Биомеханические аспекты накостного остеосинтеза поперечных и косых диафизарных переломов длинных костей Z-образной и волнообразной пластинами

Автор: Стеблина Е.В., Шайко-шайковский А.Г.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 3 (29) т.9, 2005 года.
Бесплатный доступ
Рассмотрена возможность создания условий для динамического остеосинтеза с помощью Z-образных и волнообразных накостных малоконтактных пластин при поперечных и косых диафизарных переломах длинных костей. Предложена расчётная методика для определения взаимных перемещений отломков поврежденной кости при использовании предложенных конструкций. Показано, что применение пластин с волнообразным демпфером является более предпочтительным вследствие бoльшего приближения деформативности такой биотехнической системы к деформационным параметрам целой неповрежденной кости.
Биотехническая система, остеосинтез, накостная пластина, перемещение, демпфер
Короткий адрес: https://sciup.org/146215837
IDR: 146215837 | УДК: 531/534:
Текст научной статьи Биомеханические аспекты накостного остеосинтеза поперечных и косых диафизарных переломов длинных костей Z-образной и волнообразной пластинами
В настоящее время при оперативном лечении переломов костей и их последствий реализуется новая концепция остеосинтеза, принципы которой заключаются в максимально стабильном соединении отломков с возможностью их микродинамизации в условиях безыммобилизационного режима пациентов в послеоперационном периоде. При этом всё большее распространение приобретают так называемые пластины с минимальным контактом, обеспечивающие необходимый приток крови к месту перелома, что, по единодушному мнению большинства авторов, является одним из основных условий успешного срастания отломков, образования костной мозоли [1]. Вместе с тем, такие пластины [1] имеют ряд существенных недостатков: конструкция малоконтактных пластин неизбежно связана с уменьшением площади их поперечного сечения, что снижает прочность всей биотехнической системы, возникает эффект шунтирования, приводящий к вымыванию кальция из отломков костей и, нередко, к повторным переломам. Кроме того, известные конструкции позволяют осуществлять, как правило, лишь статический вариант остеосинтеза. В настоящее время всё большее число исследователей склоняется к мнению, что более предпочтительным в большинстве случаев является динамический вариант остеосинтеза, обеспечивающий микродинамизацию отломков кости, что существенно благоприятствует их сращению. Для интенсификации процесса лечения, уменьшения количества осложнений на современном этапе развития травматологии и
ортопедии необходимо внедрение современного малоинвазивного накостного остеосинтеза пластинами с ограниченным контактом. Эти методы позволяют сократить сроки стационарного лечения и периода реабилитации больных [2].
В работе рассмотрены конструкции накостных пластин с Z-образными и волнообразными демпферами, позволяющими «регулировать» жёсткость биотехнической системы «кость-пластина» [3, 4]. Предложенные расчётные методики позволяют оценить влияние размеров поперечного сечения накостных пластин, радиусов закругления Z-образных и волнообразных демпферов, числа полуволн волнообразных пластин на деформационные параметры системы, подбирать конструктивные параметры фиксаторов с целью максимального приближения деформативности биотехнической системы к соответствующим параметрам целой неповрежденной кости.
Целью исследования является разработка инженерной расчётной методики оценки деформативности биотехнической системы «кость-пластина» при использовании Z-образных и волнообразных накостных пластин для остеосинтеза поперечных и косых диафизарных переломов длинных костей.
Материалы и методы
Z-образная и волнообразная пластины предназначены для фиксации отломков кости при поперечных и косых диафизарных переломах длинных костей. В конструкции предусмотрены сквозные динамические компрессионные отверстия для фиксирующих винтов.
Накостные пластины с демпферами представляют собой конструкцию, имеющую две контактные опорные площадки и мостообразную приподнятую часть, не контактирующую с костью. Два участка по бокам центральной мостообразной части корпуса пластины являются своеобразными демпферами, упругие параметры которых определяются числом полуволн и радиусами их закругления. В конструкции предусмотрены сквозные специальные компрессионные отверстия для фиксации пластины. Форма боковых стенок отверстий и головок фиксирующих винтов позволяет создавать компрессию в зоне перелома. Контактные площадки имеют форму желоба, что обеспечивает бoльшую стабильность крепления корпуса пластины на костных отломках.
