Динамическая модель механизма с параллельной кинематикой

Автор: Смирнов Владимир Алексеевич, Петрова Лина Николаевна
Рубрика: Расчет и конструирование
Статья в выпуске: 11 (144), 2009 года.
Бесплатный доступ
Представлена методика получения уравнений динамики механизма с параллельной кинематикой, имеющего штанги переменной длины.
Динамическая модель, механизм с параллельной кинематикой, гексапод
Короткий адрес: https://sciup.org/147151457
IDR: 147151457 | УДК: 621.865.8
Dynamic model of the mechanism with parallel kinematics
The presented methods of the derivation of the dynamic equations for the mechanism with parallel kinematics with variable-length barbells.
Текст научной статьи Динамическая модель механизма с параллельной кинематикой
Перспективность использования механизмов с параллельной кинематикой при построении технологического оборудования в силу ряда их положительных качеств не вызывает сомнений [1]. При проектировании технологического оборудования, построенного на основе таких механизмов, возникает потребность в решении задач кинематики и динамики.
Решение задач кинематики позволяет связать между собой при помощи математических зависимостей выходные координаты механизма с его обобщенными координатами: прямая задача связана с определением выходных координат по известным обобщенным; цель решения обратной задачи - определение обобщенных координат по заданным выходным. Составление уравнений кинематики рассмотрено во многих публикациях, например [1, 2]. Эти уравнения могут использоваться при анализе рабочего пространства механизма с параллельной кинематикой [3], а также при решении траекторных задач применительно к технологическому оборудованию, построенному на основе подобных механизмов [4].
Динамический анализ позволяет учитывать такие параметры конструктивных элементом технологического оборудования, как масса и моменты инерции. Прямая задача динамики - определение параметров движения элементов оборудования и возникающих в них усилий при заданных усилиях приводов - представляет интерес при проверочных расчетах и при моделировании функционирования оборудования. Решение обратной задачи динамики - определение усилий приводов, необходимых для обеспечения движения исполнительного органа оборудования в заданном направлении или с заданным усилием - представляет интерес как с позиций управления оборудованием, так и с позиций проектирования: получаемая в ходе решения этой задачи информация о характере движения элементов оборудования (линейных и угловых скоростях и ускорениях) с учетом их массо-инерционных характеристик и возникающих в них усилиях может использоваться в прочностных расчетах.
При решении задач динамики возникает необходимость в получении уравнений, позволяющих описывать поведение оборудования с учетом массо-инерционных характеристик его элементов, т. е. в построении динамической модели. Эти уравнения позволят осуществлять моделирование работы оборудования на качественно более высоком, по сравнению с уравнениями кинематики, уровне, в том числе обеспечивая исследования динамических погрешностей при решении траекторных задач.
Рассмотрим динамическую систему, в которую входят механизм типа «гексапод» [1] и приводы, обеспечивающие движение элементов этого механизма. Гексапод включает в себя подвижную платформу, соединенную с основанием с помощью шести штанг, способных изменять свою длину (рис. 1). Примем, что обобщенными координатами q( для этого механизма являются величины, связанные с длинами штанг.
Подвижная рвн
Штанги
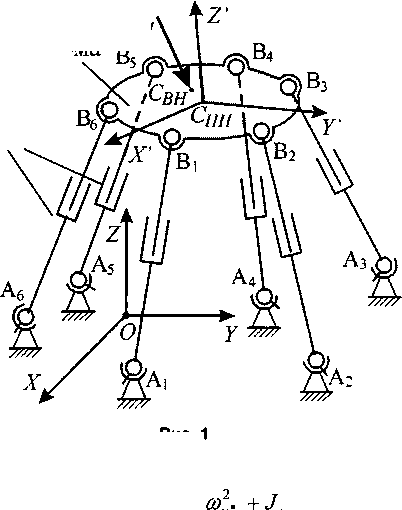
Рис. 1
Для составления уравнений динамики данной динамической системы можно воспользоваться уравнениями Лагранжа 2-го рода [5]:
а\ аг dtyjacp
r=QPj=^,
где Т - кинетическая энергия системы; Qj - обобщенная сила, соответствующая j-й обобщенной координате.
