Биомеханическое моделирование эффекта сближения фрагментов твердого неба при ортопедическом лечении

Автор: Лохов В.А., Долганова О.Ю., Няшин Ю.И.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 1 (55) т.16, 2012 года.
Бесплатный доступ
В работе предлагается рассматривать задачу о лечении врожденной расщелины твердого неба как задачу управления ростовыми деформациями и применять для её решения методы механики сплошной среды. Проведен биомеханический анализ напряженно-деформированного состояния фрагмента растущего твердого неба, где ростовые деформации моделируются с помощью модели Хсю (Journal of Biomechanics, 1968). На основе анализа дается количественное объяснение эффекта сближения фрагментов твердого неба при действии зубодесневой пластины и делается вывод о возможности применения теории управления напряжениями и деформациями посредством собственных деформаций к решению задачи о низведении фрагментов твердого неба.
Расщелина твердого неба, управление, ортодонтическое лечение, ростовая деформация
Короткий адрес: https://sciup.org/146216052
IDR: 146216052 | УДК: 531/534:
Текст научной статьи Биомеханическое моделирование эффекта сближения фрагментов твердого неба при ортопедическом лечении
Врожденная расщелина верхней челюсти («волчья пасть», uranoschisis, labium leporium ) является наиболее часто встречающимся и серьезным заболеванием зубочелюстной системы. Оно нарушает анатомическое соотношение всех тканевых структур среднего отдела лица, изменяет физиологическое равновесие мышц приротовой полости, поражает жизненно важные функции, такие как сосание, глотание, дыхание, речь, а также производит выраженный косметический эффект. По данным Всемирной организации здравоохранения, в мире частота рождения детей с данной патологией составляет в среднем 0,5–1,5 на 1000 новорожденных. Ввиду ухудшения экологии наблюдается тенденция к увеличению количества детей с этим заболеванием [1].
Важную роль в устранении расщелины играет раннее ортопедическое лечение. Оно нацелено на сближение разобщенных фрагментов твердого неба без хирургического вмешательства. Чем успешнее будет проведено ортопедическое лечение, тем ближе будут низведены фрагменты и тем безопаснее будет проведение операции по их сшиванию. Поэтому использование биомеханического анализа позволит лучше понять процессы, происходящие при лечении, и предложить новые более эффективные ортопедические устройства.
Один из методов ортопедической коррекции разработан в Республиканском научно-практическом центре медико-социальной реабилитации детей и подростков с врожденной челюстно-лицевой патологией «Бонум» (г. Екатеринбург) и применяется с 1989 г.
Няшин Юрий Иванович, д.т.н., профессор, завкафедрой теоретической механики, Пермь
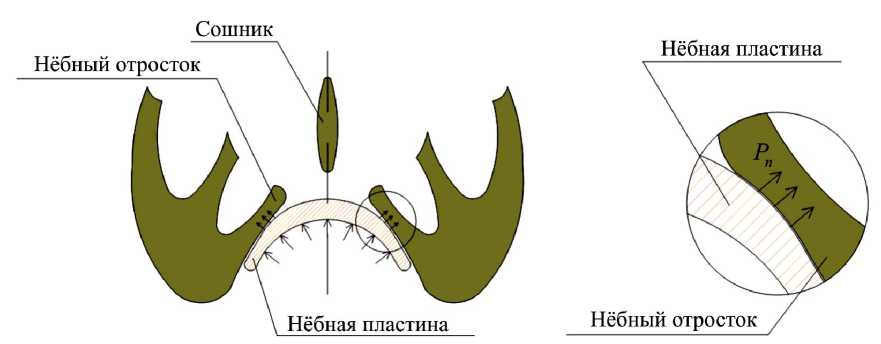
Рис. 1. Схема устройства нёбной пластины
Данный подход к лечению этой категории больных заключается в разработке метода ранней предоперационной реконструктивно-коррекционной терапии, для проведения которой используется индивидуально изготавливаемая ортопедическая аппаратура (ортопедическая пластина), создающая оптимальные условия для процессов роста и развития фрагментированных отделов верхней челюсти [11, 12].
