выходной переменной с помощью аннотации fuzzyOutputVariable обозначено свойство applicationRate .
Для каждого лингвистического терма с помощью аннотации fuzzyTerm указана связь с соответствующей входной или выходной переменной, а также настройки функции принадлежности для выполнения процесса фаззификации или дефаззификации.
Таблица 1 содержит описание настроек для всех лингвистических термов. Используются кусочно-линейные (треугольные и трапециевидные) функции принадлежности для лингвистических термов. Параметры функций (координаты вершин треугольников и трапеций) определены на основе анализа отраслевых агрохимических справочников и уточнены в ходе экспертных консультаций с агрономами.
а)
= Bapplicationjate — Annotations Usage
Annotations: application_rate
fuzzyOutputVariable fuzzyVariableMaximum [type: xsd:decimal] 300
fuzzyVariableMinimum [type: xsdzdecimal] 0
в)
= ш humus_content - Annotations Usage
Annotations: humus_content
Annotations ^
fuzzylnputVariable
б)
= ф SoilPhAcidic — Annotations Usage
Annotations: SoilPhAcidic
Annotations ^
fuzzyTerm soil_ph,Trapezoid,3-5,3.5,4-0,5.5
г)
Рисунок 2 – Пример использования аннотаций для настройки параметров нечёткого логического вывода:
-
а) добавление аннотации для онтологии;
-
б) добавление аннотации для свойства данных в качестве входной переменной;
-
в) добавление аннотации для свойства данных в качестве выходной переменной;
-
г) добавление аннотации для индивидуальности в качестве лингвистической переменной
Значения объектных свойств индивидуальности перечисляемых классов обозначаются лингвистическими термами с помощью аннотации fuzzyTerm . Значение функции принадлежности определяется автоматически: у выбранного терма степень принадлежности равна 1, у остальных – ноль.
4 Пример
Система управления БПТС представляет собой комплексное программное обеспечение, которое состоит из следующих компонентов:
-
■ Учётная система «1С:Предприятие
-
8. ERP Агропромышленный ком-плекс» 10 позволяет получить сведения о полях, технологических операциях, доступных транспорт-
Таблица 1 – Настройки лингвистических термов
Переменная
Лингвистический терм
Функция принадлежности
soilPh
Acidic
Trapezoid(3.5, 3.5, 4.0, 5.5)
Neutral
Triangle (5.2, 6.0, 7.2)
Alkaline
Trapezoid(6.8, 7.8, 9.0, 9.0)
humusContent
HLow
Trapezoid(0, 0, 1.5, 2.5)
HMedium
Triangle(1.5, 2.5, 4.5)
HHigh
Trapezoid(3.5, 4.5, 6.0, 6.0)
phosphorusContent
PhDeficient
Trapezoid(0, 0, 30, 80)
PhSufficient
Triangle(50, 100, 180)
PhHigh
Trapezoid(150, 200, 250, 250)
potassiumCon-tent
PoDeficient
Trapezoid(0, 0, 60, 120)
PoSufficient
Triangle(80, 140, 220)
PoHigh
Trapezoid(180, 240, 300, 300)
applicationRate
RNone
Trapezoid(0, 0, 10, 30)
RReduced
Triangle(20, 60, 100)
RMedium
Triangle(80, 120, 160)
RIncreased
Triangle(140, 180, 220)
RHigh
Triangle(200, 240, 280)
RVeryHigh
Trapezoid(260, 280, 300, 300)
10
ных средствах и средствах обработки.
-
■ Географическая информационная система (ГИС) «Разметка сельскохозяйственных полей» позволяет формировать электронные карты полей с учётом различных свойств слоёв: препятствия, болезни, данные агрохимического обследования.
-
■ Модуль формирования заданий для БПТС [18].
-
■ БЗ позволяет накапливать экспертные знания для решения задачи автономного управления БПТС [10].
