Динамика причаливания и стыковки космического робота-манипулятора с геостационарным спутником

Автор: Сомов Е.И., Бутырин С.А., Сомов C.Е., Сомова Т.Е.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4 т.24, 2022 года.
Бесплатный доступ
Рассматриваются задачи управления космическим роботом-манипулятором в процессе причаливания и стыковки с геостационарным спутником связи при стыковочном механизме класса «штырь - конус». Выполнен анализ динамики при вариации условий причаливания и представлены результаты компьютерной имитации.
Геостационарный спутник, космический робот, причаливание, стыковка, управление, динамика
Короткий адрес: https://sciup.org/148325300
IDR: 148325300 | УДК: 629.78 | DOI: 10.37313/1990-5378-2022-24-4-155-160
Dynamics of mooring and docking of a space robot-manipulator with a geostatioonary satellite
The control problems of a space robot-manipulator in the process of mooring and docking with a geostationary satellite are considered when docking mechanism of the “rod-cone” class. A dynamic analysis is carried out with changing mooring conditions and the results of computer simulation are presented.
Текст научной статьи Динамика причаливания и стыковки космического робота-манипулятора с геостационарным спутником
Современные геостационарные спутники связи (ГСС) имеют гарантированный срок активного существования до 17 лет. Для продления срока службы перспективных ГСС предусмотрено их обслуживание с помощью космических роботов-манипуляторов (КРМ), которые стыкуются с ГСС и обеспечивают стабилизацию формируемой конструкции в орбитальной системе координат (ОСК).
В системе управления движением (СУД) КРМ используются такие приводы: кластер гироди-нов (ГД) и электрореактивные двигательные установки (ЭДУ) на основе как плазменных, так и каталитических электрореактивных двигателей (ЭРД). Измерение координат движения КРМ выполняется бесплатформенной инерциальной навигационной системой (БИНС) с коррекцией
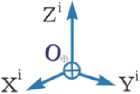
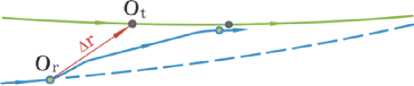
Рис. 1. Схема сближения КРМ с ГСС
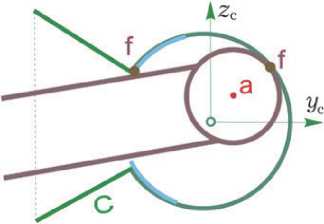
Рис. 2. Схема стыковки типа «штырь – конус»
сигналами от спутников GPS/ГЛОНАСС и звездных датчиков. При дальности до ГСС менее 100 м в СУД робота применяются также видеокамеры и лидары.
Вопросы выведения КРМ на геостационарную орбиту (ГСО) и его сближения с ГСС рассмотрены авторами [1-4], см. рис. 1 с траекториями перемещения центров масс спутника (цели, target) O t и робота (robot) O r в инерциальной системе координат (ИСК) O ⊕ X i Y i Z i . В данной статье исследуется динамика КРМ в процессе его швартовки (причаливания) и далее жёсткой фиксации к корпусу ГСС с применением стыковочного механизма (СМ) класса «штырь – конус».
