Динамика неустойчивых решений волнового уравнения с источниками

Бесплатный доступ
Получены два новых точных решения волнового уравнения с источниками. Изучена динамика неустойчивых состояний, описываемых этими решениями. Даны аналитические выражения частных производных искомой функции по пространственной координате и времени на плоскости независимых переменных «искомая функция - время». Такая структура решения позволяет рассмотреть нестационарные аналоги автомодельных кинков, описывающих переход между двумя состояниями равновесия системы «среда - источник». Для классического волнового уравнения применяется нелинейный реономный источник, поведение которого влияет на свойства релаксирующего кинка. Определены условия, при которых скорость перемещения сформировавшейся автомодельной волны переброса дозвуковая либо сверхзвуковая. Обнаружена важная роль величины скорости точки перегиба неавтомодельного кинка; вычислено пороговое значение этой скорости, разделяющее дозвуковой и сверхзвуковой режимы. Неустойчивый вариант представленного решения дает сильный разрыв искомой функции при неограниченном росте времени. Предвестником сильного разрыва является остановка точки перегиба кинка. Указана оценка величины момента времени, предшествующего началу возвратного движения точки перегиба. Дано решение пространственно нелокального волнового уравнения четвертого порядка с двумя аддитивно входящими источниками. Один источник линейным однородным образом зависит от искомой функции, второй - линейно зависит от модуля градиента искомой функции. Решение представляет собой аналог волны переброса в интервале с нестационарными границами. В каждый конечный момент времени это решение непрерывно, а за бесконечное время происходит потеря гладкости решения - имеем так называемый «медленный взрыв». В неустойчивом варианте решения изолинии искомой функции на вогнутом участке (нижняя часть кинка) движутся навстречу выпуклому участку, который примыкает к верхней границе кинка. В устойчивом варианте кинк вырождается в однородное состояние. Обнаружено, что для неавтомодельного процесса инверсия знака градиентного источника дает инверсию условий устойчивости кинка и антикинка. Неустойчивому кинку/антикинку соответствует градиентный сток/источник.
Волновое уравнение, нелинейный источник, нелокальность, неавтомодельный кинк, дозвуковая и сверхзвуковая волна,
Короткий адрес: https://sciup.org/147234118
IDR: 147234118 | УДК: 517.9 | DOI: 10.14529/mmph200406
Dynamics of unstable solutions for the wave equation with sources
Two new accurate solutions of the wave equation with sources are obtained. The dynamics of unstable states described by these solutions is studied. Analytical forms are given for the partial derivatives of the required function with respect to the spatial coordinate and time on the plane of independent variables “the required function - time”. This structure of the solution allows us to consider nonstationary analogs of self-similar kinks describing the transition between two equilibrium states of the “medium - source” system. For the classical wave equation, a nonlinear rheonomic source is used, the behavior of which affects the properties of the relaxing kink. The conditions under which the speed of movement of the formed self-similar transfer wave is subsonic or supersonic are determined. An important role of the velocity of the inflection point of a nonselfsimilar kink has been analyzed; the threshold value of the velocity is calculated, which separates the subsonic and supersonic regimes. An unstable version of the presented solution gives a strong discontinuity of the required function with an unlimited increase in time. The stopping of the kink inflection point is an indicator of a strong rupture. An estimate of the value of the moment in time preceding the beginning of the return motion of the inflection point is indicated. A solution to a spatially nonlocal fourth-order wave equation with two additively entering sources is given. One source depends on the desired function in a linear homogeneous way; the second one depends on the modulus of the gradient of the desired function the same way. The solution is an analog of an overthrow wave in an interval with non-stationary boundaries. At each finite moment of time this solution is continuous, and for an infinite time there is a loss of smoothness of the solution, we have the so-called “slow explosion”. In the unstable solution, the isolines of the sought-for function on the concave section (the lower part of the kink) move towards the convex section, which is adjacent to the upper boundary of the kink. In the stable version, the kink degenerates into a homogeneous state. It has been analyzed that for a nonselfsimilar process, the inversion of the sign of the gradient source gives an inversion of the stability conditions for the kink and antikink. An unstable kink/ antikink corresponds to a gradient sink/source.