Схема установки аппарата приведена на рис. 1.
Контактное давление Pn , возникающее между пластиной и фрагментом нёба, создается языком (на рисунке не показан), поскольку при кормлении он рефлекторно прижимается к нёбу. В результате формируется физиологический для данного пациента свод нёба, расщелина уменьшается, что приближает сроки проведения операции уранопластики [11].
С точки зрения механики, эффект сближения недоразвитых фрагментов твердого нёба кажется неясным: действие языка приводит, на первый взгляд, к изгибающему моменту во фрагментах, что, казалось бы, должно вызвать дальнейшее расхождение фрагментов. В данной статье приводится объяснение эффекта сближения, т.е. объяснение механизма управления ростом нёбных фрагментов на основании гипотезы о ростовых деформациях.
Биомеханическая модель роста
Одной из первых работ, посвященных моделированию роста с позиций биомеханики, была работа [10]. После этого более детально вопросы роста изучены в исследованиях [2–4, 6, 9, 14]. В работах [3, 9] предложена модель растущего тела как трехфазной среды, содержащей твердый матрикс, внутриклеточную жидкость и межклеточную жидкость (интерстиций). Рост происходит за счет массообмена между твердой фазой и внутриклеточной жидкостью. К сожалению, в данное время использование такой модели затруднительно, так как многие параметры, описывающие процессы транспорта и массопередачи, не определены.
Деформации роста, вообще говоря, конечны, особенно если речь идет о процессах роста целых органов (например, рост сердца цыпленка [14]), и необходимо рассматривать деформации скорости для полной, упругой и ростовой деформаций соответственно:
5=5 е +5 g . (1)
Однако для моделирования сближения фрагментов твердого нёба достаточно рассмотреть малые деформации, тогда тензор | e может быть вычислен через закон
Гука следующим образом:
Ie = d ( C-1 --G) , dt
где C 1 - тензор упругой податливости.
По данным исследований, ростовые процессы существенно зависят от напряжений, действующих в ткани, и одним из простых вариантов модели для деформации скорости роста является модель Хсю [10]:
I g = А + В .-G , (3)
X
где А , В – тензоры, определяющие рост живой ткани.
X
Построение тензоров А и В требует глубокого теоретического и экспериментального исследования. Если принять гипотезу об изотропии материала и роста, то в этом случае тензоры должны быть изотропными, и компоненты тензоров не должны зависеть от поворота или отражения координатных осей, что позволит упростить соотношение (3).
Известно [5], что среди тензоров второго ранга существует только один линейно-независимый изотропный тензор
Aj = AS j , где 5j - символ Кронекера.
Среди тензоров четвертого ранга можно выделить три линейно-независимых изотропных тензора [5]
-5. 5Н, = 5,5 , ±5,5 ,, (5)
ijkl ij kl , ijkl ik jl il jk , поэтому запишем тензор В в следующем виде:
В»I = X 5„5„ + Ц (5»5, + 5,5,) + ц (5а5, - 5,5,). (6)
ijkl ij kl ik jl il jk 1 ik jl il jk
Вычислим двойную свертку тензора (6) и тензора напряжений:
X
(В • -G)j = BjklGkl = X 5 jGkk + ц (G j + Gj ) + Ц1 (G j - Gji) ,
BijklGkl = ^5jGkk + 2цО/у , предполагая симметрию тензора напряжений и вводя обозначение gkk = G11 + g22 + G33 = 11 (су) - первый инвариант тензора напряжений.
В результате деформация скорости роста принимает вид
1 g = A5 j+^5 jG kk+ 2ЦС j.