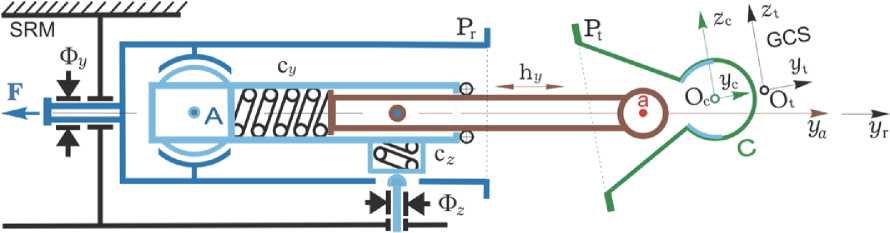
Рис. 3. Схема перемещения активного агрегата при швартовке КРМ к ГСС
ОПИСАНИЕ ЗАДАЧИ
Основы теории и техники стыковки космических аппаратов (КА) представлены в известной монографии В.С. Сыромятникова [5]. В рассматриваемом классе конструкций стыковки КА выделяются активный агрегат, содержащий штырь, и пассивный агрегат в виде приёмного конуса, рис. 2. На одном конце штыря (коричневый цвет) закреплена сферическая головка увеличенного диаметра с центром в точке a (красный цвет), см. рис. 2. Штырь со сферической головкой входит в состав СМ активного агрегата, рис. 3. Здесь другой конец штыря упруго закреплен во внутренней обойме (голубой цвет) активного агрегата, которая допускает как линейное перемещение штыря вдоль продольной оси ya , так и его угловое перемещение вокруг поперечных осей xa и za относительно точки A, см. рис. 3. При этом внешняя обойма (тёмно-синий цвет) активного агрегата с плоским стыковочным кольцом P r может перемещаться вдоль продольной оси y r космического робота-манипулятора (space robot-manipulator, SRM), см. рис. 3. Пассивный агрегат в виде приёмного конуса C (cone, зелёный цвет) с гнездом и плоским стыковочным кольцом P t жёстко закреплен на корпусе геостационарного спутника связи (geostationary communications satellite, GCS), см. рис. 3.
Конструкции СМ класса «штырь – конус» для перспективных КА представлены в [6,7], а математические модели взаимодействия активного и пассивного агрегатов при стыковке двух КА – в статьях [8,9,10]. Стыковка КРМ с ГСС содержит три последовательно выполняемых этапа, именно 1) причаливание, 2) стягивание, 3) выравнивание и фиксация, которые кратко описываются ниже.
-
1. При швартовке ( причаливании ) КРМ к ГСС головка штыря после нескольких соударений с поверхностью приёмного конуса C проникает внутрь гнезда через его горловину с электромеханическим затвором, который отмечен голубым цветом как на рис. 2, так и на рис. 3. При этом событии затвор срабатывает и уменьшает проходной диаметр горловины гнезда до диаметра поперечного сечения штыря. В результа-
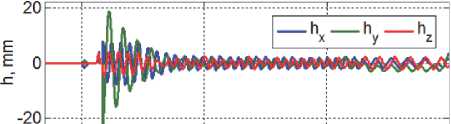
- те между штырем и внутренней поверхностью гнезда вместе с затвором возникает первичная механическая связь, в общем случае в двух точках f, см. рис. 2. Далее происходит поглощение кинетической энергии пространственного относительного движения двух КА в стыковочном механизме за счёт его упругодемпфирующих механических связей при линейных деформациях h i , i = x, y, z, пружин с коэффициентами жёсткости ci и обобщенных сил как вязкого, так и сухого трения, реализуемых фрикционами Φ i, см. обозначения на рис. 3. После затухания скоростей всех координат СМ до приемлемого уровня причаливание завершается и формируется сцепка агрегатов с малыми изменениями их линейных и угловых рассогласований.
-
2. Стягивание агрегатов вдоль продольной оси y r КРМ реализуется электромеханическим приводом класса «винт – гайка» с вектором силы F для внешней обоймы активного агрегата, рис. 3.
-
3. Выравнивание стыковочных колец P r активного и P t пассивного агрегатов и фиксация их взаимного положения выполняется электромеханическими приводами стыковочного механизма.
На рисунке 4 приведена упрощенная схема результирующей жёсткой механической связки КРМ и ГСС после завершения их стыковки. Здесь не представлены панели солнечных батарей (СБ) КРМ и ГСС, бортовой манипулятор антропоморфной структуры с 4 звеньями и 6 степенями свободы [11] находится в походном состоянии и размеры всех элементов конструкции, включая топливные баки электрореактивной двигательной установки (ЭДУ), указаны в метрах.