Текст научной статьи Динамика неустойчивых решений волнового уравнения с источниками
Введение. Волновые уравнения с линейными и нелинейными источниками (уравнения Клейна–Гордона) относятся к числу фундаментальных уравнений математической физики и позволяют моделировать сложные явления в различных областях естествознания. Задача исследования нелинейных волн - важный элемент динамической теории неравновесных состояний теплофизических, физико-химических и биологических систем [1-3].
Классическое волновое уравнение с источником возьмем в виде
д2т д2т _
д12 д(х')2 ~ U ’ где т - функция, характеризующая некоторое физическое свойство среды; t - время; x - декартова координата; w - скорость распространения малых возмущений; х' = x/w; ки = ки (т,t) - функция источника. Например, в терминах теории теплопереноса т - температура, функция ки (т,t) ха рактеризует источники и стоки энергии. Учет пространственно нелокальных эффектов переноса приводит к повышению порядка модельного уравнения (1):
д2 т д2 т 2 д4 т kи .
д t 2 д ( x' ) 2 д ( x' ) 4
Здесь х2 — Xi W4, а величина exl есть параметр слабой нелокальности задачи, см. [4] и указанную там библиографию. Для уравнения (2) мы рассматриваем источник ки = кUt + Qg |дт/дx'|; кU, Qg — const, (3)
который зависит от модуля градиента искомой функции и в этом смысле является нелокальным. Для размерных и безразмерных уравнений берём одинаковую форму записи, применяя масштабы т b и t b :
( т/т b W т , ( tlt b Н t , [ х / ( wtb ) ]^ X ', [ ( k U t 2 ) /т b ]^ k U ’
[ e%2/ ( w 4 t b ) ]^ ( ex2 ) , ( k U t b ) ^ k U , ( Qg t b ) ^ Qg .
Изолиния т ( x ', t ) — T i — const перемещается со скоростью N — dx/dt , которая является дозвуко-вой/сверхзвуковой, если M — dx '/ dt — N / w , соответственно, меньше/больше единицы. Предпосылки данной работы состоят в следующем:
-
1. Для волновых уравнений принципиальное значение имеют кинк-решения, описывающие переход между двумя состояниями равновесия системы «среда–источник». Известные в литературе решения типа «кинк» наиболее подробно изучены для уравнения синус-Гордона [1, 2]. В настоящее время в различных областях физики возникает интерес к волновым уравнениям, содержащим нелинейные реономные источники, которые зависят явным образом не только от искомой функции, но и от времени [5-7]. Такие функции источников позволяют моделировать разнообразные режимы воздействия на скорость и направление движения волны.
-
2. В динамике нелинейных нестационарных физических процессов важная роль принадлежит задаче построения и описания решений, разрушающихся за конечное время. Обзор работ, относящихся к параболическим уравнениям, представлен в [8, 9]. Условия разрушения и устойчивость решений нелинейных гиперболических уравнений рассмотрены в [10-13]. Еще один аспект этой проблемы - анализ потери гладкости решения за бесконечное время («медленный взрыв») [14].
Цель данной статьи - представить примеры точного аналитического описания неавтомодельных кинков и указать их нетривиальные свойства, проявляющиеся при долговременном взаимодействии среды с источником.
Преобразование независимых переменных. Уравнение (2) запишем в виде системы дифференциальных уравнений:
дv д20 , „ 2 ди дud
---=к к„, О — т+ ех —, — = —, д t д( Х' )2 дх' д tд дт дт , , .,
-
и — —, v — —, d т — udx + vdt .
д x '
Выполним в (4) преобразование независимых переменных ( x ', t ) ^ ( т , t ) :
дvд ди дО д^О 1 ,
+ и — кU, дт дт дт2 J
--+ v--и д t дт л 2 ди
О — т + ех и—, дт ди ди дv
--+ v— — и— . д t дт дт
Здесь D ( т , t )/ D ( x ’, t ) = д т/d x ' ^ 0 . Изолиния т = т i имеет скорость
M = dx У dt = - v ( T i , t ) / и ( т , t ) . (8)
Обсудим точные частные решения системы (5)–(7). Для краткости изложения в основной части текста применяется единый термин «кинк», т. е. мы не делаем терминологического различия «кинк»/«антикинк» между профилями, обладающими положительным/отрицательным наклонами дт/d x ' и перемещающимися вправо вдоль оси x ' . Отдельное упоминание антикинка делается там, где он обладает свойствами, отличающимися от свойств кинка.
