Движение спутника-гиростата, содержащего полость с жидкостью большой вязкости

Автор: Алексеев А.В.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 3 т.9, 2007 года.
Бесплатный доступ
Рассматривается пространственное движение вокруг центра масс спутника-гиростата с полостью, содержащей жидкость, при малых числах Рейнольдса. На основании теоремы об изменении кинетического момента строится математическая модель движения системы несущего тела с жидкостью и трех роторов. Для случая гиростата с одним ротором, основываясь на методе Пуанкаре, определяется приближенное аналитическое решение динамических и кинематических уравнений движения. Делается вывод о диссипативных свойствах жидкости.
Короткий адрес: https://sciup.org/148197992
IDR: 148197992 | УДК: 629.7;
Movement of the satellite - girostate containing a cavity with a liquid of the large viscosity
The spatial movement around of the centre of weights girostate with a cavity containing a liquid of the large viscosity is considered. On the basis of the basic theorems of dynamics the mathematical model of movement of system consisting of a firm body with a liquid and three rotors is under construction. For a case girostate with one rotor, the approached analytical decision of dynamic and kinematic equations of movement is determined. Under the received decisions the influence of a liquid on movement of the satellite is determined.
Текст научной статьи Движение спутника-гиростата, содержащего полость с жидкостью большой вязкости
Динамика движения твердых тел и космических аппаратов (КА) с полостями с жидкостью исследовалась в работах Жуковского Н.Е. [1], Черноусько Ф.Л. [2], Моисеева Н.Н. [3], Рабиновича Б.И. [4, 5], Нариманова Г.С., Докучаева Л.В. [6] и других авторов. К настоящему времени глубоко изучено движение твердых тел с полостью, содержащей жидкость различной вязкости, заполняющей полость полностью либо частично, в линейной и нелинейной постановках, и получены важные результаты по оценке устойчивости различных режимов возмущенного движения. Исследованию движения систем тел с жидкостными компонентами не уделено должного внимания. Поэтому ставится задача исследования движения таких систем. Решение данной задачи важно с прикладной точки зрения при изучении движения спутников-гиростатов и КА с гироскопической стабилизацией.
Математическая модель движения
Рассмотрим движение трехроторного гиростата с полостью в несущем теле, содержащей жидкость большой вязкости, который в дальнейшем будем называть гиростатом с полостью с жидкостью. Введем следующие системы координат [7, 8] (рис. 1): OXYZ – ке-нигова система координат; Oxiyizi и Oxyz – системы координат, связанные с роторами 1–3 и несущим телом 4, соответственно. Оси Ox, Oy, Oz являются осями вращения роторов (тела 1–3). Положение несущего тела относительно системы OXYZ будем характеризо- вать эйлеровыми углами: ψ, θ, ϕ.
Угловая скорость несущего тела ω = ( p, q, r ) представлена в проекциях на оси Oxyz , а векторы угловых скоростей роторов ω i = ( pi, qi, ri ) – на оси собствен ны х связанных систем координат Oxiyizi ( i = 1,3). Относительное движение роторов характеризуется углами и скоростями относительного закручивания 5 i = O i (рис. 1).
Компоненты векторов угловых скоростей роторов ω i , выраженные через компоненты p, q, r угловой скорости тела-носителя, имеют вид:
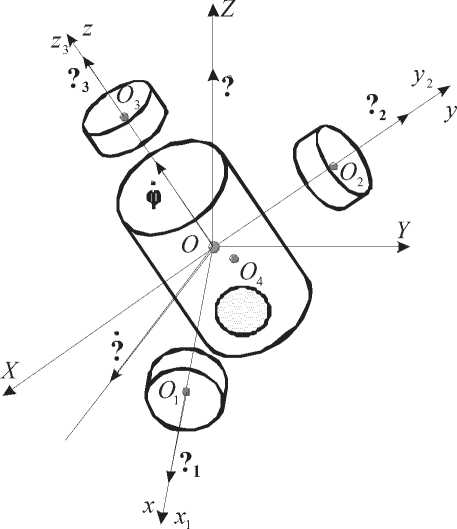
Рис. 1. Схема гиростата с полостью и используемые системы координат
' Р 1 = p + O "1 ,
* q 1 = q cos 5 1 + r sin 5 1 r 1 = r cos 5 1 - q sin 5 1 ,
где E – единичная матрица, D – постоянная
p 2 = p cos 5 2 - r sin 5 2 ,
* q2 = q + a2, r2 = r cos 52 + p sin 52,
p 3 = p cos 5 3 + q sin 5 3 , * q 3 = q cos 5 3 - p sin 5 3 , r 3 = r + a 3 .
