Автоматизированный стенд для проведения лабораторных работ по изучению пи-регуляторов давления в системе водоснабжения на базе трёхфазного асинхронного электропривода насоса и преобразователя частоты

Автор: Лебедев К.Н., Лебедев П.К.
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Электротехнологии, электрооборудование и энергоснабжение агропромышленного комплекса
Статья в выпуске: 1 (42), 2024 года.
Бесплатный доступ
При подготовке студентов среднего специального и высшего инженерного образования теоретические систематизированные сведения в рамках изучаемых дисциплин должны дополняться практическими работами на действующем оборудовании. В рамках лабораторных работ по дисциплинам, связанным с изучением технических средств промышленной автоматизации в Азово Черноморском инженерном институте ФГБОУ ВО Донской ГАУ разработан и изготовлен стенд для проведения лабораторных работ по изучению ПИ-регуляторов давления в системе водоснабжения на базе трёхфазного асинхронного электропривода насоса и преобразователя частоты. При помощи стенда изучаются такие технические средства, как датчики давления с выходом типа «токовая петля», преобразователи частоты для управления асинхронными электроприводами, цифровые ПИ-регуляторы в системе водоснабжения. В процессе выполнения лабораторной работы производится тарировка измерительной цепи, настройка преобразователя частоты, исследование зависимости переходных характеристик от настроечных параметров ПИ-регулятора.
Автоматизированный стенд, лабораторные работы, физический эксперимент, пи-регулирование, тарировочные и переходные характеристики
Короткий адрес: https://sciup.org/147247504
IDR: 147247504 | УДК: 377.169.3.091.313:65-55:628.1:621.65.02:62-83
Automated stand for laboratory work on the study of pressure regulators in the water supply system based on a three-phase asynchronous electric drive pump and frequency converter
When preparing students of secondary specialized and higher engineering education, theoretical systematized information within the framework of the studied disciplines should be supplemented by practical work on existing equipment. As part of laboratory work in disciplines related to the study of technical means of industrial automation at the Azov-Black Sea Engineering Institute of the Donskoy State Agrarian University, a stand has been developed and manufactured for laboratory work on the study of PI pressure regulators in a water supply system based on a three-phase asynchronous electric drive pump and frequency converter. With the help of the stand, technical means such as pressure sensors with a current loop output, frequency converters for controlling asynchronous electric drives, digital PI regulators in the water supply system are being studied. During the laboratory work, calibration of the measuring circuit, tuning of the frequency converter, and investigation of the dependence of the transient characteristics on the tuning parameters of the PI controller are performed.
Текст научной статьи Автоматизированный стенд для проведения лабораторных работ по изучению пи-регуляторов давления в системе водоснабжения на базе трёхфазного асинхронного электропривода насоса и преобразователя частоты
Рисунок 1 – Система управления насосом на базе ПЧ
В целях совершенствования лабораторной базы Энергетического факультета Азово Черноморского инженерного института ФГБОУ ВО Донской ГАУ нами разработан и изготовлен автоматизированный стенд для проведения лабораторных работ по изучению ПИ - регуляторов давления в системе водоснабжения на базе трехфазного асинхронного электропривода насоса и преобразователя частоты.
Основная часть. Лабораторный стенд (рисунок 2) состоит из шкафа управления, электронасоса, бака для воды, датчика давления, манометра, вентиля для задания режимов работы, пневмогидравлического аккумулятора.
Рисунок 2 – 3 D модель стенда
В шкафе управления используется преобразователь частоты ВЕСПЕР [4], автоматический выключатель, коммутационная и сигнальная аппаратура. Гидроаккумулятор представляет собой расширительный мембранный бак, который также служит для поддержания давления в напорной системе водоснабжения, предотвращения гидроударов и уменьшения числа включений и выключений насоса. Применение гидроаккумулятора позволяет упростить настройку частотного преобразователя, используя ПИ - закон регулирования.
В процессе работы стенда величина давления в подающем трубопроводе измеряется при помощи датчика, преобразующего величину давления в электрический аналоговый сигнал. Если давление падает ниже минимума, то станция управления плавно запускает электронасос для предотвращения гидроудара, затем величина давления поддерживается при помощи изменения частоты вращения.