Классическое волновое уравнение: релаксация кинка. Для уравнений (5)-(7) при в = 0 рассмотрим источник kuи = Qo + вОх, в = exp(rt) , r - const, который явно зависит от времени и при r < 0 релаксирует (t ^ го, в ^ 0) вдоль каждой изолинии т = т : в установившемся по времени состоянии имеем к^ (т, t ^го)^ Qo (т). Вид функций Q0 (т), Q1 (т) будет определен далее в ходе построения решения. Применяя зависимости и = uo (т) + 01^ (т) , V = vo (т) + 0V (т) , находим v0 = -иоMо , Mо - const; V = ±и1;(10)
и о Uo (Mо2 -1) = Qo (т);(11)
+2Uoui (Mо ± 1) = О±(т);(12)
(и1 /и1 ) = (ио /ио) + [r/uо (Mо ± 1)] .
Точка над символом функции означает дифференцирование d / d τ; M 0 – произвольная постоянная, далее для определённости полагаем M 0 > 0; расположение знаков «±» в (12), (13) соответствует формуле (10). Выбор знака «±» влияет на вид реономного источника; суть основного результата вычислений для обоих знаков одинаковая; далее берем в (10) и (12), (13) верхний знак: v 1 = и 1 ,
Q + = Q 1 . Структура соотношений (10)-(13) позволяет задавать априорно функцию и о ( т ) и получать физически содержательные зависимости Оо ( т ) , Q 1 ( т ) . Рассмотрим частный пример:
ио (т) = Ьо (т2-т2), т > о, т е(-т1,т1); b0, Т1 - const.(14)
Отсюда находим и1 (т) = (С1 /т2 )(т1 + т)1+Л1 (т1 - т)1 Л1, С1 - const,(15)
А1 =(- r )/[ 2Ьот1 (Mо +1)],(16)
Оо (т) = Оот(т2 - т2),(17)
Q1 (т) = QV^ + т)1+Л1 (т1 -т)1-Л1.(18)
Параметры источника Q 01 , Q 11 связаны с константами b 0 , С 1 , М 0 формулами:
о о = 2 b 2 ( M о 2 - 1 ) , Q 1 =- 4 Ь о C 1 ( M о + 1)/ т 2 , Ь о C 1 < о.
Для Ai в (16), (18) возможны два варианта: Л1 е(-1,-Ло)с(-1,о) и Л1 е(Ло,1)с(о,1), и при этом функции Оо (т), Q1 (т) обращаются в ноль в точках т = 0, т = ±т 1. Величина Ло е(о,1) бу- дет указана в ходе дальнейших вычислений. Выражения (9) и (14), (15) определяют неавтомодельный аналог волны переброса (кинк) между состояниями системы при τ = ±τ1:
и = и о
Ьо т 2 I т 1 - т J
в
При т = 0 начальный профиль кинка u (x',t = 0) = u0 + и1. x'е (-да,да) имеет наклон и (т = 0,t = 0) = С1 - Ь0т2. (20)
Кинк релаксирует в автомодельное состояние (бегущую волну) вида и = и 0 (т), v = - и 0 M0, т = т(x'-M01), где M0>0 - безразмерная скорость этой волны. В отрелаксировавшем состоянии знак наклона кинка и 0 (т = 0) = -М2 (21)
остается неизменным именно при Ь0С < 0. Выполнено неравенство [ и (т = 0, t = 0)/ и 0 (т = 0 ) ] > 1, характеризующее отношение наклонов кинка в начальном и конечном состояниях.
Обсудим свойства источника. В начальный ( t =0) момент времени нелинейный реономный источник ky = Qo + PQy определяется суперпозицией функций (17) и (18); в установившемся по времени автомодельном режиме действует нелинейный источник Q 0 ( т ) . Эта функция имеет экстремумы (максимум и минимум) при т = т т , где т т = т ^ ,3 ; кроме того, справедливо выражение т = 0, dQ 0/dr = 2 Ь 2 т 2 ( 1 - M 0 2 ) .
Функция Q 1 ( т ) имеет экстремумы (максимум и минимум) в точках
= 1 (аЛ 'JA—) .
и при этом верна формула т = 0. dQ1 Цт = -4Ь0С,(1 + M0)>0.
Отметим расположение экстремумов, выбор знаков констант b 0. С 1 и поведение производной TQ 1 ^тт . Если А , е ( - 1, -А 0 ) , то Ь 0 < 0. C , > 0.
