Диссипативность в одной системе прямого автономного управления

Автор: Поливенко Виталий Кузьмич
Журнал: Математическая физика и компьютерное моделирование @mpcm-jvolsu
Рубрика: Математика
Статья в выпуске: 11, 2007 года.
Бесплатный доступ
Получены достаточные условия ограниченности всех решений системы (А), (В) прямого управления при выполнении обобщенных условий Рауса -Гурвица (2).
Короткий адрес: https://sciup.org/14968615
IDR: 14968615 | УДК: 517.925:517.934
On the dissipation of direct control system
The aim of this paper is to investigate dissipation of direct control system x˙1 = f1(u1), u1 = ax1 + bx2 + P1(t), x˙2 = f2(u2), u2 = cx1 + dx2 + P2(t) under the Hurwits type conditions in nonlinear case.
Текст научной статьи Диссипативность в одной системе прямого автономного управления
Получены достаточные условия ограниченности всех решений системы (А), (В) прямого управления при выполнении обобщенных условий Рауса — Гурвица (2).
Рассмотрим математическую модель объекта управления в виде системы xk fk (uk), k 1, 2,
(A)
где { x O (t), x o (t) } — вектор состояния объекта, { u O (x O ,x O , t), u O (x O , x o , t) } — неавтономный вектор управления.
Пусть движения x k (t,t o ,uo), k = 1,2, u o = { u O (x o ,t o ), uO(x o ,t o ) } , x o = { x O ,x O } E R2 = Ox1 x o наблюдаются на промежутках I (t o ) = [t o , + ^ ) V t o > 0 при управлении вида:
{ u O = ax O + bx O + P O (t), u o = cx o + dx o + P o (t);
P k (t) = I P k (s)ds, k = 1, 2, t o
A = ad — bc = 0. (B)
При P k = 0 в работе [4] изучена абсолютная устойчивость системы (A).
В теории автоматического управления (регулирования) (ТАУ) (А), (В) называют системой прямого управления (регулирования) c двумя исполнительными органами f o (u o ) и f o (u o ) .
Для системы (А) с (В) решаем задачу анализа теории автоматического управления (ТАУ): найти область S изменения значений параметров a, b, c, d , свойства функций P k (t) в управлениях u k , для которых система возмущения (А) диссипативна , то есть все ее решения при неограниченном возрастании времени t финально ограничены при любом выборе f k , удовлетворяющих обобщенным условиям Рауса — Гурвица.
Если множество S не пусто, то управления (В) называют законом обратной связи или законом регулирования . Его реализация осуществляется с помощью совокупности измерительных приборов, усилителей, преобразователей и исполнительных устройств, называемых регулятором.
Определение области S осуществляем на основании прямого метода Ляпунова и некоторых качественных приемов исследования диссипативности динамических систем на плоскости, которые разработаны в работах [1–4].
В системе (А) перейдем от координат (x1,x2) к координатам (u1,u2); преобразование (В), осуществляющее этот переход, согласно Л = 0, является невырожденным. Новая система будет иметь вид j ui = afi(ui) + bf2(u2) + pi(t), [ u 2 = cfl(Ul) + df2(u2) + P2(t).
Система (1) является системой непрямого регулирования.
Будем предполагать, что функции f k (u k ), p k (t), k = 1, 2 удовлетворяют следующим условиям:
-
I. Непрерывные функции своих аргументов.
-
II. Функции p k (t) и их первоообразные P k (t) на полупрямой 0 < t o < t < + то ограничены , то есть удовлетворяют для всех t ≥ t o неравенствам:
| p k (t) | < m, | P k (t) | < M,k = 1, 2, m,M — const.
-
III. Cуществуют числа U k > 0 и функции e(u k ) > 0, k = 1, 2 такие, что в множестве
G = {(U1,U2) : |U1| >U0 |U2| >Uk} выполняются обобщенные условия Рауса — Гурвица:
J ah i (u i ) + dh2 (U 2 ) [Л x h i (u i )h 2 (u 2 )
< - £ ( u1 ) — ^(и 2 ),
> e(u i ) + 6^ 2 ),
f k ( u k ) h k (U k ) = ------- u k
| u k I > U k ; (2)
причем lim uks(uk)sgnuk = +w, k = 1, 2. |uk |→+∞
Пусть матрица B =


устойчива, то есть
Л = det B = ad — bc > 0 SpB = a + d < 0.
