Динамика зубчато-рычажных механизмов на основе эллиптических колес

Автор: Шагиахметов Алексей Ильясович
Рубрика: Расчет и конструирование
Статья в выпуске: 11 (83), 2007 года.
Бесплатный доступ
Представлена математическая модель зубчато-рычажного механизма на основе эллиптических зубчатых колес, реализующего движения с остановкой выходного звена без разрыва кинематической цепи. Проведено сравнение динамических характеристик различных механизмов и предложены рекомендации для выбора механизмов с наилучшими динамическими свойствами.
Короткий адрес: https://sciup.org/147151400
IDR: 147151400 | УДК: 621.01
Текст научной статьи Динамика зубчато-рычажных механизмов на основе эллиптических колес
Качество продукции и повышение производительности труда достигается в результате автоматизации производства. В связи с этим широкое применение в технике имеют машины-автоматы.
Подача обрабатываемого материала в рабочую зону машины-автоматы осуществляется различными транспортно-загрузочными устройствами. Эти устройства основаны на механизмах, преобразующих непрерывное движение в движение с остановками (выстоями). К таким относятся храповые, мальтийские, зубчатые с неполным числом зубьев и другие механизмы.
В храповых механизмах движение ведомому звену сообщает собачка, зацепляющаяся с ним при движении в одном направлении и выходящая из зацепления при движении в обратном направлении. Главный недостаток храповых механизмов заключается в том, что в начале и конце фазы движения имеют место удары [1].
Значительно большее распространение по сравнению с храповыми получили мальтийские механизмы, обеспечивающие более благоприятные кинематические характеристики. Выходное звено мальтийского механизма выполняется в виде диска или стола, на котором расположено несколько пазов. В паз может входить палец, расположенный на ведущем кривошипе. К недостаткам мальтийских механизмов относят наличие ударов в начале движения [2].
В зубчатых механизмах с неполным числом зубьев вращение ведомого звена, имеющего зубья по всей окружности, будет происходить в пределах некоторого угла, соответствующего зацеплению его с ведущим зубчатым колесом, имеющим зубья не на всей окружности. Недостатком зубчатых механизмов с неполным числом зубьев является наличие удара в моменты начала зацепления [2].
Таким образом, основным недостатком вышеперечисленных механизмов является разрыв кинематической цепи на время остановки с последующим ее замыканием на время движения, что приводит к жестким ударам, вследствие чего возникают большие динамические нагрузки на детали механизма периодического движения (МПД), приводящие к их быстрому износу.
Существуют другие МПД, которые обеспечивают остановку без разрыва кинематической цепи. Это комбинированные механизмы, в которых рычажные системы и системы круглых зубчатых колес включены параллельно, причем звенья рычажного механизма несут на себе оси зубчатых колес таким образом, что, по крайней мере, одно из них движется вместе с шатуном. Такие механизмы получили название зубчато-рычажные [1].
Исследования зубчато-рычажных механизмов (ЗРМ) на основе круглых зубчатых колес показали их ограниченные кинематические возможности [3].
Использование в зубчато-рычажных механизмах периодического движения (ЗРМПД) некруглых зубчатых колес [4] позволяет существенным образом расширить их кинематические возможности.
На рис. 1 представлена схема зубчато-рычажного механизма на основе эллиптических зубчатых колес. Устройство представляет собой совокупность рычажного кривошипнокоромыслового механизма, ведущее (кривошип 1) и ведомое (коромысло 3) звенья которого шарнирно соединены с шатуном 2 и основанием 4, и передаточного зубчатого механизма для передачи вращения от кривошипа 1 на ведомый вал (на рис. 1 не показан), расположенный соосно с шарниром Оз, соединяющим коромысло 3 с основанием 4.
Передаточный зубчатый механизм выполнен в виде зацепляющихся между собой эллиптических зубчатых колес 5, б, 7 и 8, смонтированных на звеньях рычажного механизма. Колесо 5 и кривошип 1 жестко закреплены между собой таким образом, что колесо 5 вращается относительно центра 01 вместе с кривошипом. Колеса 5 и 7 имеют возможность поворота и установки под углами 5] и У2 (регулируемое угловое смещение большой полуоси некруглых колес относительно шатуна и коромысла рычажного механизма при расположении на одной прямой кривошипа и шатуна в крайнем правом положении рычажного механизма).
