Биомеханический анализ водных локомоций на основе методики пространственной реконструкции гребка

Автор: Померанцев А.А.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 1 (63) т.18, 2014 года.
Бесплатный доступ
В настоящее время большой интерес для изучения представляют водные локомоции в спорте. Игры Олимпиады включают 302 комплекта наград, из которых 68 разыгрываются в водной среде (гребля академическая - 14, гребля на байдарках и каноэ - 16, плавание - 34, водное поло - 2, синхронное плавание - 2). Понимание фундаментальных законов гидродинамики и биомеханики, выявление оптимальных параметров движения спортсменов в этих видах спорта в конечном счете определяют спортивный престиж России. Целью работы является создание методики пространственного анализа водных локомоций на основе скоростной видеосъемки, пространственной реконструкции и компьютерной визуализации. В качестве примера исследуется гребок, выполненный профессиональным спортсменом. Статья содержит исторический обзор изучения водных локомоций от работ Леонардо да Винчи до появления мощных компьютеров, а также описание сложностей, связанных с изучением движения в водной среде. Для пространственной регистрации гребка были использованы две высокоскоростные видеокамеры с частотой съемки 250 кадров в секунду, оптические оси которых были перпендикулярны. Для реконструкции траектории движения лопасти под водой были взяты четыре контрольные точки: место хвата весла левой руки, место хвата правой руки, середина древка весла, светоотражающий маркер антенны. Антенна представляла собой самодельное устройство, прикреплявшееся в середине древка весла для определения угла вращения весла вокруг собственной оси. Компьютерная реконструкция подводной траектории гребка осуществлялась по найденным пространственным координатам четырех видимых точек, служащих основанием для дальнейших расчетов. Для детального изучения взаимодействия весла с водой выполнялась реконструкция траекторий одиннадцати точек, лежащих по периметру лопасти. Для автоматизации вычислений и визуализации пространственной реконструкции движения весла в гидродинамической среде было написано специализированное компьютерное приложение Grebok 1.1, разработанное в среде программирования Borland Delphi с использованием открытой графической библиотеки OpenGL.
Биомеханика спорта, гребля на байдарках, пространственная реконструкция, моделирование, визуализация, гребок
Короткий адрес: https://sciup.org/146216126
IDR: 146216126 | УДК: 531/534:
Текст научной статьи Биомеханический анализ водных локомоций на основе методики пространственной реконструкции гребка
Гребок – процесс создания продвигающей силы в гребле за счет взаимодействия лопасти весла с водой. Гребля на байдарках – вид спорта, основанный на сложном движении, результат в котором во многом обусловлен не только физическими
Померанцев Андрей Александрович, к.п.н., доцент кафедры профессиональной подготовки учителей физической культуры, Липецк кондициями (сила, выносливость, быстрота), но и техникой движения – способностью правильно прикладывать силу и рационально использовать энергию.
С древнейших времен лодки, челноки, плоты являются неотъемлемым атрибутом жизни человека, и с древнейших же времен человек пытается осмыслить гребок и греблю. Впервые в истории механизм гребка научно исследовал Леонардо да Винчи, который изучал локомоции животных в воде [5].
До второй половины XX века достоверных данных о движении весла в воде в гребле на байдарках не было. В лучшем случае анализ сводился к дорисовке подводных положений лопасти по кадрам надводной киносъемки [1, 2].
Гребок представляет собой трехмерное пространственное движение, следовательно, и его изучение должно быть пространственным [3, 4].
Гребная локомоция происходит одновременно в аэро- и гидродинамической средах, и поэтому существенная смысловая часть гребка – подводная траектория движения лопасти – в значительной степени остается недоступной для анализа. Тренеры могут судить о подводной траектории лишь визуально, косвенно анализируя движение надводной части весла. Такой подход недостаточно информативен и часто является ошибочным.