Замечание 1. Неравенства (3) — условия Рауса — Гурвица для двумерной линейной однородной системы x = Bx обеспечивают отрицательность вещественных частей собственных чисел матрицы B , согласно чего и условия II все решения линейной неоднородной системы зс = Bx + P(t), P(t) =
P 1 ( t )
P 2 ( t )
будут ограничены при t > t o > 0 .
Замечание 2. Если функции f k (u k ) = u k , k = 1, 2 , то система (А) — линейная неоднородная система, и при выполнении условий Рауса — Гурвица (3) согласно замечанию 1 эта система диссипативна.
В дальнейшем будем считать c > 0 (в противном случае этого можно добиться заменой v i = u i , v 2 = — u 2 .) Согласно (3) возможны случаи:
-
1) ad < 0 , откуда в силу А > 0 и c > 0 вытекает, что b < 0 ;
-
2) a < 0 , d < 0 , → b < a c d , b — знаконеопределено .
Из (2) и (3) следует, что функции h k (u k ) при | u k | > U O , k = 1, 2, одного знака. В случаe 1 , не умаляя общности, будем считать:
a > 0 , d < 0
(если a < 0, d > 0 , то, переименовав переменные u i на u 2 и u 2 на u1, придем к тому же случаю).
В рассматриваемом случае из (2) следует, что в G функция h i (u i ) + ^(u1) ограничена сверху, а функция h 2 (u 2 ) + ^(U2) — снизу.
Положим:
c i = sup
|u1 |>U 1 o
hi(ui) + ^u2)}; c* = inf hh2(u2) + ^u2)} , 1 1 a 2 |u2 |>U2o 2 2 d откуда и из первого неравенства
в (2) следует, что в множестве G :
ac i + dc2 < 0,
s(ui) hi < hi(ui) +-- a
< c i , c 2 < h 2 (u 2 ) +--^^ < h 2 ( u2 ) ,
причем, если c i и с 2 достигаются, то ac i + dc 2 < 0 , то есть из обобщенных условий Рауса — Гурвица (2) следует ограниченность сверху функции h i (u i ) при | u 1 1 > U 0 и снизу функции h 2 (u 2 ) при | u 2 | > U 2 O .
Кроме того, в случае 1) будем предполагать ограниченность сверху функции h2(u2) при |u2| > U20, то есть имеет место неравенство h2(u2) < c2, c2 = sup
|u2 |>U 2 0
Заметим, что в случае 2) это предположение выполняется автоматически при b > 0 .
Таким образом, из (2)–(4) и предположения (5) приходим к следующим нера- венствам:
h i (u i ) < c i
| u 1 | > U 1 o ,
| u 2 | > U 2 o ,
(5) i
c * 2 < h 2 (u 2 ) < c 2 ac i + dc2 < 0.
В рассматриваемом случае c 2 = 0 , ибо в противном случае при c * = 0 из (5) i следует, что в G h i (u i ) < c i < 0, h 2 (u 2 ) > 0 , то есть функции h i (u i ) и h 2 (u 2 ) противоположных знаков, что противоречит условиям (2) и (3).
Не ограничивая общности, будем считать с 2 > 0 , тогда из (2) и (5) i следует, что c i > 0 и c 2 > 0 [если c 2 < 0 , то из (5) i вытекает, что c i < 0 и c 2 < 0 и, поменяв местами u 1 и u 2 , приходим к тому же случаю].
Лемма 1. Если при c. > 0 в множестве G выполняются обобщенные условия Рауса — Гурвица (2), (3) и (5), то имеет место нeравенство ci >hi(ui) >sx(ui) |ui| >Uo, £i = ^u^ > 0, (6)
c.A при этом |hi(ui)ui| ^ +то при |u11 ^ +то.
Доказательство. В G второе неравенство в (2) перепишем в виде
2 ( U 1 ) (c . h i A) > e(ui ).
c 2
Отсюда, учитывая, что 2 > c. > 0, и 0 < h2(2u2) < 1 при |u2| > U*, получим c.hi(ui)A > e(ui) |ui| > UO.
Откуда и из (5) приходим к требуемому неравенству (6).
Таким образом, в рассматриваемом случае 1):
a > 0, d < 0, ci > 0, c 2 > 0| .
