Цифровая адаптивная система для измерения частоты и амплитуды

Автор: Никитин А.В., Перченко С.В.
Журнал: Математическая физика и компьютерное моделирование @mpcm-jvolsu
Рубрика: Моделирование, информатика и управление
Статья в выпуске: 3 т.28, 2025 года.
Бесплатный доступ
Предложена структура двухканальной адаптивной цифровой системы для динамического измерения частоты и амплитуды квазигармонических сигналов с медленно меняющимися параметрами. Показано, что данная система требует небольшого количества операций и может быть реализована как система реального времени на базе современных микроконтроллеров. Приводятся результаты численного моделирования процесса измерения частоты и амплитуды с помощью предложенной системы.
Адаптивная система, измерение частоты, измерение амплитуды, коэффициент прореживания, реальное время
Короткий адрес: https://sciup.org/149149340
IDR: 149149340 | УДК: 621.317.361 | DOI: 10.15688/mpcm.jvolsu.2025.3.2
Digital Adaptive System for Frequency and Amplitude Measurement
A method for dynamic measurement of frequency and amplitude of quasi-harmonic signals with slowly varying parameters is proposed. Parameter estimates are obtained in the approximation of the limited spectrum of the signal. Expressions describing systematic and random errors of the developed method in the presence of additive noise with a given variance are presented. On the basis of these expressions, the optimal conditions of the method operation are determined and an algorithm is developed that allows updating the frequency and amplitude estimates at each sampling interval. The algorithm is implemented as a two-channel adaptive digital system, which does not require a large number of operations and can be implemented as a real-time system based on modern signal processors and microcontrollers. The results of numerical modeling of the process of frequency and amplitude measurement using the proposed system are presented. It was found that even in the presence of tone amplitude modulation, additive noise, and slow twofold frequency change, the relative errors of frequency and amplitude estimates are 9.2 · 10−4 and 3.6 · 10−3 , respectively. The data obtained show that the adaptive system gives better results than the system without adaptation if at least an approximate frequency value is not known in advance.
Текст научной статьи Цифровая адаптивная система для измерения частоты и амплитуды
DOI:
В ряде задач радиофизики и радиотехники измерение параметров нестационарных систем сводится к анализу квазигармонических колебаний следующего вида:
х (t) = X (t) cos (0 (t)) , (1)
то есть к определению законов изменения амплитуды X (t) и мгновенной частоты, которая является производной полной фазы: w(t) = 0(t). Большинство существующих цифровых методов не позволяет с достаточной точностью получить оценку мгновенной частоты на коротком (порядка двух периодов сигнала) интервале наблюдения, либо требует существенных вычислительных затрат.
В работах [3; 6; 7] описан цифровой параметрический метод оценивания мгновенной частоты сигнала (1), в работе [4] он дополнен методом измерения амплитуды и проведен анализ его точности и устойчивости, а в статье [5] приведены результаты сравнения его характеристик с характеристиками аналогичных методов. Метод позволяет оперативно получить достаточно точные оценки частоты узкополосных сигналов, но его погрешности существенно возрастают, если частота изменяется медленно, но достаточно сильно. Для сохранения высокой точности необходимо изменять один из параметров этого метода при изменении частоты, то есть применять адаптацию. В данной работе предлагается структура адаптивной системы для измерения частоты и амплитуды сигналов вида (1) с медленно меняющимися параметрами.
Рассмотрим три значения смеси сигнала (1) с белым нормальным шумом ^(t) с нулевым средним и дисперсией о 2 в точках t — кТ, (к = 0,1, 2), где Т удовлетворяет условиям медленности изменения частоты и амплитуды [3]:
1 1 •
XT (t) < тХ (t), 0(t) < Т 0 (t)
Более строгие условия единственности квазигармонического представления (1) приведены в работе [1]. Если параметр Т удовлетворяет условию Найквиста: Т < 1/(2f max ), где f max — максимальная частота спектра сигнала x(t), оценки частоты и амплитуды будут иметь вид [4]:
/(«-Т ) = 2ПТ “^“s (* (‘2+(i -Т^) ) =f (i — Т) + 6/ ( — Т) ,(3)
X(t — т ) = XXТTXX!xX—T) = x (t — т) + бх (t — т).(4)
sin (2nf (t — Т ) Т}
Систематические и случайные погрешности этих оценок определяются выражениями:
X \ , , 2 1 + 2cos2 (2nfT)
(5f) = пТctg (2п fT) f + tg (0) ’ °f = Q 2У2Т2 • 2M ™ °
2nX f 8n 2 X 2 1 2 sin 2 (2nf 1 ) cos 2 (0)
nXT 2 (cos 2 (0) — cos 2 (2nfT )) tg (0)
^ ) =----------- sin (2nfT) f — T ctg (2nf T) tg (0) X ,
σ
х
4 sin2 (0 + 2nfT) sin2 (0 — 2nfT) + sin2 (0) (sin2 (0 + 2nfT) + sin2 (0 — 2nfT))
арккосинуса в формуле (3) можно найти путем минимизации функционала погрешности:
— x[k] — x[k — 2Q] ) .
