Биомеханическое моделирование трабекулярной костной ткани в состоянии равновесия

Автор: Чикова Т.Н., Киченко А.А., Тверье В.М., Няшин Ю.И.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 3 (81) т.22, 2018 года.
Бесплатный доступ
В XXI веке J. Wolff отметил, что кость здорового человека или животного адаптируется к тем нагрузкам, которым подвергается. На уровне ткани в кости просматриваются слабопористые участки компактного вещества и сильнопористые - трабекулярного (губчатого). Известно, что в трабекулярной костной ткани механизм адаптации реализуется посредством выстраивания трабекул (костных балочек, образующих твердый матрикс) вдоль линии действия преобладающей нагрузки. При достижении трабекулярной тканью оптимальной структуры для существующего в локальной области нагружения кость переходит в состояние равновесия (гомеостаза). В своих работах S. Cowin предложил описывать положение трабекул в каждый дискретный момент времени главными направлениями тензора структуры, отыскиваемыми из решения системы кинетических уравнений. На основе предложенных соотношений авторами решены многие задачи динамики трабекулярной костной ткани, результатом которых являются функции некоторой величины, зависящей от времени. Например, рассмотрено изменение пористости, компоненты девиатора тензора структуры. В данной работе кинетические уравнения используются с целью определения структуры, напряженного состояния или упругих свойств костного образца, находящегося в состоянии равновесия. Математическая постановка представлена задачей теории упругости анизотропного тела. Все численные расчеты выполнены с использованием программного продукта ANSYS Mechanical APDL на примере растяжения прямоугольной пластины. Проведено сравнение результатов задачи, полученных аналитическим методом и методом конечных элементов. Предполагается, что полученные соотношения могут быть полезны для определения реализуемого в кости известной структуры напряженно-деформированного состояния или, наоборот, для предсказания оптимальной структуры кости при заданных условиях нагружения.
Трабекулярная (губчатая) костная ткань, тензор структуры, равновесие (гомеостаз), краевые задачи биомеханики
Короткий адрес: https://sciup.org/146282095
IDR: 146282095 | УДК: 531/534: | DOI: 10.15593/RZhBiomeh/2018.3.01
Biomechanical modelling of trabecular bone tissue in remodelling equilibrium
In the 19th century, J. Wolff noted that the bone of a healthy person or animal adapts to the loads under which it is placed. At the tissue level, weakly porous regions of compact tissue and strongly porous regions of the cancellous (spongy) tissue are seen in the bone. It is known that in the cancellous bone tissue the adaptation mechanism is realized by aligning the trabeculae (bone bunches forming a solid matrix) along the principal stress trajectories. When the cancellous tissue reaches the optimal structure for the existing loading in the local area, the bone passes into a state of equilibrium (homeostasis). In his works, S. Cowin proposed to describe the position of the trabeculae at each discrete instant of time by the principal trajectories of the fabric tensor calculated from the solution of the system of rate equations. On the basis of the proposed relationships, many problems of the dynamics of cancellous bone tissue are solved, the results of which are functions of a certain quantity that depends on time. For example, the change in porosity, the components of the deviator of the fabric tensor. In this work, rate equations are used to determine the structure, stress state or elastic properties of a bone sample in equilibrium. The mathematical statement is presented by the anisotropic elasticity problem. All numerical calculations were performed using the ANSYS Mechanical APDL software on example of a rectangular plate tension. The results of the problem obtained by the analytical approach and the finite element method are compared. It is assumed that the obtained relationships can be useful for predicting of the stress-strain state in the bone of known structure, or vice versa, to predict the optimal bone structure for the given loading conditions.