Теорема 1. Пусть выполняются условия I-III, (3), c > 0. Тогда в случае 1 условия: (5), aci + dc*. < 0(7)
(если c , c∗2 — достигаются ), fi(U) — 01^ > f (u0) — qu" u” > u0 (|u0|, |<| >UO);(8)
f2(U) — c^Uy < f2(u?) — c^A U2 > U2 (lUI, IU2I > UO)(9)
2 2 22 2 2 22 2 2 2 22
достаточны для диссипативности системы (1), а все движения системы (А) с неавтономным управлением ограничены при t ^ + то .
Доказательство. Введем в рассмотрение функцию
V i (ui,U 2 ) =
u1
A1
— |hi(ui )|uidui +-(dui c2 2
o
— bu . ) 2 .
Заметим, что при | u 1 | > U 1 o в силу леммы 1 | h 1 | ≡ h 1 . Поэтому
V(ui,u 2 ) > 0 при u 2 + u . = 0.
В G полную производную функции V i (ui,u 2 ) в силу системы (1) можно представить в виде
A
-
V i (ui,u 2 ) = c. hiu i [(ah i + dc 2 )u i + p i ] + (du i — bu . )(dp i — bp . ).
Согласно лемме 1 существует U 1 1 > U 1 o такое, что при | u 1 | > U 1 1 выполняются неравенства:
| (ah i + dc 2 )u 1 | > ^2 + d^ m, b + d _ bc 2 + dc 2
| f i (u i ) | = | h i u i | >A" m >-- С”д— m (0 < C2 < C 2 ).
Тогда при | u i | > U i;, учитывая, что d < 0, b < 0,
| (ah 1 + dc 2 )u 1 + p i | > ^ "d ^ m.
Поэтому в первой четверти при u 1 > U 1 1 , u > U 2 o
I
V 1 <
— h i u i — | du i — bu 2 1 (b + d)m < 0, c 2 d
| du 1 - bu 2 | <
A
-
c ∗ d
h 1 u 1 .
Рассмотрим при | u 1 | > U 1 1 функцию
( du1
V 2 (U i ,U 2 ) = ----
-
bu2)2
,
для которой в силу системы (1) имеем
В силу выбора U 1 1
При этом
при
I
V > (u i ,U 2 ) = (dui
-
bu 2 )[Ah i U i + dpi — bp 2 ].
Ah i u i + dp i — bp 2 > Ah i u i + (d + b)m > 0.
V2(ui,u 2 ) < 0 ui > U i , (du i — bu 2 )u 2 < 0.
Кроме того,
du2 dt <
ui > U i , c 2 (du i — bu 2 )
> — "df i (u i ) — 2m.
В самом деле, выбирая U1 = max { U 0 ,N } ,
где
N = max sup |u1|≤U 1 1
cfi(ui) + m
- dc ∗ 2
; inf Cf i ( Ui> ~ m I = |u1|≤U 11 - dc 2
c max dc∗2
sup ( fi ( ui |u1|≤U 1 1
+ m); inf (fi(ui) — m)| , c |u1|≤U11 c при u1 > U11 , u2 > U21 ddut2 представим и определим знак du2 dt
-
d bC 2 (du 1
1 *
bu 2 ) + b [d(ah i + dc2 )u i + bp 2 ] + d(h 2
-
c 2 )u 2
-
A, h 1 u 1 <
b
<
- d
b

<
d
- bu2) - [(ah i + dc2)ui + bp 2 ] + —f 1 (u 1 ) j-
<
b

- bu2) + 2m + ^f i (u i ) |
< 0
в силу (11), то есть u 2 (t) убывает в области (11).
В верхней полуплоскости плоскости 0u 1 u 2 при u1 < U 1 1 ,u 2 > U 1 вдоль траектории f (t,t 0 ,q o ) системы (1) u 2 (t) также убывает, поскольку вследствие выбора U 1 при | u 1 | ≤ U 1 1 , u 2 > U 2 1
m u2(t) = fi(ui) + dfi(u2) < cfi(ui) + dc*U2 + m = dc* ( fi(ui) +--) < 0 c и при ui < -Uii < 0, u > U2i > 0
u 2 (t) = ch 1 u 1 + dh2u 2 + p2< 0 ch 1 > 0, dc * < 0,
Ui l u 1 = o < af i (0) + bc2U2 + m < 0
при достаточно больших u 2 . Поэтому траектория пересекает cправа налево положительную полуось 0u 2 плоскости 0u 1 u 2 .