Для интеграции разработанных программных решений с учётной системой сельхозпредприятия реализовано расширение для конфигурации «1С:Предприятие 8. ERP Агропромышленный комплекс», обеспечивающее обмен данными через REST API 11 по протоколу HTTP . Использование штатного механизма расширений платформы 1С: Предприятие 8 12 гарантирует бесшовное включение компонента обмена в любую информационную базу на основе указанной конфигурации без изменения её кода. Разработанное расширение взаимодействует с объектами метаданных подсистемы «Растениеводство» 13 для извлечения сведений о характеристиках полей, возделываемых сельхозкультурах, планируемых технологических операциях, доступных транспортных средствах, средствах обработки и расходных материалах.
Пример формирования области для ввода данных агрохимического обследования представлен на рисунке 3, в котором некоторая ячейка поля определена в качестве индивидуальности object класса Object со следующими значения показателей результатов агрохимического обследования:
object: Object
(object, 5.0): soilPh (object, 1.8): humusContent (object, 45): phosphorusContent
(object, 110): potassiumContent (object, Heavy): hasSoilTexture.
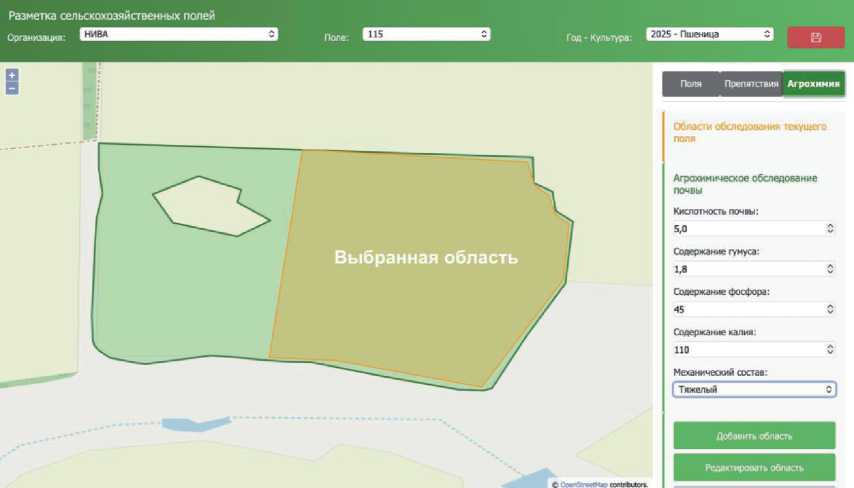
Рисунок 3 – Пример ввода данных агрохимического обследования для выбранной области поля
Тип сельскохозяйственной культуры (пшеница), сезон проведения технологической операции (весна) и тип удобрения (азотные) задаются на основе данных из учётной системы: (object, Grain): hasCropType, (object, Nitrogen): hasFertilizerType,
-
11 https://restapitutorial.ru .
-
12 https://v8.1c.ru/platforma/rasshireniya/ .
-
13 https://solutions.1c.ru/catalog/erpapk/rastenievodstvo .
-
■ традиционный метод: средняя норма внесения
-
■ предлагаемый метод: расчёт индивидуальной
239.9 кг/га.
Для оценки эффективности предложенного
Таблица 2 – Результаты фаззификации
подхода проведено сравнительное моделирование процесса внесения минеральных удобрений (аммиачной селитры) для участка поля площадью 40 га. Сравнение проводилось между традиционным методом (внесение по средней норме на поле) и предлагаемым методом внесения на основе механизма НЛВ с учётом разбиения поля на ячейки.
Параметры эксперимента:
– 150 кг/га (усреднённый показатель по результатам агрохимического обследования всего поля); итоговый расход: 6000 кг.
нормы для каждой ячейки (60х60 м) на основе БЗ (pH, содержание фосфора и калия).
В результате применения алгоритма НЛВ для 25% ячеек (участки с высоким содержанием питательных веществ) норма была снижена до 110–120 кг/га, а для 10% (дефицитные участки) – повышена до 170 кг/га.
