Динамика тел, погруженных в жидкость

Автор: Павлюк Юрий Степанович, Сакулин Валерий Дмитриевич
Рубрика: Расчет и конструирование
Статья в выпуске: 11 (66), 2006 года.
Бесплатный доступ
Исследуется динамика тел, находящихся в емкости, заполненной несжимаемой идеальной жидкостью. Показано, что уравнения свободных колебаний твердых и упругих тел в жидкости отличаются от обычных уравнений колебаний в воздухе только инерционным коэффициентом. Дается оценка влияния жидкости на характер движения системы с дискретными и распределенными параметрами.
Короткий адрес: https://sciup.org/147151375
IDR: 147151375 | УДК: 534.1:621.01
Текст научной статьи Динамика тел, погруженных в жидкость
Рассмотрим динамику тел, находящихся в емкости (отсеке), заполненной несжимаемой жидкостью. Будем предполагать, что отсек заполнен полностью, т. е. будем пренебрегать волновыми движениями жидкости. Начнем с более простого случая - одномассовой системы, имеющей одну степень свободы (рис. 1).
Рис. 1. Одномассовая система в отсеке, заполненном несжимаемой жидкостью
Примем следующие обозначения: z(t\ - абсолютное перемещение массы, у(?) - заданное перемещение основания, с - коэффициент жесткости упругой связи.
Дифференциальное уравнение движения тела в жидкости проще всего получить из выражений для кинетической Т и потенциальной П энергий и диссипативной функции Ф, используя уравнение Лагранжа второго рода dt\dqJ Qq 8q где q - обобщенная координата.
Значение кинетической энергии можно представить в виде
27 — Mi2 + ДМм2, или 27 = Л7(м + у)2 + ДМ й2, где u^ = z^-y^ - относительное перемещение массы; М- масса тела; ДМ - присоединенная (приведенная) масса жидкости.
Потенциальная энергия П и диссипативная функция Ф имеют однотипные выражения:
2П - си2, 2Ф = гй2.
Через г обозначен коэффициент сопротивления жидкости движению тела.
Используя уравнение Лагранжа (1) для обобщенной координаты и, получим:
{М + ЛМ^й +гй+си = —М у . (2)
При известных параметрах ускорения у (?) уравнение (2) позволяет определить соответствующие характеристики динамического состояния тела, находящегося в емкости с жидкостью.
Коэффициент сопротивления жидкости движению тела обычно оценивается с помощью ло-сЗ гарифмического декремента колебаний дж по формуле г = ——. Частота собственных колебаний тела в жидкости сож при малом затухании определяется выражением
2 _ С _ ____
^ " М+ДМ -1 + (ДМ^М ’ где и^ = с/М - частота собственных колебаний тела в воздухе.
Приведенная масса жидкости может быть определена по формуле
ДМ = мМж, (3)
где м - коэффициент приведенной массы; Мж - масса жидкости, вытесненной телом.
С учетом (3) формуле для квадрата частоты собственных колебаний тела в жидкости можно придать вид
Если влияние границ жидкого объема несущественно, т. е. можно рассматривать колебания тела в безграничном объеме жидкости, то коэффициент присоединенной массы м = 1.
Рассмотрим теперь колебания двухмассовой системы, имеющей две степени свободы (рис. 2).
Введем обозначения: zT и z2 - абсолютные перемещения первой и второй масс; их и м2 -относительные перемещения масс; у - заданное перемещение основания; q, и с2 - коэффициенты жесткости упругих связей; и г2 - коэффициенты сопротивления движению тел; Мх и М2 - массы тел.
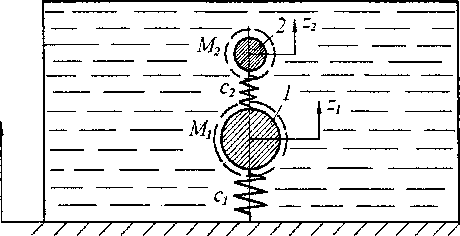
Рис. 2. Двухмассовая система в отсеке, заполненном несжимаемой жидкостью
Учитывая, что иг = Zj -у, u2=z2- zx, запишем выражение для кинетической энергии системы:
27 = Мх (й] + у)2 + ДМ у йу + М2 (м2 + й] + уУ + ДМ г (й2 + “i У, где М, - масса / -го тела; ДМ, - присоединенная масса жидкости i -го тела.