В полосе 0 < u 2 < u 2 , где u2 — точка пересечения траектории u(t,t o ,q o ) с положительной полуосью ординат 0u 2
V 2 (U 1 ,U 2 ) < 0 | U 1 | .
В нижней полуплоскости рассуждения аналогичны.
Из дуг линий уровня функций V i (u 1 ,u 2 ), i = 1, 2 и отрезков прямых, u 2 = C можно построить спирали L , раскручивающиеся против часовой стрелки и пересекаемые траекториями системы (1) в сторону начала координат (рис. 1).
Далее, рассуждая как при доказательстве теоремы 2.2 [3], покажем, что траектории системы (1) ограничены.
Допустим, что u(t, t o ,q o ) — произвольная траектория системы (1), проходящая при t = t o через точку q o (u^^u^) , уходит в бесконечность при t ^ + ^ , образуя раскручивающиеся против часовой стрелки витки спирали L .
Пусть q 1 mq 2 , где q 1 (0,u 0 2 ), q 2 (0,u2), u'2 > u 0 2 > U2,, один из таких витков. Рассмотрим кривoлинейный интеграл
I =
I [af i (u i ) + bf2(u2) + P i (t)]du 2 - l
[cf i (u i ) + df2(u2) + P 2 (t)]du i ,
где l — замкнутый контур, образованный витком q 1 mq 2 и отрезком q 1 q 2 оси ординат 0u 2 , и проходимый против часовой стрелки.
Так как интеграл I = 0 вдоль витка q1mq 2 траектории u(t,t o ,q o ) , то считаем, что f 1 (0) = 0 (в противном случае этого можно добиться переносом начала координат).
u02
I = У bf2(u2)du2 + У P1(t)dU2 > --С- (u'22 u020
u02
- u22) + I P2(t)du2 > У P2(t)du2 . (12)
u020
С другой стороны, I = I1 + I 2 , где
I 1
= y[af i (u i ) + bf 2 (u2 )]du 2
- [cfi(ui) + df 2 (u 2 )]du i ,
I 2
= У P i (t)du2
- p 2 ( t ) du 1 .
Применяя к I 1 формулу Грина, получим
I 1
УУaf1 (ui) + df2 (u2)]dui du2, а вследствие условий (7)–(9) —
4 u 0 1
I < (ac + dc 2 )S + I 2 = (ac + dc* 2 )S + X^ У p1(t)du 2 — p 2 (t)du 1 + У p1(t)du 2 , i=1 li u 0 2 0
где S — площадь области, ограниченной витком q 1 mq 2 , l i — части витка, лежащие внутри i -й четверти ( i = 1,.., 4 ).
Покажем, что для витка, достаточно удаленного от начала координат, неравенства (12) и (13) противоречат друг другу. Рассуждая как при доказательстве теоремы 1.3 [2; 3], из геометрических соображений видно, что наиболее неблагоприятным для доказательства является случай, когда вдоль рассматриваемого витка во второй (четвертой) четверти u 1 (t) все время убывает (возрастает), а в третьей (первой) — u 2 (t) сначала убывает (возрастает).
Поэтому, если мы покажем, что в этом случае виток q 1 mq 2 не раскручивается против часовой стрелке, то в других случаях, когда вдоль витка, например, во второй (четвертой) четверти u 1 (t) — не все время убывает (возрастает), он и подавно не может раскручиваться.
В рассматриваемом неблагоприятном случае во второй (четвертой) четверти u 2 ( t ) будет монотонно убывать (возрастать). Поэтому справедливы следующие оценки:
У p i (t)du 2 — p 2 (t)du i < — m(u min — u max ), (14) l2
У p 1 (t)du 2 — p 2 (t)du 1 < — m(umax — u ^min ), (15) l4
где u min ,u min , umax , u max — суть наименьшие и наибольшие значения u i (t) и u 2 (t) на рассматриваемом витке.
Далее рассмотрим третью четверть и внутри нее кривые:
af i (u i ) + 6/ 2^2 ) + m = 0, (16)
af i (u i ) + bf2(^2) - m = 0, (17) cf i (u i ) + dMu) + m = 0, (18) cf i (u i ) + df2(u2) — m = 0. (19)
Согласно (3) и достаточной удаленности витка от начала координат эти кривые при u 1 < - u 1 1 расположены сверху вниз в порядке возрастания номера кривой (рис. 2).