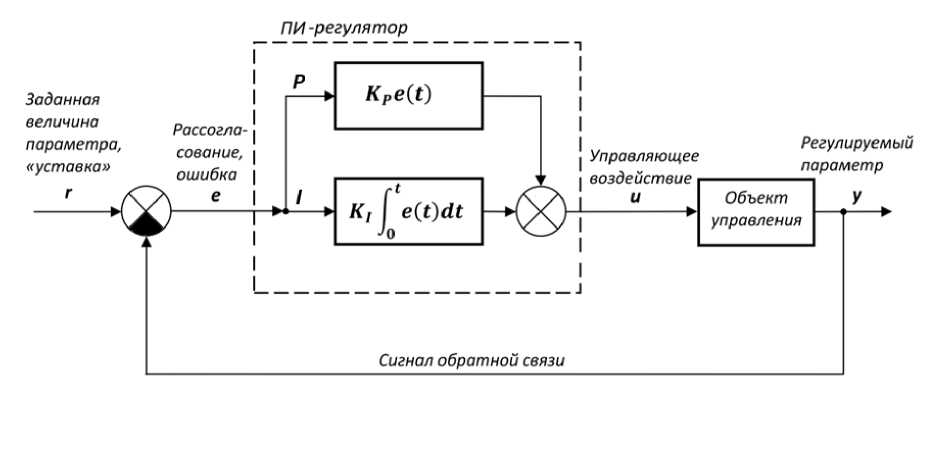
Рисунок 3 – Структурная схема ПИ - регулятора
Наиболее распространённый закон аналогового регулирования при частотном управлении электронасосом – Пропорционально - Интегральный, или коротко ПИ – реализован непосредственно в преобразователях частоты, что существенно упрощает создание подобных систем управления (рисунок 3).
ПИ - регулятор, как и любая система автоматического регулирования с обратной связью, предусматривает наличие двух входов и одного выхода: вход сигнала обратной связи от датчика технологического параметра и вход сигнала уставки регулятора для задания требуемой величины технологического параметра [1, 2, 3]. Выходной сигнал ПИ - регулятора формируется в результате математических вычислений по приведённым на рисунке 3 выражениям с двумя слагаемыми P и I .
Звено пропорциональной ( Р ) составляющей определяет величину выходного сигнала П - регулятора, который формируется в результате сравнения в сумматоре значений двух сигналов: сигнала обратной связи (ОС) и сигнала уставки. Выходной сигнала П - регулятора - это ошибка (рассогласование) управления e(t) , умноженная на коэффициент K P .
Для повышения точности и компенсации статической ошибки, в структуру регулятора вводится звено интегральной составляющей ( I ). В связи с тем, что в интегрирующем звене производится вычисление интеграла, его действие проявляется с течением времени. Степень компенсации статической ошибки регулирования прямо пропорциональна значению коэффициента K i .
От величин коэффициентов настройки ПИ - регулятора зависят не только показатели качества регулирования (точность, быстродействие, величина перерегулирования), но и устойчивость автоматической системы регулирования (АСР) [1, 3].
В установке используется датчик давления DML 330M с аналоговым выходом 4..20 мА, диапазон измерения 0-6 Мпа, а для визуального контроля давления применён стрелочный манометр. Это даёт возможность в цикле лабораторных работ по изучению датчиков автоматики, наряду с теоретическим материалом учебного пособия, провести практический эксперимент по снятию характеристики датчика давления с нормализованным токовым выходом типа «токовая петля». Для этого предусмотрен амперметр, при помощи которого строится тарировочная характеристика датчика давления P=f(I) (рисунок 4, а).
Так как при помощи стенда в цикле лабораторных работ по изучению регуляторов автоматики производится экспериментальное исследование переходных характеристик ПИ - регулирования давления, предусмотрено использование ПЭВМ с платой ввода аналоговых сигналов, а для сопряжения датчика давления с токовым выходом и АЦП используется шунт величиной и RC- фильтр низкой частоты. При снятии токовой характеристики датчика также производится тарировка измерительной цепи P=f(U) (рисунок 4, б).
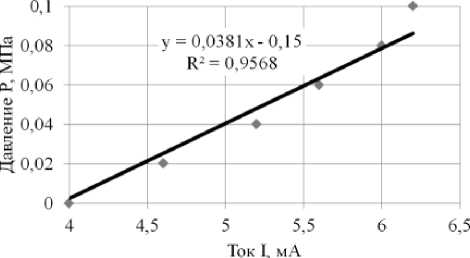
Рисунок 4 – Тарировочные характеристики
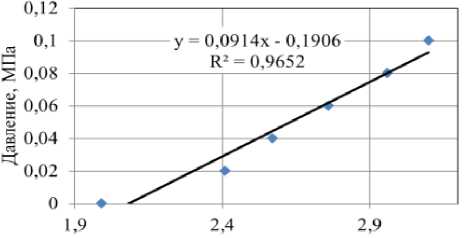
Напряжение, В б
Экспериментальные данные по исследованию характеристик датчика давления и измерительной цепи обрабатываются в электронных таблицах с определением уравнений регрессии [7]. Из технической документации на датчик давления следует, что характеристика линейна, поэтому производится аппроксимация экспериментальных данных уравнением прямой линии.
