Дискретная модель связанных нелинейных осцилляторов

Автор: Федюнин Э.Ю., Шилин А.Н.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 2 т.19, 2016 года.
Бесплатный доступ
Дискретизирующие последовательности отсчетов импульсных характеристик квазигармонических осцилляторов использованы для перехода к дискретному времени в уравнениях движения нелинейных колебательных систем со многими степенями свободы. В результате предложен конечно-разностный алгоритм моделирования нелинейной динамики осцилляторов. Разностная схема имеет второй порядок точности по дискретному времени, сохраняет форму импульсных характеристик осцилляторов и хорошо стыкуется с методами цифровой обработки сигналов. Приведен пример моделирования нелинейного резонанса в двух связанных осцилляторах Дюффинга.
Связанные осцилляторы, дискретное время, осцилляторы дюффинга, численный эксперимент, нелинейный резонанс
Короткий адрес: https://sciup.org/140255963
IDR: 140255963
Discrete model of the coupled nonlinear oscillators
The sampling sequences of counting of pulse characteristics of quasi-harmonics oscillators are used for transition to discrete time in the equations of the movement of nonlinear oscillatory systems with many degrees of freedom. The finite-difference algorithm of modeling of nonlinear dynamics of oscillators is as a result offered. The differential scheme has the second order of accuracy on discrete time, keeps a form of pulse characteristics of oscillators and is well joined to methods of digital processing of signals. The example of modeling of a nonlinear resonance in two coupled Duffing oscillators is given.
Текст научной статьи Дискретная модель связанных нелинейных осцилляторов
-
1. В работе [1] предложен метод численного моделирования нелинейных колебательных систем, основанный на использовании импульсного отклика линейного резонатора для дискретизации времени в уравнении движения системы. Метод ориентирован на нелинейные колебательные и автоколебательные системы с одной степенью свободы. На практике реальные радиотехнические системы могут содержать несколько резонаторов или описываться осцилляторными моделями высоких порядков. Это, например, многокаскадные резонансные усилители и автогенераторы [2], в том числе кольцевые [3], автогенераторы, стабилизированные дополнительными резонаторами [4], и другие радиосистемы.
-
2. В качестве дифференциальной модели М связанных осцилляторов с вектором состояния u = ( U i , U 2, ^ U m ) рассмотрим систему уравнений движения
В настоящей статье метод работы [1] обобщается на случай многоконтурных нелинейных колебательных и автоколебательных систем. Предлагаемый подход легко сочетается с методами цифровой обработки сигналов.
d2 u to du™ 2 2 z Г du)
—m +_ m—m + to2 u = ю™ f u , , (1)
m m mm dt2 Qm dt V dt)
где to m — собственные частоты осцилляторов; Qm — их добротности; fm ( u , d u / dt ) - функции, описывающие связи и нелинейности в системе осцилляторов.
Альтернативной (1) формой описания колебательной системы является ее интегральная модель в виде системы уравнений Вольтерра второго рода:
t
U m ( t ) = J f m ( U, U ) h m ( t - t) d T + U m ( t ), (2)
где функции времени Um ( t ) описывают свободные колебания в резонаторе, а ядра hm ( t - t) —
импульсные характеристики осцилляторов, удовлетворяющие уравнениям
d 2 hm dt 2
+
to m h mm
Q m dt
+ to mhm
= tom 5( t)
с дельта-функцией в правой части и нулевыми начальными условиями. Решениями уравнений (3) при t > 0 являются функции
h m ( t ) to m
exp
to m t sin(to, t ).
2 Q m ) m
При этом предполагается, что осцилляторы имеют высокие Qm > 10 добротности.
Нетрудно установить, что отсчеты импульсных характеристик (4) на равномерной временной сетке t n = n A t при n > 2 удовлетворяют разностным уравнениям
D 2 { hm ( t n ) } _ h m ( t n )
- 2a m cos( to m A t) hm ( t n - 1 ) + a m i h m ( t n - 1 ) = 0
с начальными условиями hm ( t q) = hm (0) = 0, h m ( t 1 ) = h m (A t ) = a m to m sin(to m A t ), где
I to a = exp--— At m I 2 Qm
Последовательности отсчетов применим hm ( tn ) при переходе к дискретному времени в интегральном уравнении (2). Для этого создадим совокупность дискретизирующих последовательностей
u m ( t 2 ) = 1 A thm ( A t ) f m ( u 0 , u 0 ) + U m ( t 1 ), u m ( t 2 ) = A thm (2 A t ) f m ( u 0 , u 0 ) + U m ( t 2 ).
to hm (t) = At £hm(tk)5(t - tk). (6)
k = 0
Импульсные характеристики hm (t - т) в (2) заменим последовательностями (6). После интегрирования для значений решения на временной сетке tn получим систему уравнений дискретной свертки um(tn) =
3. Рассмотрим пример – нелинейный резонанс в связанных осцилляторах Дюффинга. Осциллятор Дюффинга является базовым объектом классической теории колебаний [5] и, в то же время, может служить моделью реальных радиосистем, например, колебательного контура, перестраиваемого варикапом [6].