Текст научной статьи Биомеханическое моделирование трабекулярной костной ткани в состоянии равновесия
Рассмотрим стационарную задачу о плоской деформации образца из трабекулярной костной ткани как задачу линейной теории упругости анизотропного тела, дополненную кинетическими уравнениями, описывающими перестройку костной ткани. Математическая постановка задачи состоит из 21 скалярного уравнения [3]:
Пермь
Няшин Юрий Иванович, д.т.н., профессор кафедры теоретической механики и биомеханики, Пермь уравнения равновесия:
-
V- 6 = 0, x e V, t > 0,(1)
определяющего и геометрического соотношений:
<6 = (gi + g2e) (tr ё)1Ё + (gз + g4e)£ + g5 (ie - K + K - £) + g6 (tr (K - e)1E + (tr e)K),
~ 1 —- -^
£ = — (V u + u V ) , эволюционного уравнения, описывающего изменение ориентации трабекул в рассматриваемой области:
К = (h + he)(£-£0) + h tr(e-£0)K +
+ h ^ ( tr( K - (£ - £0 )) ) E - 3 ( K - (£ - £0 ) + (£ - £0) - K ) ) , эволюционного уравнения, описывающего изменение плотности губчатой костной ткани в рассматриваемой области:
e = (fi + f2 e) (tr £ - tr £0) + f3 (tr(K - (£ - £0)) ), граничных условий:
n - 6 = P(t), x = S^, t > 0, u - U(t), x = Su, t > 0, начальных условий:
IK = K0, e = e0, x e V, t = 0,(6)
P = P0, x e SCT, U = U0, x e Su, t = 0, где f -f, h -h - константы [3, 4], сут”1; gY -g - константы [8, 9], ГПа; К - девиатор тензора структуры (отвечает за направление трабекул); e – изменение доли твердого объема (отвечает за пористость).
Интересно посмотреть на поведение трабекулярной костной ткани под нагрузкой в момент времени, когда ее структура находится в состоянии равновесия. Для примера кость моделируется как прямоугольная пластина, нагруженная с одного торца растягивающей нагрузкой, а с другого конца пластина жестко закреплена (рис. 1).
Рис. 1. Схематичное представление модели
В зависимости от того, какие данные заданы и какие нужно найти, можно выделить три типа задач:
-
1. Даны K 0 , P 0, e 0, найти d0, E0 .
-
2. Даны d0, E0 , найти K0, e0 .
-
3. Даны K 0 = 0, i , j = i...3 (изотропия), d0, E0 , найти E , v .
Решение стационарных задач
Определение напряженно-деформированного состояния
Решение первой задачи является ответом на вопрос: какое напряженно-деформированное состояние реализуется в кости определенной микроструктуры под заданной нагрузкой?
Определяющее соотношение (2.1) представляет собой форму записи обобщенного
^
закона Гука су = C •• e , в котором тензор упругих констант является симметричным тензором четвертого ранга, зависящим от структуры материала следующим образом (используется нотация Фойгта):
C ii = ( g i + g 2 e) + ( g 3 + g 4 e) + 2 K n ( g 5 + g 6 ), C 12 = ( g i + g 2 e ) + g 6( K ii + K 22 ) , C = ( g i + g 2 e ) — g 6 K 22 , C 14 = K 23 g 6 , C 15 = K 13( g 5 + g б ), C i6 = K i2 ( g 5 + g 6 ),
C 22 = ( g i + g 2 e ) + ( g 3 + g 4 e ) + 2 K 22 ( g 5 + g 6 ), C 23 = ( g i + g 2 e ) — g 6 K ii ,
C 24 = K 23 ( g 5 + g 6 ), C 25 = K i3 g 6 , C 26 = K i2 ( g 5 + g 6 ),
C33 = ( g i + g 2 e ) + ( g 3 + g 4 e ) — 2( K ii + K 22)( g 5 + g 6 ), C 34 = K 23 ( g 5 + g 6 ) ,
C 35 = K 23 ( g 5 + g 6 ), C 36 = K i2 g 6 , C 44 = 2 (( g 3 + g 4 e ) - g 5 K ii ),
C 44 = "2"(( g 3 + g 4 e ) — g 5 K ii ), C 45 = "2 K i2 g 5 , C 46 = 2 K i3 g 5 , C 46 = 2 K i3 g 5 , C 55 = 2(( g 3 + g 4 e ) - g 5 K 22 ), C 56 = "2 K 23 g 5 , C 66 = "2" (( g 3 + g 4 e ) + g 5( K ii + K 22 )).