В процессе изучения принципа действия и настройки ПИ - регулятора давления в системе водоснабжения с преобразователем частоты производится экспериментальное исследование переходных характеристик при изменении коэффициентов усиления по цепи обратной связи, K P и K . Настройка ПЧ производится в соответствии с рекомендациями производителя [4].
В процессе обработки полученных при помощи ПЭВМ переходных характеристик при подаче возмущающих воздействий (например, перекрытием подачи воды вентилем) при помощи электронных таблиц используется полученная ранее тарировочная характеристика измерительной цепи P=f(U) . Пример переходных характеристик при различных величинах настроечного коэффициента Kt представлен на рисунке 5.
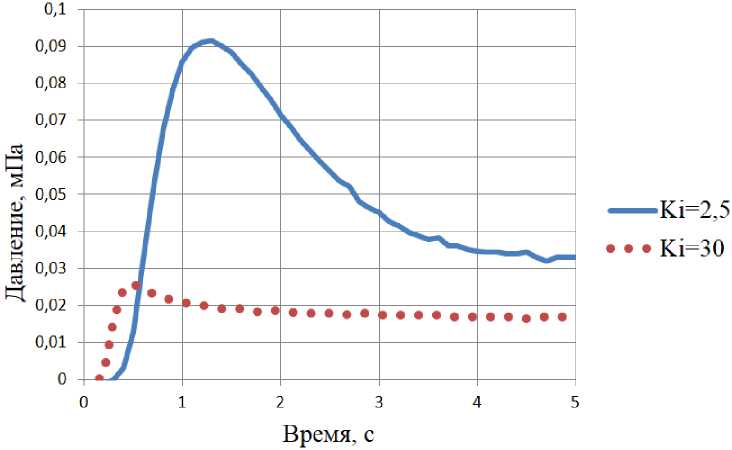
Рисунок 5 – Переходные характеристики ПИ - регулирования давления
Заключение . В связи с тем, что подготовка студентов среднего специального и высшего образования по инженерным направлениям должна сочетать получение систематизированных теоретических знаний с наглядностью физических экспериментов, разработанная нами лабораторная установка позволяет изучать такие технические средства промышленной автоматизации, как датчики давления с выходом типа «токовая петля», преобразователи частоты для управления асинхронными электроприводами, ПИ - регуляторы в системе водоснабжения.
Список литературы Автоматизированный стенд для проведения лабораторных работ по изучению пи-регуляторов давления в системе водоснабжения на базе трёхфазного асинхронного электропривода насоса и преобразователя частоты
- Денисенко В. ПИД регуляторы: принципы построения и модификации // Современные технологии автоматизации. - 2006. - №4/ - C. 66-74.
- Корчевская Ю. В. Возможности регулирования бесперебойной подачи воды в сеть малых населенных пунктов / Ю. В. Корчевская, Г. А. Горелкина // Вестник Алтайского государственного аграрного университета. - 2016. - № 1(135). - С. 138-142. EDN: VNTMZJ
- Лебедев К. Н. Автоматизация управления технологическими процессами: Учебное пособие для студентов высших учебных заведений, обучающихся по направлению "Агроинженерия" / К. Н. Лебедев. - Зерноград: Азово-Черноморский инженерный институт - филиал федерального государственного бюджетного образовательного учреждения высшего образования "Донской государственный аграрный университет" в г. Зернограде, 2013. - 154 с. EDN: WIQEJF
- Рожков А.Е., Вдовенко С.А., Цыганков Е.В. Использование частотных преобразователей (ПЧ) "Веспер" в режиме ПИД-регулирования // Информатизация и системы управления в промышленности. - 2017. - №1 (67). - С.86-90.
- Сельскохозяйственные машины: теория, расчет, конструкция, использование / Ю. А. Судник, В. В. Солдатов, С. А. Андреев [и др.] / Том 12, Часть 2. - Зерноград: Азово-Черноморский инженерный институт - филиал федерального государственного бюджетного образовательного учреждения высшего образования "Донской государственный аграрный университет" в г. Зернограде, 2013. - 560 с. EDN: XPHGRN
- Сельскохозяйственные машины: теория, расчет, конструкция, использование / В. С. Сидоренко, В. И. Антоненко, Р. А. Фридрих [и др. /. Том 7, Часть 2. - Зерноград: Азово-Черноморский инженерный институт - филиал федерального государственного бюджетного образовательного учреждения высшего образования "Донской государственный аграрный университет" в г. Зернограде, 2013. - 696 с. EDN: XMYSGD
- Яковлев В. Б. Линейное и нелинейное оценивание параметров регрессии в Microsoft Excel // Вестник МГПУ. Серия: Информатика и информатизация образования. - 2019. - № 2(48). - С. 58-71. EDN: PTUVJW