При описании движения КРМ и ГСС в рассматриваемом режиме применяются (i) экватори-аль-ная инерциальная система координат (ИСК) I ⊕ с началом в центре Земли O ⊕ , (ii) связанная система координат (ССК) B (O xyz ) с началом в полюсе O , которая совпадает с системой координат O r x r y r z r КРМ, (iii) орбитальная система координат (ОСК) O (O x o y o z o) с началом в полюсе O и ортами r o , τ o , n o , которая имеет следующие направления осей и ортов: ось O x o направлена по радиали r o , ось O z o – по нормали
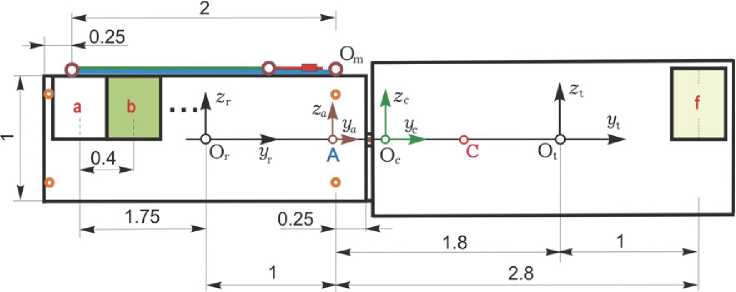
Рис. 4. Схема результирующего соединения космического робота с геостационарным спутником
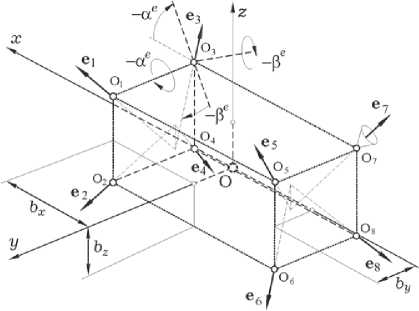
Рис. 5. Схема ЭДУ с 8 каталитическими ЭРД
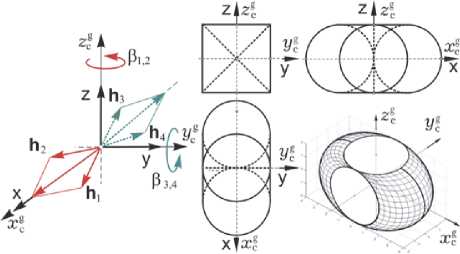
Рис. 6. Схема СГК и область вариации его КМ
n o к плоскости орбиты, а ось O у 0 - по трансверсали т 0 и направлена в сторону орбитального движения КРМ; система координат O t x t у t z t , связанная с ГСС (цель, target) в центре масс O t спутника; система координат A x ayaza , связанная со штырём активного агрегата, и система координат O c x c у c z c приёмного конуса C пассивного агрегата, см. рис 4. Используются также обозначения col( - ) = { • } , line( - ) = [ • ] , ( - , - ) , [ x- ], ( • ) , [ a x ] и ° ,~ для векторов, матриц и кватернионов, а также матриц [ a ] i стандартного элементарного поворота вокруг i -ой оси на угол α при i = 1,2,3 = 1 ^ 3 .
В данном режиме приводами СУД робота-манипулятора являются ЭДУ с 8 каталитическими электрореактивными двигателями (ЭРД) (рис. 5) при широтно-импульсной модуляции (ШИМ) их тяги и силовой гироскопический кластер (СГК) на основе четырех гиродинов (ГД) по схеме 2-SPE с ортами векторов кинетических моментов (КМ) h p ( в p ) , p = 1 ^ 4 , рис. 6, где приведена также область вариации нормированного вектора КМ h ( P ) = S h p ( в p ) кластера со столбцом в = {Р p } и ее проекции на плоскости гироскопического базиса O x g у g z g .
Применяемый явный закон настройки СГК (распределения вектора его управляющего момента M g = {Мg} между ГД) позволяет исключить избыточность кластера с вектором КМ
H = h h ( P ) , где hg - одинаковое для всех четырех ГД постоянное значение модуля его собственного КМ.
Ориентация ССК B в ИСК I @ определяется кватернионом Л = ( X 0 , X ) , где X = { X i } , вектором модифицированных параметров Родрига (МПР) о = { с i } = е e tan( Ф /4) с ортом e e оси Эйлера и углом Φ собственного поворота. В ИСК I @ кинематические уравнения для вектора r r расположения КРМ, кватерниона Л и вектора МПР σ имеют вид
rr = tr‘+®xrr; Л=Л ° й 2о =1 (1 - о2)® +1 о x й +1 (о,®)о.