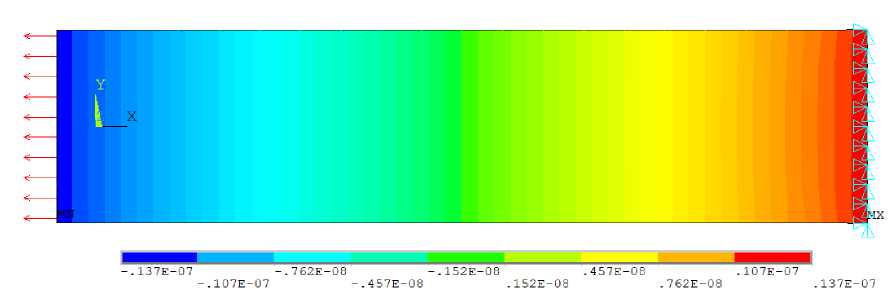
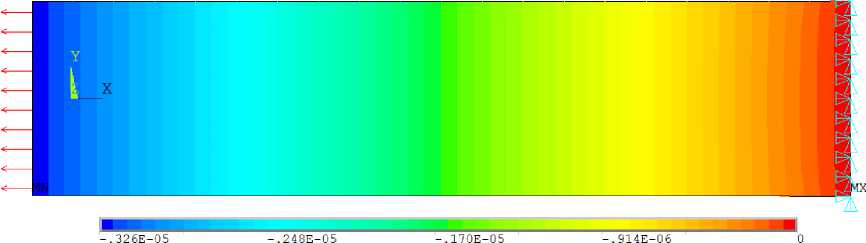
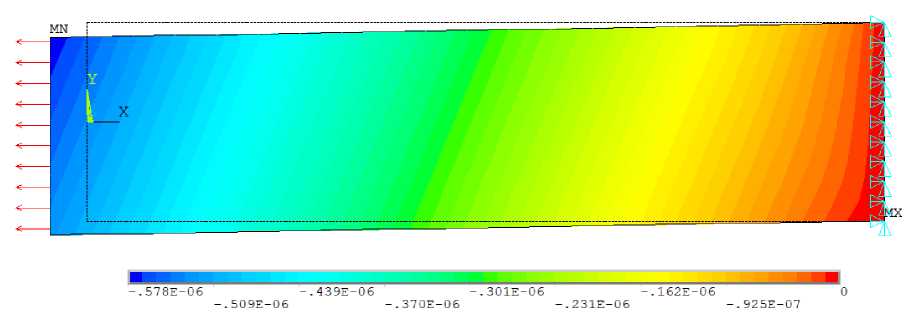
В ANSYS уравнения (7) записываются в таблицу свойств материала командой TBDATA . Напряженно-деформированное состояние определяется в результате решения задачи методом конечных элементов с учетом внешних сил и ограничений на перемещения (рис. 2).
Для решения задачи в ANSYS используем конечный элемент Plane182 .
Аналитическое решение задачи требует индивидуального подхода к получению тензоров напряжений и деформации. Решение задачи на рис. 1 аналитическим методом можно получить, сделав следующие предположения.
Допустим, что реализуется плоское напряженное состояние
( Gz ~ Txz ~ Tyz * 0; Yxz ~ Yjz ~ 0 ). Тогда благодаря принципу Сен-Венана можно заменить влияние заделки неким напряжением ох , действующим на поперечное сечение A = b (см. рис 1). Из уравнения равновесия для оси x (о^ b - P = 0) находится gx = P / b .
Так как касательные и нормальные напряжения, действующие на площадках, перпендикулярных оси у , отсутствуют, то оу * 0, тху * 0.