До появления мощных персональных компьютеров и высокоскоростных видеокамер биомеханику гребли изучали с помощью стерео- и циклофотосъемки: фотографировали световые следы лампочек – меток на весле и лодке. В ряде случаев проводилась подводная киносъемка.
Качественная работа, соответствующая возможностям времени, была выполнена Красновым и представлена в виде кандидатской диссертации «Биомеханика гребка, поступательного движения лодки и оценка техники движений в гребле на байдарках» в 1983 г. [3].
Подводная видеосъемка в гребле на байдарках не получила широкого распространения. Причинами тому стали мутная вода естественных водоемов и гребных каналов, сложность определения места гребка, высокая стоимость скоростных видеокамер для подводной съемки.
Современное развитие компьютерной техники и программного обеспечения открывает новые возможности для исследований гребка на более фундаментальном уровне [6].
Методика и организация исследования
Для трехмерной (пространственной) реконструкции движения весла необходимы как минимум две камеры, снимающие гребок, оптические оси которых должны быть перпендикулярны друг другу и направлены на объект съемки.
Идеальным вариантом можно считать съемку, осуществляемую двумя камерами: сбоку (сагиттальная плоскость) и сверху (горизонтальная плоскость). Съемка сверху наряду с существенным преимуществом имеет недостаток: она достаточно затруднительна, так как требует большой высоты для исключения перспективных искажений. В работе был выбран другой вариант расположения камер: вид сбоку (сагиттальная плоскость) и вид спереди (фронтальная плоскость).
В данном исследовании были использованы две высокоскоростные цифровые видеокамеры, характеристики которых представлены ниже. Положение видеокамер при съемке изображено на рис. 1.
На рис. 2 представлена видеограмма выполнения гребка, сделанная скоростной видеокамерой. Временной интервал между кадрами составляет 0,004 с. Шаг раскадровки составляет 8 кадров или 8 ∙ 0,004 = 0,032 с.
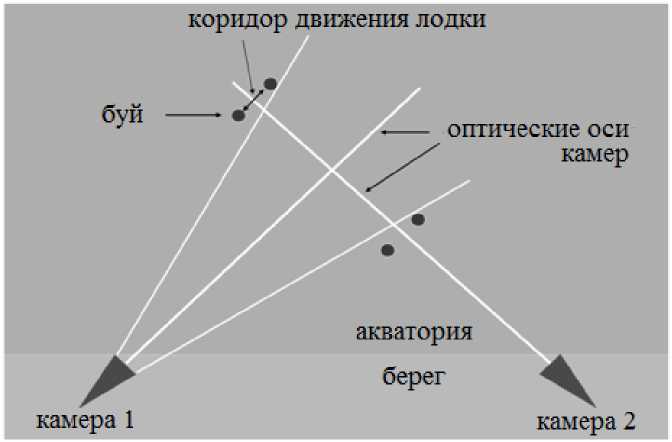
Рис. 1. Схема проведения съемки
Технические характеристики видеокамер:
|
Характеристики |
Камера 1, 2 |
|
Название, модель |
Fastec InLine 1000 |
|
Носитель информации |
1 Гб встроенной памяти |
|
Частота съемки, кадров в секунду |
250 (до 1000) |
|
Скорость затвора, с |
1/1000 |
|
Матрица |
монохромная |
Изучение исключительно видеограммы будет представлять плоскостной или двумерный (2 D ) анализ. Видеограмма – это ряд последовательных фотографий (проекций на плоскость), а гребок – это сложное пространственное движение; анализ видеограммы сведется к изучению мнимых (кажущихся) углов, т.е. проекции реальных пространственных углов на перпендикулярную оптической оси камеры плоскость.
Например, согнутая в локтевом суставе рука на кадре 97 (см. рис. 2) дает мнимый острый угол, хотя в реальном трехмерном пространстве этот угол однозначно будет тупым.
Таким образом, видеограмма может служить отличным методическим пособием при обучении гребле начинающих спортсменов, но совершенно не подходит для научных исследований.