где вектор ω представляет угловую скорость корпуса КРМ и используется обозначение ( • ) ‘ локальной производной по времени.
Ориентация базиса O в базисе I @ определяется углами рыскания ф 1 = у , крена ф 2 = ф и тангажа ф 3 =0 в последовательности 132, кватернионом Л o и матрицей C o = [ ф 2 ] 2 [ ф 3 ] 3 [ ф 1 ] 1 направляющих косинусов координатного перехода от ОСК к ССК.
Погрешность ориентации базиса B в орбитальном базисе O определяется кватернионом E = Л o ° Л- ( e 0 , е ) , где e 0 = соз( Ф е /2 ), е = sin ( Ф e / 2 ) е e с ортом е e оси Эйлера и
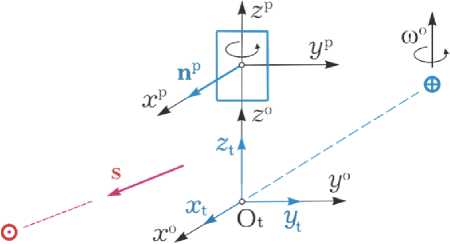
Рис. 7. Штатная ориентация ГСС в ОСК углом Фе, матрицей Се = I3 — 2[ex]Q‘, где Qе = 13e0 + [ex], вектором угловой погрешности 8ф = {8фi} = {2e0ei} и вектором МПР СТе = {сте} = ee tan(фе / 4). При этом вектор погрешности по угловой скорости вычисляется в виде 8® = ® — Се®°(t), где вектор ®°(t) представляет скорость вращения базиса O в базисе I @ .
Если считать КРМ твёрдым телом с массой mr и тензором инерции J r, то модель динамики его пространственного перемещения в проекции на оси ССК Or xyz имеет вид mr (v'r + ®x v ) = Pе + Fd;
(2) J r ® + ® x G = M g + M е + T d.
Здесь G = J ω+ H является вектором КМ робота, векторы P е , М е и M g =— H ' представляют соответственно управляющие силы РДУ, моменты РДУ и СГК, а векторы F d и T d -внешние возмущающие силы и моменты. Применяемые в СУД робота дискретные алгоритмы широтно-импульсного управления ЭДУ и цифрового управления СГК детально представлены в [12].
На рисунке 7 представлена штатная ориен- тация системы координат Otxtytzt ГСС в ОСК. Здесь орт s нормали к рабочей плоскости панелей СБ регулярно наводится на Солнце, а электрические оси его приёмно-передающих антенн ориентируются на Землю – в надир.
При исследовании динамики причаливания и стыковки КРМ с ГСС анализировались вариации разностей векторов скоростей их поступательного A v = { A v i } и углового A ® = { A® i } движений, а также изменения вектора А ф = { Аф i } взаимной угловой ошибки.
Автоматические режимы причаливания и стыковки как грузовых, так и пилотируемых космических кораблей с международной космической станцией (МКС) на низкой орбите давно и успешно применяются в отечественной космонавтике. Здесь отношение массы КРМ m r к массе МКС (цели) m t составляет = 1/30 = 0.033. В данной работе исследования выполнялись при значениях m r = 3100 кг и m t = 3500 кг, т.е. для отношения масс 3.1/3.5 » 0.89 (в 27 раз большем) для КА на геостационарной орбите. Основная цель статьи заключаются в анализе динамики автоматического причаливания и стыковки КРМ с ГСС при их сопоставимых инерционных характеристиках по массе и тензору инерции, включая приведение сформированной жесткой связки этих двух КА в орбитальную систему координат с последующей угловой стабилизацией.