/\ PRNSOL Command X
File
|
NODE |
SX |
SY |
SZ |
SXY |
SYZ |
SXZ |
|
7 |
0.10003E4J06 |
7.3651 |
0.0000 |
-2.4388 |
0.0000 |
0.0000 |
|
21 |
□ .100ОЗЕЧ106 |
7.3651 |
0.0000 |
2.4388 |
0.0000 |
0.0000 |
|
41 |
99996. |
9.3095 |
0.0000 |
-3.3817 |
0.0000 |
0.0000 |
|
42 |
99983. |
14.613 |
0.0000 |
0.16555E-007 |
0.0000 |
0.0000 |
|
43 |
99996. |
9.3095 |
0.0000 |
3.3817 |
0.0000 |
0.0000 |
/\ PRNSOL Command X
File
|
NODE |
EPaX EPELY EPELZ EPELXY |
EPELVZ |
EPELXZ |
A |
|
7 |
0.16108E-D03-0.27D29E-D04-0.27D43E-D04-0.91734E-D08 |
0.0000 |
0.0000 |
|
|
21 |
0.161D8E-D03-0.27D29E-004-0.27D43E-D04 0.91734E-DD8 |
0.0000 |
0.0000 |
|
|
41 |
D.161D3E-DD3-0.27D17E-D04-0.27035E-D04-0.1272DE-D07 |
0.0000 |
0.0000 |
|
|
42 |
0.16101E-003-0.27005E-D04-0.27033E-D04 0.16368E-015 |
0.0000 |
0.0000 |
|
|
43 |
0.16103E-003-0.27017E-004-0.27035E-004 0.12720E-007 |
0.0000 |
0.0000 |
V |
Рис. 2. Компоненты тензора напряжений и деформации для сечения x ® l /2 в ANSYS
Оставшиеся 4 неизвестных ( ε , ε , ε , γ ) находятся из четырех уравнений закона
Гука
° x = C n£ x + С 12е y + C 13 & z , ° y = С 12е x + C 22е y + C 23е z , 0 = C 13 ^ x + C 32 ^ y + C 33 ^ z ,
T xy = C 66е xy .
Тогда
ε z