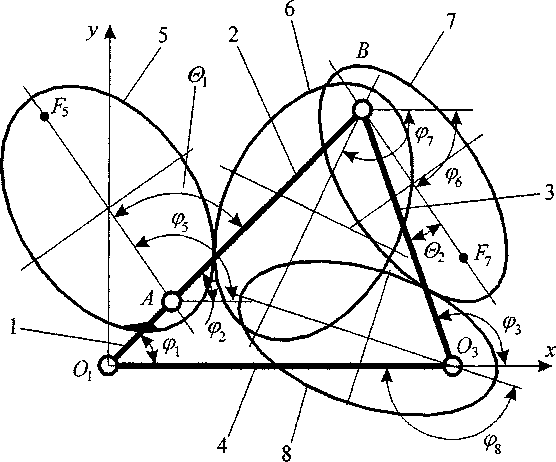
Рис. 1. Схема зубчато-рычажного механизма с эллиптическими зубчатыми колесами
Математическая модель данного механизма, позволяющая определить функцию положения ведомого колеса
^=/(^i)> (О получена из рассмотрения схемы, показанной на рис. 1.
Параметры, определяющие положения шатуна 2 (угол поворота ф2) и коромысла 3 (угол поворота ф3) в зависимости от угла поворота кривошипа фх, легко определить из соотношений базового четырехзвенного механизма [1].
Угол поворота эллипса 5 с учетом монтажных углов определяется следующим образом:
ф5 = фх + 6Х.
Угол поворота эллипса б можно определить из выражения
Фь = Фз + arcsm -— -----------г • sin ф. ,
<1-2^ СО8ф5 + 6])
где ех - эксцентриситет (отношение фокусного расстояния АРз к длине большей оси эллипса) зубчатых колес 5 и б.
Угол поворота эллипса 7 находим из выражения
(Р7 = arcsin
v2ex cos 5, -е2 -1
+arccos
/ / 7 \2 2 j2
yd + b) + c — d
4 2(a + 6)c
c2 + d2 -(a + bV
-arccos------------z—У7 + led 2
где a = OXA, b = AB, с = ОД , d = BO2.
И, наконец, положение ведомого звена определяет угол поворота эллипса 8: . ( \-е2 . )
% = arcsin —--------rsmp7 + р3 ,
V1 - 1ег cos фп + ег )
где е2 - эксцентриситет зубчатых колес 7 и 8.
Ввиду большого числа параметров механизма и сложного вида функции (1) применялся метод оптимизационного синтеза [2]. В процессе многопараметрического поиска было просчитано 50 000 наборов параметров зубчато-рычажных механизмов на основе эллиптических колес и были выбраны два механизма, обеспечивающие наибольшие остановки выходного звена при допустимой точности позиционирования ^^йои=0,5°.
На рис. 2 представлена зависимость угла поворота выходного звена ф^ от угла поворота входного звена фх , полученная аналитическим расчетом на ЭВМ, для двух выбранных механизмов, в сравнении с механизмом, обеспечивающим максимальный выстой среди ЗРМ с круглыми колесами.
Из рисунка видно, что зубчато-рычажные механизмы на основе эллиптических зубчатых колес обеспечивают более продолжительную остановку выходного звена, чем зубчато-рычажные механизмы, основанные на круглых зубчатых колесах.
