Датчик угловых ускорений для стендовых исследований микровибрации систем высокоточного наведения и стабилизации линии визирования научной аппаратуры

Автор: Борисов Максим Игоревич, Владыкин Сергей Алексеевич, Жартовский Григорий Саввич, Ложкин Даниил Сергеевич, Пахмутов Павел Александрович, Почекутов Денис Владимирович, Сумароков Антон Владимирович, Федосеев Сергей Валентинович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Наземные комплексы, стартовое оборудование, эксплуатация летательных аппаратов
Статья в выпуске: 2 (13), 2016 года.
Бесплатный доступ
В статье описывается датчик угловых ускорений, разработанный для стендовых испытаний и отработки систем высокоточного наведения и стабилизации линии визирования научной аппаратуры. Рассмотрены известные конструкции и схемы измерения однокомпонентных угловых ускорений. Показано, что для высокоточных измерений параметров микровибраций научной аппаратуры необходимо использовать только преобразователи, метрологические свойства которых апробированы. Разработанный датчик предназначен для однокомпонентных измерений параметров угловых ускорений в условиях действия многомерной вибрации от единиц угловых секунд и выше в диапазоне частот от долей до нескольких сотен герц. Датчик был использован при исследованиях микровибрации двухосной платформы наведения «Монитор» в наземных условиях на специально разработанном стенде разгрузки перед ее установкой на Российский сегмент Международной космической станции.
Датчик угловых ускорений, многомерная вибрация, однокомпонентные измерения микровибраций, стенд разгрузки, двухосная платформа наведения
Короткий адрес: https://sciup.org/14343519
IDR: 14343519 | УДК: 681.586.773''325
Angular accelerometer for bench microvibration testing of high-precision guidance and stabilization system for line-of-sight of science hardware
The article describes the angular accelerometer developed for bench tests and development testing of high-precision guidance and stabilization systems for science hardware line-of-sight. Consideration is given to known structures and measurement designs for one-component angular accelerations. It is shown that only converters with proven metrological properties shall be used for high-precision measurements of microvibration parameters of science hardware. The developed accelerometer is intended for one-component measurements of angular vibration parameters when exposed to multidimensional vibration from units of arc seconds and higher within the frequency range from fractions to several hundreds of Hertz. The accelerometer was used in investigations of microvibration of two-axial guidance platform «Monitor» in ground conditions on a specially designed desaturation bench before its installation on the Russian Segment of the International Space Station.
Текст научной статьи Датчик угловых ускорений для стендовых исследований микровибрации систем высокоточного наведения и стабилизации линии визирования научной аппаратуры
борисов м.и.

влаДыкин с.а.
Жартовский г.с.

лоЖкин Д.с.

пахмутов п.а.

почекутов Д.в.

сумароков а.в.

ФеДосеев с.в.
При наземной отработке поворотных и стабилизированных платформ космической аппаратуры возникает необходимость в оценке угловых микровозмущений, влияющих на точность наведения и стабилизации осей визирования служебного и научного оборудования. Такие микровозмущения могут возникать при работе приводов (двигатели, редукторы и т. д.) и подвижных элементов научной аппаратуры и составлять в широком диапазоне частот (от долей до нескольких сотен герц) единицы и десятки угловых секунд.
В технике широко применяются промышленные датчики угловых ускорений [1], однако при решении многих задач их использование проблематично из-за недостаточного рабочего частотного диапазона, высокого порога чувствительности, значительных массо-габаритных характеристик и низких метрологических свойств.
При создании средств навигации и устройств, обеспечивающих высокую точность их стабилизации и пространственного ориентирования, приоритетными являются однокомпонентные датчики, способные обеспечивать требуемые метрологические свойства в условиях действия многомерной вибрации.