- т 1 < 42 <(-т т ) < 0 . 0 < ^ < т т < т 1 ;
т = -т1. (TQ1 ^тт)^да; т = т1. dQ1 Цт = 0.
Если А 1 е ( А 0,1 ) , то Ь 0 > 0. С 1 < 0.
-
- т 1 <(-т т ) < т т 2)< 0 . 0 < т т < ^ < т 1 ; т = - т 1 . TQ 1 Цт = 0; т = т 1 . ( TQ 1 Цт ) ^да .
В качестве входных параметров задачи возьмем: 1) размер интервала (-т1,т1), в котором существует волна переброса; 2) наклоны кинка в начальном (20) и отрелаксировавшем (21) состояниях - знаки этих наклонов должны быть одинаковые; 3) отношение наклонов функции источника dQ^) = a0 = Ь (M0 - 1)т2/(2C1).
-
V dQ 1 / Т т )т = 0
Тогда параметры решения подсчитываются по формулам:
Ь 0 = - и 0 ( т = 0 )/ т 1 . С = и 1 ( т = 0 ) . M 0 - 1 = 2 а 0 С^ ( Ьо т 1 ) .
Следовательно, скорость бегущей волны сверхзвуковая при а 0<0; в этом случае между функциями Q 0 ( т ) и Q 1 ( т ) имеется конкурентное взаимодействие, которое завершается формированием сверхзвуковой волны переброса, M 0>1. Если 0 < а 0 < [ и 0 ( т = 0)/2 и 1 ( т = 0 ) ] , то конкуренция отсутствует ( Q 0 Q 1 > 0 ) , и процесс завершается формированием дозвуковой бегущей волны, M 0 е ( 0,1 ) . В ходе дальнейшего анализа будут указаны оценки начальной скорости точки перегиба кинка, при которых автомодельная волна является дозвуковой либо сверхзвуковой. Перечисленные качественные свойства источника при А 1 е ( А 0,1 ) показаны на рис. 1. Иллюстрация варианта А 1 е ( - 1, А 0 ) по своему физическому содержанию аналогичная и здесь не приводится.
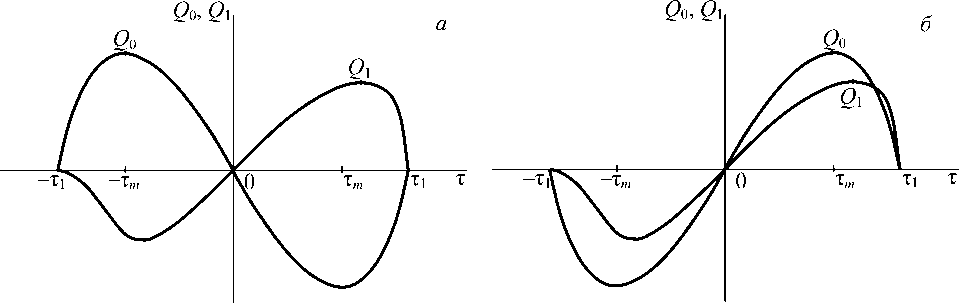
Рис. 1. Функции источника k и = Q 0 + в Q 1 : а - сверхзвуковой вариант M 0 > 1; б - дозвуковой вариант 0 < M 0< 1
В точке перегиба релаксирующего кинка x' = x'у ( t ) условие д^т, д ( x ') 2 = 0
дает уравнение
ди/дт = 0, определяющее функцию т = т f ( t ) :
Tf =
А 1 т 1 A f
1 + A f
Af =
- С в Ь 0 т 12
f т1 + тf
A Ai
l т1 - т J
dтf r4 (А1т1 - Ч )(т12 - т2)
dt Ат (тf — 2тf Ат + т )
Рассмотрим скорость dx*/ jdt = M f точки перегиба:
M f + 1 =
dт f , х / \ —1
+ ( M 0 + 1 ) и 0 т ) И f ,
u f
= и 0 (тf) + PU1 (тf ) .
Если А1 е(—1, —А0), то тf < 0, dтf/dt > 0, и0 (ту )> 0, Uу > 0, А1т1 < тf < 0 ; напомним, что здесь b0 < 0, C1 > 0. Если А1 е(А0,1), то ту > 0, dтf/dt < 0, и 0 (ту )< 0, uf < 0; 0 < тf <А1т1, b0 > 0, C1 < 0. Таким образом, для всех допустимых значений A1 имеем
0 <( и 0/и )^. < 1, и -1 (dтf/dt )> 0, А1тf > 0, ^тf /(Ат — тf )J> 0 .