° x ( C 3 C 22 - C 13 C 2 C 23 )
3 2 22 ,
13 22 + ^ ^13 12 23 ^11 23 13 ^12 33 13 + 11 33 13 22
С С
12 33
y
13 22
-
-
С СС
13 23
-------е , е —е zxy
C12C23
С
- —ez, е = 0.
z xy
C 13
Тот же результат получается из четырех уравнений, записанных через матрицу податливости,
е x ° x ■ C 11 , е y ° y ■ C 21 , ° z ■ C 31 , T xy 0.
С учетом (1) и (2.1), а также зная, что компоненты тензора K равны нулю при P = 1 кН (°х = 10 000 Па), получаются следующие значения:
е = 0,16104 - 10 - 4, е = е - 0,27034 - 10 - 5 , y = 0 . x yz xy
Аналитическое решение (11) совпадает с численным с точностью А = 10 - 8.
Связь компонент тензора малой формулами Коши:
деформации с перемещениями определяется
ди е = — е xx дx ’ yy
д v д а
—, е = — xx дy дz
.
д
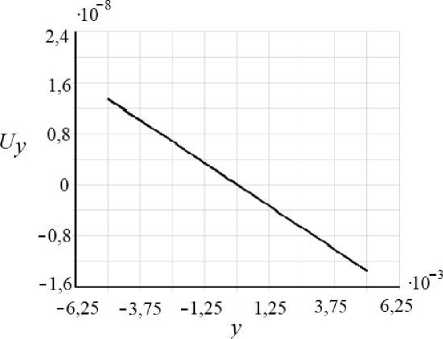
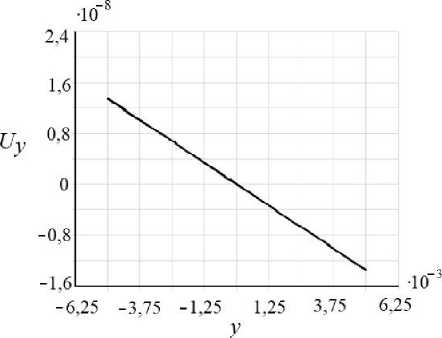
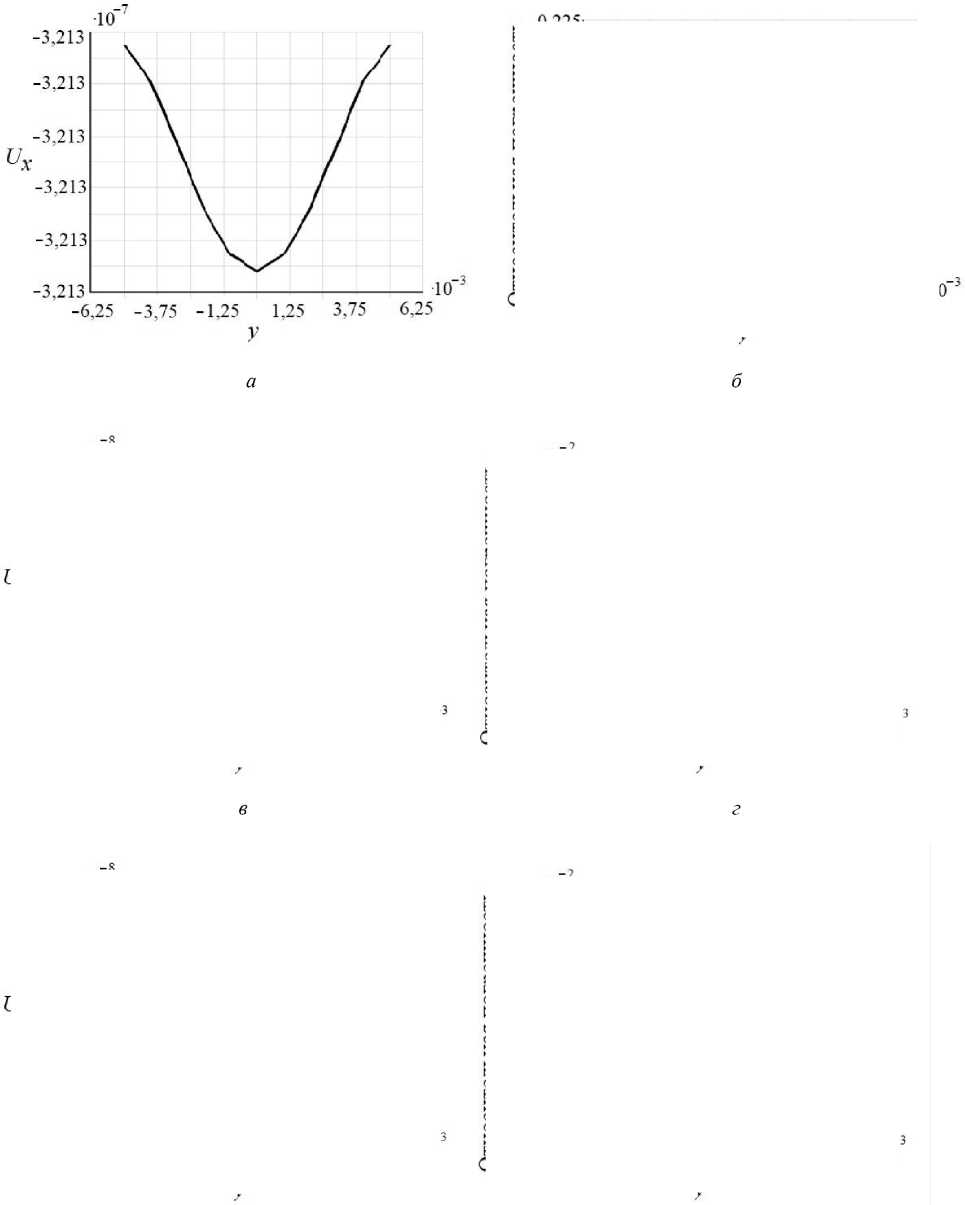
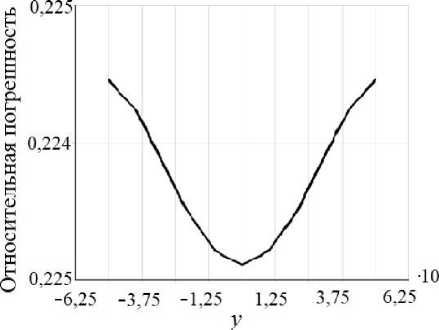
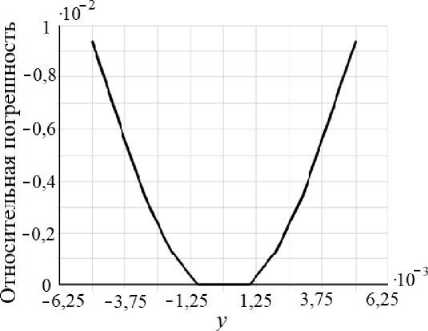
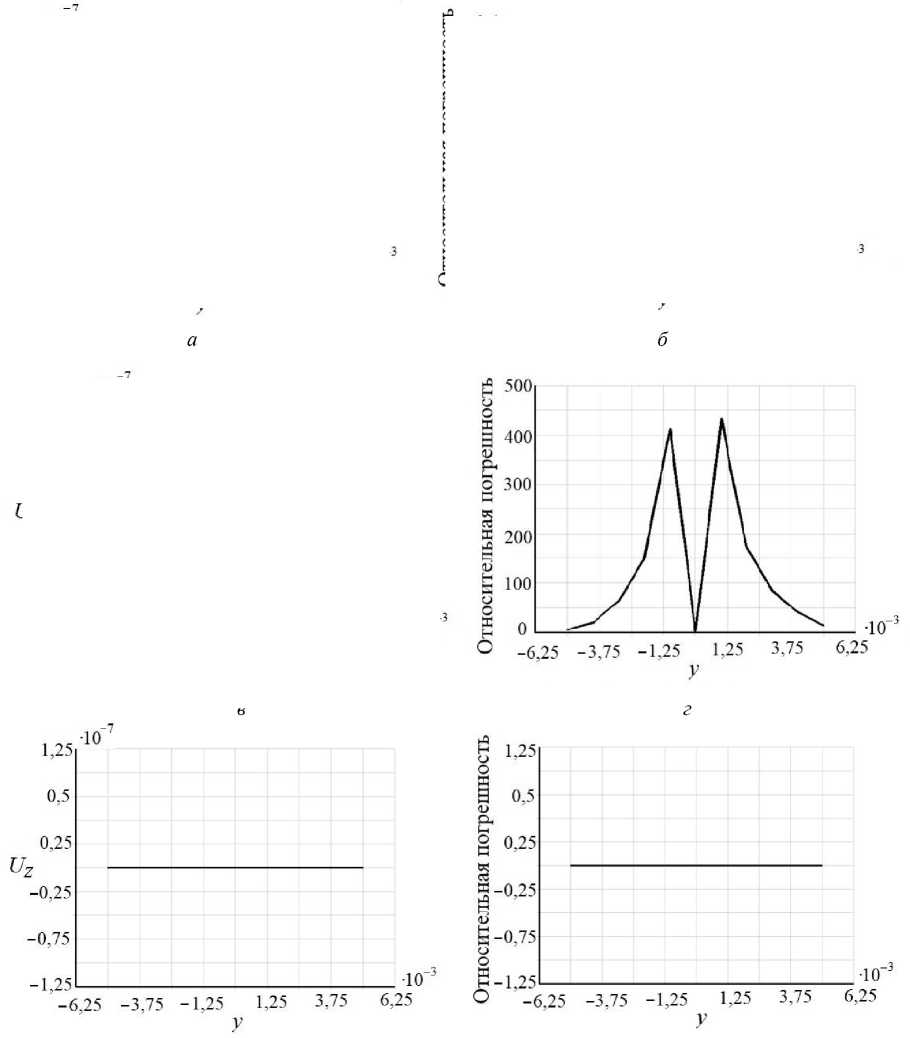
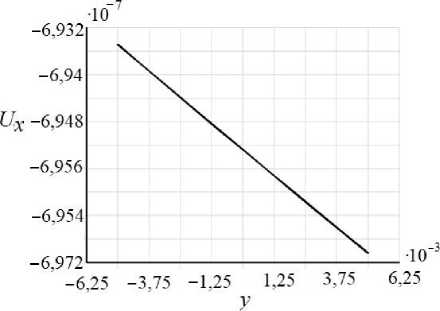
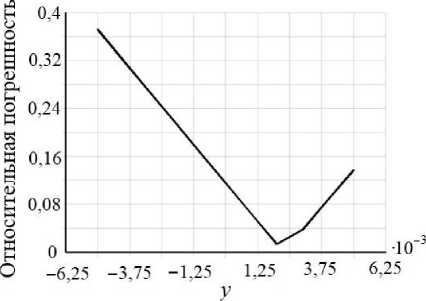
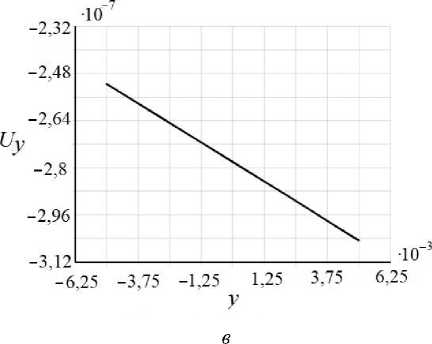
Рис. 3. Осевые перемещения ( а , в , д ) и относительная погрешность ( б , г , е ) численного решения в сечении x « l /2 (м), Кц = 0, i , j = 1..3