Известным и распространенным является компенсационный метод построения однокомпонентных измерений угловых ускорений с использованием пространственно разнесенных линейных датчиков, преимущественно пьезоакселерометров. Взаимное сложение и вычитание сигналов линейных акселерометров позволяет выделить интересующую компоненту колебаний [2]. Однако, описанные в литературе многочисленные конструкции датчиков угловых ускорений, разработанных на этой основе, например, с использованием биморфных консольных пьезопластин или пакетов пьезоэлементов, нагруженных инерционными массами, практической реализации не получили. Одной из причин является то, что датчики угловых ускорений выполнены на уровне патентных разработок и не содержат апробированных конструкций или технологических приемов, гарантирующих требуемые метрологические свойства, в частности, устойчивость к воздействию линейных компонент вибрации. Отсутствие специальных мер по обеспечению точностных характеристик датчиков угловых ускорений, построенных на использовании указанного выше компенсационного метода измерений, может приводить к недостоверным результатам измерений: сигналы, генерируемые линейными датчиками за счет поступательного движения, превышают таковые на порядок и более за счет угловых ускорений [3]. Это актуализирует задачу разработки высокоточного однокомпонентного датчика угловых ускорений с использованием компенсационного метода измерений.
однокомпонентный датчик угловых ускорений
В описанном здесь датчике угловых ускорений вышеуказанные недостатки либо устранены, либо их влияние сведено к минимуму благодаря использованию линейных пьезоакселерометров с нормализованной чувствительностью и конструктивной схеме их крепления.
Датчик состоит из основания 1, двух однотипных линейных пьезоакселерометров 2, сумматора зарядов 3 и кабеля 4 для их электрической связи (рис. 1).
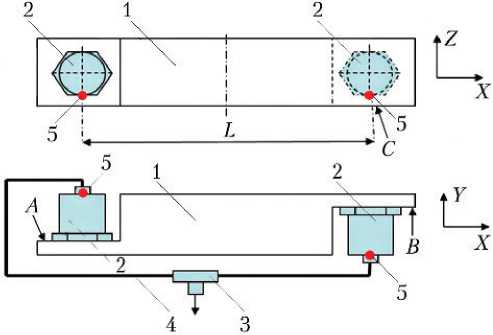
Рис. 1. Датчик угловых ускорений: 1 — основание; 2 — пьезоакселерометр; 3 — сумматор зарядов; 4 — кабель; 5 — красная точка; A, B — поверхности для крепления пьзоакселерометров; С — поверхность для крепления датчика угловых колебаний на объекте измерения; L — базовое расстояние
Линейные пьезоакселерометры имеют нормализованную чувствительность по заряду, отрегулированную в процессе их заводского производства на определенное круглое значение, например, 1, 10 или 1 000 пКл/мс–2 с высокой точностью. В паспортах нормализованная чувствительность каждого линейного пьезоакселерометра указывается до третьей значащей цифры [4], что позволяет подбирать однотипные пьезоакселерометры с одинаковым ее значением и отказаться от схемного или конструктивного выравнивания чувствительностей разнесенных пьезоакселерометров и, как следствие, исключать одну из существенных составляющих погрешностей измерения.
Другой важной составляющей погрешностей измерения является чувствительность линейных пьезоакселерометров к неизмеря-емым компонентам вибрации, в первую очередь — поперечная чувствительность. Для ее определения используется номограмма, показанная на рис. 2 [4].
