Бифуркационные переходы в динамических системах импульсных стабилизаторов напряжения

Автор: Вороной А.А., Цилимбаев Н.А., Ушмодин В.А.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 2 т.23, 2020 года.
Бесплатный доступ
В данной статье рассмотрены бифуркации в нелинейных динамических системах и уделяется особое внимание бифуркациям - кризисам, которые отождествляются с катастрофами в системах. Качественное изменение фазового портрета, происходящее при изменении параметра системы m, называется бифуркацией фазового портрета. Значение параметра системы m = m0, при котором происходит бифуркация, называется бифуркационным значением параметра (или точкой бифуркации). Приведены математические модели в ненасыщенном режиме; в режиме насыщения. Приведены достаточные условия, при выполнении которых имеет место бифуркация Андронова - Хопфа. Определены количественные соотношения для условий, при которых в системе имеет место бифуркация Андронова - Хопфа. Введены числовые значения параметров, при которых система принимает вполне компактный, но достаточно информативный вид.
Катастрофа, бифуркации, нелинейные системы, фазовый портрет
Короткий адрес: https://sciup.org/140256132
IDR: 140256132 | УДК: 621.316 | DOI: 10.18469/1810-3189.2020.23.2.70-75
Bifurcation transitions in dynamic systems of pulse voltage regulator
In this article bifurcations in nonlinear dynamical systems are considered and special attention is paid to bifurcations-crises, which are identified with catastrophes in systems. The qualitative change in the phase portrait that occurs when the parameter m of the system changes is called the bifurcation of the phase portrait. The value of the system parameter m = m0, at which bifurcation occurs, is called the bifurcation value of the parameter (or bifurcation point). Mathematical models are presented in unsaturated mode; in saturation mode. Sufficient conditions are given under which the Andronov-Hopf bifurcation takes place. Quantitative relations are determined for the conditions under which the Andronov-Hopf bifurcation takes place in the system. Numerical values of parameters are entered, at which the system takes a quite compact, but quite informative form.
Текст научной статьи Бифуркационные переходы в динамических системах импульсных стабилизаторов напряжения
Слово «бифуркация» означает «раздвоение» и употребляется как название любого скачкообразного изменения, происходящего при плавном изменении параметров в любой системе, описываемой системой дифференциальных уравнений [1]. В данной работе изучаются бифуркации фазовых портретов систем дифференциальных уравнений на примере импульсного стабилизатора напряжения (ИСН).
-
1. Математическая модель в ненасыщенном режиме
Запишем уравнения состояния для системы импульсного регулятора в течение двух интервалов включения: импульса DT и паузы D'T . В течение каждого интервала имеет место система линейных дифференциальных уравнений:
– в течение интервала DT S (ключевой транзистор включен)
dx(t)/ х к—^ = A1 x (t)+B1 u;
-
- в течение интервала D' T s (ключевой транзистор выключен)
dx(t)
K—^ = A 2 x (t) + B2 u, где D – коэффициент заполнения импульсов; D' = 1 -D; T - время одного периода ШИМ;
гу ) Гт л
* = x 1 = V L
V 2 7 V C 7
– вектор переменных состояния, являющийся то- ком в индуктивности и напряжением на емкости регулятора; u - входное воздействие; u = V (входное напряжение); Ai, A2 - квадратные матрицы переменных состояния силовой части регулятора, составленные на основании законов Кирхгофа:
|
f- R l |
) 0 |
|
|
A i = |
L |
i |
|
0 |
- |
|
|
V |
rh c 7 |
|
- RL -1 A.= L L A 2 i i —-- |
|
V C rh c 7 |
B i , B 2 - прямоугольные матрицы коэффициентов внешнего источника (входного напряжения), составленные на основании законов Кирхгофа для его силовой части:
B i = B 2 =
' 1'
L о
V 7
Найдем решение системы (1) на интервале DT [2]
x< = A i x + B i u .
Ф ( t ) = e A i1
– фундаментальное решение системы (1).
t x (t ) = e ^^x 0 +J e 1^ Buds
– формула вариации произвольных постоянных, где значение матричного экспоненциала:
Рис. 1. График функции x n + 1
Fig. 1. Graph of the function x n + 1
x2 X0
A2 t 2 A3 t 3
e A 1 1 « I + A1 1 + ^ + -^— + .
1 2! 3!