Результаты исследования и их обсуждение
Деформация прямолинейных участков биотехнической системы определялась с помощью закона Гука в абсолютных значениях для растяжения-сжатия [5]:
Pl δ= , EF
где δ – осевое перемещение; Р – продольная сила (в нашем случае – вес пациента), Р =90 кг; l – длина исследуемого участка кости; Е – модуль упругости I-го рода (для кости E =1,18 ⋅ 105 кг/см2, для материала пластины – сталь 12Х18Н9Т – Е =2,26 ⋅ 105 кг/см2); F – площадь поперечного сечения (кости или пластины).
a
б
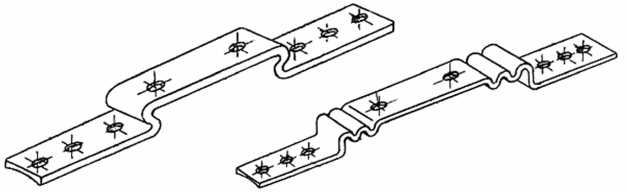
Рис. 1. Конструкция Z-образной накостной пластины (а) и пластины с волнообразным демпфером (б)
a б
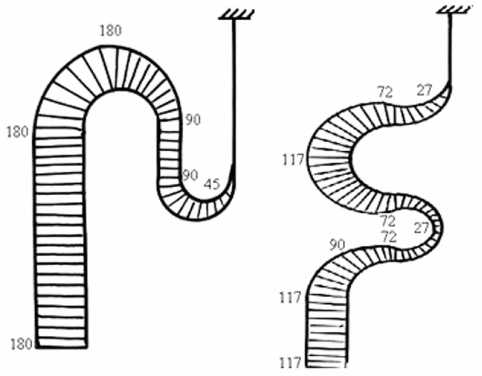
Рис. 2. Эпюры изгибающих моментов М ( х ) и М 1 (Z-образная пластина (а) и пластина с волнообразным демпфером (б))
Осевые перемещения, возникающие в корпусе пластины на ее криволинейных участках, определялись с помощью интегралов Мора, вытекающих из энергетических методов определения перемещений в упругих системах [5]:
δ = n M ( x ) M 1
dl i ,
i = 1 EI
i где δ – осевые перемещения, возникающие в материале пластины на криволинейных участках; I – момент инерции поперечного сечения пластины относительно нейтральной оси; M (x) – значения изгибающего момента от внешних сил, действующих на корпус фиксатора; M1 – значения изгибающего момента от единичной силы, действующей в осевом направлении, li – длина i-го участка фиксатора.
Расчётная методика позволяет учесть зависимость деформативности фиксатора от его длины, формы и размеров поперечного сечения, числа полуволн демпфирующих участков и радиусов их закругления. Изгибающие моменты определялись из соответствующих уравнений для каждого участка фиксатора. Эпюры изгибающих моментов от внешних сил и от единичной силы показаны на рис. 2.
Общая деформация биотехнической системы „кость-пластина” для обоих случаев фиксации с помощью Z-образной пластины и пластины с волнообразным демпфером определялась как сумма осевых деформаций конструкции на прямолинейных и криволинейных участках. Величина осевого усилия принималась равной среднему весу тела пациента.
Таблица 1
Осевые деформации, возникающие в корпусе Z-образной пластины в зависимости от радиуса полуволн демпфирующего участка
|
№ |
Размеры поперечного сечения пластины, (см) |
Радиус закругления |
||
|
R =0,5 см |
R =0,75 см |
R =1,0 см |
||
|
Осевая деформация (см) |
||||
|
1 |
h =0,3; b =1,2 |
0,112 |
0,412 |
1,012 |
|
2 |
h =0,35; b =1,3 |
0,072 |
0,252 |
0,592 |
|
3 |
h =0,4; b =1,4 |
0,047 |
0,157 |
0,371 |
|
4 |
h =0,4; b =1,5 |
0,031 |
0,101 |
0,251 |
|
5 |
h =0,5; b =1,6 |
0,020 |
0,069 |
0,161 |
Таблица 2
Осевые деформации, возникающие в корпусе пластины с волнообразным демпфером в зависимости от радиуса полуволн демпфирующего участка (количество полуволн – 2)
|
№ |
Размеры поперечного сечения пластины, (см) |