е
Определяя перемещения путем интегрирования, получим
U = £xx + Cj, V = £y y + c2 , W = £zz + C3.(13)
Постоянные u ,v ,w определяются из условий закрепления u|x=0 = v|y=0 = wz=0 = 0 ^ cl, c2, C3 = 0 .(14)
Удовлетворяя им, получим u = £ Xx, V = £ уУ, W = £ Zz.(15)
а
-.297E-05 -.209E-05 -.131E-05 -.522E-06
б
в
Рис. 4. Изолинии перемещений по оси x при: а - Ку = 0, i, j = 1...3;
б - K 11 = - 0,09, K 22 = - 0,05, K 33 = 0,14 ; в - K u = - 0,09, K 22 = - 0,05, K 33 = 0,14, а = 64 °
Рассмотрим перемещения в поперечном сечении с координатой x = l /2 (рис. 3). На всех трех графиках относительная погрешность меньше 1%.
Несмотря на то что нагрузка равномерно распределена по краю, x = 0, перемещение балки вдоль этой оси происходит по параболе с максимальным отклонением от прямой линии, на три порядка отличающимся от величины самого перемещения (см. рис. 3, график U ), поэтому на рис. 4, а , б небольшое скругление сечений видно только вблизи заделки.
Рассмотрим контурные графики перемещений при задании различных компонент девиатора тензора структуры, в частности при его повороте на угол α (см. рис. 4, в ).
д
е