Для получения уравнений движения системы тел воспользуемся теоремой об изменении кинетического момента, выбирая в качестве полюса О центр масс системы:
dK O = M dt O .
Пусть рассматриваемая система включает в себя три одинаковых динамически симметричных ротора и динамически несимметричное тело-носитель с полостью с жидкостью. Главные моменты инерции роторов (тела 1–3), вычисленные в свои х связанных системах координат Oxyz. ( i = 1,3), обозначим Ai , Bi , Ci , а моменты инерции тела-носителя в системе координат Oxyz – A4 , B4 , C4 . Введенные моменты инерции не являются центральными, так как начала связанных с телами систем координат совпадают с центром масс системы четырех тел. Осевые моменты инерции роторов равны друг другу: A1 = B2 = C3 = I .
Пусть жидкость внутри полости имеет большую кинематическую вязкость ν ( ν >> 1), что соответствует малым числам Рейнольдса Re ~ v - 1 << 1. Введем малый параметр, характеризующий величину числа Рейнольдса p = pv - 1 << 1, где с - плотность жидкости. Полость с жидкостью характеризуется тензором D = D } [2], который зависит лишь от ее формы и определяет диссипацию энергии за счет вязкости жидкости. Компоненты Dij вычисляются в системе координат, связанной с несущим телом. Пусть полость является сферической, тогда указанный тензор записывается следующим образом: D = О E ,
величина.
Кинетический момент системы относительно центра масс равен векторной сумме кинетических м о ментов несущего тела K 4, роторов K i ( i = 1,3) и гиростатического момента жидкости L относительно точки О :
K о = £ K i + L .
i = 1
Вычисляя производную кинетического момента системы как суммы кинетических
моментов тел и жидкости, используя при этом
локальные производные в связанных систе-
мах Oxiyizi, и Oxyz , уравнение (3) можно за-
писать в системе Oxyz [7, 8]:
Z 8 i i=1
d K i dt
+ to i x K i
—
~
dL
---+ to x dt
L
где знак “~” обозначает локальную производную в соответствующей подвижной системе координат, K i = ( Aipi, Biqi, Ciri ), K 4 = ( A4p, B4q, C4r ) – к и нетические моменты твердых тел, 8 i ( i = 1,3) - матрицы перехода от систем координат Oxiyizi к системе Oxyz (поворот на угол дi вокруг соответствующей оси), 8 4 = E , to 4 = to .