Суммарный расход удобрений составил
5580 кг, что на 7% ниже традиционного метода при сохранении целевого агрономического эффекта. Среднеквадратичное отклонение расчётной
Переменная
Лингвистический терм
Степень принадлежности
soilPh
Acidic
0.333
Neutral
0.0
Alkaline
0.0
humusContent
HLow
0.7
HMedium
0.3
HHigh
0.0
phosphorusContent
PhDeficient
0.7
PhSufficient
0.0
PhHigh
0.0
potassi-umContent
PoDeficient
0.167
PoSufficient
0.5
PoHigh
0.0
hasSoilTex-ture
Light
0.0
Medium
0.0
Heavy
1.0
hasFerti-lizerType
Nitrogen
1.0
Phosphorus
0.0
Potassium
0.0
hasCropType
ChlorineSensitive
0.0
Grain
1.0
Legume
0.0
Vegetable
0.0
hasApplicati onSeason
Autumn
0.0
Spring
1.0
Vegetation
0.0
нормы от экспертных рекомендаций агронома со-
(object, Spring): hasApplicationSeason.
В результате выполнения этапа фаззификации для обозначенных входных переменных получены результаты, которые представлены в таблице 2.
По результатам выполнения этапов агрегации и активации рассчитаны степени уверенности для антецедентов и консеквентов продукционных SWRL -правил, выполнено следующее правило со степенью уверенности консеквента 0.7:
hasCropType(?o, Grain) ^ hasHumusContent(?o, HLow) ^ hasApplicationSeason(?o, Spring) ^ ^ hasFertilizerType(?o, Nitrogen) -> hasApplicationRate(?o, RHigh)
В результате выполнения аккумуляции и деффаззификации в онтологию добавлена аксиома ( object , 239.9): application_rate . Таким образом, норма внесения удобрений составила
ставило не более 2,4%.
Важным условием практического применения предложенного подхода является его невысокая вычислительная сложность, особенно при обработке массивов данных для полей большой площади (тысячи гектаров). В ходе экспериментальной оценки прототипа программного модуля, реализованного на языке Java , установлено, что:
-
■ около 1 секунды требуется на запуск виртуальной машины и загрузку OWL -онтологии;
-
■ среднее время выполнения логического вывода для одной ячейки поля в рамках одной
сессии составляет не более 15–20 мс на процессоре с тактовой частотой 2.5 ГГц.
Время формирования полной карты-задания для типичного поля площадью 100 га, состоящего из 278 ячеек, составляет около 5 секунд.
Заключение
В статье представлен комплексный подход к автоматизации управления БПТС в точном земледелии, основанный на применении онтологии, БЗ и НЛВ.
Основные результаты работы включают:
-
1) формальную постановку задачи формирования заданий для БПТС, учитывающую пространственные данные, агрономические требования и технические ограничения;
-
2) ГИС с поддержкой многослойного представления электронной карты поля;
-
3) структуру БЗ на основе OWL -онтологии, SWRL -правил и механизма НЛВ;
-
4) алгоритм формирования заданий для БПТС.
Преимуществами предложенного подхода являются возможность учёта качественных (нечётких) экспертных оценок, адаптивность к изменяющимся условиям, интеграция с существующими учётными системами сельхозпредприятия на базе конфигурации «1С:Предприятие 8. ERP Агропромышленный комплекс».
Ограничения и недостатки включают: зависимость качества решений от полноты БЗ, необходимость ручного конфигурирования продукционных правил, технические погрешности позиционирования БПТС.
В рассмотренном примере суммарный расход удобрений при использовании предложенного подхода на 7% ниже по сравнению с традиционным методом при сохранении целевого агрономического эффекта. Среднеквадратичное отклонение расчётной нормы от экспертных рекомендаций агронома составило не более 2,4%.
Предложенная структура онтологии может быть адаптирована для решения смежных задач точного земледелия путём расширения БЗ без изменения логики работы системы.