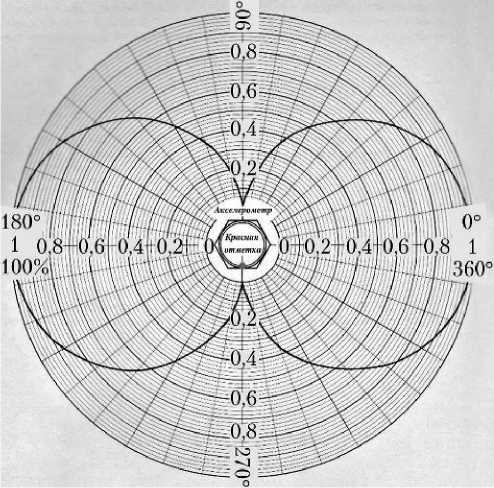
Рис. 2. Номограмма для определения поперечной чувстви- тельности пьезоакселерометра
В зависимости от направления вектора поперечной вибрации по номограмме определяют ее долю от паспортируемого максимального значения поперечной чувствительности, установленного при заводских испытаниях. Как видно из номограммы, векторы максимальной (ось 0-180°) и минимальной (ось 90-270°) поперечной чувствительности находятся под углом 90°. Определенное при заводских испытаниях направление минимальной поперечной чувствительности отмечается на корпусе пьезоакселерометра красной точкой 5 (см. рис. 1). Следует отметить, что полярность генерируемых зарядов всех однотипных нормализованных пьезоакселерометров одинаковая как в направлении оси чувствительности, так и в поперечном направлении.
Основание 1 датчика угловых ускорений (см. рис. 1) выполнено жестким, недеформи-руемым в диапазоне измеряемых частот. Разнесенные на базовое расстояние L линейные пьезоакселерометры 2 закреплены на параллельных поверхностях А и B основания. Поверхность (плоскость) С выполнена перпендикулярно поверхностям А и В и оси измерения угловых ускорений (ось Z ). Она служит для установки датчика на объекте измерения.
Пьезоакселерометры 2 соединены электрически параллельно, их заряды по кабелю 4 поступают на сумматор 3. Для пьезоакселерометров с нормализованной по заряду чувствительностью можно не учитывать присоединенную емкость кабеля и, таким образом, не налагать ограничений на его длину [4]. В качестве сумматора зарядов может быть использован высокочастотный байонетный разъем, с выхода которого сигнал подается на стандартный измеритель заряда, используемый в технике виброизмерений.
Как следует из рис. 1, линейные пьезоакселерометры 2 установлены на основании 1 осями чувствительности встречно и параллельно оси углового измерения (ось Z ). При воздействии на основание 1 линейного ускорения (вдоль оси Y ) заряды пьезоакселерометров с нормализованной чувствительностью на сумматоре 3 взаимно компенсируются. При угловых колебаниях основания 1 (вокруг оси Z ) с выхода сумматора 3 на измеритель заряда поступает удвоенный (суммарный) заряд пьезоакселерометров 2, тем больший, чем больше базовый размер L .
Для повышения помехозащищенности датчика угловых ускорений от неизмеряемых компонент многомерной вибрации линейные пьезоакселерометры 2 закреплены на основании 1 так, чтобы оси их минимальной поперечной чувствительности (ось 90-270 ° на рис. 2) были параллельными оси измерения углового ускорения (ось Z ) с односторонним расположением красных точек 5 на корпусах, как показано на рис. 1. Это обеспечивает минимальную поперечную чувствительность датчика угловых ускорений в направлении осей Z и Х . Вдоль оси Х минимизация поперечной чувствительности обеспечивается за счет вза-имокомпенсации соответствующих сигналов пьезоакселерометров, оказывающихся в противофазе из-за разворота лепестков номограммы.
Чувствительность датчика к неизмеряемым компонентам угловых колебаний зависит от чувствительности к неизмеряемым линейным компонентам. Минимизация последней обеспечивает помехозащищенность датчика к неиз-меряемым компонентам угловых колебаний.
Для калибрования датчика угловых ускорений могут быть использованы те же средства, что и для линейных датчиков. На эталонном вибростенде задают ускорение Ẍ , м/с2 одному пьезоакселерометру и с помощью измерителя заряда измеряют выходное напряжение U , В. В предположении, что второй пьезоакселерометр колеблется так же, но в противофазе, и их суммарный заряд удваивается, это равносильно действию угловых колебаний на оба датчика, разнесенных на базовое расстояние L , м и объединенных общим основанием. Тогда чувствительность датчика к угловым ускорениям составит
γ = ( Ẍ )–1 UL,
В . с2 рад .