В установившемся по времени состоянии получаем:
t —— ^ , A f —— 0, т у —^ 0, ( d т f d dt ) — — 0, M f —— M 0 .
Формулу (23) запишем в виде
M f +1 7 XX
——-=R2 (п); п=ту/(А1т1), 0 < п <1, м 0 +1
R2 (п) = (1 — п)[( VА2 ) — п2 ]/[п2 — 2п + (VА2 )] .
Пусть в начальном состоянии точка перегиба имеет некоторую скорость M f = M f > 0, и при этом п = п 1 = т f ( t = 0 )/( А 1 т 1 ) , где т 2 ( t = 0 ) < т 2 . Обозначим R 2 = R 2 ( п = п 1 ) и укажем условия, при которых решение имеет физический смысл. Расчеты показывают, что А 0 = 1/ V2, а значения параметров n 1 , A 1 должны удовлетворять неравенствам
0<щ <(1 -^(1/A2)-1), (12)<а2 < 1, которые приводят к оценке R2 > 1. Дозвуковая волна М0 е (0,1) существует, если
R 1 2 < ( 1 + M f ) < 2 R 2 . (25)
Сверхзвуковая волна M0 > 1 существует, если 1 + Mf > 2R12 . Следовательно, исходное допуще ние M0 > 0 будет выполнено, если начальная скорость Mf точки перегиба превосходит пороговое значение (R12 -1) > 0 . Еще одно пороговое значение, а именно: Mf = 2R12 -1 разделяет дозвуковой и сверхзвуковой режимы движения автомодельного кинка. Отметим, что в формуле (24), дающей зависимость Mj = Mj (7), аргумент 7е(0,71 ] изменяется от начального значения п1 в сторону меньших значений, п ^ (+0).
Возвратное движение точки перегиба. До сих пор мы рассматривали устойчивый ( r < 0) режим релаксации кинка. Обсудим теперь неустойчивый процесс, происходящий при r > 0. Все формулы решения остаются без изменения, но, согласно (16), требуется поменять знаки констант b 0 и C 1 ; знак произведения этих констант по-прежнему отрицательный. При А 1 е ( А 0,1 ) нужно взять b0 < 0, C 1 > 0 ; при А 1 е ( - 1, -А 0 ) нужно взять b 0 > 0 , C 1 < 0. Из этого следует, что при r >0 и r < 0 различаются знаки наклона кинка: см. (20), (21). Вид функций источников (17), (18) и процедура задания начального состояния системы «среда - источник» полностью сохраняются. При r > 0 имеем неустойчивое решение (9), (19); вдоль каждой ненулевой изолинии т = т i источник с течением времени ( t ^ го, в ^ ю) становится неограниченно большим. Проанализируем поведение точки перегиба кинка. Пусть в начальном состоянии (в = 1) имеем п = п 1 , M f- = M f > 0. Отличие от устойчивого режима r < 0 в том, что теперь аргумент 7 е [ 7 1 ,1 ) увеличивается от своего начального значения и стремится к 1 слева, см. (22), (24). Формально это означает, что результатом пространственно-временной эволюции кинка является сильный разрыв функции т ( x ', t ) в точке x ' = 0. На разрыве функция изменяется скачком от (-т 1 ) до т 1 . В физическом отношении целесообразно рассматривать неустойчивый процесс на конечном интервале времени, предшествующем остановке точки перегиба. Запишем (24) в виде
M f = ( M 0 + 1 ) R 2 - 1.
Здесь M f = M f ( 7 = 7 1 ) > 0, M j ( 7 ^ 1 ) ^ ( - 1 ) < 0. Таким образом, для непрерывной функции M f ( 7 ) существует конечный момент времени t = t * < го , 7 * = ^ т j ( t * )/( А 1 т 1 ) ] < 1, когда скорость точки перегиба равна нулю: M f- ( 7 = 7 * ) = ( M 0 + 1 ) R 2 ( 7 = 7 * ) - 1 = 0. При t > t * происходит возвратное движение точки перегиба, являющееся предвестником сильного разрыва.