Для реконструкции траектории движения лопасти под водой достаточно всего четыре контрольных точки: 1) хват левой руки; 2) хват правой руки; 3) середина древка весла; 4) светоотражающий маркер антенны.
Антенна (рис. 3) представляет собой самодельное устройство, включающее хомут, велосипедную спицу и круглый маркер-отражатель. Устройство крепилось в середине древка весла с помощью затягивающегося хомута. Данное приспособление необходимо для определения угла вращения весла вокруг собственной оси.
Основным требованием к антенне является жесткость конструкции и отсутствие колебаний при гребке, которые способны вызвать погрешности при расчетах. Длина антенны без хомута составляет 260 мм.
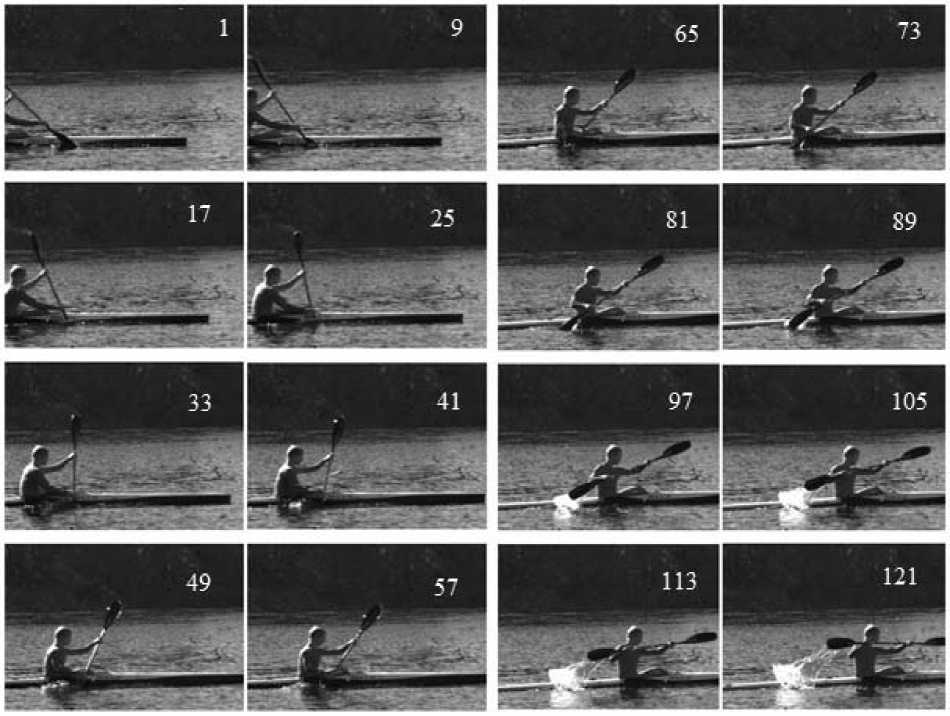
Рис. 2. Видеограмма выполнения гребка мастера спорта международного класса (числа обозначают номера кадров)
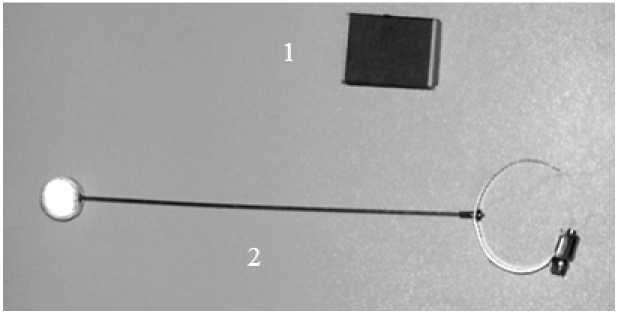
Рис. 3. Антенна ( 2 ), позволяющая определить поворот весла относительно собственной оси
Во время выполнения гребка возникает деформация весла под действием силы, однако это явление незначительно. Применительно к поставленной задаче разумно ввести допущение, что весло является абсолютно твердым телом, лишенным деформации с постоянными линейными размерами. Как показали дополнительные расчеты, такой подход не приводит к сколько-нибудь существенным погрешностям.