J 1 [n] = ]E ( 2x[k - Q] cos (2nf[n]QA^
k = n - M +1
Целочисленный параметр M = L — 2Q определяет количество усреднений в рамках скользящего окна. Подкоренное выражение в формуле (4) можно найти, усреднив его в том же диапазоне. Оценки частоты и амплитуды примут следующий вид:
f [ n ] =
——— arccos 2nQA
^ E (x[k — 2Q] + x[k])x[k — Q] ^
k = n - M +1
n
2 E x 2 [k — Q]
k = n - M +1 /
^^[ n ] =
n
∑︀ k=n-M +1
(x 2 [k — Q]
— x[k]x[k — 2Q])
У М sin ( 2nf [n]QA ^
Эти оценки соответствуют моменту времени (n — R)A, где R = (L — 1)/2 - задержка оценок. Будем полагать, что L и M нечетны, тогда задержка будет содержать целое количество интервалов A. Погрешности оценок (5) и (6), вызванные наличием аддитивного шума с дисперсией о 2 , получены в работе [4] для случая M ^ Q:
2Г 1 1 2
°[n — R ] = 2n 2 A 2 QM 2 Х 2 [n — R] sin 2 (2nf [n — R]QA) ° ’
2 [ M — 32 — (2M — Q) cos 2 (2nf [n — R]QA) + M cos 4 (2nf [n — R]QA) ]
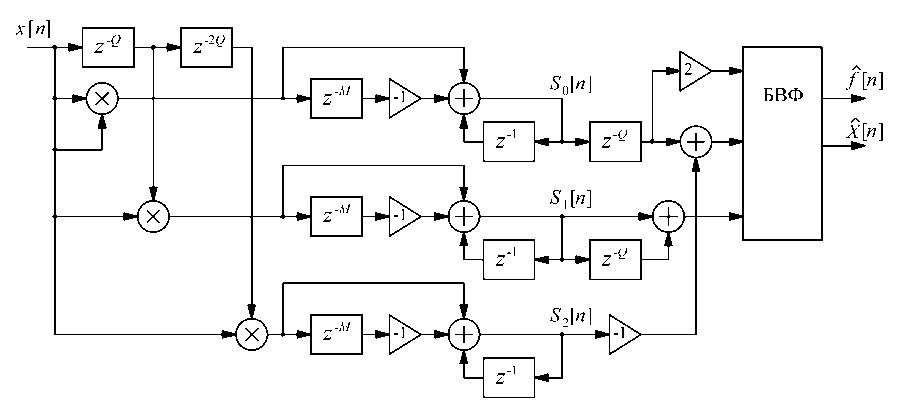
Рис. 1. Cтруктурная схема системы для оценивания частоты и амплитуды
Структура системы для оценивания частоты и амплитуды представлена на рисунке 1. Видно, что расчет трех сумм S 0 [п], S 1 [п] и S 2 [п] и их комбинаций, входящих в выражения (9) и (10), требует всего 11 операций сложения и одно умножение и легко реализуется средств а ми цифровой фильтрации. Блок вычисления функций (БВФ) arccos(x/y), sin(x) и ^х может быть реализован на базе массивов памяти, в которые заранее вводятся значения этих функций.
Если частота сигнала (1) изменяется медленно в соответствии с условием (2), но достаточно сильно, для минимизации погрешностей (7) можно корректировать коэффициент прореживания Q, не изменяя шаг дискретизации Д. При этом частота дискретизации должна существенно превышать даже максимальную частоту сигнала:
Д/ max < 1.
Построим систему из двух идентичных каналов, считая неизменной длину скользящего окна L:
L = 2Q 1 + M i = 2Q 2 + М 2
и полагая, что L ^ Q1 и L ^ Q2. При запуске этой системы первый канал является ведущим, а выходные оценки системы совпадают с его оценками: f[п] = f1 [п], X[п] = = X1 [п]. После окончания переходного процесса длительностью LД в рамках каждого окна [(к — 1)LД, (kL — 1)Д] (к > 1) рассчитывается средняя частота и оптимальное значение целочисленного коэффициента прореживания Q0, которое передается первому каналу:
ki -i
.
4/Д
f = ^ /Н Q0
n =( k -1) L
Ведущим становится второй канал, а выходные оценки системы принимают вид: f [п] = = f 2 [п], ХС[п] = X 2 [п]. В первом канале начинается переходный процесс. Этот алгоритм продолжается непрерывно, а предложенная система является адаптивной.
На рисунке 2 показаны временные диаграммы, иллюстрирующие описанный процесс. Адаптивные системы активно используются при решении задач оценивания параметров сигналов [2].