В работе [11] сделана упрощающая гипотеза (коэффициент X положен равным нулю) и соотношение (8) записано в виде
I g = AI + B с .
Эта гипотеза позволила определить константы A и B экспериментально.
К вопросу об управлении ростовыми деформациями
Соотношение (9) показывает, как действующие напряжения могут повлиять на рост: растягивающие напряжения стимулируют рост, а сжимающие – замедляют (при B > 0 ).
Таким образом, задача о лечении врожденной расщелины твердого нёба может быть рассмотрена как задача об управлении ростом, т.е. задача о создании в теле заданной ростовой деформации. Подход к решению таких задач разработан в работах [7, 8, 13] и основан на теореме о декомпозиции собственной деформации на составляющую, свободную от напряжений, и составляющую, свободную от деформаций [13]. Кроме этого, разработан алгоритм независимого управления собственными деформациями, т.е. алгоритм управления, при котором ростовая деформация не будет вызывать макроскопических напряжений.
Под собственной деформацией понимается неупругая деформация любой природы, т.е. деформация 8 является суммой упругой 8 e и собственной 8 * деформаций:
8 = 8 e +8 * . (10)
Предполагается, что собственные деформации 8 * можно найти отдельно, используя соответствующие определяющие соотношения. Например, для температурной деформации такое соотношение имеет вид 8 * = аA T ( а - тензор коэффициентов температурного расширения, A T - изменение температуры, отсчитываемое от состояния, в котором д = 0, 8 = 0, и = 0), для ростовой деформации необходимо использовать соотношение (9).
Применительно к данной задаче разработанный подход позволит найти давление Pn , действующее на фрагмент твердого нёба (рис. 1) и вызывающее рост живой ткани в заданном направлении. Этого можно достичь, решив следующую задачу:
Ф ( P , Н( 8 0 -8 ( P , ) ) • < .. ( 8 0 -8 ( P , ) ) dV ^ inf ( P , ) , (11)
V где 80 - деформация, обеспечивающая заданное сближение фрагментов, 8* (Pn) -ростовая деформация, вызванная давлением Pn .
Отметим, что после снятия ортопедической пластины в небных фрагментах останутся накопленные ростовые деформации. Важно, чтобы они не создавали остаточных напряжений и, как следствие, не вызывали других нежелательных процессов. Поэтому поиск решения задачи (11) ведется в классе собственных деформаций, свободных от напряжений, что позволит сохранить напряжения в растущих фрагментах.
Постановка задачи
В качестве примера рассмотрим собственно эффект сближения фрагментов за счет накопления ростовой деформации при действии давления со стороны ортопедической пластины.
Полная дифференциальная постановка задачи растущего упругого тела, занимающего область V в R3 с границей S , V = V и S , S = S v и S д и Sp (угловая точка (0; 0) не входит в границы S v и S о ), должна включать в себя:
определяющие соотношения (1–3);
уравнения равновесия
V-д = 0, V r е V , t > 0 , (12)
ISSN 1812-5123. Российский журнал биомеханики. 2012. Т. 16, № 1 (55): 38–45 41
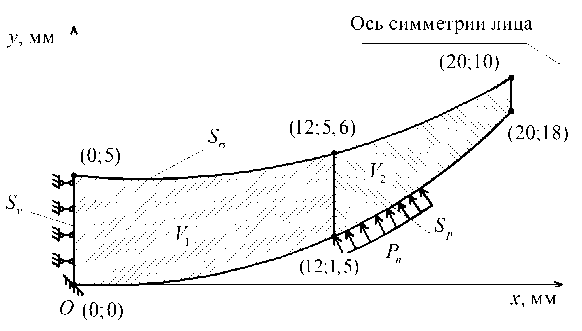
Рис. 2. Плоская модель небного отростка кинематические соотношения
| = 1 (VV + VV), Vr e V, t > 0,(13)
граничные условия
Vx = 0, тxy = 0, Vr e Sv, t > 0,(14)
V = 0 (x = y = 0), t > 0,(15)
V n-5 = 0, VV e S,, n-5 = Pn, Vr e Sp, t > 0,(16)
начальные условия
U = 0, t = 0, Vr e V .(17)
Однако для объяснения эффекта сближения фрагментов достаточно рассмотреть более простую задачу о вычислении напряжений в момент приложения ортопедической нагрузки Pn ( t = 0, в этот момент ростовые деформации равны нулю):
^*
7-5 = 0, VV e V, ст = C--к, Vr e V, s = 1 (VU + uV), Vr e V, (18)
*
n -5 = 0, V r e S^ , n -5 = Pn , V V e Sp , 5 n p
V
U x = 0, T xy = 0, V r e S v , u = 0 ( x = y = 0).