Исходная система уравнений движения идентичных реактивно связанных осцилляторов с собственными частотами to o и Q имеет вид
d 2 U
dt 2
to0 dU
Q dt
+ to2 U =
n
= A t £ f m ( u ( t k )> u ( t k ) ) h m ( t n - t k ) + U m ( t n )• k = 0
= -цtoOU3 + KtoO (V - U) + tooS(t),
d 2 V dt 2
to 0 dV
Q dt
+ to2 V =
Теперь обе части уравнений (7) подвергнем воздействию разностных операторов D 2 ( 0 } . При n > 2 это приводит к следующему результату:
D 2 { u m ( t n ) } =
= A th m (A t ) f m ( u ( t n - A t ), u ( t n - A t ) ) .
Отметим, что в процессе преобразования правой части (8) использованы уравнения (5) и аналогичные им уравнения D 2 { Un ( tn ) } = 0, а также равенства hm (0) = 0. Следует обратить внимание на то, что равенства hm (0) = 0 приводят к зависимости правой части (8) от момента времени tn - A t = tn - 1 и позволяют получить явный алгоритм моделирования автоколебаний при аппроксимации производных u ( tn - 1 ) левыми разностями. Ограничиваясь трехточечной аппроксимацией, имеем
3 u ( t n - 1 ) - 4 u ( t n - 2 ) + u ( t n - 3 )
2A t ■
u ( t n - 1 ) =
Таким образом, алгоритм моделирования колебаний в системе связанных нелинейных осцилляторов задается системой рекуррентных соотношений um(tn ) 2am cos(tom At)um(tn-1) +
+ a m u m ( t n - 2 ) = A thm ( A t ) f m ( u ( t n - 1 ), u ( t n - 1 ) ) ,
где n = 3,4,..., а значения um ( t 1 ) и um ( 1 2 ) в соответствии с интегральными уравнениями (2) определяются по начальным условиям U o, u 0 с помощью выражений
= -цtoOV3 + Kto2 (U - V).
Здесь ц и к — параметры нелинейности и связи; S ( t ) – сигнал внешнего воздействия на один из осцилляторов.
При проведении расчетов собственную частоту to0 будем измерять в единицах частоты дискретизации to d = 2п / A t : Qo = to o / to d , а также введем обозначения
X = h(At)At = nQo exp I -
Qo
2 Q
и Un = U ( tn ), Vn = V ( tn ). Тогда алгоритм моделирования (10) для системы уравнений (11) примет вид
Un - 2a cos(2nQ0) Un - 1 + a2 Un - 2 =
= 2X sin(2nQo) x
х ( -ц U n - 1 +k( V n - 1 - U n - 1 ) + S n - 1 ) , (12)
V n - 2a cos(2nQ o ) V n - 1 + a2 V n - 2 =
= 2X sin(2nQ o ) ( -ц V 3- 1 + k( U n - 1 - V n - 1 ) ) .
Для оценки достоверности результатов моделирования колебаний в связанных осцилляторах Дюффинга применим разностную схему (12) к расчету амплитудно-частотных характеристик (АЧХ) линеаризованной системы, положив в (11) и (12) ц = 0. Эта задача имеет точное решение — на рис. 1 АЧХ K 1 (Q) и K 2 (Q) первого и второго осцилляторов показаны непрерывными линиями (параметры системы: Qo = 0.1, Q = 20, к = 0.06).