С учетом (1) система (3) в скалярном виде запишется следующим образом:
Ap + ( С - B ) qr + Io\ + 1 ( qa 3 - ra 2 ) = m x ,
Bq + ( A - С ) pr + I(j 2 + I ( ra 1 - pa з ) = m y , (4) Cr- + ( B - A ) pq + Id 3 + 1 ( pa 2 - qr 1 ) = mz ,
где A = Z A , B = Z Bi , C = Z C i . Правые i = 1 i = 1 i = 1
части уравнений (4) представляют собой проекции момента сил, действующих на несущее тело со стороны полости с жидкостью:
m = -
~
dL
---+ to x dt
L
Гиростатический момент жидкости, следуя работе [2], будем определять по формуле:
L = - p D ■ co = - pD E • co
ν где (b = (p, (q, r) - вектор углового ускорения несущего тела. В этом случае выражение (5) можно переписать в виде:
m = - pP g , где m = ( m x , m y , mz ) T , а
p + qr - rq g =
q + rp - pr
r + pq - qp
Уравнения относительного движения роторов, соответствующие углам относительного закручивания дi также могут быть получены из теоремы об изменении кинетического момента каждого из роторов:
I (p + oi ) = Mx , I (q + o 2 ) = My , I (r + o 3 ) = Mz ,
где Mw ( w = x, y, z ) – момент, действующий со стороны несущего тела на ротор, установленный вдоль соответствующей оси. Будем рассматривать движение при отсутствии указанных моментов взаимодействия тел. Тогда система (7) приводится к следующему виду:
o = -p, o2 = -q, o3 = -r. (8)
Для определения момента действия жидкости на несущее тело (6) поступим аналогично процедуре, указанной в работе [2]. В силу малости числа Рейнольдса будем искать указанные моменты с точностью до величины порядка м . Из уравнений (4) выразим компоненты углового ускорения co = ( p , q , r ) с учетом соотношений (8):
p =
[(c - B)qr + I(q°3 - ro2)] (A -1)
[(A - C)pr + I(ro - p°3)]
q =-- 77 —А------
- ^Dg 1 ;
- ^Dg 2 ;
[(B - A)pq+I(po 2- q°i)] (c -1)
- ^Dg 3 -
(9) Продифференцировав выражения (9), найдем вторые производные компонент угловой скорости. Для краткости запишем вторую производную только одной компоненты:
p = ( A -1 11B - CXqr+qr)+
+ 1 ( qo 3 + qd 3 - T"O 2 - rd 2 )] - pDg 1 - ( )
Подставляя выражения (10) в формулу (5) и оставляя слагаемые, порядок малости которых не больше µ, получим зависимость момента, действующего со стороны жидкости, от производных компонент угловой ско- рости не выше первого порядка.
Выражения (4) и (8) представляют собой динамические уравнения движения свободного гиростата (моменты внешних сил равны нулю), состоящего из несущего тела со сферической полостью, заполненной вязкой жидкостью, и трех свободно вращающихся роторов. Система динамических уравнений (4), (8) замыкается известными кинематическими уравнениями Эйлера.
Приближенное аналитическое решение уравнений движения
Рассмотрим систему двух соосных динамически симметричных тел, в одном из которых находится сферическая полость, заполненная вязкой жидкостью. Внутренний момент, действующий на ротор, отсутствует. Уравнения движения такой системы получаются из уравнений движения системы с тремя роторами и полостью, полученных ранее:
Ap - ( A - C ) qr + Iqo = PDs ( Cr + Io ) p , νA
Aq + ( A - C ) pr - Ipo = PD—(Cr + Io ) q , νA
I (r + o) + C 2 r = - PDfs (p 2 + q 2 ), ν
I (r* + o ) = 0, где — = [(A - C)r - Io]A-1 - новая переменная.
Систему (14) после интегрирования последнего уравнения и алгебраических преобразований можно привести к виду:
p - sq = P1 . D_ ps [ C 2 s - I ( r o + o 0 )] v A A - C 2
q + sp = p 4 л D^ qs [ C 2 s - I ( r o + o 0 )]
v A A - C 2 (|5)
C ρD
Arc;s =- v A— ( p + q )
Перейдем к безразмерным величинам и ρD Сω введем малую величину s = — — 2 << 1:
P - SQ = ePS S - -I - ( R о + X 0 )
_ C 2
Q + SP = eQS S - 1- ( R „ + X о ) _ C
5 = - e
A - C2 ""c T
S ( P 2 + Q 2 )
.
p <1> S <0> Q <1> S <1> Q <0>_
= P<0>S<0> [s<0> - IC2-1 (R + X0)], q <1> + s <0> p <1> + s <1> P <0>_
= Q <0> S < 0 > [ s < 0 > - IC 2 ' ( R + X 0 ) ], ,S <1> = - ( A - C 2 ) 2 C 2 - 2 S < 0 > [ ( P <0> ) 2 + ( q < 0 > ) 2 ]
где каждая безразмерная величина ( P , Q , R , S , X ) – есть отношение соответствующей размерной к начальной угловой скорости несущего тела ^ 0 = ^p 2 + q 2 + r 02 , например P = p to 0 - 1 - безразмерная компонента угловой скорости, т = 1ю0- безразмерный параметр времени. “Точка” здесь обозначает дифференцирование по безразмерному времени.