Рис. 2. Перенос точки покоя в начало координат
Fig. 2. Moving the rest point to the origin
Ввиду малости величины
t
V
f k
A
по абсо- )
лютной величине значение циала принимается равным
матричного экспонен-
e A 1 1 « I + A 1 1 или e A 1 1 - 1 « A i 1 ,
где I =
Желаемая точка покоя xn+1 = xn = x 0, Dn+1 = Dn = D0. (7)
На рис. 1 представлен график функции x n + 1 . Функция x n + 1 получается из функции x n (рис. 2). Подставляя значения (7) в уравнение (6) и решая его относительно x 0 , находим положение равновесия:
0 1
V
– единичная матрица.
e A ( 1 s ) ® I + A 1 ( 1 - s ) .
Следовательно:
t x (1) = (I + Ai 1) xо + J[Biu + BiuAi (1 - s)] ds =
Bu A t 2
= ( I + A11) x 0 + B1 u1 + 1 1 , x (1) = (I + Ai 1) x о + Bi u1.
Решение системы (1) на интервале 0 < 1 < DT s
xn + 1 = xn = x 0 =
= [ I + T s ( D 0 A1 + D 0 A 2 ) ] x 0 +
+ T s ( D 0 B 1 + D 0 B 2 ) u , (8)
x = ( D 0 B 1 + D 0 B 2 ) u
0 D 0 A 1 + D 0 A 2
Удобно для анализа перенести оси координат так, чтобы точка покоя (точка, в которой выходные величины регулятора являются номинальными), находилась в начале координат. Это возможно с помощью замены переменных:
примет вид x (1) = (I + Ai 1) x (0) + Bi u1.
Аналогично найдем решение системы (2) на интервале DT < 1 < T s :
x ( 1 ) = ( I + A 1 ( 1 - DT S ) ) x ( DT S ) + B 1 u ( 1 - DT S ) . (4)
Комбинируя уравнения (1), (2) в моменты времени 1 = DT s и D ‘ T соответственно, с учетом D ‘ T s = 1 - DT s , получаем:
x ( T s ) = [ I + T s ( DA 1 + D ' A 2 ) ] x ( 0 ) + + T s ( DB 1 + D ' B 2 ) u .
Перенося полученное соотношение на n + 1 интервал включения ключевого элемента, получим следующее итерационное выражение:
x ( ( n + 1 ) T s ) = xn + i =
= [ I + T S ( D nA1 + D n A 2 ) ] x n + (6)
+ T S ( D n B 1 + D n B 2 ) u .
Это уравнение является основным уравнением,
которое описывает переходный процесс системы;
это итерация значений x ( T s ) и x ( ( n + 1 ) T s ) .
xn = x 0 + xn , D n = D 0 + d n . (9)
Подставляя выражения формулы (9) в уравнение (6), получим дискретное уравнение, которое описывает работу импульсного регулятора в нор-
мальном, ненасыщенном режиме:
D ‘ =1-D =l-Dn-d =Dk-d , n n 0 n 0 n,
x 0 + xn + 1 =[ I + T s (( D 0 + d n ) A 1 +( D 0 d n ) A 2 ) ]x
x ( x 0 + x n ) + T s ( ( D 0 + d n ) B 1 + ( D 0 - d n ) B 2 ) u
xn + 1 =[ I + T s ( D 0 A 1 + D 0 A 2 ) ] x n +
+ T s [( A 1 - A 2 ) x 0 +( B 1 - B 2 ) u ] d n +
+ T s d n ( A 1 - A 2 ) x n ,
где dn =- fTxn,
f T – матрица-строка коэффициента усиления цепи обратной связи; x n - матрица-столбец векторов состояния.
От дискретного уравнения (10) перейдем к дифференциальному уравнению с помощью аппроксимации разностного оператора дифференциальным (формула Эйлера).
dx (t) = xn+1 - xn dt TS ’ где TS – шаг.
В результате dx ( t )
dt _( D O A 1 + D O A 2 ) x ( t ) +
+ [ ( A 1 - A ) X 0 + ( B 1 - B 2 ) u ] d ( t ) +
+ d(t)(A1 - A2 )X(t), где d (t) = -fTX (t).
Уравнение (13) – непрерывное уравнение, которое описывает работу импульсного регулятора в нормальном, ненасыщенном режиме [3].
Анализ уравнения (13) будет рассмотрен в дальнейшем.