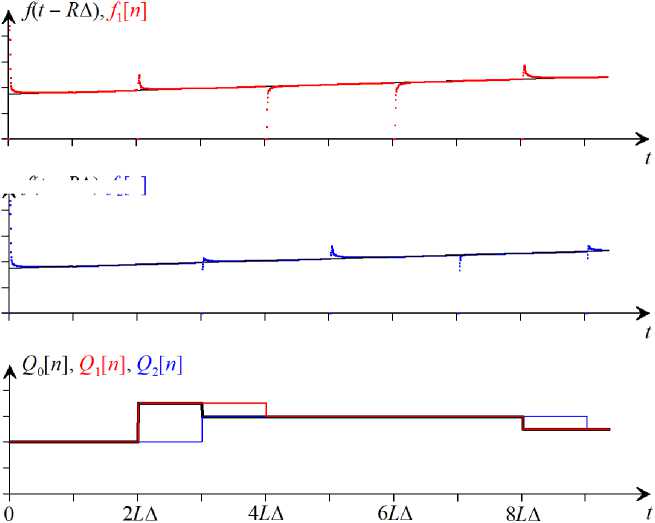
Рис. 2. Временные диаграммы работы адаптивной системы
Л>-ЛДМ;И
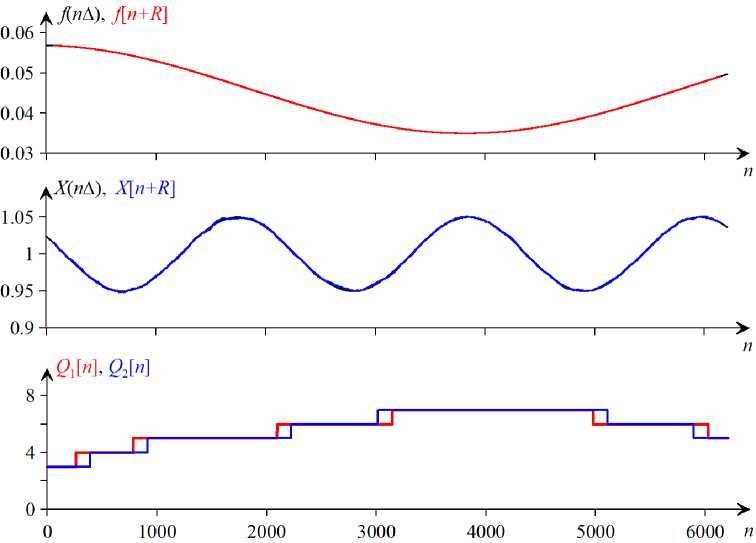
Рис. 3. Результаты обработки модельного сигнала
Для проверки работы предложенного адаптивного метода было проведено численное моделирование. Обрабатывалась последовательность отсчетов сигнала х[п] с тональной амплитудной и частотной модуляцией при наличии аддитивного шума:
х[п] = X [п] cos(0[n]) + ^[п], п = 0,... ,N — 1.
Задавались гармонические законы изменения амплитуды, частоты и полной фазы:
X [п] = Х о + А х cos (|ПпА + фХ) , f [п] = f o + A f cos ^|ПnA + ф^ ,
0[п] = lпfonA + AfTf sin ^|ПпА + ф^ + фо, где А = 1, Хо = 1, Ах = 0,05, Тх = I105A, фх = 1,07, f0 = 0,046, Af = 0,011, Tf = 7834А, фf = 0,081, ф0 = 0,081, n = 0,01, N = 6110, длина скользящего окна L = 131. Результаты обработки представлены на рисунке 3.
Максимальные относительные отклонения оценок частоты и амплитуды в диапазоне [IL,..., N — 1] составили 5 f = 0,00091 и 5 х = 0,0036. Для того же сигнала при том же значении L рассчитывались оценки частоты и амплитуды без адаптации с фиксированным значением Q. Максимальные отклонения оценок в зависимости от Q представлены в таблице. Видно, что адаптивный метод дает лучшие результаты, особенно, если заранее неизвестно хотя бы приближенное значение частоты.
Максимальные относительные отклонения оценок частоты и амплитуды
|
Q |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
б / |
0,01361 |
0,00391 |
0,00223 |
0,00150 |
0,00102 |
0,00094 |
0,00094 |
0,00151 |
|
5 х |
0,00854 |
0,00376 |
0,00356 |
0,00374 |
0,00364 |
0,00366 |
0,00369 |
0,00752 |
Предложенная цифровая адаптивная система для динамического измерения частоты и амплитуды квазигармонических сигналов может быть реализована на базе сигнальных процессоров, таких как ADSP-BF532, ADSP-21261, TMS320C6745, или на базе микроконтроллера с поддержкой инструкций ЦОС, например, STM32H750.