Затем можно вычислить деформации скорости | g в формуле (9). Этот анализ позволит выявить зоны «ускоренного» и «замедленного» роста и объяснить эффект сближения фрагментов.
Геометрические параметры области находятся в физиологическом диапазоне, их величину можно оценить по координатам точек, которые приведены на рис. 2.
Свойства материала ткани ( E = 104 МПа, ц = 0,3 ) фрагмента взяты из работы [11]. Известно, что фрагмент твердого нёба состоит из двух частей: податливой хрящевой ткани (область V 2 ), соединенной с более жесткой костной структурой (область V 1 ) [12].
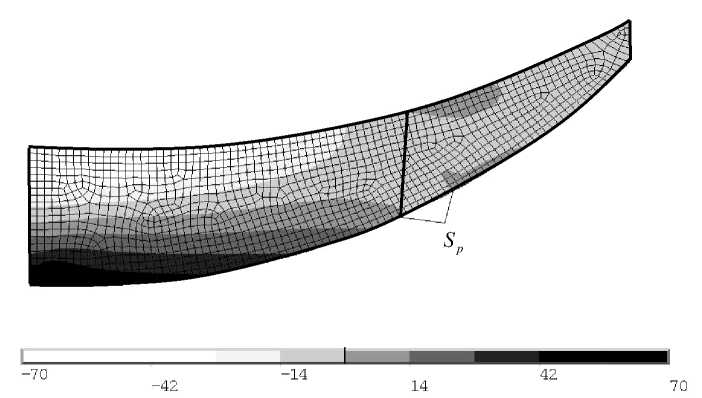
Рис. 3. Распределение напряжений о x (г / мм2) в расчетной области
Поэтому в определяющем соотношении для ростовой деформации в области V 1 ,
~ ,_ ~ которое применяется в виде формулы ^ g = А + В --о , V r е V 1 , компонентами тензора В пренебрегаем. В области V 2 , где напряжения вызывают заметную реакцию ткани, параметры ростовой деформации имеют следующие значения: А = 0,0025 (1/мес) , В = 0,002 (мм2/(г - мес)) [11].
Наличие ортопедической пластины моделируем граничными условиями (16). Давление, создаваемое ортопедической пластиной, мало и может повлиять лишь на податливую структуру, поэтому в расчете нагрузку Pn прикладываем только к области V 2 . Величина P n = 10 г /мм2 выбрана исходя из условия невозникновения травм слизистой оболочки и костной ткани твердого неба. Длина границы Sp (длина области контакта) взята из работы [11].
Анализ решения
Скорость ростовой деформации, приводящей к сближению отростков, примет вид
^ = А + В оп. (19)
Для объяснения эффекта сближения рассмотрим скорости ростовых деформаций (19), возникающих в области, представленной на рис. 2, от действия ортопедической пластины. В конечно-элементном пакете ANSYS разобьем указанную область плоскими элементами, средняя длина ребра которых равна 0,25 мм. Найдем распределение напряжений о x в области V , при нагружении ее границы Sp давлением P n = 10 г /мм2 . Распределение напряжений о x приведено на рис. 3. Область приложения нагрузки (начало и конец границы Sp ) также показана на рисунке.