Уравнение (13), описывающее динамику процесса в ненасыщенном режиме, может иметь положения равновесия («виртуальные»), расположенные в физически нереализуемой области или области насыщения.
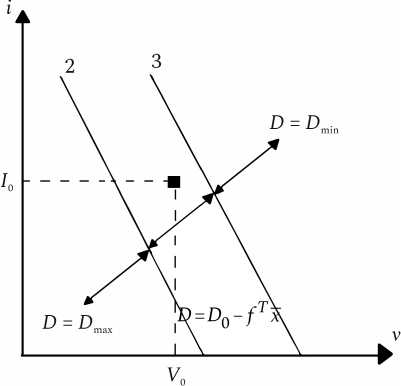
Рис. 3. Насыщенные и ненасыщенный участки ШИМ-регулятора на плоскости векторов состояния. I 0 и V 0 – номинальный ток (ток покоя) в индуктивности и номинальное напряжение (напряжение покоя) на конденсаторе
Рис. 3. Saturated and unsaturated sections of the PWM controller on the plane of the state vectors. I 0 и V 0 are the rated current (quiescent current) in the inductor, and the rated voltage (quiescent voltage) across the capacitor
2. Математическая модель в режиме насыщения
Рассмотрим выражение для коэффициента заполнения импульсов [4]
D ( t ) = D o+ d ( t ) ,
0 (14)
d (t ) = — fi Il — f2 Vc =— fTX, где
D sat = const (или D sat = D min или D sat = D max )* (16)
Уравнение (15) – дискретное уравнение, которое было получено подстановкой замены (16) в уравнение (6).
От дискретного уравнения (15) перейдем к дифференциальному уравнению с помощью аппроксимации разностного оператора дифференциальным (формула Эйлера):
fT - ( f i . f 2 ) ;
X =
ГХЛ x1
V 2 7
^ I, ^
V c
V C 7
;
D 0 – коэффициент заполнения импульсов в номинальном режиме (точке покоя); f 1 – коэффициент усиления цепи обратной связи по току; f 2 – коэффициент усиления цепи обратной связи по на-
пряжению.
D min < D ( t ) < D max ,
D min < D O - f X < D max *
Это иллюстрирует рис. 3.
X n + 1 =[ I + T s ( D sat A 1 + D sat A 2 ) ] ' n +
+ Ts ( DsatBl + DS atB2 ) », где
D S at = 1 - D sat *
Уравнение (15) линейно, так как
dx (t)
-dt 2 = [ D sat A 1 + D s at A 2 ] X ( t ) +
+ ( D sat B 1 + D s at B 2 ) u *
Подставим значения из формулы (7) в уравнение (15) и, решая его относительно x о , находим положение равновесия:
x 0 =
( D sat B 1 + D sat B 2 ) u D sat A 1 + D s at A 2
3. Определение количественных соотношений
Выполним преобразования в уравнении (13):
dx^t) = (D0 A1 + D0 A2) x (t) + [(A1 - A2) x 0 + dt
+ (BA - B2 )u]d(t) + d(t)(A1 - A2)x(t), где d (x ) = -fTx = -f1 x1 - f2 x2; fT =( f1, f2) * Обозначения
.A = D 0 A 1 + D 0 A 2 + ( A 1 - A 2 ) x 0 f T + ( B T - B 2 ) uf T *
|
- ~г 0 A i = ! 0-- V R H C 7 f R L 1 ' L L A 2 = 1 1 |
• ; |
|||||
|
V C R H - f I 0 1 x 0 = Vn ' V 0 7 f- R L A = D 0 L V 0 - R "f Rl ^ - — 0 L — 0 - 1 |
C 0 1 H - |
1 f - |
, + D 0 R L L 1 |
f- R L L V C 1 1 — L 1 |
1 1 — L 1 R H C 7 (t V 0 о |
— F1 , f 2 ) |
|
[V R H C 7 |
V C R H C 7 |
|||||
Тогда система примет вид dxt) = (K-1A + K1 dB) x (t), dt
|
f- ( R L |
+ V 0 f 1 ) |
( D 0 ‘+ V 0 f 2 ) 1 |
|
|
A = |
* |
L |
L |
|
D 0 |
+ 1 0 f 1 |
I 0 f 2 R H - 1 |
|
|
V |
C |
rh c 7 |
|