В системе дифференциальных уравнений (16) присутствует малый параметр е , следовательно, для нахождения приближенного аналитического решения применимы асимптотические методы. Воспользуемся методом Пуанкаре [9]. Согласно методу точное решение системы аппроксимируется своим разложением в ряд по степеням малого параметра: ^ ^ ^
P = 1/Р < i > , Q = UQ < i > , S = ^ e i S < i > . (17) i = 0 i = 0 i = 0
В данном случае ограничимся точностью аппроксимации порядка е , то есть оставим в (17) только первые два слагаемых. Подставим разложения (17) в систему (18) и приравняем коэффициенты при одинаковых степенях малого параметра. Получим порождаю-
С учетом порождающего решения последнее уравнение системы (20) запишется следующим образом:
•S A - C 2 )2 C 2-2 S 0 (p„2 + Q02), а его решение с начальными условиями S <1>(0) = 0:
S < 1 > =- ( A - C 2 ) 2 C 2 - 2 S 0 ( P 0 2 + Q 0 2 T . (21)
С учетом (21) первые два уравнения системы (20) образуют систему неоднородных дифференциальных уравнений со специальной правой частью, решение которой при начальных условиях P < 1 > ( 0 ) = 0, Q < 1 > ( 0 ) = 0 легко найти.
Приближенное решение системы (15) для двух компонент примет следующий вид:
P ( t ) = P 0 cos 5 0 1 + q 0 sin 5 0 1 + e —^ t "x ω 0
cC - ( r + ^ ° )
( p 0 cos s 0 1 + q 0 sin s 0 1 ) -
x s 0 -

s ( t ) = s 0
, 2 1 A - C 2 If
+ q 0 ) I ( q 0cos s 0 1 - p 0sin s 0 1 )
I c 2 )
,
щую систему и систему для поправок.
Порождающая система выглядит следующим образом:
st ε 0
ω 0
+ q 02 ) .
P < 0 >
-
S < 0 > Q < 0 >
= 0,
Q < 0 > + S < 0 > P < 0 > = 0,
S < 0 > = 0,
решение которой:
Аналогично решается задача Дарбу. В кинематические уравнения Эйлера подставляются приближенные решения для компонент угловой скорости, и решение определяется в виде рядов (17). Из-за громоздкости полученные выражения не приводятся. Для проверки правильности полученного прибли-
P < 0 > = P 0 cos S 0 т + Q 0 sin S 0 т ,
Q < 0 > = Q 0cos S 0 T - P 0sin S 0 т , (19)
S < 0 > = S 0.
Система для поправок принимает вид:
женного аналитического решения сравним его с результатами численного интегрирования системы (14). На рис. 2 показано соответствие численного и аналитического решений для проекции p угловой скорости несущего тела, на рис. 3 – для угла нутации θ . Сплошными линиями изображены аналити-
ческие решения, прерывистыми – численные.