Среднее квадратическое значение (СКЗ) погрешности калибрования датчика с учетом характеристик эталонного вибростенда может составлять ±0,5%. СКЗ суммарной погрешности измерения угловых ускорений с помощью датчика, в котором используются линейные пьезоакселерометры с нормализованной чувствительностью, не превышает ±2,5%.
конструкция двухосной платформы наведения «монитор» и стенда обезвешивания
Разработанный ВНИИтрансмаш датчик угловых ускорений был использован для исследования микровибраций и их уменьшения при наземной отработке двухосной платформы наведения (ДПН) «Монитор». Платформа предназначена для эксплуатации в открытом космосе и закреплена на установочной поверхности Российского сегмента Международной космической станции (МКС). В ее функции входит обеспечение:
-
• точного наведения полезной нагрузки (ПН) по двум взаимно перпендикулярным осям;
-
• слежения за различными объектами и процессами в открытом космосе с установленной на платформе ПН.
ДПН может входить в состав внешнего наблюдения и обеспечивать выполнение различных операций контроля внешней поверхности МКС и действий экипажа при его работе в открытом космосе.
При использовании по назначению ДПН обеспечивает:
-
• ориентацию оси аппаратуры в заданном направлении;
-
• управление ориентацией оси аппаратуры по двум направлениям в соответствии
с траекторией, задаваемой бортовой цифровой вычислительной машиной;
-
• измерение положения оси аппаратуры по двум направлениям относительно базовой системы координат.
Двухосная платформа наведения (рис. 3) представляет собой единую конструкцию, основными узлами которой являются:
-
• блоки электромеханических приводов 6 и 10 со встроенными датчиками углов поворота и управляемыми тормозами, обеспечивающие разворот и удержание ПН вокруг двух взаимно перпендикулярных осей X (угол β ) и Y (угол α );
-
• контейнер 12 для блоков электроники и активной части системы обеспечения теплового режима;
-
• угольник 8, соединяющий приводы наведения;
-
• кронштейн 5 с тремя площадками для замков крепления ПН;
-
• панели 4 и 13 с соединителями для подключения приборов ПН к ДПН и к борту;
-
• кабельная сеть;
-
• узлы крепления ДПН в грузовом транспортном контейнере и таре.
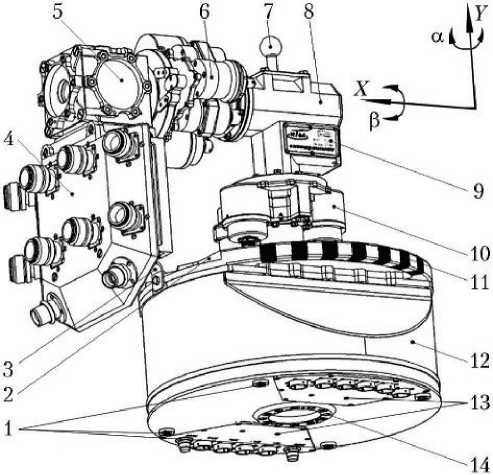
Рис. 3. Общий вид двухосной платформы наведения (ДПН): 1 — места крепления ДПН в грузовом транспортном контейнере и в таре; 2 — крышка контейнера; 3 — транспортировочный кронштейн; 4 — панель верхняя; 5 — кронштейн; 6 — привод β ; 7 — штырь; 8 — угольник; 9 — бирка; 10 — привод α ; 11 — поручень; 12 — контейнер; 13 — панели нижние; 14 — площадка для установки замка крепления ДПН на штанге
В связи с тем, что в качестве ПН было предложено использовать телевизионную камеру высокого разрешения HRC канадской фирмы UrtheCast , возникла необходимость в оценке угловых колебаний ДПН вокруг осей X и Y и разработке мероприятий по ослаблению их влияния.