Нелокальное решение. Для нелокального уравнения (2), преобразованного к системе (5)(7), кинковое решение строим в виде
-
— = Г в , u = t U ( — ) , v = t V ( — ) , в = exp ( rt ) . (25)
В этом случае функция источника (3) представляется формулой k и = t Q ( — ) , где Q ( — ) подсчитывается посредством U ( — ) . На основе (25) получаем
0 = t ( 1 + ex 2 5 ) , 5 = U ( U + — U ) ,
5 0/ S t = 1 + ex 2 ( 5 + — 5 ) ,
-
V ( v + — V ) - r — V - U ( U + — U ) | 0 - ex 2 U 2 — d- ( 5 + — 5 ) = Q ( — ) , (26)
Г —
V = r - M 0 U , M 0 = const. (27) Здесь точка над символом функции означает дифференцирование d / d ξ. М 0 – произвольная постоянная, являющаяся параметром начального состояния кинка. Нетрудно видеть, что М 0 есть безразмерная скорость линии ξ = const. Далее берем для определенности M 0 > 0. При r = 0 получаем бегущую волну т = т ( x ' - M 0 t ) . Уравнениям (26), (27) удовлетворяют следующие функции:
U 2 = ( A 2 Д2 ) - A 2 , 5 = - A 0 = const,
Q ( ^ ) = k U - 2 rM o U , к U = r 2 - A 02 ( M 22 - 1 + ex 2 L ) . (28) Отсюда находим
U = ±(A2в - V.:2 )V2,\A, (29) где А0, А1 – положительные постоянные. В данном решении мы рассматриваем вариант т C ( ^w,тw), тw =( All A0 ) exp (rt) , Al > A0Tw (t = 0)> 0 . (30) Для случая (9 ^9x')> 0 берем в верхней части (т > 0) кинка знак «+» в (29), т. е. U > 0; в нижней части (τ < 0) берем знак «–», т. е. U < 0. Тогда для кинка имеем u = дт/ 9x' = (Al в - A2T2 )12, Qg = -2 rM0. (31) Аналогичным образом нужно действовать при (9 А9x') < 0. Параметры источника к11, Qg связаны с параметрами решения А0, А1, r, M0 формулами (28), (31). Точка перегиба кинка τ = 0 движется со скоростью M0. Таким образом, имеем аналог волны переброса в интервале с нестационарными границами: (дт/9x')^ 0 при т ^±тw(t).
Рассмотрим верхнюю часть кинка, т е [ 0, т w ) . Скорость перемещения изолинии т = т i > 0 равна
M i ( t ) = M 0 - ( т /A/ )( A i 2 в - A ^ ) - 1 2 . (32)
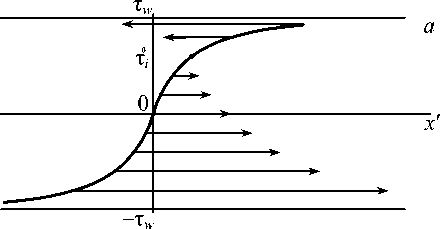
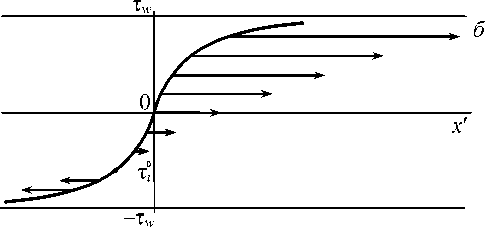
Рис. 2. Распределение скоростей изолиний в фиксированный момент времени t = t 1 ≥ 0: а – неустойчивый вариант; б – устойчивый вариант.