U2
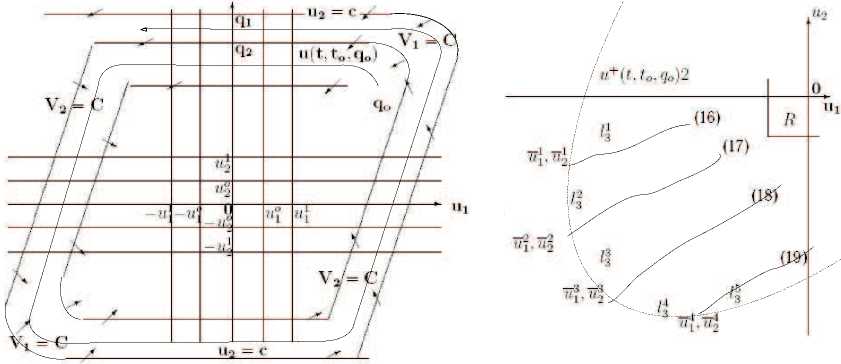
Рис. 1
Рис. 2
Вдоль траектории системы (1) абсцисса u i (t) убывает выше кривой (16), где u 1 < af i (u i ) + bf 2 (u 2 ) + m < 0, возрастает ниже кривой (17), где u i > af i (u i ) + +bf 2 (u 2 ) — M > 0; u 2 (t) убывает выше кривой (18), где u 2 < cf i (u i ) + df 2 (u 2 ) < 0 , и возрастает ниже кривой (19) ( u 2 > cf i (u 2 ) + df 2 (u 2 ) > 0 ).
Следовательно, выше кривой (16) u i (t) и u 2 (t) возрастают; между кривыми (17) и (18) u i (t) возрастает, а u 2 (t) убывает.
Между кривыми (16) и (17), то есть внутри полосы cfi(ui) + df2(u2) + m = 0 cfi(ui) + df2(u2) - m = 0, где u2 (t) — убывает, имеет место неравенство du1 b du2 d
Между кривыми (18) и (19), где ui(t) — возрастает, du2
d
du 1
Разбивая дугу 13 траектории в третьей четверти точками (ui ,иг2), i = 1,.., 4, лежащими соответственно на кривых (16)-(19), на части 13j), j = 1,..., 5, можно показать, что на этих дугах, где ui(t) и u2(t) изменяются монотонно, справедливы оценки:
IPi(t)du2 - p 2 (t)du i
I (1)
l3
< m[(u 1 - u 1 ) - u 2 ],
I Pi(t)du2 - P2(t)dui l3
< m[(u 3 - u i ) - (u 2 - u 3 )],
I Pi(t)du2 - P 2 (t)du i
, (5)
l 3
, z—5 —4
< m(U 2 - U 2 ) - U i ,
(2) (4)
а на дугах l 3 и l 3
IPi(t)du2 - P2(t)dui < i (2)
l 3
- u 2 ),
IPi(t)du2 - P 2 (t)du i <
I (4)
l 3
m
(1 + d) (u i
- u i ).
Вследствие этих оценок получим jpi(t)du2 -p2(t)dui < m l3
d min
2+ b U i
b
+ 2 + -d
min u 2
Аналогично jpi(t)du2 - p2(t)dui < m l1

max u1
+

max u2
Объединяя (14), (15), (20), (21) вследствие (13), получим u2
I < (ac i + dc2)S + m

(U max
-
u
in ) + у
min
p i (t)dU 2 ,
u
//
где S — площадь области, ограниченной контуром l. Продолжая дословно рассуж-
дать как в теореме 1.3 гл. II [2], при достаточно большом u02, из (12) и (22) получим неравенства u2 u2
I P i (t)du 2 < I < -e + IPi(t)du2, u 2 0 u 2 0
которые противоречат друг другу.
Следовательно, для достаточно большого u 0 2 виток q 1 mq 2 не может раскручиваться против часовой стрелки при возрастании t . Отсюда следует, что траектории системы (1) ограничены при t ^ + ^ .
Дальше доказывается, что каждая траектория системы (1) при t ^ + то попадает в некоторую ограниченную область и там остается при дальнейшем возрастании времени t , то есть система (1) диссипативна. Что и требовалось доказать в рассматриваемом случае.