Потенциальная энергия П и диссипативная функция Ф в данном случае имеют вид
277 = Су и/ + с2 и2, 2Ф = Гу 2/2 + г2 й2.
Используя уравнение Лагранжа (1) для обобщенных координат их и и2, получим:
(Му + ДМ у )йх + Гу йу + Су их -г2й2- с2 м2 = -Мх у,
(М2 + ДМ^ )(“г + “1) + т2 й2 +с2и2= -МгУ-(5)
Если связь между массами слабая (т. е. с2 « сх ), то система этих уравнений распадается на два независимых уравнения:
УМ + ДМ\ )й'1 + гх йх + сх их = —Мх у,
-
(М2 + ДМ2 )“г + г2 й2 + с2 м2 = -М2 у - (М2 + ДМ2 )йх.
Следовательно, свободные колебания масс, образующих систему, будут происходить независимо одно от другого. Частоты собственных колебаний можно рассчитывать независимо:
и4,ж" м^у^дм^/мУ
О)
Отсюда можно получить другое условие для разделения уравнений (5): частота собственных колебаний второй массы должна быть намного меньше частоты собственных колебаний первой, т. е. должно быть и^ж «1ЦХж.
Таким образом, в ряде практических случаев можно рассчитывать динамические параметры первой массы независимо от второй, а характеристики колебаний второй массы определять затем, используя в качестве воздействия на нее характеристики движения первой.
Если связь между массами жесткая (с, « с2, или и^ж « и^ж ), то обе массы можно объединить в систему с одной степенью свободы, имеющую жесткость сх , массу М = Мх + М2 и частоту лт(1 + (ж)М)' (8) Уравнение колебаний такой системы имеет вид (2).
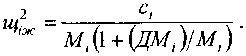
Изложенный подход можно применить и к многомассовой системе. Как следует из рассмотренных примеров, уравнения свободных колебаний твердых тел в жидкости отличаются от обычных уравнений колебаний в воздухе только инерционным коэффициентом. Поэтому уравнения свободных колебаний упругих тел в жидкости можно получать любым подходящим методом, добавляя к массе тела присоединенную массу жидкости. Это утверждение справедливо и для балочных упругих конструкций. Так, например, свободные колебания сосредоточенной массы, жестко связанной с консольной невесомой балкой (рис. 3), расположенной в жидкости, описы ваются уравнением
(М + ДМУг + ^-z-O.
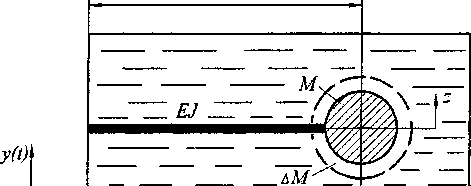
Рис. 3. Консольная невесомая балка с сосредоточенной массой, расположенные в жидкости
Введем в рассмотрение приведенный коэффициент жесткости с„р
ЗЕЛ
—— и перепишем урав
нение (9) в следующем виде:
^Ма-ДМ^с^-О.
Коэффициент спр легко определяется для различных систем методом конечных элементов.
Вынужденные колебания рассматриваемых систем при действии на основание кинематического возбуждения у^ можно получить в относительных координатах, добавляя в правую часть уравнений силу Q = -М у:
-
(М + ДМ^й + спр и = -М у. (10)
Рассмотрим изгибные колебания в жидкости балки с погонной массой т(х) и погонной жесткостью ЕЛ(х) (рис. 4). Будем полагать, что известны формы Дж(х) и частоты иц^. собственных колебаний балки в жидкости, так что относительные поперечные перемещения балки можно представить в виде суммы
Ограничимся учетом лишь первого тона изгибных колебаний балки. Тогда кинетическая энергия колеблющейся балки будет иметь вид
2Т = Jm(x) [у + /1ж (т) ^ ]2 А + \Дт^ f^ (х) S2 dx, о о где Дт^ - погонная присоединенная масса жидкости.
Рис. 4. Упругая балка с распределенными параметрами, расположенная в жидкости
Потенциальная энергия балки будет определяться выражением
277 = jET^) о
Лж \ / О dx2 1
dx.
Диссипативная функция равна
2Ф = зХж ^EJ^
О
J уж W о dx2 1
dx.