Радиус закругления |
||
|
R =0,3 см |
R =0,4 см |
R =0,5 см |
||
|
Осевая деформация (см) |
||||
|
1 |
h =0,3; b =1,2 |
0,013 |
0,04 |
0,09 |
|
2 |
h =0,35; b =1,3 |
0,0075 |
0,023 |
0,052 |
|
3 |
h =0,4; b =1,4 |
0,0047 |
0,015 |
0,033 |
|
4 |
h =0,4; b =1,5 |
0,0032 |
0,0097 |
0,022 |
|
5 |
h =0,5; b =1,6 |
0,0021 |
0,0065 |
0,014 |
Таблица 3
Осевые деформации, возникающие в корпусе пластины с волнообразным демпфером в зависимости от радиуса полуволн демпфирующего участка (количество полуволн – 4)
|
№ |
Размеры поперечного сечения пластины, (см) |
Радиус закругления |
||
|
R =0,3 см |
R =0,4 см |
R =0,5 см |
||
|
Осевая деформация (см) |
||||
|
1 |
h =0,3; b =1,2 |
0,02 |
0,073 |
0,16 |
|
2 |
h =0,35; b =1,3 |
0,014 |
0,043 |
0,094 |
|
3 |
h =0,4; b =1,4 |
0,0089 |
0,027 |
0,052 |
|
4 |
h =0,4; b =1,5 |
0,006 |
0,018 |
0,039 |
|
5 |
h =0,5; b =1,6 |
0,0039 |
0,012 |
0,026 |
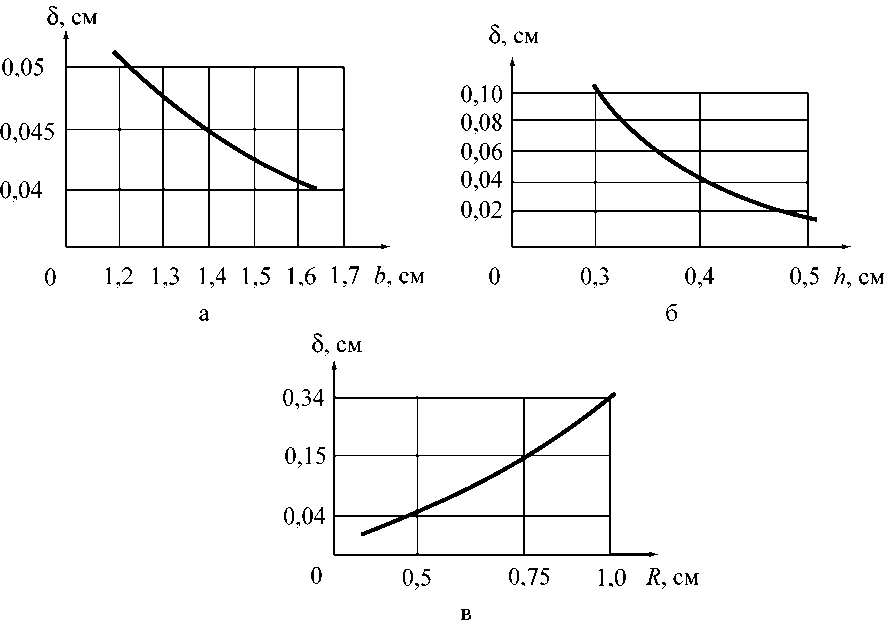
Рис. 3. Графические зависимости осевого перемещения от размеров поперечного сечения (Z-образная пластина): а) R =0,5 см, h =0,4 см; б) R =0,5 см, b =1,5 см; в) b =1,5 см, h =0,4 см
Как известно, целью создания любой фиксирующей конструкции является максимальное приближение биомеханических показателей системы к деформативным параметрам целой кости. Нами проведено исследование зависимости деформативности обеих конструкций (рис. 1.) от их конструктивных параметров: ширины и толщины сечения корпуса пластин, числа полуволн (для волнообразной пластины) и радиусов их закругления. В таблицах 1–3 представлены результаты расчётов осевой деформации рассмотренных конструкций пластин в зависимости от их конструктивных параметров. Так, в таблице 1 приведены величины осевых деформаций Z-образной пластины в зависимости от величины радиуса закругления полуволн при различных размерах прямоугольного сечения корпуса пластины.
В таблице 2 представлены расчётные величины осевых деформаций в корпусе пластины с волнообразным демпфером с двумя полуволнами в зависимости от их радиуса закругления и возможных значений размеров поперечного сечения корпуса пластины.
В таблице 3 даны расчётные величины осевых деформаций в корпусе пластины с волнообразным демпфером с четырьмя полуволнами в зависимости от их радиуса закругления и возможных значений размеров поперечного сечения корпуса пластины.
Расчётным путём получено, что осевая деформация участка целой неповреждённой кости между фиксирующими винтами обеих конструкций при статическом нагружении: 5 bn =0,00185 см.
При динамическом нагружении опорно-двигательного аппарата, при ходьбе эта величина возрастает пропорционально коэффициенту динамичности:
5 dn = K d 5 st , (3)
где 5 st - осевая деформация при статическом нагружении; 5 dn - осевая деформация при динамическом нагружении; Kd – коэффициент динамичности.