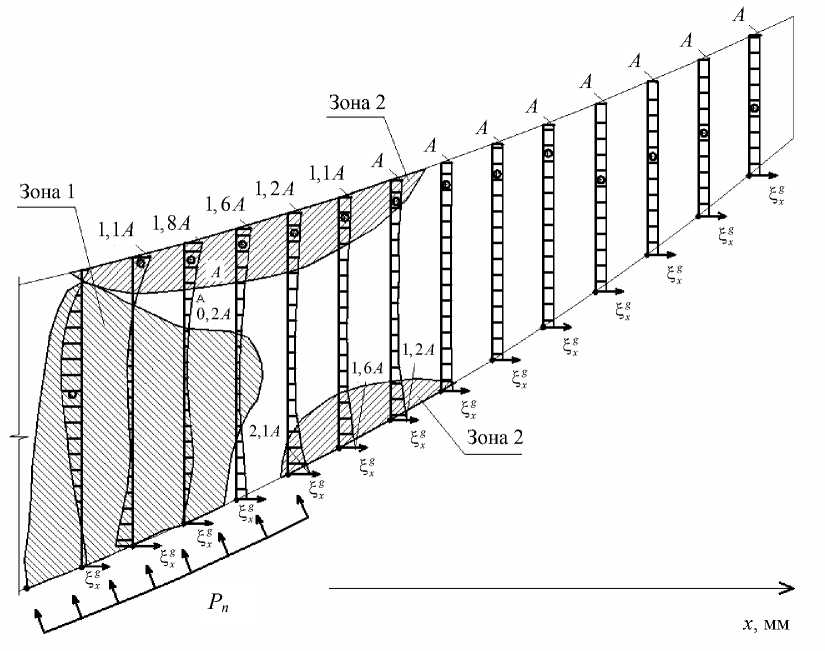
Обозначим вдоль нижней границы области V 2 точки 1, 2… n с шагом 1 мм. Проведем из каждой указанной точки прямую к верхней границе области. На рис. 4 приведены эпюры скоростей ростовых деформаций ^ g фрагмента вдоль указанных линий для области V 2 .
Для оценки полученных результатов обозначим на фрагменте «зоны роста»: «зону 1» , где ^ g < 0,2 A = 0,0005 (1 / мес) , и «зону 2», где ^ g > A = 0,0025 (1 / мес) .
ISSN 1812-5123. Российский журнал биомеханики. 2012. Т. 16, № 1 (55): 38–45 43
A
A
A
0,2 A
1,2 A
1,6 A
2,1A g x g x g x g x
g
x
g
x
g
x
A g x g x g x g x
A
g
x
Зона 2
A
P n
Зона 2
Зона 1
1,1 A A
1,2 A ,
1,6 A ,
A
A g x g x x, мм
Рис. 4. Эпюры скоростей ростовых деформаций ξ x g , (1/ мес) в области V 2
Оценим полученные результаты. В области контакта под действием ортопедической пластины возникают сжимающие напряжения (см. рис. 3), которые подавляют рост «нижних» волокон материала – рост в направлении оси Ох в этой области замедляется («зона 1»). В областях, где возникают растягивающие напряжения, наблюдается ускоренный рост волокон – «зоны 2». В области контакта рост «верхних» волокон опережает рост «нижних». Вследствие этого возникает изгиб фрагмента в направлении роста, что объясняет феномен сближения фрагментов с позиций теории ростовых деформаций.
Отметим, что давление Pn и область контакта (граница Sp ) должны подбираться индивидуально для каждого пациента. Расчеты показывают, например, что при увеличении зоны действия нагрузки Pn фрагменты будут расходиться [11]. Ключевую роль в поиске оптимального давления должен играть биомеханический анализ пациента, основанный на гипсовых контрольно-диагностических моделях или магнитно-резонансной томографии. В результате анализа должны быть даны рекомендации по выбору нужной формы ортопедической пластины.