Анализ конструкции ДПН (рис. 3) показывает, что в качестве основных источников микроколебаний элементов конструкции ДПН могут выступать приводы наведения 6 и 10, содержащие электродвигатели, зубчатые соединения, подшипниковые узлы и электромагнитные тормоза, а трансформирующими к ПН микровозмущениями служат детали и узлы платформы со своим спектром собственных частот изгибных и угловых колебаний. Собственные частоты зависят от инерционных характеристик отдельных узлов, наличия зазоров в подвижных элементах конструкции, контактной жесткости сопрягаемых деталей и ряда других факторов.
Измерение угловых колебаний ДПН выполнялось с использованием разработанного ВНИИтрансмаш стенда разгрузки с системой «обезвешивания» (рис. 4). Он представляет собой жесткий портал 2, на котором закрепляется платформа 3. В нем элементы 6, 7 и 8 механизма подвеса создают разгрузочное усилие с точностью «обезвешивания» 0,1 Н. Стенд позволяет осуществить свободный поворот разгруженной части платформы относительно осей наведения в пределах углов ±175 ° . Специальный имитатор 12 служит для инерционного нагружения платформы, эквивалентного влиянию ПН.
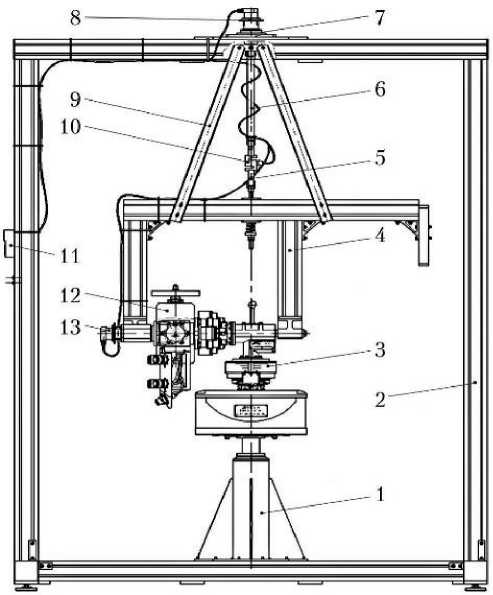
Рис. 4. Стенд разгрузки с установленной двухосной платформой наведения (ДПН): 1 — тумба; 2 — портал; 3 — ДПН; 4 — рамка; 5 — подвес; 6 — штанга подвеса; 7 — шарнир подвеса; 8 — датчик положения по оси р ; 9 — фиксаторы; 10 — динамометр; 11 — электронный тензометричеcкий блок; 12 — имитатор полезной нагрузки; 13 — датчик положения по оси a
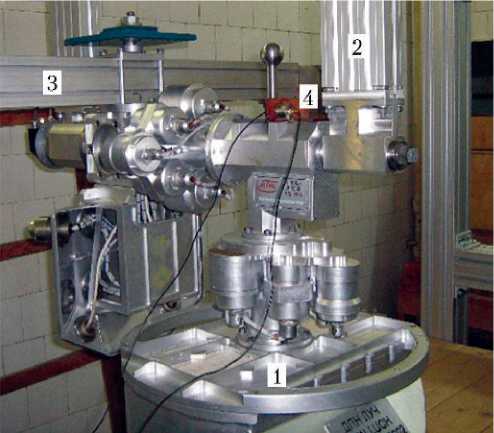
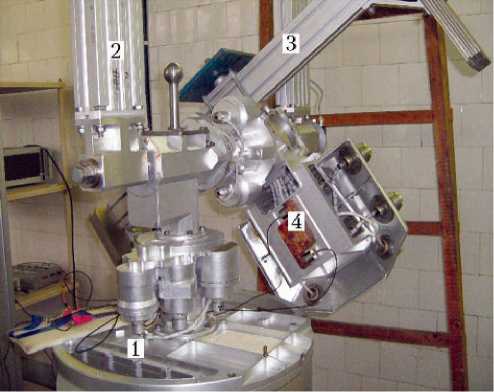
Угловые колебания измерялись вокруг оси Y (угол а ) с установкой датчика угловых колебаний на переходном угольнике (рис. 5, а) и вокруг оси Х (угол р ) на рамке крепления верхней панели (рис. 5, б).