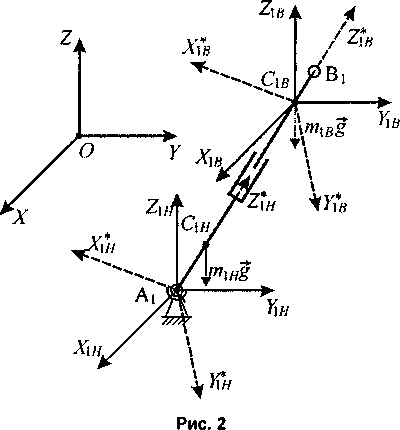
Рассмотрим одну из штанг переменной длины (рис. 2). Штанга состоит из двух частей: нижней массой тхн и верхней массой тхв, соединенных посредством поступательной кинематической пары. Определим кинетическую энергию этой штанги.
Нижняя часть штанги может рассматриваться как твердое тело с одной закрепленной точкой А], поэтому ее кинетическая энергия может быть записана в следующем виде [5]:
Т ю ю _j ю ю _J ю ю , (2) 2 мнАн мн Ан Анмн Ан Ан мнмн -ан мн где компоненты тензора инерции нижней части штанги JXH и проекции угловой скорости ®хн записаны для осей связанной со штангой подвижной системы координат A.xXxhYxhZxh . Компоненты тензора инерции при этом будут постоянными величинами. Если оси системы координат XxXxhYxhZxh являются главными осями инерции для нижней части штанги в точке А], то выражение для кинетической энергии примет следующий более простой вид:
т- _ Х1Н Х\Н Ан Ан zw z\h
Верхний элемент штанги совершает сложное пространственное движение. Кинетическая энергия этого элемента в соответствии с теоремой Кёнига будет складываться из двух составляющих: кинетической энергии движении центра масс С15 в предположении, что в нем сосредоточена вся масса элемента, и кинетической энергии вращения элемента вокруг центра масс:
гр _ грЦ.М . ’рВр 1\в -^в ^*\в *
Первое слагаемое в (4) можно записать следующим образом:
^8 М'- 27И18|тС|д| .
Скорость vCifi точки Схв определяется как
VC]S =|A]Cls|S] + ^, следовательно, |тС]Д|2 = [AjC^]2 оу,2 + ^2
(так как 5] ± ^ ) и
Тхцвм =^тхв
|А]С1Д|2(®2. + <У2. + ®2. ) + £[ , 1 МН цн ^лн где qx - производная по времени обобщенной координаты. В качестве обобщенной координаты можно принять длину штанги - расстояние между шарнирами А] и В,, однако с целью упрощения математических выкладок примем за обобщенную координату длину |A]CW|. Тогда
Tjs ~ 2 W1S 9х ^®.
2 7 2 х • 2
' • +(0". +0 . ) + ^ . х\н чн Ан
Второе слагаемое в (4) можно записать аналогично (2):
„ JсоЧ *J.co\*J . соЧ
ТВР- ххв Ххв YXB У15 ____ ZXB ZXB , _ , _ ,
-
18 2 -^IS^lS Ххв YXB Y*BZXB YXB ZXB ZXBXXB ZXB XXB ’
где система координат CxbXxbYxbZxb связана с верхним элементом. Так как проекции вектора на сонаправленные оси равны, то последнее выражение можно переписать в виде
J . юЧ + J . ю1. . юЧ
ТВр = Ххв Ххн YxH Z'H - I m m - T m m m m
-
18 2 XXBYXB XXH YXH YXBZXB YXH ZXH ZXBXXB ZXH Xxff ’
если принять, что соответствующие оси систем координат CxbXxbYxbZxb и AxXxhYx‘hZxh сона- правлены.
С учетом (6) и (7) выражение для кинетической энергии верхнего элемента штанги можно записать как
^is = |р1в?12 + ^^ ("М? + J^ ) + ю1^ (mXBqx
+ JY* ) + ^ {m^+J . ) 'IB ZXH ZXB ■
„• co . to . J . . ю . co . J . « co . ю.