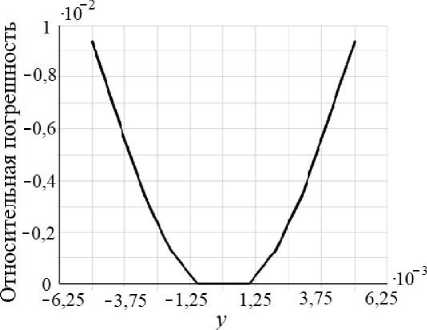
Р ис. 5. Осевые перемещения ( а , в , д ) и относительная погрешность ( б , г , е ) численного решения в сечении x * l /2 (м), K n = - 0,09, K 22 = - 0,05, K 33 = 0,14
Аналитическое решение (15) говорит о том, что в общем случае анизотропии при растяжении стержень не только удлиняется в направлении силы и сокращается в поперечных направлениях, но еще и испытывает сдвиги во всех плоскостях, параллельных координатным [5]. Однако используемые в [5] формулы для деформации и перемещений в случае растяжения анизотропного стержня нельзя применять в данной задаче из-за сделанных изначально предположений (в частности, из-за предположения о плоском напряженном состоянии).
Рассмотрим поперечные сечения при анизотропии ( Ку ^ 0). В качестве аналитического решения используем соотношение (15).
Из графиков на рис. 5 видно, что перемещения U в значительной степени зависят от значений компонент тензора K , поэтому в случае анизотропии соотношение v = 8^ у применять неверно.
Отыскание параметров структуры
Решение второй задачи является ответом на вопрос: какой микроструктурой обладает кость, находящаяся в заданном напряженно-деформированным состоянии?