а)
б)
Рис. 5. Испытания двухосной платформы наведения (ДПН) на стенде разгрузки: а — движение вокруг оси Y (угол а); б — движение вокруг оси Х (угол р); 1 — ДПН; 2 — стенд разгрузки; 3 — имитатор полезной нагрузки; 4 — датчик угловых ускорений особенности микровибраций Дпн
Результаты этих измерений использовались в качестве оценочной характеристики работы ДПН. Все изменения, вносимые в программу управления ДПН на этапе конструкторско-доводочных испытаний, сопровождались контролем и анализом параметров угловых колебаний. Они обеспечили возможность высокоточного наблюдения с борта МКС за интересующими объектами на поверхности Земли с помощью телевизионной камеры HRC с разрешением 1,5…2,0 м.
Так как устойчивость работы используемой на ДПН полезной нагрузки (телевизионная камера высокого разрешения HRC ) привязана к параметрам угловой скорости (угл. мин/с), сигнал датчика угловых ускорений однократно интегрировался. Регистрация и частотный анализ виброграмм угловой скорости осуществлялись с помощью анализатора спектра ZET -017- Т 8.
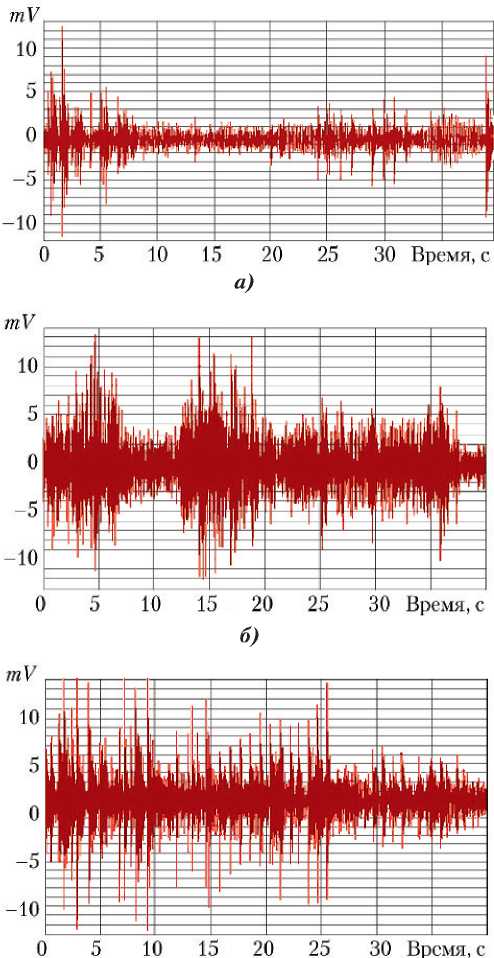
На рис. 6 и 7 представлены примеры записи виброграмм угловой скорости ДПН вокруг осей Y и Х и их амплитудно-частотных спект- ров (масштаб 0,31 угмлВ.м. син).
в)
Рис. 6. Виброграммы угловой скорости двухосной платформы наведения при движении вокруг оси Y (угол а ): a — скорость 1 °/с, с одним подключенным программным GH-фильтром; б — скорость 3 °/с, с одним подключенным программным GН-филыnром; в — скорость 1 °/с, без GН-фильтра
Приведенные на рис. 6 виброграммы соответствовали движению ДПН вокруг оси Y (угол а ):
-
• со скоростью 1 ° /с (рис. 6, а) и 3 ° /с (рис. 6, б) с одним подключенным программным GН- фильтром;
-
• со скоростью 1 ° /с (рис. 6, в) без программных GН- фильтров;
Амплитудно-частотные спектры на рис. 7 представлены для виброграмм на рис. 6 соответственно их буквенным обозначениям.