|
f 1 1 |
|||
|
B 1 = |
B 2 = |
L ; |
|
|
0 V 7 |
RL
|
где |
f |
( R l |
^V 0 f 12 |
( D 0 + V 0 f 2 ) |
|
f L 0 1 K 1 A = |
L |
- L = |
||
|
0 C V 7 |
D 0 |
+ I 0 f 1 |
I 0 f 2 R H - 1 |
|
|
V |
C |
R H C 7 |
||
|
- ( R L + V 0 f 1 ) |
- ( D 0 |
‘ + V 0 f 2 ) |
||
|
= ‘ D 0 + I 0 f 1 |
I 0 f 2 R H - 1 |
; |
||
|
V |
H 7 |
|||
|
f |
1 1 |
|||
|
f L 0 1 |
0 |
L f 0 |
1 1 |
|
|
K 1 B = |
||||
|
0 C |
1 |
n -1 |
0 |
|
|
V 7 |
— |
0 V |
7 |
|
|
V |
C |
7 |
||
|
Обозначим |
||||
|
R1 = R L + V 0 f 1 ; |
||||
|
N 1 = D 0 + V 0 f 2 ; |
||||
|
N 2 = D 0 + I 0 f 1 ; |
||||
|
_ I 0 f 2 R H - 1 R = . 2 RH |
||||
B = A 1 - A 2 =
L
0
0
-L
R H C 7
В результате получим следующую систему:
|
f x 1л V x 2 7 |
" |
f- R1 - N 1' V N 2 R 2 7 |
+ (- f 1 x 1 - f 2 x 2 ) |
f 0 - 1 V |
1 1" 01 |
x 1 V x 2 7 |
; |
|
1 x 1 1 ^^2 |
- R 1 x 1 N 1 x 2 f 1 x 1 x 2 f 2 x 2 , = N 2 x 1 + R 2 x 2 + f 1 x 1 + f 2 x 1 x 2 . |
(20) |
|||||
|
f R l 1 " |
||
|
LL |
||
|
— - |
1 1 |
^^^^^^ |
|
V С "R H C 7 |
(
—
I C
L
0
В результате обозначения получим систему сле-
дующего вида:
dx ( t )
-----= ( A + dB ) x ( t ).
dt
(19)
Введем нормированную матрицу K равенством:
K =
1
L
0
K 1
0
V
_ ' L
= 0
1
C 7
;
о ^
C
;
Kdxt = ( a + dB ) x ( t ). dt
•w
Вычислим матрицу системы (20), линеаризованную в окрестности нулевой точки покоя:
|
f d F 1 |
d F 1" 1 |
|
|
A = |
d x 1 |
a x 2 |
|
d F 2 |
d f 2 |
|
|
Vd x 1 |
d x 2 7 |
x i = 0, x 2 = 0;
|
A = |
- R1 |
- N 1' |
|
V N 2 |
R 2 7 |
Составим характеристическое уравнение ма-
трицы A:
| A -Xe| =
- R i
-
X
- N 1
N2
R2
-
X
= X 2 + ( R 1 - R 2 ) X + N 1 N 2 - R 1 R 2 = 0.
Или, что то же самое:
| A -X E | = X 2 +
r ( I f)RH - 1
R L + V f 1 - — H I RH
+ ( D 0 + V 0 f 2 )( D 0 + I 0 f 1 ) -
( R L + V 0 f 1 ) ( I 0 f 2 R H 1 ) RH
x+
параметр) в системе имеет место бифуркация Андронова – Хопфа.
Введем числовые значения параметров для системы (20):
f = 0,1; R = R, + Vf = 5,75;
1 1 L 01
Найдем корни характеристического уравнения (21):
f = 1; N = D ‘ + V f = 37,9; R = 2; 2 1 0 02 L
3 75
D = b 2 - 4 ac =
—
R L + V 0 f 1 -
I 0 f 2 R H 1
RH
—
N q = D ‘ + 1 f = 0,4 +-- ; V = 37,5;
2 0 01 0
RH
|
R = I 0 f 2 RH - 1 = 2 RH |
36,5 "HT ; |
D 0 |
= 0,6; |
|
D 0 = 1 - D 0 = 0 4; |
I 0 = |
V 0 = RH |
37,5 :----------------------------------------- RH |
Система (20) примет следующий вид:
X 1 = - 5,75 X 1 - 37,9 x 2 - 0,1 X 1 x 2 - x 2 ,
—
;
J
RH
4 ( ( D 0 + V « f 2 )( D 0 + 1 0 f 1 ) -
V
( R L + V 0 f 1 )( I 0 f 2 R H - 1 ) ,
|
X! =- 1 1 2 |
Л R L < |
+ V 0 f 1 - |
( I 0 f 2 RH 1 ) + „ V RH J |
) ^ J |
|
X2 =- 1 2 2 |
( R L V |
+ V 0 f 1 - |
I 0 f 2 RH - 1 ) V R h J"' |
) /D J |
Xt2
0,4

36,5
x^ +-- x 2 + 0,1 x^ + x1x 2,
1 RH 2 1 12
„ x e R , Rh e R, Rh - параметр.