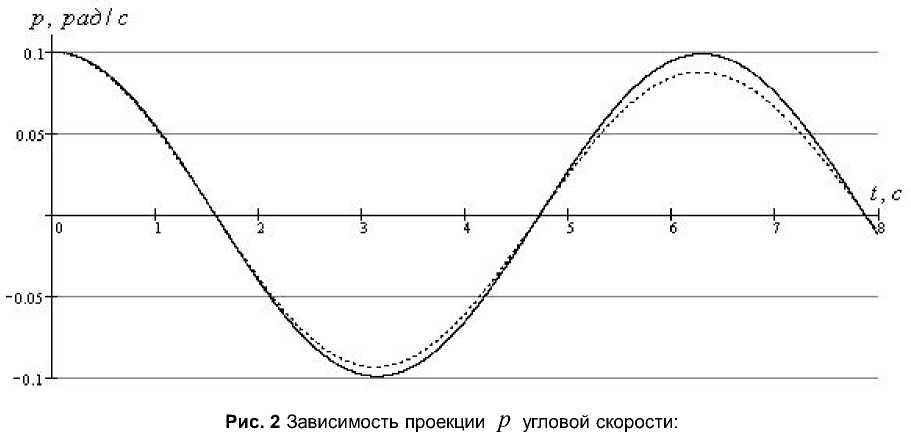
сплошная линия – аналитическое решение, пунктирная – численное
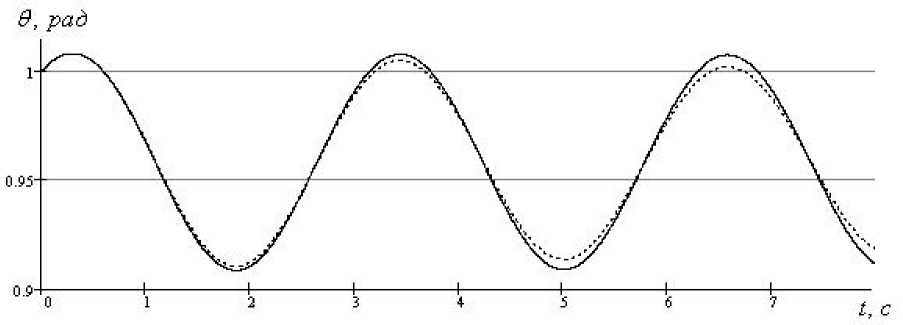
Рис. 3. Зависимость угла нутации θ от времени: сплошная линия – аналитическое решение, пунктирная - численное
По графикам видно, что метод Пуанкаре дает довольно точный результат на небольших промежутках времени. По характеру движения можно сделать вывод о диссипативных свойствах вязкой жидкости. Амплитуда колебаний со временем уменьшается; при отсутствии жидкости такой эффект для свободной системы не наблюдается. Получается, что при движении КА жидкое топливо демпфирует его пространственное движение. Таким образом, в некоторых спутниках можно упростить активную систему демпфирования или вовсе ее не использовать.
Полученные результаты могут быть использованы для исследования движения спутников-гиростатов и КА с двойным вращением, содержащих ЖРД, на пассивных участках их орбитального движения.
Работа выполнена при поддержке Российского фонда фундаментальных исследо- ваний (Грант № 06-08-00325, грант № 06-0100355) и программы поддержки технического образования фонда Alcoa (грант AYF 07003s).
Список литературы Движение спутника-гиростата, содержащего полость с жидкостью большой вязкости
- Жуковский Н.Е. О движении твердого тела, имеющего полости, наполненные однородной капельной жидкостью//Собрание сочинений. Т. 2. Гидродинамика. М.: Гостехиздат, 1949.
- Черноусько Ф.Л. Движение твердого тела с полостями, содержащими вязкую жидкость. М.: ВЦ АН СССР, 1968.
- Моисеев Н.Н., Румянцев В.В. Динамика тела с полостями, содержащими жидкость. М.: Наука, 1965.
- Рабинович Б.И. Математическая модель космического аппарата с полостью, частично заполненной жидкостью. Режим стационарного вращения//Полет. 2003. № 8.
- Рабинович Б.И. Введение в динамику ракет-носителей космических аппаратов. М.: Машиностроение, 1975.
- Нариманов Г.С., Докучаев Л.В., Луковский И.А. Нелинейная динамика ЛА с жидкостью. М.: Машиностроение, 1977.
- Асланов В.С., Дорошин А.В. Стабилизация спускаемого аппарата частичной закруткой при осуществлении неуправляемого спуска в атмосфере//Космические исследования. 2002. Т. 40. № 2.
- Асланов В.С., Дорошин А.В. О двух случаях движения неуравновешенных гиростатов//Известия АН. Механика твердого тела. № 4, 2006.
- Моисеев Н.Н. Асимптотические методы нелинейной механики. М.: Наука, 1969.