В случае 2: a < 0 , d < 0 , обобщенные условия Рауса — Гувица запишем в виде
J ah i (u i )+ dh 2 (u 2 )< — 6(u i ), f k (u k ) o_
, h k ( u k ) = | u k | > U k ; (22)
A x hi(ui)h2(u2) > s(ui), Uk причем lim u1e(u1)sgnu1 = +^.
| u 1 |→+∞
Откуда в рассматриваемом случае из первого неравенства в (22) следует, что h k (u k ) > 0 при | u k | > U 0 , k = 1,2 .
Лемма 2. Если с > 0 ив G выполнены условия (22), то в случае 2 существует число с2 > 0 такое, что f hi(ui) >> Е*1 |ui| > Uf,
Ih2(u2) > ^2 |U2| >Uf , где
* ^(u 1 )
е1 = ~^: C2 = inf h2 (U2), 1 c2A 2 Ы>и2° причем e1(u1) > e1(u1) и c2> > c2.
Доказательство. В рассматриваемом случае из (23) следует, что h k (u k ) > 0 при | u k | >U f ,k = 1, 2.
Полагая с2 = inf h2 (U2), 2 |u2|>U2o в силу h2(u2) > 0 при |u2| > UO имеем c2 > 0.
Допустим, что с 2 = 0. Тогда существует последоватeльность чисел { u 2 } ( | u 2 | > U2 ), i = 1,2,... , такая, что при i ^ + то h 2 (u 2 ) ^ 0 . Поэтому для каждого фиксированного u1 ( | u 1 1 > U f ) и достаточно большого i
Ah 1 (u 1 )h 2 (u i 2 ) <
e(ui)
Но вследствие обобщенных условий Рауса — Гурвица (23) при выбранных u 1 и i
Ah i (u i )h 2 (u i2 ) > e(u i ), (25)
что противоречит (24). Полученное противоречие показывает, что в случае 2 с 2 > 0 .
Далее, пeреходя в (25) к пределу при i → ∞ , получим неравенство
Ah1(u1)e > e(u1), откуда следуют неравенства (23), причем е1 > £1, так как c2 > с2 > 0. Лемма доказана.
Теорема 2. Если c > 0 , то в случае 2: a < 0, d < 0 , достаточны для диссипативности системы (1).
условия I–III, (2), (3) и (5)
Доказательство. 1. Пусть b>0 . В этом такое, что
подслучае в
силу (23) выбрать U 1 1 > U 1 0
du 2 1 dt
< 0
в областях поскольку при
u 1 < - U 1 1 ,
u 2 ≥
-
U 2 o
u 1 > U 1 1 ,
u 2 ≤ U 2 o ,
| u 1 | > U 1 1 ,
| u 2 | ≤ U 2 o
в силу | u 1 (u 1 )u 1 | >
bH+m , где
-a
H = sup | f 2 (u 2 ) | при | u 2 | < U O , имеем
а при
имеем
в силу выбора U 1 1 и дает область (26).
du 2 1 dt
< | u i | (a | h i U 1 | + b | f 2 (u 2 ) | + m) < 0,
u i > U i , u 2 < - U o u 1 < - U 1 1 , u 2 ≥ U 2 o
du 2
-t^ < -| u i | bH < 0
bh 2 (u 2 ) > 0 при | u 2 | > U20. Объединение областей (27) и (28)
Далее в силу выбора U 1 1 и U 2 1 (см. с. 49)
du 2
-d2 = U2(chiUi + dh 2 U 2 ) < 0
в областях
Кроме того,
|
u 1 ≤ U 11 , |
U 2 > U 21 ; |
(29) |
|
u 1 > - U 1 1 , |
u 2 < - U 2 1 . |
(30) |
|
dV (U 1 ,U 2 ) < 0 при |
||
|
U-U2 > 0, | U 1 1 > |
U 11 , | u 2 | > U 2 o . |
(31) |
Объединение областей (26), (29)–(31) содержит R C (дополнение R ), где
R = { (U 1 ,U 2 ) : | U 1 1 < U 1 , Ы^1} -
Поэтому из отрезков прямых u1 = C, u 2 = C, V 2 (u 1 ,u 2 ) = C можно построить семейство замкнутых кривых L , которые охватывают прямоугольник R и пересекаются траекториями системы (1) в сторону начала координат (рис. 3).