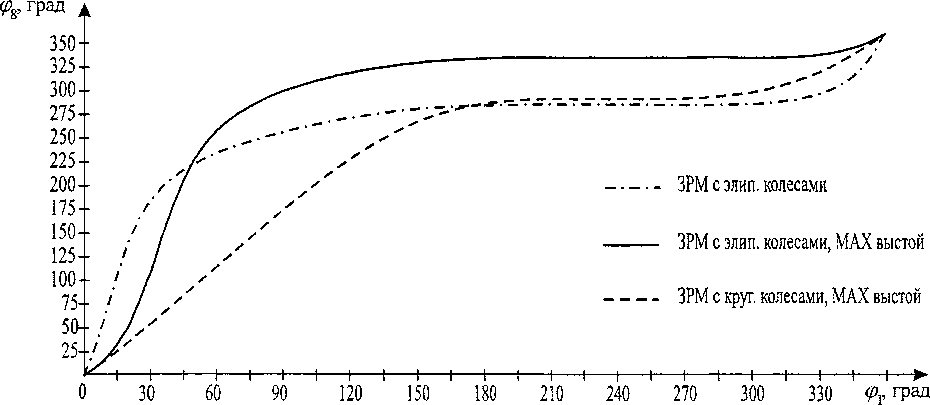
Рис. 2. Г рафик зависимости угла поворота выходного звена от угла поворота входного звена для исследуемых механизмов
Путем графического дифференцирования были получены графики зависимости угловой скорости ы8 выходного звена от угла поворота фх входного звена (рис. 3).
Для оценки динамического момента воспользуемся следующим выражением:
^дин = ^пр " Е% ’ (6)
где £% - угловое ускорение выходного звена механизма, J - приведенный момент инерции зубчато-рычажного механизма.
Приведенный момент инерции зубчато-рычажного механизма на основе эллиптических колес определяем из выражения

где звеном приведения принято входное звено; т\-т% - массы звеньев механизма; Js\-Js% ~ моменты инерции звеньев относительно центров тяжести; vsl-v$8 - скорости центров тяжести звеньев; 0)х - со& - угловые скорости звеньев.
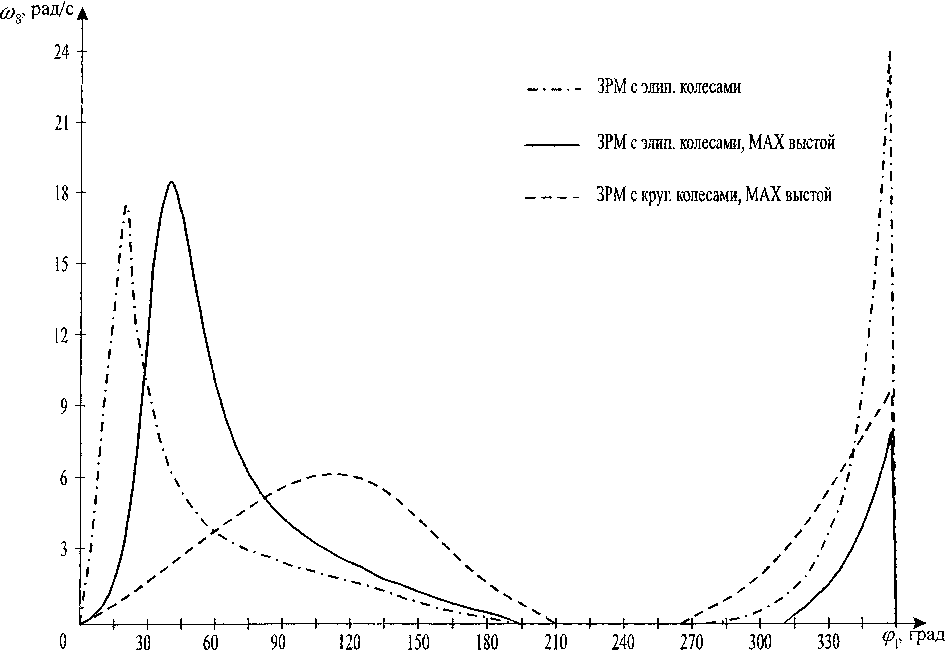
Рис. 3. График зависимости угловой скорости выходного звена от угла поворота входного звена для исследуемых механизмов.
Результаты расчета приведенного момента инерции для зубчато-рычажного механизма на основе эллиптических колес, обеспечивающего максимальный выстой выходного звена, занесены в таблицу.
Значения приведенного момента инерции ЗРМ
|
Фх |
15° |
35° |
45° |
|
J«p |
10,4 |
31,3 |
18,1 |
|
60° |
75° |
330° |
345° |
|
6,6 |
6,1 |
5 |
5,3 |
Угловое ускорение ^ выходного звена механизма часто является определяющим при оценке динамического момента. Для его определения необходимо дифференцировать полученные ранее зависимости угловой скорости <У8 выходного звена от угла поворота фх входного звена. Графики зависимости углового ускорения £8 выходного звена от угла поворота фх входного звена показаны на рис. 4.