где з1ж -дХж!(рщ1ж), дХж - логарифмический декремент первой формы колебаний упругой
конструкции в жидкости.
Используя уравнение Лагранжа (1) для обобщенной координаты ^(г), получим: т„Р ($1 + зХж Щ[ж 8Х + мдж S))~ ~ ^пр У 1
где тпР = /[^M+^Wl/itW^;
о
(И)
о
«/L =—Wx) тпр О
dx2
-12
• dx = —
- 1 +
н/2
/ ид2 = |£j(x) о
У 1ж dx2
о
В случае упругой балки постоянного сечения
2 ^ гг
1 + \Дт) т
где Дт - присоединенная масса жидкости; тж - масса жидкости, вытесненной балкой; т - масса балки.
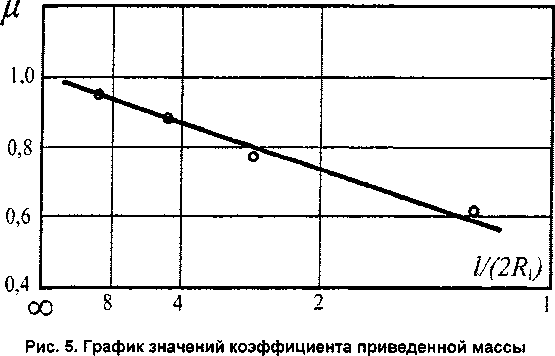
Обозначим через Rx радиус балки. Для круглого длинного цилиндра с l/(2R^>^, совершающего изгибные колебания в безграничном объеме жидкости, л/=1 [1]. При l/(2R^<& значение м в зависимости от //(2^) может быть принято по экспериментальному графику, изображенному на рис. 5 [1].
Влияние зазора между стенками полости и балкой большого удлинения l/^2Rx^>% на частоты ее собственных колебаний можно оценить при помощи зависимости коэффициента м от величины отношения радиуса емкости Ro, в которой колеблется балка, к радиусу балки Rx по формуле [1]
м= р р
при
(1
^0/^1
С возрастанием отношения R0/Rx влияние стенок полости уменьшается, а при R0/Rx >2 коэффициент ц = 1, т. е. частотные характеристики балки близки к тем, которые имеют место при ее колебаниях в безграничном объеме жидкости.
Рассмотрим на конкретном примере, как влияет жидкость на параметры движения внутренних элементов, находящихся в емкости. Пусть колебания тела в жидкости описываются уравнением
-
7 1
и + 2йжм + ^м = -7— z х У- (14)
(1 + ДМ/М)
Будем полагать, что параметры внешнего кинематического воздействия y(t) заданы в виде спектральной плотности ускорения, которая представляет собой нормальный белый шум с интенсивностью So. Тогда решение уравнения (14) получим в виде [2]:
* 4h, (1+ДМ(мУ
Приближенное значение дисперсии относительного ускорения
Пй = ----------.
4ИЖ (и дм/м¥
Учитывая, что ж х+дм/м и принимая м = 1, из (15) находим
Що __1______
4^ ^МЖ/МУ’ где ги^ - собственная частота колебаний тела в воздухе.
В случае колебаний тела в воздухе (Мж = 0) дисперсия относительного ускорения тела будет определяться по формуле
D^S^MV (17)
где h0 - параметр, характеризующий затухание колебаний тела в воздухе.
В частности, для Иж= Иц из (16) и (17) следует:
^ = 0^M^°' (18)
При сделанных допущениях коэффициент Кж -(1 + Л/ж/Л/)3 показывает, во сколько раз дисперсия относительного ускорения тела в жидкости меньше дисперсии относительного ускорения тела в воздухе.
При увеличении Мж (т. е. при увеличении плотности жидкости или увеличении объема тела) дисперсия относительного ускорения тела снижается.
Список литературы Динамика тел, погруженных в жидкость
- Ударостойкость судового энергетического оборудования/Ю.С. Крючков и др. -Л.: Судостроение, 1969. -253 с.
- Павлюк Ю.С., Сакулин В.Д. Аналитическая оценка вибронагруженности элементов оборудования транспортных агрегатов на этапе проектирования//Динамика и прочность конструкций: Тематич. сб. науч. трудов/Под ред. Ю.С. Павлюка. -Челябинск: Изд-во ЮУрГУ, 1999. -С. 3-7.