РЕЗУЛЬТАТЫ ИМИТАЦИИ ДИНАМИКИ СТЫКОВКИ
Исследование выполнено при значениях параметров систем управления космического робота и ГСС, представленных в статьях авторов [13,14]. В таблице 1 приведена информация об
Таблица 1. Этапы причаливания и стыковки космического робота с геостационарным спутником связи
|
№ п/п |
Служебные операции этапа |
Полуинтервал времени t |
Управление СГК КРМ |
Управление ЭДУ КРМ |
|
1 |
Наведение штыря на приёмный конус, терминальное управление |
t е [0,137), 5 |
Наведение и управление ориентацией |
Управление с ШИМ тяги |
|
2 |
Ударные перемещения штыря в конусе до захода его головки в гнездо |
t е [137,141.8), 5 |
Стабилизация и компенсация возмущения |
Разгрузка СГК с ШИМ тяги |
|
3 |
Перемещения головки в гнезде, поглощение энергии, причаливание |
t е [141.8,161.7), 5 |
Стабилизация и компенсация возмущения |
Разгрузка СГК с ШИМ тяги |
|
4 |
Стягивание до уровня 10 мм между стыковочными плоскостями |
t е [161.7,211), 5 |
Стабилизация и компенсация возмущения |
Разгрузка СГК с ШИМ тяги |
|
5 |
Угловое выравнивание стыковочных плоскостей, завершение стыковки |
t е [211,261), 5 |
Стабилизация и компенсация возмущения |
Разгрузка СГК с ШИМ тяги |
этапах причаливания и стыковки КРМ с ГСС. Рисунок 8 представляет траекторию перемещения центра головки штыря (точка a, красный цвет, см. рис. 2.) при швартовке КРМ к ГСС. Здесь 3-D отображение траектории показано на рис. 8 а , а проекция этой траектории на плоскость x c O c y c системы координат приёмного конуса – на рис. 8 b.
Изменение координат взаимного перемещения КРМ и ГСС, а также деформации пружин активного агрегата в процессе причаливания КРМ к ГСС приведены на рис. 9 и 10 соответственно. Здесь исследованы потенциальные возможности увеличения вязкого демпфирования координат активного агрегата при использовании реологических суспензий, управляемых магнитным полем.
Рисунки 11, 12 и 13 представляют динамические процессы приведения сформированной жесткой связки этих двух КА в ОСК с последующей угловой стабилизацией.
ЗАКЛЮЧЕНИЕ
Рассмотрены задачи управления космическим роботом-манипулятором в процессе его причаливания и стыковки с геостационарным спутником связи при использовании стыковочного механизма класса «штырь – конус». Выполнен анализ динамики при вариации терминальных условий причаливания и кратко представлены результаты компьютерной имитации.
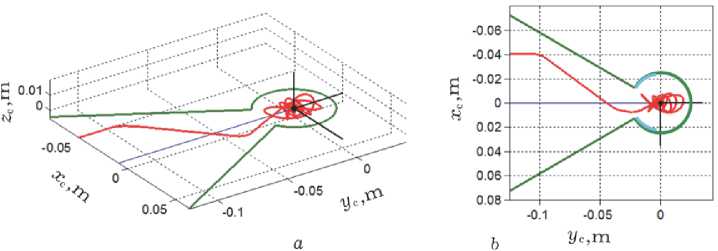
Рис. 8 . Траектория перемещения центра головки штыря при швартовке КРМ к ГСС
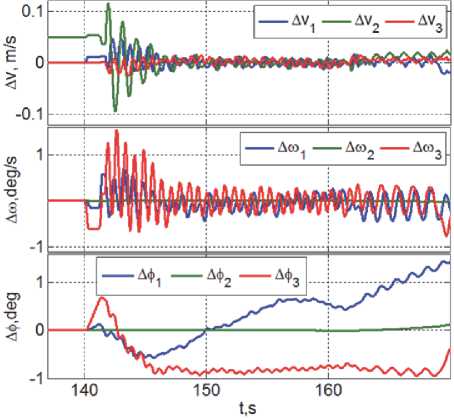
Рис. 9. Изменение координат взаимного движения КРМ и ГСС при швартовке
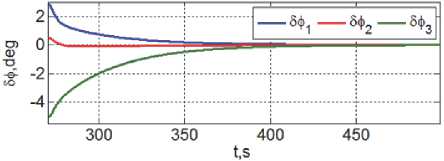
Рис. 11. Ошибки ориентации после стыковки
140 150 160
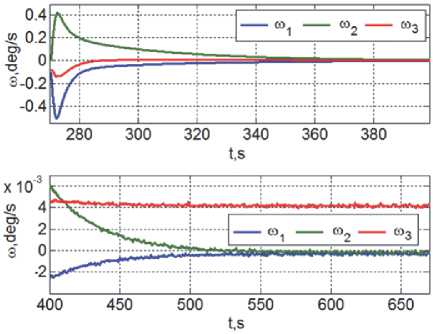
Рис. 12. Угловая скорость после стыковки
t,S
Рис. 10. Деформации пружин активного агрегата в процессе причаливания КРМ к ГСС
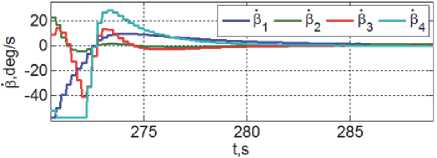