Заключение
В данной статье показано, что благоприятное поле напряжений может вызывать рост живой ткани в заданном направлении. С точки зрения механики, задача об ортопедическом лечении видится как задача управления ростовыми деформациями. Теоретические основы решения таких задач разработаны авторами [7, 8, 13] и могут эффективно применяться для разработки оптимальной методики ортопедического лечения врожденной расщелины твердого нёба. Применение математического моделирования и компьютерной симуляции позволит предсказать исход ортопедического лечения и провести «виртуальное лечение». Это важно как для лечащего врача, так и для психологической поддержки родителей ребенка.
Благодарности
Работа поддержана Российским фондом фундаментальных исследований (проект № 11-01-00910).
Список литературы Биомеханическое моделирование эффекта сближения фрагментов твердого неба при ортопедическом лечении
- Бессонов С.Н. Хирургическое лечение деформаций носа при врожденных двусторонних расщелинах верхней губы (обзор)//Российская ринология. -2005. -№ 3. -С. 43-47.
- Григорян С.С., Регирер С.А. Биомеханика и некоторые общие вопросы биологии//Биомеханика: проблемы и исследования. -Рига: Зинатне, 1988. -С. 233-245.
- Кизилова Н.Н., Логвенков С.А., Штейн А.А. Математическое моделирование транспортно-ростовых процессов в многофазных биологических сплошных средах//Изв. РАН. МЖГ. -2012. -№ 1. -С. 3-13.
- Логвенков С.А., Штейн А.А. Управление биологическим ростом как задача механики//Российский журнал биомеханики. -2006. -Т. 10, № 2. -С. 9-19.
- Лурье А.И. Нелинейная теория упругости. -М.: Наука, 1980. -512 с.
- Регирер С.А., Штейн А.А. Методы механики сплошной среды в применении к задачам роста и развития биологических тканей//Современные проблемы биомеханики. -Рига: Зинатне, 1985. -Т. 2. -С. 5-37.
- Туктамышев В.С., Лохов В.А. Метод независимого управления механическими напряжениями в деформируемых системах//Механика композиционных материалов и конструкций. -2008. -Т. 14, № 2. -С. 269-281.
- Туктамышев В.С., Лохов В.А., Няшин Ю.И. Независимое управление напряжениями и деформациями в растущих живых тканях//Российский журнал биомеханики. -2011. -Т. 15, № 2 (52). -С. 69-76.
- Штейн А.А., Юдина Е.Н. Математическая модель растущей растительной ткани как трехфазной деформируемой среды//Российский журнал биомеханики. -2011. -Т. 15, № 1 (51). -С. 42-51.
- Hsu F.-H. The influences of mechanical loads on the form of a growing elastic body//Journal of Biomechanics. -1968. -Vol. 1, No. 4. -P. 303-311.
- Masich A.G., Nyashin Y.I. Mathematical modelling of orthopedic reconstruction of childrens congenital maxillary anomaly//Russian Journal of Biomechanics. -1999. -Vol. 3, No. 1. -P. 101-109.
- Masich A.G., Chernopazov S.A., Simanovskaya E.Yu., Nyashin Yu.I., Dolgopolova G.V. The role of mechanical factor in orthopedic treatment of congenital palate cleft in children//Russian Journal of Biomechanics. -2000. -Vol. 4, No. 1. -P. 33-42.
- Nyashin Y., Lokhov V., Ziegler F. Decomposition method in linear elastic problems with eigenstrain//ZAMM (Z. Angew. Math. Mech.). -2005. -Vol. 85, No. 8. -P. 557-570.
- Taber L.A. Biomechanics of growth, remodeling, and morphogenesis//Appl. Mech. Rev. -1995. -Vol. 48. -P. 487-545.