Анализ графиков зависимости углового ускорения 5g выходного звена механизма от угла поворота фх входного звена показал, что ЗРМ с эллиптическими колесами имеют большие ускорения по сравнению с ЗРМ на основе круглых зубчатых колес. При этом максимальный выстой зубчато-рычажного механизма на основе эллиптических колес может быть обеспечен с меньшим угловым ускорением, а следовательно и с меньшими динамическими нагрузками, по сравнению с другим зубчато-рычажным механизмом на основе эллиптических колес.
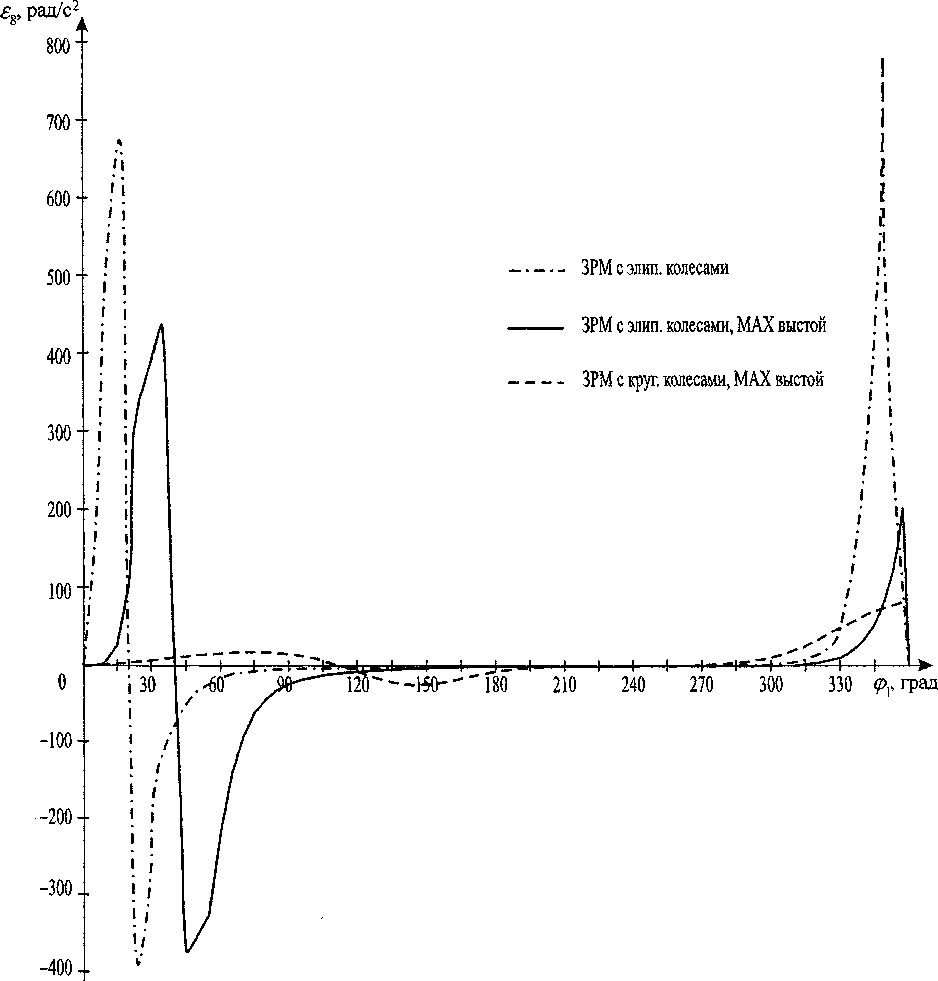
Рис. 4. График зависимости углового ускорения выходного звена от угла поворота входного звена для исследуемых механизмов
Анализ параметров двух рассматриваемых ЗРМ с эллиптическими зубчатыми колесами показал, что чем больше эксцентриситет эллиптических колес 7 и 8, тем больше угловое ускорение £g выходного звена механизма.