X\B4B XXH YXH YXBZXB YXH ZXH ZXBXXB ZXH XXH
Полная кинетическая энергия штанги равна со QmXBqx-\-J . +J . ) + to. (mXBqx+J . +J . ) + ® • (jnXBqx +J . +J . ') + mXBqx XXH XXB XXH______YXH 1 YXH______ZXH 1 ZXB ZXH_________
®Y* ^ X* Y* ^ ^X* Y* ®Y* ®7* ^Y*7* ^ ^7* ^—®7* ® Y* ^ 7* Y* X*
Х\н YXH XXBYXB XXHYXH YXH ZXH YXBZXB YXHZXH ZXH XXH ZXBXXB ZXHXXH
Аналогичные выражения должны быть составлены для каждой штанги механизма.
Для определения проекций угловой скорости на оси системы координат AXXXHY*HZXH можно использовать следующие кинематические уравнения:
®xtH"^H^yXH ; со . =У\н\ со . = ^ sin/w . (9)
Л\Н чн £\н
Уравнения (9) выводятся аналогично кинематическим уравнениям Эйлера [5] при условии, что поворот штанги в двухстепенном шарнире А] рассматривается как совокупность двух последовательных поворотов: вокруг связанной со штангой оси АхХхн на угол 9ХН , вокруг связанной со штангой оси AXYXH на угол /ш.Углы SXH и ухн определяют пространственную ориентацию системы координат AxXxhYxhZxh относительно некоторой неподвижной системы координат. Пусть в качестве неподвижной выступает система координат AxXxhYxhZxh . При решении задач кинематики для заданных значений обобщенных координат q, могут быть определены координаты (х™н, у™н ’ Z™H ) точки Схн (или любой другой точки, принадлежащей нижнему элементу штанги и лежащей на оси AXZXH) в этой неподвижной системе координат. Так как пересчет координат при развороте систем координат на углы дхн и ухн описывается произведением
Хсхн =s*n/i//|^1Сш|; Усхн ^-siniS]^ со5/]Я lA^i^l; yCw =cosSXH cosyXH |AjCw|, откуда получаются два простых выражения для определения углов SXH и ухн по известным координатам точки Схн:
„НП _
У\н = агс8ЮТГ7^7; ^н = arctg—.
(Ю)
ZCXH
Продифференцировав (10) по времени:
НП -НП _ НП -НП
/, _ ХС\Н Q _ZcAH^C\H Усхн2СХН а с 1-х™ у
ХСхн УСи Чн можно переписать выражения (9) как функции от координат точки Схн :
,™ ..НП _ НП -НП „ _ 2схнУсхн ^С\Н ZC\h со • — : 5
Х\н НП 2 НП 2
Усхн *zcXH
1-
X™ ХСХн
хнп ХС\н
; “V = "'ГЛ.....
™ пас 12-х™ уН-гин! xCw
НП -НП _ НП -НП
0) , г\н
ХС\Н
(П)
у"?„2«™„2 1А'С“1'
Выражения (11) входят в уравнение (8) кинетической энергии штанги. При составлении уравнений Лагранжа 2-го рода потребуется дифференцирование (8) по обобщенным координатам и скоростям. Координаты (х™ , у™н , z™H) , входящие в (11), являются функциями обобщенных координат q, , однако получение этих функций в явном виде затруднительно. Поэтому целесообразно представить проекции угловой скорости в следующем виде:
8ю. дсп. 8®.
tox*XH = 5~^-’ Х = ®zXH а уравнения (11) использовать для численного определения частных производных угловых ско-дсох. 8®у. 8юг.
ростей---—,---—,---—. При этом координаты и скорости, входящие в (11), определяются
8q, Sq, 8q, численно при решении прямой задачи кинематики как функции обобщенных координат q,.