Рис. 13. Цифровые команды управления СГК
Список литературы Динамика причаливания и стыковки космического робота-манипулятора с геостационарным спутником
- Сомов Е.И., Бутырин С.А., Сомов С.Е. Дополнительное выведение и сближение космического робота для обслуживания геостационарного спутника // Известия Самарского научного центра РАН. 2021. Том 23, № 2. С. 75-83.
- Somov Ye., Butyrin S., Somov S., Somova T. Attitude and orbit control of a space robot at launching, rendezvous and checking the geostationary satellite state. Mathematics in Engineering, Science and Aerospace. 2022. Vol. 13, no. 1, pp. 11-24.
- Somov Ye., Butyrin S., Somova T. A space robot control at approaching and inspecting a geostationary satellite state. Cybernetics and Physics. 2022. Vol. 11, no. 1, pp. 30-36.
- Somov Ye., Butyrin S., Somov S. Attitude and orbit control of a space robot at additional launching and ap-proaching a geostationary satellite. Current Chinese Science. 2022. Vol. 2, no. 3, pp. 173-182.
- Сыромятников В.С. Стыковочные устройства космических аппаратов. М.: Машиностроение, 1984. 216 с.
- Яскевич А.В. Кинематическая схема стыковочного механизма «штырь – конус» для перспективных космических кораблей // Космическая техника и технологии. 2017. № 4 (19). С. 95-104.
- Яскевич А.В. Чернышев И.Е. Выбор параметров накопителя энергии для нового периферийного стыковочного механизма // Космическая техника и технологии. 2019. № 2(25). С. 55-66.
- Яскевич А.В. Контактные силы в уравнениях движения космических аппаратов при стыковке и причаливании // Космическая техника и технологии. 2018. № 2(21). С. 80-92.
- Яскевич А.В. Алгоритмы определения параметров контактов при моделировании стыковки и причаливания космических аппаратов // Космическая техника и технологии. 2018. № 3(22). С. 91-102.
- Яскевич А.В. Особенности динамики стыковки космических аппаратов при использовании периферийного механизма с накоплением кинетической энергии сближения // Космическая техника и технологии. 2019. № 4(27). С. 109-120.
- Бутырин С.А., Сомов Е.И., Сомов С.Е., Сомова Т.Е. Управление роботом-манипулятором при смене топливных баков двигательной установки геостационарного спутника // Известия Самарского научного центра РАН. 2022. Том 24, № 2. С. 96-104.
- Сомов Е.И., Бутырин С.А., Сомов С.Е., Сомова Т.Е. Вывод на орбиту и сближение космического робота с геостационарным спутником // Известия Самарского научного центра РАН. 2020. Том 22. № 2. С. 124-131.
- Сомов Е.И., Бутырин С.А., Сомова Т.Е. Анализ динамических свойств маховиков и гиродинов для управления космическим роботом на геостационарной орбите // Известия Самарского научного центра РАН. 2021. Том 23, № 2. С. 84-90.
- Сомов C.Е., Сомова Т.Е., Бутырин С.А., Сомов Е.И. Сравнение моментных свойств маховиков и гиродинов при сцеплении космического робота с геостационарным спутником // Известия Самарского научного центра РАН. 2022. Том 24, № 1. С. 105-113.