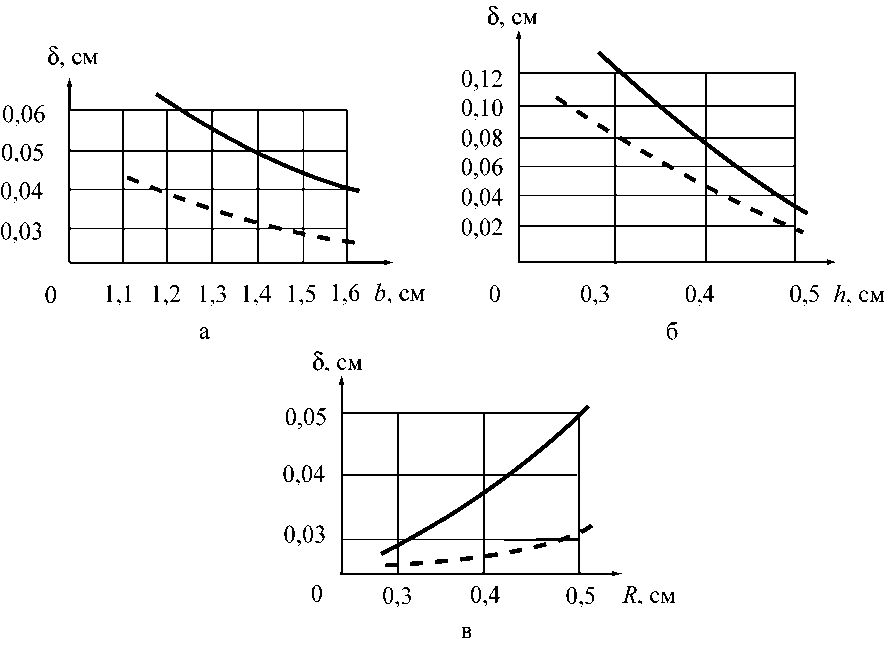
Рис. 4. Графические зависимости осевого перемещения от размеров поперечного сечения (волнообразная пластина): а) R =0,5 см, h =0,4 см; б) R =0,5 см, b =1,5 см; в) b =1,5 см, h =0,4 см
Величина коэффициента динамичности K д , особенно при неосторожных движениях, потере равновесия и т.д., может достигать существенных значений, в зависимости от массы тела пациента и возникающего ускорения. Это означает, что полученное расчётным путем значение может увеличиваться в несколько раз и даже на порядок. На рис. 3 приведены графические зависимости осевого перемещения Z-образной пластины в зависимости от ширины поперечного сечения (рис. 3а), толщины поперечного сечения (рис. 3б) и величины радиусов полуволн демпфирующего участка при заданных размерах сечения (рис. 3в)
На рис. 4 приведены графические зависимости осевого перемещения волнообразной пластины для двух вариантов конструкций с 4-я и 2-я полуволнами в демпфирующей части в зависимости от ширины поперечного сечения (рис. 4а), толщины поперечного сечения (рис. 4б), величины радиуса закругления полуволн (рис. 4в).
Анализ графических зависимостей на рис. 3 позволяет сделать вывод, что осевая деформация, возникающая в корпусе Z-образной пластины существенно зависит от размеров поперечного сечения пластины. При уменьшении ширины пластины в 1,5 раза осевые деформации увеличиваются в 1,25 раза, а при снижении толщины пластины в 1,5 раза осевые деформации возрастают в 5 раз. Осевые деформации убывают также при уменьшении радиуса закруглений демпферов Z-образной пластины. Анализ графиков на рис. 4 показал, что осевые деформации в корпусе волнообразной пластины также зависят от размеров поперечного сечения, как и в Z-образной пластине. Кроме этого, увеличение числа полуволн в 2 раза влечет за собой увеличение осевой деформации в 1,5–1,8 раза.
Выводы
-
1. Предложена расчётная методика для определения взаимных перемещений отломков поврежденной кости при использовании Z-образной и волнообразной пластин.
-
2. Расчётным путём определено влияние геометрических параметров сечения пластин, длины, радиусов закругления демпфирующих участков на деформативные характеристики фиксаторов: Z-образной и волнообразной пластин.
-
3. Показано, что применение пластин с волнообразным демпфером является более предпочтительным, поскольку в этом случае деформативность биотехнической системы «кость-пластина» наиболее близка к соответствующим параметрам целой неповреждённой кости.