Исходные данные возьмем из решения предыдущей задачи, а именно значения компонент тензора напряжений и деформации. Требуется доказать, что Ку = 0 при i , j = 1...3 и e = - 0,0179. Для этого определяющее соотношение (2.1) преобразуется в систему
■ л Т
111 г
8 x , 8 y ’ 8 z , 2 8 yz ’ 2 8 xz ’ 2 8 xy f ,
Г t T X I
{ e , K 11 , K 22 , K 23 , K 13 , K 12 } = A - у
|
g 2 tr 8 + g 48 x |
2( g 5 + g 6 )8 x + g 68 y |
g 6 (8 y - 8 z ) |
|
|
g 2 tr 8 + g 48 y |
g 6 (8 x - 8 z ) |
2( g 5 + g 6 )8 y + g 68 x |
|
|
где [ A ] = 6 - 6 |
g 2tr £ + g 48 z g 48 yz |
- 2( g 5 + g 6 )8 z - g 68 y - g 58 yz |
- 2( g 5 + g 6 )8 z - g 68 x 0 |
|
g 48 xz |
0 |
- g 58 xz |
|
|
. g 48 xy |
g 58 xy |
g 58 xy _ |
|
2 g 6 8 yz 2( g 5 + g 6 ) 8 yz 2( g 5 + g 6 ) 8 yz (8 y + 8 z )( g 5 + g 6 ) + g 6 8 x g 5 8 xy _ g 5 8 xz |
2( g 5 + g 6 )8 xz 2( g 5 + g 6 )8 xy 2 g 6 8 xz 2( g 5 + g 6 )8 xy 2( g 5 + g 6 )8 xz 2 g 68 xy g 5 8 xz g 5 8 xy (8 x + 8 z )( g 5 + g 6 ) + g 5 8 xy g 5 8 yz g 5 8 yz (8 x + 8 y )( g 5 + g 6 ) + g 5 8 z _ |
Тогда e = - 0,0179; Ku = 0; K 22 = - 1,3878 - 10 — 17; K 13 = 0; K 23 = - 1,3878 - 10 - 17; K 12 = - 1,3878 - 10 - 17.
Точность решения А = 10 - 16.
Отыскание механических свойств материала
Задание K в определенном виде определяет тип упругой симметрии, реализуемый в материале. Когда Ку = 0, используя физическое соотношение для изотропного тела, можно найти технические константы E , v.
E (1 - v ) Ev Ev (17)
--------------£ +-- £ +-- £ = G , (1 + v )(1 - 2 v ) 11 (1 + v )(1 - 2 v ) yy (1 + v )(1 - 2 v ) zz xx
Ev E (1 - v ) Ev
--------------£ +-- £ +-- £ = G , (1 + v )(1 - 2 v ) xx (1 + v )(1 - 2 v ) yy (1 + v )(1 - 2 v ) zz yy
E
-------£ = T . (1 + v ) xy xy
Тогда модуль Юнга и коэффициент Пуассона находятся по формулам
G„£- xx xyxx xy
, 2g_£ - T (£ + £ + £)
xx xy xy xx yy zz
E = ^ x ^ ( 1 + v ) . ε xy
Заключение
Опираясь на кинетические уравнения феноменологической теории адаптивной упругости, предложенные S. Cowin для описания перестройки архитектуры трабекулярной костной ткани, вызванной выходом локальной деформации кости за пределы lazy zone (диапазон деформаций, внутри которого не происходит изменений в структуре), авторы предложили уравнения, позволяющие анализировать костную ткань (напряженно-деформированное состояние, структуру и пористость, упругие свойства материала) в гомеостазе. Сравнение аналитических решений с результатами расчета в ANSYS показало работоспособность математической модели.
Благодарности
Работа поддержана грантом Российского фонда фундаментальных исследований № 18-01-00589_а.
Список литературы Биомеханическое моделирование трабекулярной костной ткани в состоянии равновесия
- Гороженинова Т.Н., Киченко А.А. Моделирование изгиба анизотропной консольной балки в ANSYS Mechanical // Master's Journal. - 2017. - № 1. - C. 225-229.
- Гороженинова Т.Н., Киченко А.А. Создание интерфейса между ANSYS и MATLAB на примере перестройки трабекулярной костной ткани // Master's Journal. - 2018. - № 1. - С. 225-229.
- Киченко А.А., Тверье В.М., Няшин Ю.И., Осипенко М.А., Лохов В.А. Постановка начально-краевой задачи о перестройке трабекулярной костной ткани // Российский журнал биомеханики. - 2012. - Т. 16, № 4. - С. 36-52.
- Киченко А.А., Тверье В.М., Няшин Ю.И., Осипенко М.А. О приложении теории перестройки трабекулярной костной ткани // Российский журнал биомеханики. - 2012. - Т. 16, № 4. - С. 53-72.
- Лехницкий С.Г. Теория упругости анизотропного тела - М.: Главн. ред. физ.-мат. лит. изд-ва «Наука», 1977. - 416 c.