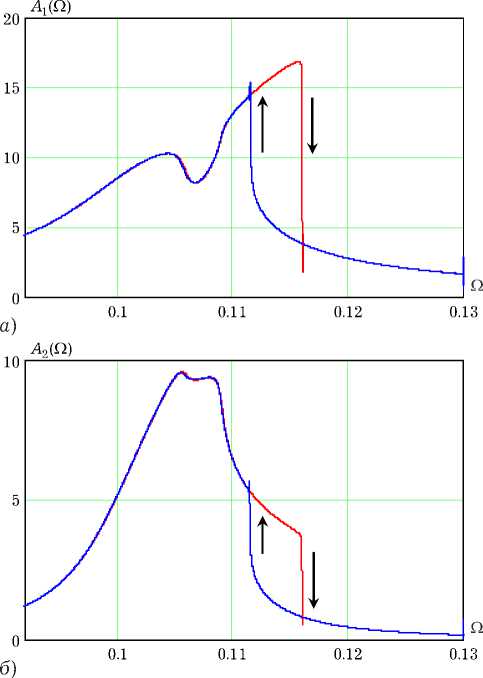
Рис. 2. Частотные зависимости амплитуд колебаний связанных осцилляторов Дюффинга
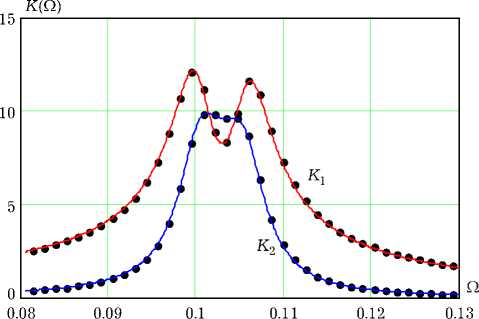
Рис. 1. АЧХ связанных линейных осцилляторов
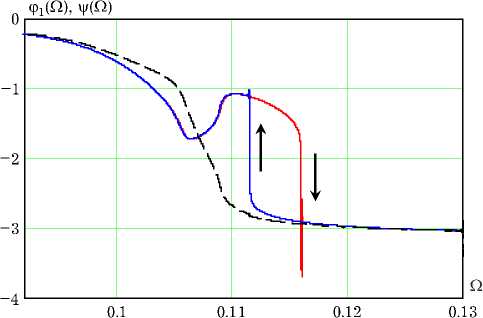
Рис. 3. Частотные зависимости фаз колебаний связанных осцилляторов Дюффинга
Точками на рис. 1 показаны результаты расчетов АЧХ с помощью разностной схемы (12). При этом амплитуды оценивались путем квадратичного усреднения установившихся реализаций вынужденных колебаний:
-
A U =2 U 2 n N , A V =2 V n 2 N .
-
4 . Представленный здесь численный метод предназначен для моделирования нелинейных осцилляторных систем. Метод имеет второй порядок точности по дискретному времени, сохраняет форму импульсных характеристик осцилляторов и хорошо стыкуется с алгоритмами цифровой обработки сигналов.
Графики демонстрируют хорошее согласование численных и точных аналитических результатов.
Перейдем теперь к моделированию с помощью (12) связанных осцилляторов Дюффинга. Ряд ре- зультатов для системы с параметрами Ω0 = 0.1, Q = 20, κ =0.06, µ = 0.0012 при единичной амплитуде внешнего воздействия S(t) представлен ниже в виде графиков.
На рис. 2 показаны графики зависимостей амплитуд первых гармоник вынужденных колебаний в первом ( а ) и втором ( б ) осцилляторах от частоты внешнего воздействия. Оценки амплитуд проводились методом аналитического сигнала в численных экспериментах с квази-статической перестройкой частоты в диапазоне 0.09 ≤Ω≤0.13. При этом третья гармоника колебаний удалялась с помощью фурье-фильтрации. Как следует из графиков, частотные зависимости амплитуд характеризуются скачками и гистерезисом. Стрелки на графиках указывают направления скачков при изменениях частоты в сторону повышения или понижения. Выбросы в конечных точках скачков обусловлены затухающими свободными колебаниями.
Фазовые соотношения в связанных осцилляторах Дюффинга иллюстрируют графики, приведенные на рис. 3. Сплошной линией показан график частотной зависимости ϕ1(Ω) разности фаз колебаний в первом осцилляторе и вынуждающих колебаний. Зависимость характеризуется скачками и гистерезисом. В то же время, частотная зависимость ψ(Ω) разности фаз колебаний во втором и в первом осцилляторах – гладкая функция без скачков.
Список литературы Дискретная модель связанных нелинейных осцилляторов
- О дискретных моделях колебательных систем / В.В. Зайцев [и др.] // Физика волновых процессов и радиотехнические системы. 2015. Т. 18. № 1. С. 38-43.
- Уткин Г.М. Автоколебательные системы и волновые усилителя. М.: Сов. радио, 1978. 272 с.
- Зайцев В.В. К анализу флуктуаций в кольцевом автогенераторе // Известия вузов. Радиофизика. 1981. Т. 24. № 2. С. 207-212.
- Ланда П.С. Автоколебания в системах с конечным числом степеней свободы. М.: Наука, 1980. 360 с.
- Хаяси Т. Нелинейные колебания в физических системах. М.: Мир, 1968. 432 с.
- Капранов М.В., Кулешов В.Н., Уткин Г.М. Теория колебаний в радиотехнике. М.: Наука, 1984. 320 с.