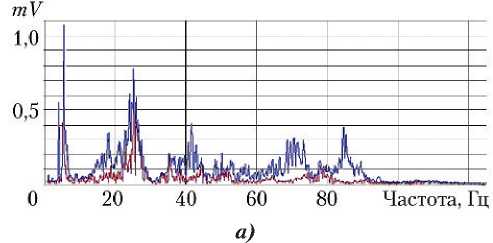
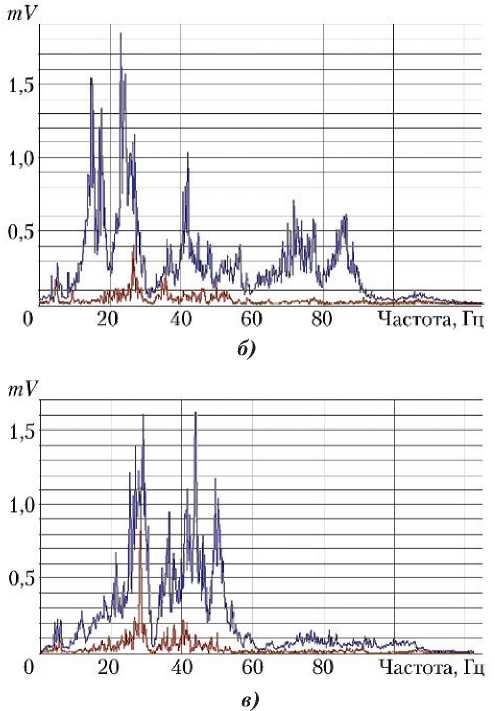
Рис. 7. Амплитудно-частотные спектры максимальных и средних значений угловой скорости двухосной платформы наведения: a — скорость 1 °/с, с одним подключенным программным GH-^ильтром; б — скорость 3 °/с, с одним подключенным программным GН-фильтром; в — скорость 1 °/с, без GН-фильтра
Как видно из приведенных данных, угловые микроколебания ДПН имеют случайный широкополосной характер с достаточно выраженными узкополосными составляющими, амплитуды и средние значения частот которых отражают конструктивные особенности платформы и режимов ее работы, являясь, таким образом, информативными признаками этих особенностей.
заключение
Таким образом, во время конструкторско-доводочных испытаний ДПН «Монитор» были проверены и положительно оценены технические возможности разработанного датчика угловых ускорений в части однокомпонентных измерений возмущений малых уровней (от долей угловых секунд) в широком диапазоне частот, целиком определяемом свойствами входящих в него линейных пьезоакселерометров и измерителей зарядов. Такой датчик может найти широкое применение при отработке других систем, например, средств навигации и оптического наведения, а также устройств, обеспечивающих высокую точность их стабилизации и пространственного ориентирования, где актуальны вопросы обеспечения точности наведения и стабилизации линии визирования научной аппаратуры в условиях действия многомерной вибрации.
Список литературы Датчик угловых ускорений для стендовых исследований микровибрации систем высокоточного наведения и стабилизации линии визирования научной аппаратуры
- Датчики теплофизических и механических параметров. Справочник в 3 т./Под общ. ред. Коптева Ю.Н. М.: ИПРЖР, 1999. Т. 2. 688 с.
- Вибрации в технике. Справочник в 6 т./Под ред. Дименетберга Ф.М., Колесникова К.С. М.: Машиностроение, 1980. Т. 3. 544 с.
- Еwins D.J. Modal Testing: Theory and Practice. New York: Research Studies Press, 1984. 269 p.
- Пьезоэлектрические акселерометры и предусилители: Справочник по теории и эксплуатации. Дания: Изд. фирмы «Брюль и Къер», 1987. 186 с.