Для анализа гребка была использована правая декартова система прямоугольных координат. При этом три взаимно перпендикулярные координатные оси были направлены следующим образом:
-
– ось абсцисс – положительное направление совпадает с направлением движения лодки;
-
– ось ординат – вертикальная ось с положительным направлением вверх;
-
– ось аппликат – ось, совпадающая с оптической осью камеры, положительное направление ориентировано в сторону наблюдателя.
Началом координат являлась точка, лежащая в левом нижнем углу кадра скоростной камеры № 1 и в плоскости симметрии лодки.
Для определения линейных характеристик требуется ввести стандартизированный тест-объект, позволяющий оценить соотношение его длины в метрах и его отображение на экране в пикселях. При изучении гребли возникает определенная сложность, заключающаяся в том, что невозможно просто поставить стандартный тест-объект на воду. Возможными альтернативами являются создание плавающего тест-объекта либо фиксация стандартного тест-объекта на шлюпке. Вместе с тем часто сама байдарка, проходящая в сагиттальной плоскости, представляет собой идеальный тест-объект стандартизованной длины.
В целях уменьшения погрешности и исключения перспективного искажения автором был использован длиннофокусный объектив и принято оптимальное приближение объекта съемки. При таком приближении лодка полностью не входила в кадр и, следовательно, ее полная длина не могла быть использована в качестве тест-объекта. Исходя из этого было принято решение установить две контрольные точки (рис. 4) выше ватерлинии, которые служили тест-объектом при съемке камерой № 1. Расстояние между точками составляло 600 мм. Таким образом, однажды зафиксированный тест-объект служил для анализа всего видеоряда, снятого этой камерой.
С использованием компьютерной программы биомеханического анализа Tracker VideoMotion были проанализированы два снятых видеоряда двумя перпендикулярно расположенными видеокамерами. В результате анализа были получены координаты контрольных точек в плоскостях Oxy – видеокамера № 1 (сагиттальная плоскость) и Oyz – видеокамера № 2 (фронтальная плоскость). С учетом того, что оптические оси камер находились под углом 90º, а также поправки на изменение масштаба при приближении гребца (камера № 2), были получены пространственные координаты всех видимых исследуемых точек.

Рис. 4. Линейные размеры весла с лодкой и прикрепленная антенна (кадр из видеоряда, сделанного скоростной камерой Fastec Inline )
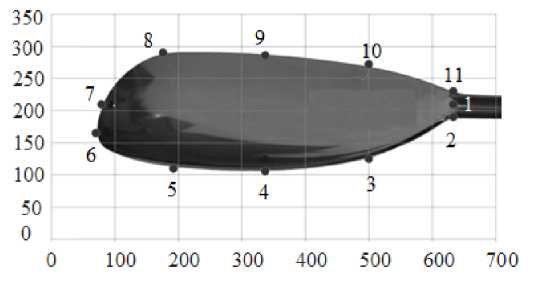
Рис. 5. Пространственная реконструкция одиннадцати периферических точек весла
Лопасть байдарочного весла имеет сложную трехмерную структуру. Для первоначальной реконструкции были взяты только одиннадцать точек, лежащих по периметру лопасти (рис. 5).
Гребок выполнялся веслом Jantex BETA Large : длина лопасти L = 520 мм, ширина W = 170 мм. Значения были приняты по результатам инструментальных измерений. Зная координаты выбранных точек весла в пикселях и основные линейные размеры лопасти, рассчитывали координаты точек лопасти в миллиметрах.
Для удобства в расчетах точка № 1 – основание лопасти – была выбрана в качестве точки отсчета новой системы координат, а координаты оставшихся десяти точек были пересчитаны относительно нее.