Приведем достаточные условия, при выполнении которых имеет место бифуркация Андронова – Хопфа.
ц -параметр:
1) Х 1 ( ц ), X 2 ( ц ) - корни характеристического уравнения (21) оказываются чисто мнимыми при
ц = ц 0;
-
2) Re Х^ц ) = Re X 2 ( ц ) = 0, при Ц = Цо ;
d (Re Xt ( ц ))
-
3) ---------- * 0 при ц = Ц о .
d ц
^ при ц = ц о система (20) обладает однопараметрическим семейством периодических решений.
Значение ц = ц о является точкой бифуркации для системы (20).
Будем считать все параметры системы фиксированными, кроме R h . Исследуем условия, при которых при изменении RH (бифуркационный
Заключение
В результате качественного описания проблемы устойчивости и бифуркаций ИСН можно тем не менее сделать определенные выводы. Эволюция динамических систем сопровождается потерей устойчивости одними режимами функционирования и бифуркационными переходами их в новые. Эти «фазовые переходы» могут осуществляться плавно, мягко, а могут происходить скачкообразно, в виде катастроф. Строгий математический анализ устойчивости и бифуркаций позволяет сегодня практически рассматривать широкий спектр проблем, связанных с исследованиями бифуркационных переходов в динамических системах импульсных стабилизаторов напряжения. Но при этом необходимо опираться на строгие математические результаты и использовать обоснованные методы теоретического и качественного анализа.
Список литературы Бифуркационные переходы в динамических системах импульсных стабилизаторов напряжения
- Антипов О.И., Неганов В.А. Анализ и прогнозирование поведения временных рядов: бифуркации, катастрофы, синергетика, фракталы и нейронные сети. М.: Радиотехника, 2011. 350 с.
- Antipov O.I., Neganov V.A. Analysis and Prediction of the Behavior of Time Series: Bifurcations, Disasters, Synergetics, Fractals and Neural Networks. Moscow: Radiotehnika, 2011, 350 p. (In Russ.)
- Белых В.Н. Элементарное введение в качественную теорию и теорию бифуркаций динамических систем // Соросовский образовательный журнал. 1997. № 1. С. 115-121.
- Belyh V.N. An elementary introduction to the qualitative theory and theory of bifurcations of dynamical systems. Sorosovskij obrazovatel'nyj zhurnal, 1997, no. 1, pp. 115-121. (In Russ.)
- Дмитриков В.Ф., Шушпанов Д.В. Устойчивость и электромагнитная совместимость устройств и систем электропитания. М.: Горячая линия - Телеком, 2018. 540 с.
- Dmitrikov V.F., Shushpanov D.V. Stability and Electromagnetic Compatibility of Devices and Power Supply Systems. Moscow: Gorjachaja linija - Telekom, 2018, 540 p. (In Russ.)
- Дмитриков В.Ф., Шушпанов Д.В. Основные научные проблемы построения отечественных агрегатированных (сложных) приборов и распределенных систем вторичного электропитания и причины отставания их характеристик от современных зарубежных аналогов // Физика волновых процессов и радиотехнические системы. 2018. Т. 21. № 3. С. 7-11. URL: https://journals.ssau.ru/index.php/pwp/article/view/7011.
- Dmitrikov V.F., Shushpanov D.V. The main scientific problems of building domestic aggregated (complex) devices and distributed power supply systems and the reasons for their characteristics lagging behind modern foreign analogs. Physics of Wave Processes and Radio Systems, 2018, vol. 21, no. 3, pp. 7-11. URL: https://journals.ssau.ru/index.php/pwp/article/view/7011. (In Russ.)