Кинетическая энергия Тпп подвижной платформы как абсолютно твердого тела будет определяться следующим образом:
m _ грЦ.М , прВр
1ПП ~1ПП ^ПП’ где Т^ - кинетическая энергия движения центра масс подвижной платформы в предположении, что в нем сосредоточена вся масса платформы; Т^ - кинетическая энергия вращения платформы вокруг центра масс. Аналогично (5) можно записать:
тЦ-м I2
^ПП - ^nnVCnn! ’ где mnn - масса платформы; vCnn - скорость центра масс платформы. Величину |тСда | целесообразно выразить через обобщенные координаты qe следующим образом:
i?c>z^,=z:%L («I где модуль радиус-вектора центра масс подвижной платформы УСпп | определяется через координаты центра масс (хСпп, Успп, 2спп) в нек0Т0Р°й неподвижной системе координат, например, OXYZ: ^гСпп | = ^х^пп + у1-пп + z^nn . Входящие в (12) частные производные находятся из решения задач кинематики. При моделировании координаты (хСпп, уСпп, zc ) можно принять в качестве выходных координат механизма.
Свяжем с подвижной платформой систему координат CnnX'Y'Z' (см. рис. 1), такую, что ее оси являются главными осями инерции платформы. Если известны компоненты тензора инерции подвижной платформы в точке Спп относительно осей этой системы координат, то аналогично (3) можно записать, что
J , ю1, +J, ю2, +J, ®2, уВр _ х'пп Х'пп Y'nn Y'nn Z'nn Z'nn nn 2 > где проекции вектора угловой скорости могут быть определены в виде
® X'nn
а® , а® ,
R™q. ’ ®Y. = ’03г dq j Y пп у dq/ z пп
a®
Для определения частных производных в (13) можно использовать кинематические уравнения Эйлера [5]:
юх'пп ”Фпп
s™
^пп
sin^ пп +
9ПП
cos
српп; юу.пп =i//nnsm9nncos nn -9nns"m nn;
®z’nn ~^пп С08^лл +Фпп где углы прецессии у/пп, нутации Эпп и чистого вращения фпп определяют разворот системы координат CnnX'Y'Z' (соответственно, разворот платформы) относительно осей некоторой неподвижной системы координат, например, OXYZ. При моделировании целесообразно принять эти углы в качестве выходных координат механизма; связь этих углов с обобщенными координатами определяется из решения задач кинематики.
Полная кинетическая энергия элементов механизма равна Т^ = 5^^+^7л >где z = l,6.
Найдем производные кинетической энергии, необходимые для записи уравнений Лагранжа:
ay _ у ат, атпп 8^ ^ 8q j Bq j
= qjT4miB*mnn
STcnn aq.
IV^™!^;
d dT^ _
dt Bq
d . 4.
= д qj4m‘B+m,
д гсял Лд гс .
9q,
Bq,
Bq,
■пп
5|гг I 6 gif I lymzl V^ l£mz| "
q.;
BTy ar aq, ^aq.
am 6 B®„. 6
aq, ^ ^ XiH eq, tl
6 3®.
xiH
Sq»
qn+miBqj £
6 a® .
XiH
-|2
qn
a®v. t + (miBq^J . +J.
6 a®.
”1 YiH
6 а®. qn+^iBqj ^-x^qn
-12
1 а®.
6 а®.
м 8qiX
q^m^qj ^
6 a®.
2Ш SqiX
- 2
9,1 Y* Y* Y* V* xiBY,B XiHYiH
a®.
xiH у aq, h
6 a®.
YiH
Sqn
9,1
814 4^X1, „
&1, IS &,« "
+ VY* 7* "*" JY* 7* ^
YiHzm Qq
а®. 6 а®.
У,н у ZiH. м aqn
dm. 6 a®.
aq.
YiH
q^ + У
ziBxiB ziHxiH
x
a®. 6 a®.
ZiH у XiH 8q, 8qiXn
аю. aq.
6 a®.
a® , ' X’nn x'nn dq
6 a®
a®
Г Y'nn rnn dq.
6 a®.
X
Y’nn
a®.
Sqn
9,1 + J.
2'nn
z'nn Bq
6 a® C ^ пп
8qn
qt\-
Смирнов В.А., Петрова Л.Н. Динамическая модель механизма___________________________________________________________с параллельной кинематикой
Обобщенные силы Q(, присутствующие в рассматриваемой динамической системе, определяются активными силами в приводах, силами веса элементов штанг и подвижной платформы, а также некоторой внешней силой, например, силой резания.