Черным кружком отмечена неподвижная изолиния, стрелка указывает направление движения
Возьмем любой конечный момент времени t = 11, 0 < 11 < да, обозначим т, = 8iтw(t1) и получим Mi (ti ) = M0-(r 8 J A )(1 - 82 )-12, где 8i e( 0,1) - номер изолинии. Пороговое значение
8 0 = M 0 A 0 ( r 2 + M 0 2 A 2 ) - 1 2 (33)
относится к неподвижной изолинии. Отрицательные скорости имеют изолинии, находящиеся в конечной окрестности верхней границы т = т w ( t ) > 0, т. е. здесь 8 , е ( 80,1 ) . Изолинии т i > 0, обладающие положительными скоростями, располагаются непрерывным образом на двух участках:
1) в конечной окрестности точки перегиба т = 0, движущейся с положительной скоростью M 0 >
0, а именно: 5i е(о,50); 2) во всей нижней части кинка, т ^(-тw,0], т, =- 5t Tw (ti )< 0, 5, е( 0,1), Mi (ti ) = M0 +(r 5, /A )(1 - 52 )—1
Вогнутый участок движется с положительной скоростью навстречу той части выпуклого участка, что примыкает к границе t = Tw, рис. 2, а. Такое состояние - неустойчивое, и оно влечет за собой монотонное неограниченное расширение при t>t1 границ интервала (-Tw, Tw). Из (32) и (33) следует, что в момент времени t = t* > t1 обращается в ноль скорость изолинии 5irw (t1): в* = в5zК0, 5z е(б0,1), в = exp (rt1), в* = exp (rt*). Чем ближе тi (со стороны больших значе ний) к ri0 = 50 Tw (t1), тем быстрее скорость Mi (t) принимает нулевое значение; при t > t* скорость этой изолинии становится положительной. Таким образом, при t > tx наблюдается непрерывный процесс перемены знака («минус» ^ «плюс») скорости изолиний. Вместе с тем существенно, что при t > t1 в области определения решения появляются новые изолинии, примыкающие изнутри к левой/правой границам интервала (-Tw, Tw) и имеющие, соответственно, положитель-ные/отрицательные скорости. В данном случае нет разрушения кинка из-за того, что интервал (-Tw, Tw) монотонно расширяется с течением времени: в каждый конечный фиксированный момент t е[0,t2), 0 < t1 < t2 <ж решение непрерывно, и наклон кинка, согласно (31), имеет максимум при т = 0. При t^да область определения решения стремится занять 1-й и 3-й квадранты на плоскости (x‘, т), и тогда x' = 0 - сильный разрыв. Следует обратить внимание на важное свойство нестационарного решения (25), (31): v = дт/дt = 0 при т = тj (t), где 0 < тj < rw,
^jhw ) = 50 .
Функция t = t ( x ', t ), в отличие от автомодельного кинка, немонотонная по отношению к аргументу t : при каждом фиксированном конечном x' она имеет максимум. Условие v (т j , t ) = 0 выполнено в верхней части кинка, причем ( д 2 т д t 2 ) < 0. Индекс j относится к функциям на линии (34): ^ j = т j / в = м 0 A 1/ ( Г 2 + м 2 A 0 ) 12 .
При r < 0 получаем устойчивый режим вырождения кинка в однородное состояние т = 0. Неподвижная изолиния т , = т0 = -д0т.х ( t ) находится в нижней части кинка: - т w < т j < т0 < 0. При т = т j ( t ) имеем v (т j , t ) = 0, ( д 2 т /5 t 2 ) > 0, т. е. для каждого фиксированного конечного x ' функция т=т ( x ‘ , t ) имеет минимум по отношению к аргументу t . Границы интервала (-т w , т w ) сближаются, потому что теперь выпуклый участок движется с положительной скоростью навстречу той части вогнутого участка, которая примыкает к нижней границе т = - T w , рис. 2, б . Кинк в ходе своей эволюции стремится распрямиться в линию т = 0: в ось x ‘ .
Остается указать роль источника в возникновении неустойчивости и дать последовательность расчета констант, содержащихся в построенном решении. Исходными являются параметры kU, Qg, а также величины тw (t = 0), A1 = и (т = 0, t = 0), определяющие начальное состояние кинка. Неавтомодельность решения (25), (27), (31) обусловлена именно воздействием градиентного источника Qg |u|, аддитивно входящего в (3): если Qg = 0, то r = 0, т. е. в = 1. Согласно (31), для кинка (дт/дx') > 0 знак r противоположен знаку Qg: имеем устойчивость/неустойчивость при положительном/отрицательном Qg. Для антикинка (дт/дx')< 0 наблюдается инверсия знаков: в этом случае Qg = 2 rM0, поэтому имеем устойчивость/неустойчивость при отрицатель-ном/положительном Qg . Итак, неустойчивому кинку/антикинку соответствует градиентный сток (Qg < 0)/источник (Qg > 0). Устойчивость автомодельных кинк-решений нелокального волнового уравнения (2) с полиноминальной по т нелинейностью источника рассмотрена в [15].
Порядок расчетов: из (30) получаем A0 = A1 ,tw (0). Далее применяем формулу Qg = 4r2M0 и исключаем M02 в выражении для k1υ , см. (28). Это дает биквадратное уравнение для r2, которое всегда имеет один положительный корень: вычисляем r и присваиваем ему знак, соответствующий знаку Qg, а затем определяем скорость точки перегиба M0 = ^QgД-2r)J > 0 . Роль параметра нелокальности среды £%
видна из следующих неравенств:
d( r2 }/d£s%2 )> 0,
d( M02 ^д(^£^22 )< 0.