Определив пространственные координаты видимых контрольных точек на всех кадрах видеоряда, используя математический метод линейной экстраполяции, находили траектории движения одиннадцать периферийных точек лопасти, а также осуществляли пространственную реконструкцию подводной траектории гребка (рис. 6).
Как показывает реконструкция, ни одна точка лопасти, вследствие вращения весла вокруг собственной оси, не повторяет движение других точек, а движется по сложной криволинейной траектории.
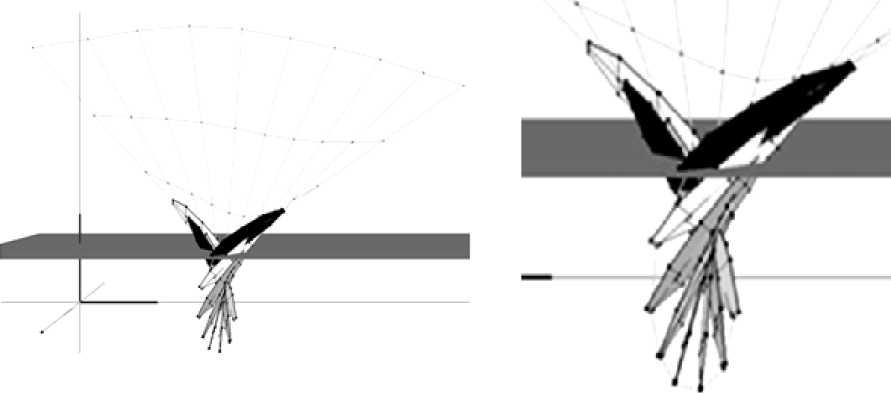
а б
Рис. 6. Пространственная реконструкция движения весла: а – траектория движения цевья; б – подводная траектория движения лопасти
Биомеханические характеристики гребка с изучаемой лопастью:
|
Длительность опорного периода, с |
0,356 |
|
Длительность фазы захвата, с |
0,084 |
|
Длительность фазы подтягивании, с |
0,096 |
|
Длительность фазы отталкивания, с |
0,052 |
|
Длительность фазы извлечения, с |
0,124 |
|
Глубина погружения крайней точки лопасти, мм |
450 |
|
Максимальная скорость погружения крайней точки лопасти, мм/с |
3500 |
|
Отведение лопасти, мм |
400 |
|
Максимальная скорость отведения, мм/с |
2200 |
|
Продольное смещение крайней точки лопасти, мм |
150 |
|
Максимальный угол атаки лопасти в фазе захвата для крайней точки, град |
31 |
Для определения биомеханических характеристик, отражающих особенности спортивной техники, гребок (опорный период) был разбит на фазы в соответствии с общепринятыми в гребном спорте граничными положениями:
-
1) захват – от касания лопастью воды до полного погружения лопасти;
-
2) подтягивание – от полного погружения лопасти до самой низкой точки погружения весла;
-
3) отталкивание – от самой низкой точки погружения весла до начала извлечения лопасти;
-
4) извлечение – от начала извлечения лопасти до отрыва лопасти от воды.
Пространственная реконструкция позволила с высокой точностью определить временные, пространственные и пространственно-временные характеристики гребка.
Описанный скрупулезный подход «ручного вычисления» целесообразен для ученых применительно к разовому исследованию, но совсем неприемлем для массовых наблюдений за изменением техники водных локомоций или сравнительных обследований. Для оперативной обработки информации было разработано компьютерное приложение, позволяющее не только ускорить процесс изучения биомеханики водных локомоций, но и внедрить предложенную методику в тренировочный процесс.
Для автоматизации описанных вычислений и визуализации пространственной реконструкции движения весла в гидродинамической среде было написано специализированное компьютерное приложение Grebok 1.1, разработанное в среде программирования Borland Delphi с использованием открытой графической библиотеки OpenGL [7].