Далее, используя выражение (6), был рассчитан динамический момент для ЗРМ с максимальным выстоем (рис. 5).
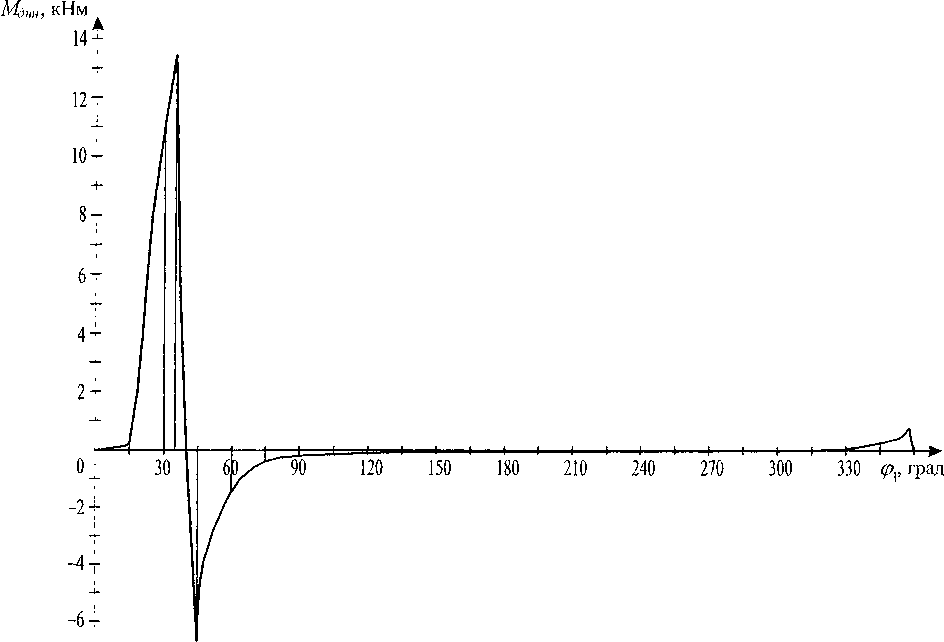
Рис. 5. Зависимость динамического момента от угла поворота входного звена зубчато-рычажного механизма на основе эллиптических колес, обеспечивающего максимальный выстой выходного звена
Выводы:
-
1. Зубчато-рычажные механизмы обеспечивают остановку без разрыва кинематической цепи, вследствие чего не происходит жестких ударов.
-
2. Зубчато-рычажные механизмы на основе эллиптических колес обеспечивают более чем в два раза больший выстой выходного звена по сравнению с зубчато-рычажными механизмами на основе круглых колес.
-
3. Угловые ускорения выходного звена зубчато-рычажного механизма с эллиптическими колесами превышают угловые ускорения выходного звена зубчато-рычажного механизма с круглыми колесами.
-
4. В зубчато-рычажном механизме с некруглыми колесами с увеличением эксцентриситета эллиптических зубчатых колес ухудшаются динамические характеристики, поэтому с целью улучшения динамических показателей необходимо уменьшать эксцентриситет эллиптических зубчатых колес, образующих выходную пару зацепления в механизме.
Список литературы Динамика зубчато-рычажных механизмов на основе эллиптических колес
- Кожевников С.Н. Механизмы (справочник)/С.Н. Кожевников. -М.: Машиностроение, 1965. -460 с.
- Левитская О.Н. Курс теории механизмов и машин/О.Н. Левитская, Н.И. Левитский. -М.: Высшая школа, 1985. -279 с.
- Пожбелко В.И. Структура и кинематические возможности трехколесного зубчато-рычажного механизма периодического поворота/В.И. Пожбелко, А.И. Шагиахметов, Н.И. Ахметшин//Материалы II международной конференции «Проблемы механики современных машин». -Улан-Удэ: Изд-во ВСГТУ, 2003. -Т. 1. -С. 35-39.
- Пат. 2285168 РФ, МПК C1 F16H 27/04. Способ и устройство регулирования угла выстоя зубчато-рычажного механизма/В.И. Пожбелко, А.И. Шагиахметов, Н.И. Ахметшин. Заявлено 22.03.2005; Опубл. 10.10.2006. Бюл. № 28.