Заключение. Получены точные частные решения типа «кинк» для волновых уравнений (1) и (2). Выполнен анализ неустойчивых состояний системы «среда – источник». Неустойчивый вариант решения (9) даёт сильный разрыв при t → ∞, а предвестником начала разрушения кинка служит возвратное движение его точки перегиба. Функция (31) представляет решение нелокального уравнения (2) с источником (3). Основной результат: инверсия знака параметра Q g приводит к инверсии условий устойчивости кинка и антикинка.
Список литературы Динамика неустойчивых решений волнового уравнения с источниками
- Додд, Р. Солитоны и нелинейные волновые уравнения / Р. Додд, Дж. Эйлбек, Дж. Гиббон, Х. Моррис. - М.: Мир, 1988. - 694 с.
- Табор, М. Хаос и интегрируемость в нелинейной динамике / М. Табор. - М.: Эдиториал УРСС, 2001. - 318 с.
- Жоу, Д. Расширенная необратимая термодинамика / Д. Жоу, Х. Касас-Баскес, Дж. Лебон. -Москва, Ижевск: Регулярная и хаотическая динамика, Институт компьютерных исследований, 2006. - 528 с.
- Алфимов, Г.Л. Нелокальное уравнение синус-Гордона: решения типа «кинк» в пределе слабой нелокальности / Г.Л. Алфимов // Нелинейная динамика. - 2009. - Т. 5, № 4. - С. 585-602.
- Аэро, Э.Л. Динамические задачи для уравнения синус-Гордона с переменными коэффициентами. Точные решения / Э.Л. Аэро // Прикладная математика и механика. - 2002. - Т. 66, Вып. 1. - С. 102-108.
- Закирьянов, Ф.К. Управление динамикой кинка модифицированного уравнения синус-Гордона внешним воздействием с меняющимися параметрами / Ф.К. Закирьянов, Л.В. Якушевич // Компьютерные исследования и моделирование. - 2013. - Т. 5, № 5. - С. 821-834.
- Аэро, Э.Л. Решения уравнений синус-Гордон с переменной амплитудой / Э.Л. Аэро, А.Н. Булыгин, Ю.В. Павлов // Теоретическая и математическая физика. - 2015. - Т. 184, № 1. -С.79-91.
- Самарский, А. А. Режимы с обострением в задачах для квазилинейных параболических уравнений / А.А. Самарский, В.А. Галактионов, С.П. Курдюмов, А.П. Михайлов. - М.: Наука, 1987. - 476 с.
- Фила, М. Системы «реакция - диффузия»: разрушение решений, возникающее и исчезающее под действием диффузии / М. Фила, Х. Ниномия // Успехи математических наук. - 2005. -Т. 60, вып. 6 (366). - С. 207-226.
- Богоявленский, О.И. Опрокидывающиеся солитоны / О.И. Богоявленский. - М.: Наука, 1991. - 319 с.
- Свешников, А.Г. Линейные и нелинейные уравнения соболевского типа / А.Г. Свешников, А.Б. Альшин, М.О. Корпусов, Ю.Д. Плетнер. - М.: Физматлит, 2007. - 734 с.
- Корпусов, М.О. Разрушение решений обобщенного уравнения Клейна-Гордона с сильной диссипацией / М.О. Корпусов // Известия РАН. Серия математическая. - 2013. - Т. 77, № 2. -С.109-138.
- Копылова, Е.А. Асимптотическая устойчивость солитонов для нелинейных гиперболических уравнений / Е.А. Копылова // Успехи математических наук. - 2013. - Т. 68, Вып. 2 (410). -С.91-144.
- Юдович, В.И. О неограниченном росте вихря и циркуляции скорости течений стратифицированной и однородной жидкости / В.И. Юдович // Математические заметки. - 2000. - Т. 68, Вып. 4. - С. 627-636.
- Шабловский, О.Н. Нелокальность и возникновение резонансов в динамике волн / О.Н. Шабловский // Фундаментальные физико-математические проблемы и моделирование технико-технологических систем. - М.: Янус-К, 2017. - Вып. 18. - С. 125-138.