2. Пусть b<0 . В силу выбора U ] 1 > U O , k = 1, 2
V 2 (u 1 , u 2 ) < (du1 — bu 2 )[Ah 1 u 1 — (d + b)m] < 0
в областяx u1 u 2 < 0, | u 1 1 > U 11 , | u 2 | > U 2O ;
du 2 < 0 при | u 2 1 > U1 ; du i < 0 при u . <
-
U 1 1 , u 2 ≤ U 2 o и u 1 > U 1 1 , u 2 ≤ - U 2 o .
Это позволяет из отрезков прямых V2 = C, u1 = C, u 2 = C, лежащих в R C , также построить семейство замкнутых кривых (рис. 4), как и в предыдущем случае.
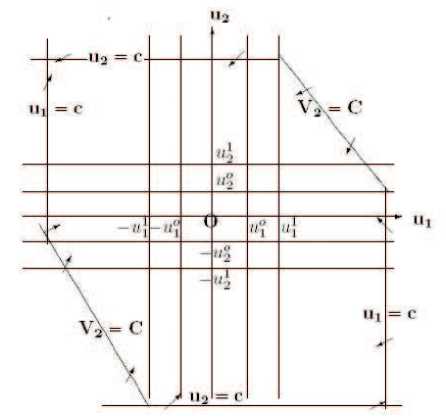
Рис. 3
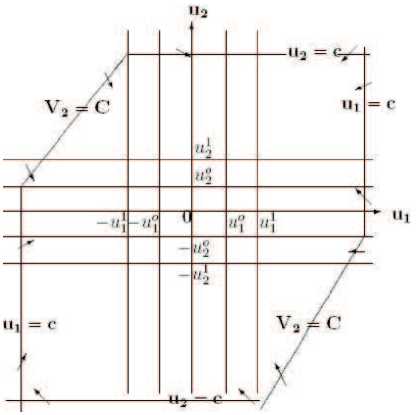
Рис. 4
-
3. Пусть b=0 . Вследствие (23) и e > 0
-
1 du 1 e(u 1 )
1^- < u i + m u . ^ ^ | u i | >U.
-
2 dt dC2
Кроме того, в силу d < 0, С 2 > 0 и непрерывности функции f 1 (u 1 ) в любой полосе | u 1 | < C , где C > U 1 o и достаточно больших | u 2 | ,
2du 2 <ЫНЛЫ 1 + dc2 + m] < 0.
Тогда из отрезков прямых u1 = C, u 2 = C можно построить прямоугольник L , окружающий множество R и пересекаемый траекториями системы (1) в начала координат плоскости 0u1u 2 .
Далее во всех разобранных подслучаях b > 0 и b < 0 вводим в рассмотрение функцию V(u 1 ,u 2 ), такую, что V(u 1 ,u 2 ) = а > 0 тогда и только тогда, когда точка (u 1 ,u 2 ) Е L , где L проведена через точку (0,а) . Очевидно, эта функция определена, непрерывна и положительна в Rc , причем V(u 1 , u 2 ) ^ + то при u. + u 2 ^ + ^ .
Вдоль траекторий системы (1) функция V(u 1 (t),u 2 (t)) монотонно убывает , так как траектории системы пересекают L снаружи внутрь и нигде не касаются ее, что следует из способа построения кривой L .
Таким образом, выполнены все условия теоремы 2.4 из работы Ю.Н. Бибикова [3]. Продолжимость решений системы (1) cледует из существования замкнутой кривой L .
Теорема 2 доказана.
Замечание 3. Если в управлениях u k (x1,x 2 ,t), k = 1,2 функции P k (t) имеют период ω по t , то при выполнении условий диссипативности теорем 1, 2 система (1) ((А)) имеет хотя бы одно ω -периодическое решение (движение).
Список литературы Диссипативность в одной системе прямого автономного управления
- Бибиков Ю.Н. Исследование одной диссипативной системы второго порядка//Вестн. ЛГУ. 1963. T. 21. Вып. 4. C. 14-26.
- Поливенко В.К. О диссипативности одной системы двух дифференциальных уравнений//Дифференциальные уравнения. Минск, 1991. T. 27. Вып. 4. C. 90-98. Деп. в ВИНИТИ 27.07.90, 4295-B90.
- Поливенко В.К. Глобальное поведение решений систем дифференциальных уравнений на плоскости. Волгоград: Изд-во ВолГУ, 1997. 236 с.
- Пoливенко В.К. Абсолютная устойчивость одной системы прямого управления//Вестн. ВолГУ. Сер. 1, Математика. Физика. Вып. 10. 2006. С. 43-49.