Компьютерное приложение (рис. 7) позволяет определить параметры будущей визуализации реконструируемого гребка: имеется возможность настройки цвета осей, плоскости воды и прочих важных элементов. Также важной функцией является изменение времени паузы между кадрами, что дает впоследствии возможность более детального анализа гребка.
Координаты видимых контрольных точек сохраняются и загружаются в виде текстовых файлов, а программа выполняет расчет пространственной траектории подводной части гребка по одиннадцати точкам.
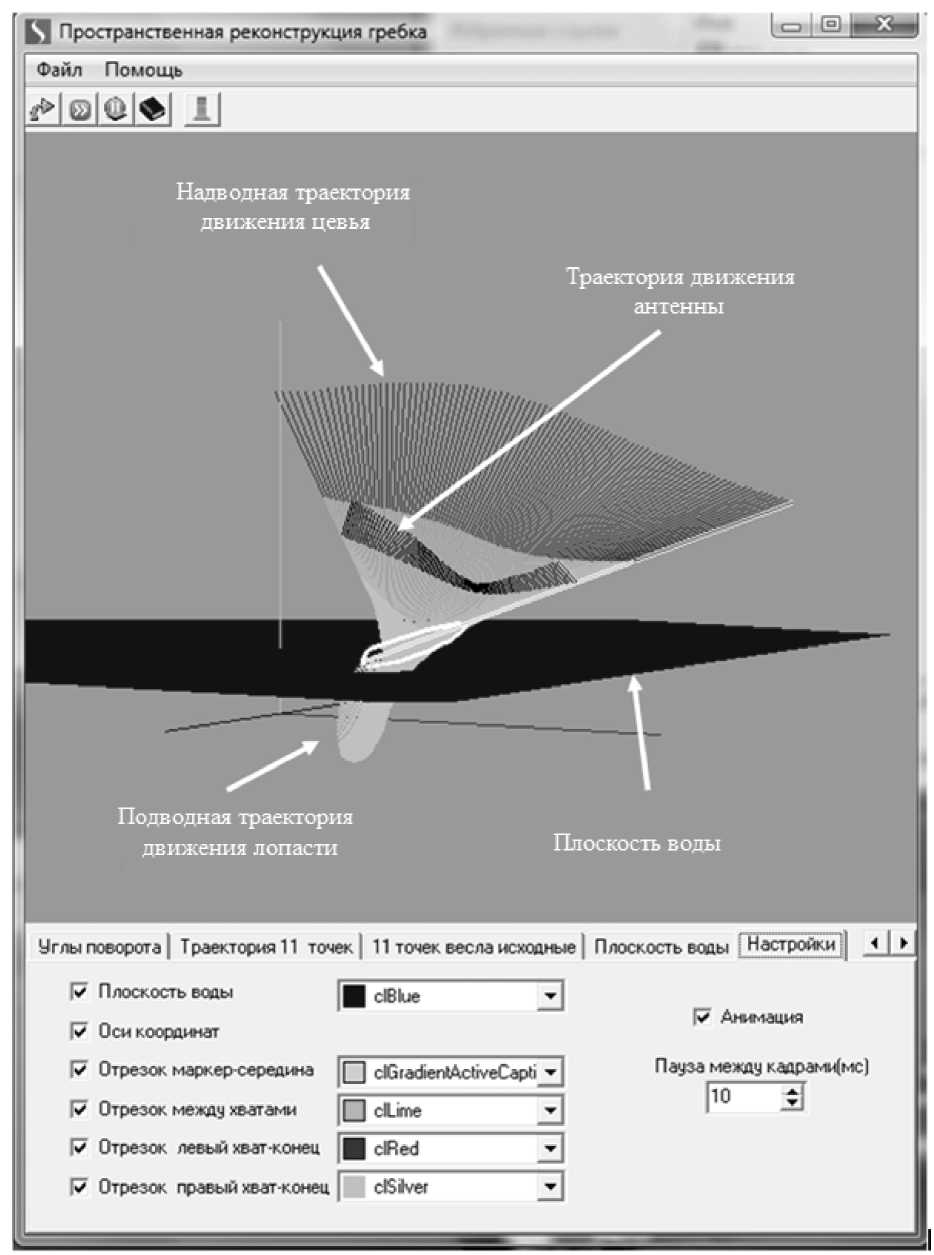
Рис. 7. Интерфейс приложения Grebok 1.1. Отображение реконструкции гребка с панелью инструментов и панелью настройки визуализации
В нижней части рабочей области приложения отображаются исходные и расчетные данные. В программе заложена возможность просмотра гребка с любых ракурсов, а также возможность приближения и удаления реконструкции.