Пусть внешняя сила Рвн приложена в точке Свн (см. рис. 1) с координатами (х'вн 1 Увн 1 z'bh ) в связанной с подвижной платформой системе координат С nnX'Y’Z' ; направление действия этой силы определяется направляющими косинусами 1ВН, твн, пвн в неподвижной системе координат, например, OXYZ . Элементарная работа этой силы равна скалярному произведению вектора силы на изменение радиус-вектора точки Свн ее приложения: ЗАВН= ^вн ' ^свн • Если изменение радиус-вектора точки Свн вызвано изменением обобщенной
координаты qx, то можно записать:
Ж _(9хвн 7 , ^вн , 9z.
Свн "" ^Свн иУсвн №свн -
5^1
где i , j, k - единичные векторы системы координат OXYZ ; частные производные по обобщенной координате рассчитываются с использованием уравнений кинематики. Элементарная работа в этом случае равна:
SABH - Zj
i ®xbh , 9yBH 8zBH
BH - + mBH - + "BH a
5?i d^i 5qx
что позволяет записать составляющую обобщенной силы ^, определяемую внешней силой:
^_РВН О h
' ®хвн , ™ 8увн dzBH
ВН - +тВН - + ПВНЕШ а
9q\ oqx oqx
Ip I
\ГВНЕШ | '
Составляющая обобщенной силы Qx , определяемая силой веса подвижной платформы, запишется следующим образом:
8zCmi й Рпп = -Х^™пп8,
-
- ™ oqx
где zCnn - соответствующая координата центра масс подвижной платформы в неподвижной системе координат OXYZ ; g - модуль ускорения свободного падения.
Составляющие, определяемые силами веса элементов раздвижных штанг, равны: gz™ qz™ _
61 Рпп й Рпп =-Х^т>в8. z = l,6,
-
- oqx ~ oqx
где частные производные рассчитываются для координат соответствующих центров масс в любой неподвижной системе координат, оси которой сонаправлены осям OXYZ.
Выражение для j-Й обобщенной силы примет следующий вид:
г 9хвн , ^Увн , вн а+ твн + пвн 8q, 9q.
^ВН
dq
вн
^ пп V ^j
т,
« 94j
где Р} - активная сила, соответствующая j-й обобщенной координате.
Активные силы могут задаваться через статические Р, = PCTjQu pqpq ^ или динамические TjPj + Р, = PCTJ (и}, q}, q}) характеристики приводов [6], где и3 - управляющее воздействие, т} - постоянная времени привода.
Полученные выражения для обобщенных сил и производных кинетической энергии после подстановки в (1) позволяют получить 6 (по числу степеней свободы) дифференциальных уравнения 2-го порядка, описывающих динамику рассмотренной системы.
Список литературы Динамическая модель механизма с параллельной кинематикой
- Обрабатывающее оборудование нового поколения. Концепция проектирования/В.Л. Афонин, А.Ф. Крайнев, В.Е. Ковалев и др.; под ред. В.Л. Афонина. -М.: Машиностроение, 2001.-256 с.
- Манипуляционные системы роботов/А.И. Корендясев, Б.Л. Саламандра, Л.И. Тывес u др.; под общ. ред. А.И. Корендясева. -М.: Машиностроение, 1989. -472 с.
- Bulca, F. The kinematics and workspace analysis of platform mechanisms: a thesis submitted to the Faculty of Graduate Studies and Research in partial fulfilment of the requirements for the degree of Doctor of Philosophy/F. Bulca. -Montreal: Department of Mechanical Engineering McGill University, 1998.
- Смирнов, B.A. Алгоритм управления механизмом с параллельной кинематической структурой/В.А. Смирнов, В.Б. Федоров//Вестник ЮУрГУ. Серия «Машиностроение». -2005. -Вып. 7. -№ 14 (54). -С. 23-27.
- Бухгольц, H.H. Основной курс теоретической механики (часть вторая)//H.H. Бухголъц. -М.: Наука, 1972.-332 с.
- Коловский, М.З. Динамика машин/М.З. Коловский. -Л.: Машиностроение. Ленингр. отд-ние, 1989. -263 с.