Выводы
-
1. Описанная инновационная технология пространственной реконструкции гребка открывает широкие возможности для познания и осмысления техники выполнения движений. Исследователи получают в свое распоряжение универсальный инструмент для изучения биомеханики гребка, а тренеры – возможность проведения строгого количественного биомеханического анализа вместо качественной визуальной оценки. Точность метода позволяет проводить различные сравнительные исследования техники на современном научном уровне, например:
– сравнивать пространственную структуру гребка нескольких спортсменов и выявлять отличительные признаки;
– проводить долгосрочные исследования техники отдельного спортсмена в различных структурных образованиях годичного тренировочного цикла;
– фундаментальные законы гидродинамики и строгость алгоритма позволяют значительно продвинуться в вопросе поиска оптимальной техники выполнения гребка с учетом индивидуальных особенностей спортсмена и параметров конкретной модели весла;
– пространственная реконструкция будет востребована при анализе синхронности гребли в командных лодках: трехмерные модели гребков всех членов экипажа и сравнение подводной траектории позволят определить степень сходства и различия в технике.
-
2. Представленная методика неоспоримо имеет также методическое значение при обучении гребле. Данный алгоритм и минимальные знания компьютера позволят любому тренеру смоделировать такой пространственный гребок, какой он считает наиболее правильным и к которому должен стремиться его воспитанник. Демонстрация «эталонного» гребка спортсмену, а также визуальное и количественное сопоставление его с реальным гребком будут являться эффективным средством срочной информации и коррекции техники.
-
3. Выявленные и реконструированные пространственные координаты движения лопасти являются основой для дальнейшего изучения гребка, так как позволяют определить не только линейные и угловые кинематические характеристики, но и в дальнейшем – динамические параметры (давление воды на различных участках лопасти, возникающие гидродинамические силы и их проекции на ход лодки).
Список литературы Биомеханический анализ водных локомоций на основе методики пространственной реконструкции гребка
- Гребок [Электронный ресурс]//Википедия. -URL: http://ru.wikipedia.org/?oldid=49857862.
- Иссурин В.Б. Биомеханика гребли на байдарках и каноэ/под ред. В.М. Зациорского. -М.: Физкультура и спорт, 1986. -112 с.
- Иссурин В.Б., Костюк Ю.И. Оптимизация пространственного построения гребка при плавании//Теория и практика физической культуры. -1984. -№ 4. -С. 10-12.
- Краснов Е.А. Биомеханика гребка, поступательного движения лодки и оценка техники движений в гребле на байдарках: автореф. дис.. канд. пед. наук/Всерос. науч.-исслед. ин-т физ. культуры и спорта. -М., 1982. -16 с.
- Краснов Е.А., Химич О.К. Некоторые вопросы техники гребли на байдарках и каноэ//Гребной спорт: Ежегодник. -М.: Физкультура и спорт, 1986. -С. 31-34.
- Леонардо да Винчи. Избранные естественно-научные произведения/ред., пер. ст. и комментарии В.П. Зубова. -М.: Изд-во Акад. наук СССР, 1955. -1030 с.
- Померанцев А.А. Компьютерное моделирование взаимодействия биомеханической гребной системы (БГС) со средой/ред.-сост. В.Б. Коренберг; Моск. гос. акад. физ. культуры. -Малаховка, 2004. -Т. VI. -С. 360-367.
